JP2017207181A - 変速機 - Google Patents
変速機 Download PDFInfo
- Publication number
- JP2017207181A JP2017207181A JP2016101491A JP2016101491A JP2017207181A JP 2017207181 A JP2017207181 A JP 2017207181A JP 2016101491 A JP2016101491 A JP 2016101491A JP 2016101491 A JP2016101491 A JP 2016101491A JP 2017207181 A JP2017207181 A JP 2017207181A
- Authority
- JP
- Japan
- Prior art keywords
- gear
- guide pin
- transmission
- dog
- hub
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/083—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts with radially acting and axially controlled clutching members, e.g. sliding keys
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D11/00—Clutches in which the members have interengaging parts
- F16D11/08—Clutches in which the members have interengaging parts actuated by moving a non-rotating part axially
- F16D11/10—Clutches in which the members have interengaging parts actuated by moving a non-rotating part axially with clutching members movable only axially
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/021—Shaft support structures, e.g. partition walls, bearing eyes, casing walls or covers with bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/023—Mounting or installation of gears or shafts in the gearboxes, e.g. methods or means for assembly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/006—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising eight forward speeds
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mechanical Operated Clutches (AREA)
- Structure Of Transmissions (AREA)
- General Details Of Gearings (AREA)
Abstract
【課題】ハブと可動リングとを係合するガイドピンに発生する応力を低減し得る変速機を提供する。
【解決手段】変速機1は、回転軸12と一体に回転するハブHB1と、ハブHB1の周囲に軸方向に移動可能に設けられ、ドグ歯D1を有する可動リングDR1と、回転軸12に対し相対回転可能に設けられ、ドグ歯D1に対向したドグ歯D3を有する変速用ギヤ22と、中立位置からインギヤ位置にかけて可動リングDR1を操作するドグ操作装置とを備える。ハブHB1は、外周面に軸方向に延在するガイド溝を有し、可動リングDR1は、一端部が内周面に設けられた凹部に潤滑油を介して回転可能に挿入され、他端部がガイド溝に係合する略円柱形状のガイドピンを有する。
【選択図】図1
【解決手段】変速機1は、回転軸12と一体に回転するハブHB1と、ハブHB1の周囲に軸方向に移動可能に設けられ、ドグ歯D1を有する可動リングDR1と、回転軸12に対し相対回転可能に設けられ、ドグ歯D1に対向したドグ歯D3を有する変速用ギヤ22と、中立位置からインギヤ位置にかけて可動リングDR1を操作するドグ操作装置とを備える。ハブHB1は、外周面に軸方向に延在するガイド溝を有し、可動リングDR1は、一端部が内周面に設けられた凹部に潤滑油を介して回転可能に挿入され、他端部がガイド溝に係合する略円柱形状のガイドピンを有する。
【選択図】図1
Description
本発明は、ドグクラッチを介して変速段を確立する変速機に関する。
従来より、クラッチカムリングの周囲にクラッチリングを軸方向に移動可能に支持し、クラッチリングの移動に応じて、クラッチリングの側面に設けられたドグ歯と変速ギヤに設けられたドグ歯とを噛合する、または噛合を解除するようにした変速機が知られている(例えば特許文献1参照)。この特許文献1記載の変速機では、クラッチリングの内周面から突設されたカム突部を、クラッチカムリングの外周面のカム溝に係合し、カム突部を介してクラッチカムリングのトルクをクラッチリングに伝達するとともに、変速時においてカム突部をカム溝に沿って摺動させながらクラッチリングを軸方向に移動させる。
しかしながら、上記特許文献1記載の装置では、クラッチカムリングのトルクが作用するカム突部を変速時にカム溝に沿って摺動させるため、摺動抵抗が大きく、カム突部が破損するおそれがある。
本発明の一態様である変速機は、軸線を中心に回転する回転体と、回転体に対し軸方向に相対移動可能かつ回転体と一体に回転可能に設けられ、第1ドグ歯を有する可動リングと、回転体に対し相対回転可能に設けられ、第1ドグ歯に対向した第2ドグ歯を有する変速用ギヤと、第1ドグ歯が第2ドグ歯から離間した中立位置から第1ドグ歯が第2ドグ歯に噛合するインギヤ位置にかけて可動リングを操作するドグ操作装置と、を備え、回転体は、外周面に軸方向に延在するガイド溝を有し、可動リングは、一端部が内周面に設けられた凹部に潤滑油を介して回転可能に挿入されるとともに、他端部がガイド溝に係合する略円柱形状のガイドピンを有する。
本発明によれば、回転体のガイド溝に係合する略円柱形状のガイドピンの一端部を、可動リングの凹部に潤滑油を介して回転可能に挿入するので、可動リングの軸方向の移動時に、ガイドピンの一端部が凹部内を摺動しながら回転し、他端部がガイド溝に沿って転動する。このため、簡易な構成によりガイドピンに発生する応力を低減することができ、ガイドピンの破損を防止することができる。
以下、図1〜図8を参照して本発明の実施形態について説明する。図1は、本発明の実施形態に係る変速機の要部構成を示すスケルトン図である。この変速機1は、例えばハイブリッド車両に搭載される。ハイブリッド車両は、エンジン2と電動機3とを備える。
変速機1は、エンジン2および電動機3の少なくとも一方の回転を速度段に応じた変速比で変速するギヤ機構10と、エンジン2のトルクをギヤ機構10に伝達または非伝達するクラッチ機構Cとを有する。ギヤ機構10を介して出力されたトルクは、図示しない差動ギヤ機構、駆動軸等を介して駆動輪に伝達され、これにより車両が走行する。
ギヤ機構10は、互いに略平行に配置され、それぞれが回転可能に支持された複数の回転軸、すなわち第1主入力軸11と第2主入力軸12と副入力軸13と出力軸14とリバース軸15とを有する。第2主入力軸12は、第1主入力軸11と同軸上にかつ第1主入力軸11を包囲するように中空に形成される。変速機1は、例えば前進8速、後進1速の自動変速機である。クラッチ機構Cは、乾式クラッチにより構成された第1クラッチC1と第2クラッチC2とを有する。なお、乾式クラッチに代えて湿式クラッチ(例えば湿式多板クラッチ)を用いることもできる。
電動機3は、例えば3相のDCブラシレスモータにより構成され、図示しない電動機3のハウジング内に回転可能に支持されたロータ3aと、ロータ3aの周囲に配置され、ハウジングに固定されたステータ3bとを有する。第1主入力軸11の一端部は、電動機3のロータ3aに接続され、第1主入力軸11はロータ3aと一体に回転可能である。
第1主入力軸11の他端部は、第1クラッチC1を介してエンジン2の出力軸2aに接続され、第1クラッチC1の断接に応じて第1主入力軸11と出力軸2aとが結合または遮断される。すなわち、第1クラッチC1が接続すると、第1主入力軸11と出力軸2aとが結合され、第1主入力軸11にエンジン2からのトルクを入力可能となる。一方、第1クラッチC1が遮断すると、第1主入力軸11と出力軸2aとが遮断され、エンジン2からのトルク入力が不能となる。
さらに第1主入力軸の11の他端部は、第2クラッチC2を介して第2主入力軸12の一端部に接続され、第2クラッチC2の断接に応じて第1主入力軸11と第2主入力軸12とが結合または遮断される。すなわち、第2クラッチC2が接続すると、第1主入力軸11と第2主入力軸12とが結合され、第2クラッチC2が遮断すると、第1主入力軸11と第2主入力軸12とが遮断される。例えば第1クラッチC1と第2クラッチC2の双方が接続すると、第2主入力軸12にエンジン2からのトルクが入力可能となる。第2クラッチC2のみが接続されると、第2主入力軸12に電動機3のトルクが入力可能となる。
なお、本実施形態の変速機1のクラッチ機構Cは、一対のクラッチC1,C2を有するが、これは入力軸11,12とエンジン2および電動機3との接続を切り換えるためのものである。したがって、クラッチ機構Cは、エンジン2とギヤ機構10または電動機3とギヤ機構10を断接するシングルクラッチと同様の機能を有し、奇数変速段用のクラッチと偶数変速段用のクラッチとそれぞれ有するデュアルクラッチ(ツインクラッチ)とは構成が異なる。
第2主入力軸12の周囲には、2速駆動ギヤ22と、8速駆動ギヤ28と、4速駆動ギヤ24と、7速駆動ギヤ27とが、電動機3側からこの順番に配設される。これら駆動ギヤ22,24,27,28は、それぞれ不図示のベアリングを介し第2主入力軸12に対して相対回転可能に支持される。第2主入力軸12には、7速駆動ギヤ27の側方(クラッチ機構C側)にギヤ31が固定される。ギヤ31は、リバース軸15に固定されたギヤ32に噛合する。リバース軸15の周囲には、リバース駆動ギヤ29とパーキングギヤ30とがリバース軸15に対し相対回転可能に支持される。
なお、本明細書において、回転軸(第2主入力軸12、出力軸14、リバース軸15など)にギヤが固定されるとは、回転軸の外周面にギヤを加工する場合や、回転軸と別体のギヤをスプライン結合等により回転軸に支持する場合、すなわち回転軸に相対回転不能にギヤを設ける場合をいう。
図示は省略するが、ギヤ32は、副入力軸13に固定されたギヤ33に噛合する。これにより第2主入力軸12の回転がギヤ31〜33を介して副入力軸13に伝達され、副入力軸13は第2主入力軸12およびリバース軸15とともに回転する。副入力軸13の周囲には、1速駆動ギヤ21と、6速駆動ギヤ26と、3速駆動ギヤ23と、5速駆動ギヤ25とが、電動機3側からこの順番に配設される。これら駆動ギヤ21,23,25,26は、それぞれ不図示のベアリングを介し副入力軸13に対して相対回転可能に支持される。
出力軸14には、1−2速従動ギヤ41と、6−8速従動ギヤ42と、3−4速従動ギヤ43と、5−7速従動ギヤ44と、ファイナルギヤ45とが、電動機3側からこの順番に固定される。1−2速従動ギヤ41は、1速駆動ギヤ21と2速駆動ギヤ22とにそれぞれ噛合する。なお、図示は省略するが、1−2速従動ギヤ41はリバース駆動ギヤ33にも噛合する。6−8速従動ギヤ42は、6速駆動ギヤ26と8速駆動ギヤ28とにそれぞれ噛合する。3−4速従動ギヤ43は、3速駆動ギヤ23と4速駆動ギヤ24とにそれぞれ噛合する。5−7速従動ギヤ44は、5速駆動ギヤ25と7速駆動ギヤ27とにそれぞれ噛合する。
パーキングギヤ30は、図示しないパーキングギヤ機構の係合爪と噛合可能に構成される。パーキングギヤ機構の作動に応じてパーキングギヤ30に係合爪が係合すると、ギヤ機構10がロックされ、係合爪の係合が解除されると、ギヤ機構10がアンロックされる。変速機1のトルクは、ファイナルギヤ45を介して、図示しない差動ギヤ機構に出力される。
変速機1は、ドグ歯を介して駆動ギヤ21〜29をトルク伝達用の回転軸に結合する複数のギヤ結合機構(ドグクラッチ)を有する。すなわち、2速駆動ギヤ22または8速駆動ギヤ28を第2主入力軸12に結合する第1ギヤ結合機構1GEと、4速駆動ギヤ24または7速駆動ギヤ27を第2主入力軸12に結合する第2ギヤ結合機構2GEと、1速駆動ギヤ21または6速駆動ギヤ26を副入力軸13に結合する第3ギヤ結合機構3GEと、3速駆動ギヤ23または5速駆動ギヤ25を副入力軸13に結合する第4ギヤ結合機構4GEと、リバース駆動ギヤ29をリバース軸15に結合する第5ギヤ結合機構5GEとを有する。
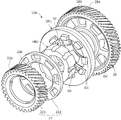
図2は、第1ギヤ結合機構1GEの構成を示す分解斜視図であり、図3は、第1ギヤ結合機構1GEの組立て状態を示す変速機1の要部断面図である。図2,3に示すように、第1ギヤ結合機構1GEは、2速駆動ギヤ22と8速駆動ギヤ28との間に配置され、第2主入力軸12に固定されて、軸線CL0を中心に回転するハブHB1と、ハブHB1の外周面に沿って軸方向(図3の矢印AB方向)に移動可能に支持された可動リングDR1とを有する。
より具体的には、可動リングDR1の内周面には、径方向内側に向けて周方向複数の略円柱形状のガイドピン50が突設され、各ガイドピン50に対応してハブHB1の外周面には、軸方向一端面から他端面にかけて周方向複数の略V字状のガイド溝60が設けられる。ガイドピン50はガイド溝60に係合し、ガイドピン50はガイド溝60にガイドされながら可動リングDR1と一体に軸方向(図3の矢印AB方向)に移動する。可動リングDR1の軸方向一端面には、周方向等間隔にドグ歯D1が突設され、軸方向他端面には、周方向等間隔にドグ歯D2が突設される。
2速駆動ギヤ22は、外周面に形成された変速ギヤ22aと、ドグ歯D1に対向して軸方向端部に設けられたドグ歯D3とを有する。より具体的には、2速駆動ギヤ22は、外周面に変速ギヤ22aが形成されたギヤ本体221と、ギヤ本体221の可動リングDR1側の端部にスプライン結合により取り付けられた噛合リング222とを一体に有する。噛合リング222には、可動リングDR1のドグ歯D1に対応して周方向複数の開口部22bが設けられ、2速駆動ギヤ22(噛合リング222)の軸方向端面は周方向に凹凸状に形成される。これにより2速駆動ギヤ22の軸方向端部に、ドグ歯D1に対向してドグ歯D3が設けられる。
8速駆動ギヤ28は、外周面に形成された変速ギヤ28aと、ドグ歯D2に対向して軸方向端部に設けられたドグ歯D4とを有する。より具体的には、8速駆動ギヤ28には、可動リングDR1のドグ歯D2に対応して周方向複数の開口部28bが設けられ、8速駆動ギヤ28の軸方向端面は周方向に凹凸状に形成される。これにより8速駆動ギヤ28の軸方向端部に、ドグ歯D2に対向してドグ歯D4が設けられる。
図3では、可動リングDR1のドグ歯D1,D2が2速駆動ギヤ22および8速駆動ギヤ28のいずれのドグ歯D3,D4にも噛合しておらず、可動リングDR1は中立位置に位置し、第1ギヤ結合機構1GEは中立状態にある。この状態から可動リングDR1が矢印A方向のインギヤ位置に移動してドグ歯D1がドグ歯D3に噛合すると、2速駆動ギヤ22が第2主入力軸12に結合し、第1ギヤ結合機構1GEはギヤ結合状態となる。また、可動リングDR1が矢印B方向のインギヤ位置に移動してドグ歯D2がドグ歯D4に噛合すると、8速駆動ギヤ28が第2主入力軸12に結合し、第1ギヤ結合機構1GEはギヤ結合状態となる。
可動リングDR1は、ドグ操作装置40により中立位置からインギヤ位置またはインギヤ位置から中立位置に操作される。図示は省略するが、ドグ操作装置40は、可動リングDR1を駆動するアクチュエータ(電動モータなど)を有し、アクチュエータはコントローラからの制御信号により駆動制御される。例えばコントローラは、車速とアクセルペダルの踏み込み量とに基づき車両の要求トルクを算出し、要求トルクに応じた変速段となるようにアクチュエータを制御する。
図1において、第1ギヤ結合機構1GEを介して2速駆動ギヤ22が第2主入力軸12に結合すると、第2主入力軸12の回転が2速駆動ギヤ22、1−2速従動ギヤ41を介して出力軸14に伝達され、2速段が確立する。第1ギヤ結合機構1GEを介して8速駆動ギヤ28が第2主入力軸12に結合すると、第2主入力軸12の回転が8速駆動ギヤ28、6−8速従動ギヤ42を介して出力軸14に伝達され、8速段が確立する。
詳細な図示は省略するが、他のギヤ結合機構2GE〜5GEも第1ギヤ結合機構1GEと同様に構成される。
第2ギヤ結合機構2GEを介して4速駆動ギヤ24が第2主入力軸12に結合すると、第2主入力軸12の回転が4速駆動ギヤ24、3−4速従動ギヤ43を介して出力軸14に伝達され、4速段が確立する。第2ギヤ結合機構2GEを介して7速駆動ギヤ27が第2主入力軸12に結合すると、第2主入力軸12の回転が7速駆動ギヤ27、5−7速従動ギヤ44を介して出力軸14に伝達され、7速段が確立する。
第3ギヤ結合機構3GEを介して1速駆動ギヤ21が副入力軸13に結合すると、副入力軸13の回転が1速駆動ギヤ21、1−2速従動ギヤ41を介して出力軸14に伝達され、1速段が確立する。第3ギヤ結合機構3GEを介して6速駆動ギヤ26が副入力軸13に結合すると、副入力軸13の回転が6速駆動ギヤ26、6−8速従動ギヤ42を介して出力軸14に伝達され、6速段が確立する。
第4ギヤ結合機構4GEを介して3速駆動ギヤ23が副入力軸13に結合すると、副入力軸13の回転が3速駆動ギヤ23、3−4速従動ギヤ43を介して出力軸14に伝達され、3速段が確立する。第4ギヤ結合機構4GEを介して5速駆動ギヤ25が副入力軸13に結合すると、副入力軸13の回転が5速駆動ギヤ25、5−7速従動ギヤ44を介して出力軸14に伝達され、5速段が確立する。
第5ギヤ結合機構5GEを介してリバース駆動ギヤ29がリバース軸15に結合すると、リバース軸15の回転がリバース駆動ギヤ29、1−2速従動ギヤ41を介して出力軸14に伝達され、後進段が確立する。なお、図示は省略するが、可動リングDR5が軸方向の所定位置に移動すると、パーキングギヤ機構が作動し、パーキングギヤ機構の係合爪がパーキングギヤ30に係合してギヤ機構10がロックされる。
上述したように、本実施形態では、ギヤ結合機構1GE〜5GEのハブHB1〜HB5と可動リングDR1〜DR5とは、それぞれガイド溝60に係合されたガイドピン50を介してトルク伝達可能に連結される(図2,3)。以下、この点について詳細に説明する。
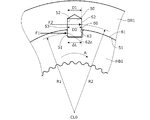
図4は、図3のIV-IV線に沿って切断した第1ギヤ結合機構1GEのハブHB1と可動リングDR1の要部構成を拡大して示す断面図であり、図5は、中立状態におけるガイド溝60とガイドピン50との間の位置関係を示す図である。なお、図示は省略するが、他のギヤ結合機構2GE〜5GEのガイド溝60とガイドピン50の構成も図4,5に示したものと同一である。
図4に示すように、可動リングDR1の内周面51には円形の有底孔52が設けられ、有底孔52に円柱形状のガイドピン50の一端部が挿入される。有底孔52の直径D1はガイドピン50の直径D0よりも所定長さΔdだけ大きく、有底孔52とガイドピン50との間の隙間53に潤滑油が充填される。このようにガイドピン50を有底孔52に圧入するのではなく、所定長さΔdの隙間53を設けて有底孔52に挿入することで、ガイドピン50は有底孔52から脱落することなく、潤滑油の表面張力により有底孔52に回転可能に保持される。なお、所定長さΔdは、隙間53に潤滑油膜を形成し得る値、例えば数百μm程度に設定される。
図5には、車両の前進走行時および後進走行時におけるハブHB1の回転方向をそれぞれ矢印FおよびRで示すとともに、軸方向に沿った可動リングDR1の移動方向を図3と同様、矢印ABで示す。図5に示すように、ハブHB1の外周面61のガイド溝60は、互いに対向する一対の側面62、すなわち矢印R方向側の側面62aと、矢印F方向側の側面62bとを有する。
ガイド溝60は、ハブHB1の軸方向(AB方向)の全長にわたって一方の側面62aから他方の側面62bまでの長さ(溝幅L1)が一定となり、かつ、ハブHB1の軸方向長さL0の中間を通る軸線CL1に対して対称に形成される。軸線CL1の両側の一対の側面62bのなす角θは180°より小さい。溝幅L1は、ガイドピン50の直径D0よりも大きく、さらに有底孔52の直径D1よりも大きい(図4参照)。したがって、ガイド溝60とガイドピン50との間には、隙間53よりも大きな隙間63が形成される。
図4に示すように、ハブHB1が矢印A方向に回転すると、可動リングDR1にガイドピン50を介してトルクが作用し、可動リングDR1がハブHB1とともに回転する。このとき、ガイド溝60の側面62aからガイドピン50に押圧力F1が作用し、ガイドピン50から有底孔52の周面に押圧力F2が作用する。なお、図4は、加速走行時の押圧力F1,F2の向きを示しており、減速走行時には可動リングDR1からハブHB1にトルクが作用するため、押圧力F1,F2の向きが反対となる。
押圧力F1,F2は、ガイドピン50とガイド溝60との接触面S1、およびガイドピン50と有底孔52との接触面S2にそれぞれ作用する。ハブHB1の回転中心である軸線CL0から接触面S1の径方向中間位置までの距離R1は、軸線CL0から接触面S2の径方向中間位置までの距離R2よりも短い(R1<R2)。このため、接触面S1,S2に作用するトルクは互いに等しい(R1・F1=R2・F2)ことから、押圧力F2は押圧力F1よりも小さい(F1>F2)。
したがって、接触面S1におけるガイドピン50とガイド溝60との摩擦係数μ1と、接触面S2におけるガイドピン50と有底孔52との摩擦係数μ2とを、互いに等しいと仮定すると、接触面S1における摩擦力(μ1・F1)は接触面S2における摩擦力(μ2・F2)よりも大きい。これにより、ガイドピン50がガイド溝60に沿って図5の矢印AB方向に移動する場合、摩擦力が大きい接触面S1でガイドピン50の一端部は転がりやすく、摩擦力が小さい接触面S2でガイドピン50の他端部は摺動しやすい。
以上より、ガイドピン50の一端部は、ガイド溝60の側面62を滑らずに転がりながらガイド溝60に沿って移動し、ガイドピン50の外周面の全周が順次接触面S1となる。これにより、ガイドピン50を転がらせずに摺動させる場合に比べ、ガイドピン50の一端部の応力を低減することができる。このとき、ガイドピン50の他端部は、有底孔52内を摺動しながら回転する。このため、ガイドピン50は流体潤滑状態となって、潤滑油を介して有底孔52の周面に接触する。その結果、ガイドピン50の摺動性が向上し、ガイドピン50の他端部の応力も低減することができる。
図6,7は、それぞれドグ操作装置40の操作により第1ギヤ結合機構1GEの可動リングDR1を矢印A方向に移動させた状態、すなわち2速段での加速走行時および減速走行時におけるトルクの伝達経路を示す図である。なお、図示は省略するが、他の変速段におけるトルクの伝達径路も図6,7と同様である。
加速走行時には、ハブHB1の回転が可動リングDR1の回転よりも速い。このため、図6に示すように、ハブHB1のガイド溝60の側面62aがガイドピン50に当接する。これにより、当接部50aにおいてガイドピン50に加速方向(矢印F方向)の押圧力F1が作用し、この押圧力F1により2速駆動ギヤ22(ドグ歯D2b)に加速トルクTaが作用する。このとき、ガイド溝60の側面62aが軸方向に対し傾斜していることから、ガイドピン50には押圧力F1に垂直な矢印A方向への力Fa、すなわち2速駆動ギヤ22と可動リングDR1との噛合わせを促進するような力(噛合い促進力)が作用する。
一方、減速走行時には、ハブHB1の回転が可動リングDR1の回転よりも遅く、図7に示すように、2速駆動ギヤ22から可動リングDR1に減速トルクTbが作用する。このため、ハブHB1のガイド溝60の側面62bがガイドピン50に当接し、当接部50bにおいてガイドピン50に減速方向(矢印R方向)の押圧力F3が作用する。このとき、ガイド溝60の側面62bが軸方向に対し傾斜していることから、ガイドピン50には押圧力F3に垂直な矢印B方向への力Fb、すなわち2速駆動ギヤ22と可動リングDR1との噛合わせを解除するような力(噛合い解除力)が作用する。
本実施形態では、アップシフト時に下段ギヤと上段ギヤとが同時に噛み合うように、ドグ操作装置40が可動リングを操作する。例えば2速段から3速段へのアップシフト時には、第1ギヤ結合機構1GEを介して2速駆動ギヤ22が第2主入力軸12に結合された状態で、さらに第4ギヤ結合機構4GEを介して3速駆動ギヤ23が副入力軸13に結合される。
この場合には、第1ギヤ結合機構1GEのハブHB1の回転は可動リングDR1(2速駆動ギヤ22)の回転よりも遅い。一方、第4ギヤ結合機構4GEのハブHB4の回転は可動リングDR4(3速駆動ギヤ23)の回転よりも速い。このため、2速駆動ギヤ22は図7の減速状態となり、3速駆動ギヤ23は図6の加速状態となる。したがって、アップシフト時に2速駆動ギヤ22と3速駆動ギヤ23とがそれぞれ可動リングDR1,DR4に同時に噛合すると、2速駆動ギヤ22には、出力軸14を介して出力トルクの一部が循環トルクとして作用する。
この循環トルクによって第1ギヤ結合機構1GEのガイドピン50に噛合い解除力Fb(図7)が作用し、可動リングDR1が図7の矢印B方向(噛合い解除方向)に移動する。これにより、可動リングDR1のドグ歯D2aと2速駆動ギヤ22のドグ歯D2bとの噛合いが解除され、第1ギヤ結合機構1GEは中立状態となる。このとき、第4ギヤ結合機構4GEのガイドピン50には噛合い促進力Fa(図6)が作用し、可動リングDR4が3速駆動ギヤ23側に押圧される。これにより可動リングDR4のドグ歯D3aと3速駆動ギヤ23のドグ歯D3bとは噛合したままであり、第4ギヤ結合機構4GEはギヤ結合状態となる。
このように一部の駆動ギヤ(例えば2速駆動ギヤ22と3速駆動ギヤ23)を同時に噛合させながら変速することで、トルク抜けがなくスムーズなアップシフトが可能となる。なお、ダウンシフト時には、結合状態にある上段の変速段に対応したギヤ結合機構の可動リングを中立位置に戻した後に、下段の変速段に対応したギヤ結合機構をギヤ結合状態とするように、ドグ操作装置40が可動リングDR1〜DR5を操作する。
本発明の実施形態によれば以下のような作用効果を奏することができる。
(1)変速機1は、軸線CL0を中心に回転するハブHB1〜HB5と、ハブHB1〜HB5の周囲に、ハブHB1〜HB5に対し軸方向に相対移動可能かつハブHB1〜HB5と一体に回転可能に設けられ、ドグ歯D1,D2を有する可動リングDR1〜DR5と、ハブHB1〜HB5に対し相対回転可能に設けられ、ドグ歯D1,D2に対向したドグ歯D3,D4を有する駆動ギヤ21〜29と、ドグ歯D1,D2がドグ歯D3,D4から離間した中立位置からドグ歯D1,D2がドグ歯D3,D4に噛合するインギヤ位置にかけて可動リングDR1〜DR5を操作するドグ操作装置40と、を備える(図1,3)。ハブHB1〜HB5は、外周面61に軸方向に延在するガイド溝60を有し、可動リングDR1〜DR5は、一端部が内周面51に設けられた有底孔52に潤滑油を介して回転可能に挿入され、他端部がガイド溝60に係合する略円柱形状のガイドピン50を有する(図4,5)。
(1)変速機1は、軸線CL0を中心に回転するハブHB1〜HB5と、ハブHB1〜HB5の周囲に、ハブHB1〜HB5に対し軸方向に相対移動可能かつハブHB1〜HB5と一体に回転可能に設けられ、ドグ歯D1,D2を有する可動リングDR1〜DR5と、ハブHB1〜HB5に対し相対回転可能に設けられ、ドグ歯D1,D2に対向したドグ歯D3,D4を有する駆動ギヤ21〜29と、ドグ歯D1,D2がドグ歯D3,D4から離間した中立位置からドグ歯D1,D2がドグ歯D3,D4に噛合するインギヤ位置にかけて可動リングDR1〜DR5を操作するドグ操作装置40と、を備える(図1,3)。ハブHB1〜HB5は、外周面61に軸方向に延在するガイド溝60を有し、可動リングDR1〜DR5は、一端部が内周面51に設けられた有底孔52に潤滑油を介して回転可能に挿入され、他端部がガイド溝60に係合する略円柱形状のガイドピン50を有する(図4,5)。
このように可動リングDR1〜DR5の内周面51の有底孔52に潤滑油を介してガイドピン50を回転可能に挿入することにより、可動リングDR1〜DR5の軸方向の移動時には、ガイドピン50の一端部が有底孔52内を摺動しながら回転し、他端部がガイド溝60に沿って転動する。このため、例えばガイドピン50を可動リングDR1〜DR5の内周面51に回転不能に圧入してガイド溝60に沿って摺動させる場合に比べ、ガイドピン50に発生する応力を低減することができ、簡易な構成でガイドピン50の破損を防止することができる。なお、ガイドピン50の接触面S1におけるガイド溝60との摺動性を向上させるために、ガイドピン50の一端部にブッシュを取り付けることも考えられる。しかし、この場合には、部品点数が増加するだけでなく、押圧力F1(図4)によりブッシュが破損するおそれがある。
(2)ガイドピン50と有底孔52との間の隙間53は、潤滑油の表面張力により有底孔52に回転可能に保持されるように設定される(図4)。これにより潤滑油で満たされた有底孔52内にガイドピン50の端部を挿入するだけで、ガイドピン50を有底孔52内に容易に回転可能に保持することができる。
(3)ガイドピン50と有底孔52との間の隙間53は、ガイドピン50とガイド溝60との間の隙間63よりも小さい。換言すれば、有底孔52の直径D1は、ガイド溝60の溝幅L1よりも小さい(図4)。これによりガイドピン50はガイド溝60の一方の側面62aまたは62bのみに当接し、ガイドピン50が側面62上を容易に転動することができる。
(4)ガイド溝60は、軸方向に対し傾斜し、かつ、軸方向に対称な略V字形状を呈する(図5)。このようにガイド溝60を形成することで、例えばアップシフト時に下段の変速ギヤと上段の変速ギヤとを同時に噛合させた場合に、下段の変速ギヤに対応するいずれかのギヤ結合機構の可動リングDR1〜DR5を、出力軸14を介した循環トルクにより中立位置に移動させることができる。この場合、ガイドピン50には過大な噛合い解除力Fbが作用するが、上述したように可動リングDR1〜DR5の内周面51の有底孔52に潤滑油を介してガイドピン50を回転可能に挿入することで、ガイドピン50はガイド溝60の側面62上を転動し、ガイドピン50に発生する応力を低減することができる。
(5)可動リングDR1〜DR9は、回転軸(第2入力軸12、出力軸14、リバース軸15)と一体に回転するハブHB1〜HB5の周囲にハブHB1〜HB5に対し軸方向に相対移動可能かつハブHB1〜HB5と一体に回転可能に設けられ、ガイド溝60は、ハブHB1〜HB5の外周面61に設けられる(図4,5)。このようにハブHB1〜HB5を介して可動リングDR1〜DR9を支持することで、可動リングDR1〜DR5を、回転軸に対し軸方向に相対移動可能かつ回転軸と一体に回転可能に容易に構成できる。
なお、上記実施形態では、変速機1のギヤ機構10にクラッチ機構Cを介してエンジン2と電動機3とを接続するようにしたが、例えば電動機3を省略してもよく、変速機1の構成は上述したものに限らない。図8は、図1の変形例を示す図である。図8の変速機1Aでは、電動機3が省略され、エンジン2のトルクが単一のクラッチCを介して入力軸12Aに入力される。入力軸12Aの周囲には、5速駆動ギヤ25Aと2速駆動ギヤ22Aと6速駆動ギヤ26Aと3速駆動ギヤ23Aとがこの順番に、それぞれ入力軸12Aに対し相対回転可能に配置され、さらに3速駆動ギヤ23Aの側方にギヤ34,35が入力軸12Aに固定して配置される。
出力軸14Aには、5速駆動ギヤ25Aに噛合するギヤ46と、2速駆動ギヤ22Aに噛合するギヤ47と、6速駆動ギヤ26Aに噛合するギヤ48と、3速駆動ギヤ23Aに噛合するギヤ49と、ファイナルギヤ45Aとが固定される。出力軸14Aの周囲には、ギヤ49とファイナルギヤ45との間に、4速駆動ギヤ24Aと1速駆動ギヤ21Aとがそれぞれ出力軸14Aに対し相対回転可能に配置され、4速駆動ギヤ24Aと1速駆動ギヤ21Aとはそれぞれギヤ34,35に噛合される。なお、図8では、リバース駆動ギヤの図示を省略する。
2速駆動ギヤ22Aと6速駆動ギヤ26Aとの間にはギヤ結合機構6GEが設けられ、3速駆動ギヤ23Aと6速駆動ギヤ26Aとの間にはギヤ結合機構7GEが設けられ、1速駆動ギヤ21Aと4速駆動ギヤ24Aとの間にはギヤ結合機構8GEが設けられる。ギヤ結合機構は、上述した第1ギヤ結合機構〜第5ギヤ結合機構と同様に構成され、それぞれが回転軸(入力軸12A,出力軸21A)に固定されたハブと、ハブの外周面に沿って軸方向に相対移動可能な可動リングとを有する。2速駆動ギヤ22Aおよび5速駆動ギヤ25Aの一方はギヤ結合機構6GEを介して入力軸12Aに結合可能であり、3速駆動ギヤ23Aおよび6速駆動ギヤ26Aの一方はギヤ結合機構7GEを介して入力軸12Aに結合可能であり、1速駆動ギヤ21Aおよび4速駆動ギヤ24Aの一方はギヤ結合機構8GEを介して出力軸14Aに結合可能である。これにより1〜6速のいずれかの変速段が確立される。
上記実施形態では、回転体としての回転軸12,13,15とハブHB1〜HB5とを別体として構成したが、回転軸12,13,15の外周面の一部を例えばハブHB1〜HB5と同一形状に構成し、回転軸自体にガイド溝60を設けるようにしてもよい。したがって、周囲に可動リングDR1〜DR5を有する回転体は回転軸であってもよく、ハブを省略してもよい。上記実施形態では、軸方向に移動可能な可動リングDR1〜DR5の軸方向の端面に第1ドグ歯としてドグ歯D1,D2を突設するようにしたが、第1ドグ歯の構成はこれに限らない。したがって、回転軸に対し相対回転可能に設けられ、可動リングDR1〜DR5のドグ歯D1,D2に対応した駆動ギヤ21〜29(変速用ギヤ)のドグ歯D3,D4の構成、すなわち第2ドグ歯の構成も上述したものに限らない。すなわち、ドグクラッチの構成は上述したものに限らず、例えば可動リングの内周面と変速用ギヤの外周面とを互いに対向するように構成し、これら内周面と外周面とにそれぞれ第1ドグ歯と第2ドグ歯とを形成してもよい。
上記実施形態では、変速用ギヤとして前進8速段、後進1速段の駆動ギヤ21〜29を設けたが、変速用ギヤの段数はこれに限らない。変速機1を自動変速機ではなく、手動変速機としてもよい。中立位置からインギヤ位置にかけて可動リングDR1〜DR5を操作するであれば、ドグ操作装置40はいかなるものでもよく、例えばドライバ自身がドグ操作装置40に目標変速段を入力し、目標変速段に応じて可動リングDR1〜DR5を操作するようにしてもよい。
上記実施形態では、軸方向に延在するガイド溝として、ハブHB1〜HB5の外周面にV字状のガイド溝60を形成したが、ガイド溝の形状はこれに限らず、例えばストレート状のガイド溝であってもよい。上記実施形態では、可動リングDR1〜DR5の内周面51の有底孔52に潤滑油を介して略円柱形状のガイドピン50を回転可能に挿入したが、ガイドピンが挿入される凹部の構成はこれに限らない。上記実施形態では、有底孔52の直径D1をガイド溝60の溝幅L1よりも小さくしたが、D1とL1の大小関係はこれに限らない。
以上の説明はあくまで一例であり、本発明の特徴を損なわない限り、上述した実施形態および変形例により本発明が限定されるものではない。上記実施形態と変形例の1つまたは複数を任意に組み合わせることも可能である。変形例同士を組み合わせることもできる。
1,1A 変速機、12 第2主入力軸、13 副入力軸、21〜29 駆動ギヤ、40 ドグ操作装置、50 ガイドピン、52 有底孔、53 隙間、60 ガイド溝、63 隙間、1GE〜8GE ギヤ結合機構、D1〜D4 ドグ歯、DR1〜DR5 可動リング、HB1〜HB5 ハブ
Claims (5)
- 軸線を中心に回転する回転体と、
前記回転体の周囲に、前記回転体に対し軸方向に相対移動可能かつ前記回転体と一体に回転可能に設けられ、第1ドグ歯を有する可動リングと、
前記回転体に対し相対回転可能に設けられ、前記第1ドグ歯に対向した第2ドグ歯を有する変速用ギヤと、
前記第1ドグ歯が前記第2ドグ歯から離間した中立位置から前記第1ドグ歯が前記第2ドグ歯に噛合するインギヤ位置にかけて前記可動リングを操作するドグ操作装置と、を備え、
前記回転体は、外周面に軸方向に延在するガイド溝を有し、
前記可動リングは、一端部が内周面に設けられた凹部に潤滑油を介して回転可能に挿入されるとともに、他端部が前記ガイド溝に係合する略円柱形状のガイドピンを有することを特徴とする変速機。 - 請求項1に記載の変速機において、
前記ガイドピンと前記凹部との間の隙間は、前記潤滑油の表面張力により前記凹部に回転可能に保持されるように設定されることを特徴とする変速機。 - 請求項1または2に記載の変速機において、
前記ガイドピンと前記凹部との間の隙間は、前記ガイドピンと前記ガイド溝との間の隙間よりも小さいことを特徴とする変速機。 - 請求項1〜3のいずれか1項に記載の変速機において、
前記ガイド溝は、軸方向に対し傾斜し、かつ、軸方向に対称な略V字形状を呈することを特徴とする変速機。 - 請求項1〜4のいずれか1項に記載の変速機において、
前記回転体は、回転軸と一体に回転するハブであり、
前記可動リングは、前記ハブの周囲に前記ハブに対し軸方向に相対移動可能かつ前記ハブと一体に回転可能に設けられ、
前記ガイド溝は、前記ハブの外周面に設けられることを特徴とする変速機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101491A JP2017207181A (ja) | 2016-05-20 | 2016-05-20 | 変速機 |
| CN201710212451.5A CN107401584B (zh) | 2016-05-20 | 2017-04-01 | 变速器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101491A JP2017207181A (ja) | 2016-05-20 | 2016-05-20 | 変速機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017207181A true JP2017207181A (ja) | 2017-11-24 |
Family
ID=60404340
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016101491A Pending JP2017207181A (ja) | 2016-05-20 | 2016-05-20 | 変速機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017207181A (ja) |
| CN (1) | CN107401584B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117145938A (zh) * | 2023-10-26 | 2023-12-01 | 特百佳动力科技股份有限公司 | 一种混合动力变速箱及单电机混合动力系统 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56127841A (en) * | 1980-02-18 | 1981-10-06 | Automotive Prod Co Ltd | Transmission |
| JP5707119B2 (ja) * | 2010-12-17 | 2015-04-22 | 株式会社イケヤフォ−ミュラ | トランスミッション |
| CN203627586U (zh) * | 2013-10-28 | 2014-06-04 | 长城汽车股份有限公司 | 同步器 |
| JP2015140892A (ja) * | 2014-01-30 | 2015-08-03 | 株式会社イケヤフォ−ミュラ | トランスミッション |
| CN204061754U (zh) * | 2014-07-30 | 2014-12-31 | 任丕 | 三挡两轴换挡变速机构 |
| JP6416568B2 (ja) * | 2014-09-19 | 2018-10-31 | 株式会社イケヤフォ−ミュラ | トランスミッション |
-
2016
- 2016-05-20 JP JP2016101491A patent/JP2017207181A/ja active Pending
-
2017
- 2017-04-01 CN CN201710212451.5A patent/CN107401584B/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117145938A (zh) * | 2023-10-26 | 2023-12-01 | 特百佳动力科技股份有限公司 | 一种混合动力变速箱及单电机混合动力系统 |
| CN117145938B (zh) * | 2023-10-26 | 2024-03-19 | 特百佳动力科技股份有限公司 | 一种混合动力变速箱及单电机混合动力系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107401584A (zh) | 2017-11-28 |
| CN107401584B (zh) | 2020-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5368253B2 (ja) | ツインクラッチ式の変速装置およびそれを備えた車両 | |
| JP5155910B2 (ja) | 大型車両用ツインクラッチ式変速機 | |
| US7735389B2 (en) | Double clutch transmission | |
| CN101970901B (zh) | 车辆用双离合器式变速器 | |
| JP5264415B2 (ja) | ツインクラッチ式の変速装置、それを備えた車両及び自動二輪車 | |
| CN107407378B (zh) | 具有花键的双中间轴变速器 | |
| JP5698288B2 (ja) | 自動変速機 | |
| CN102918300B (zh) | 用于机动车辆的多离合变速器 | |
| JP5368083B2 (ja) | シフト機構及びこれを備える車両 | |
| CN107131260A (zh) | 自动变速器和自动变速器的控制方法 | |
| JP2013019424A (ja) | 車両の変速装置 | |
| JP2014031857A (ja) | 多軸変速機 | |
| JP5276272B2 (ja) | 産業車両用変速機 | |
| JP5329477B2 (ja) | 変速機 | |
| JP5658068B2 (ja) | 変速装置 | |
| JP3731456B2 (ja) | 変速機 | |
| JP6699353B2 (ja) | 変速機 | |
| CN107401584B (zh) | 变速器 | |
| CN107435688B (zh) | 牙嵌式离合器装置 | |
| JP2007139071A (ja) | 変速装置およびこれを備えるツインクラッチ式変速機 | |
| JP6363394B2 (ja) | 車両用無段変速装置 | |
| CN105849442B (zh) | 变速器的同步装置 | |
| JP2007296869A (ja) | ハイブリッド車両用駆動装置 | |
| JP5658069B2 (ja) | 変速装置 | |
| JP2015081650A (ja) | 自動変速機 |