JP2017207182A - 電動アクチュエータ - Google Patents
電動アクチュエータ Download PDFInfo
- Publication number
- JP2017207182A JP2017207182A JP2016101546A JP2016101546A JP2017207182A JP 2017207182 A JP2017207182 A JP 2017207182A JP 2016101546 A JP2016101546 A JP 2016101546A JP 2016101546 A JP2016101546 A JP 2016101546A JP 2017207182 A JP2017207182 A JP 2017207182A
- Authority
- JP
- Japan
- Prior art keywords
- ball screw
- electric actuator
- guide member
- casing
- screw shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 25
- 238000005096 rolling process Methods 0.000 claims abstract description 23
- 238000006243 chemical reaction Methods 0.000 claims abstract description 18
- 230000007246 mechanism Effects 0.000 claims abstract description 18
- 230000002093 peripheral effect Effects 0.000 claims description 25
- 238000004519 manufacturing process Methods 0.000 abstract description 8
- 238000001514 detection method Methods 0.000 description 15
- 230000002265 prevention Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000005496 tempering Methods 0.000 description 2
- 229910001209 Low-carbon steel Inorganic materials 0.000 description 1
- 229910000861 Mg alloy Inorganic materials 0.000 description 1
- 229910001297 Zn alloy Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000010791 quenching Methods 0.000 description 1
- 230000000171 quenching effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/22—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members
- F16H25/2204—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members with balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/06—Means for converting reciprocating motion into rotary motion or vice versa
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H2025/204—Axial sliding means, i.e. for rotary support and axial guiding of nut or screw shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H2025/2062—Arrangements for driving the actuator
- F16H2025/2075—Coaxial drive motors
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Rolling Contact Bearings (AREA)
Abstract
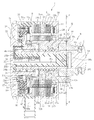
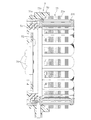
【解決手段】モータ部Aと運動変換機構部Bと操作部Cとターミナル部Dを備えた電動アクチュエータ1であって、モータ部Aのロータコア24aを支持する中空回転軸26が転がり軸受27、30によって回転自在に支持され、運動変換機構部Bが中空回転軸26に連結されると共にボールねじ31を備え、ボールねじナット32が中空回転軸26の内部に配置され、操作部Cが運動変換機構部Bに連結される。ボールねじ軸33と回り止めガイド部Nが凹凸嵌合され、ボールねじ軸が回り止めガイド部Nの軸方向幅に基づくストローク量で案内され、回り止めガイド部Nがケーシング20とは別体の回り止めガイド部材10により形成され、回り止めガイド部材の付け替えを可能にする連結構造Qを有する。
【選択図】図1
Description
10 回り止めガイド部材
10a 案内溝
12 環状溝
12a 内周面
12b 外周面
12c 底面
13 ピン
20 ケーシング
20a 円筒部
23 ステータ
23a ステータコア
23b ボビン
23c コイル
24 ロータ
24a ロータコア
24b 永久磁石
25 モータ
26 ロータインナ(中空回転軸)
27 転がり軸受
27a 内側軌道面
27b 外輪
28 軸受ホルダ
29 カバー
30 転がり軸受
31 ボールねじ
32 ボールねじナット
32a 螺旋状溝
32b ボールねじナット外周面
33 ボールねじ軸
33a 螺旋状溝
34 ボール
35 こま
36 ばね取付カラー
37 ピン
38 ガイドカラー
39 アクチュエータヘッド
47 スラスト針状ころ軸受
48 圧縮コイルばね
50 ターミナル本体
51 バスバー
52 プリント基板
53 回転角度検出用センサ
54 パルサリング
55 ストローク検出用センサ
56 プリント基板
57 永久磁石
A モータ部
B 運動変換機構部
C 操作部
D ターミナル部
L 筐体の軸方向寸法
M 筐体の径方向寸法
N 回り止めガイド部
Q 連結構造
Claims (6)
- モータ部と運動変換機構部と操作部とターミナル部を備えた電動アクチュエータであって、前記モータ部のロータコアを支持する中空回転軸が転がり軸受によって回転自在に支持され、前記運動変換機構部が前記中空回転軸に連結されると共にボールねじを備え、このボールねじのボールねじナットが前記中空回転軸の内部に配置され、前記操作部が前記運動変換機構部に連結された電動アクチュエータにおいて、
前記ボールねじ軸と回り止めガイド部が凹凸嵌合され、前記ボールねじ軸が前記回り止めガイド部の軸方向幅に基づくストローク量で案内され、
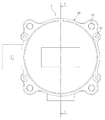
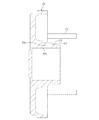
前記回り止めガイド部が前記電動アクチュエータのケーシングとは別体の回り止めガイド部材により形成され、
前記ケーシングの前記操作部側の端部と前記回り止めガイド部材が、当該回り止めガイド部材の付け替えを可能にする連結構造を有することを特徴とする電動アクチュエータ。 - 前記付け替えられる回り止めガイド部材のストローク量が異なることを特徴とする請求項1に記載の電動アクチュエータ。
- 前記ボールねじ軸と回り止めガイド部が凹凸嵌合される構成が、前記回り止めガイド部材の内周部に設けられた案内溝と、この案内溝に嵌め込まれる前記ボールねじ軸に設けられた係止部材であることを特徴とする請求項1に記載の電動アクチュエータ。
- 前記係止部材が、前記ボールねじ軸に設けられたピンと、このピンに外嵌されたガイドカラーとで構成されていることを特徴とする請求項3に記載の電動アクチュエータ。
- 前記回り止めガイド部材と前記ケーシングの連結構造が、少なくとも1個所の固定手段を有し、前記ケーシングに対する前記回り止めガイド部材の相対回転が防止されていることを特徴とする請求項1に記載の電動アクチュエータ。
- 前記固定手段が、前記回り止めガイド部材に設けられた貫通孔と、前記ケーシングに設けられたキー溝と、前記貫通孔とキー溝に挿入されるピンからなることを特徴とする請求項5に記載の電動アクチュエータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101546A JP2017207182A (ja) | 2016-05-20 | 2016-05-20 | 電動アクチュエータ |
| PCT/JP2017/017103 WO2017199741A1 (ja) | 2016-05-20 | 2017-04-28 | 電動アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016101546A JP2017207182A (ja) | 2016-05-20 | 2016-05-20 | 電動アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017207182A true JP2017207182A (ja) | 2017-11-24 |
Family
ID=60325069
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016101546A Pending JP2017207182A (ja) | 2016-05-20 | 2016-05-20 | 電動アクチュエータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017207182A (ja) |
| WO (1) | WO2017199741A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200012518A (ko) * | 2018-07-27 | 2020-02-05 | 주식회사 만도 | 스티어 바이 와이어식 조향장치 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113182912B (zh) * | 2021-04-28 | 2024-11-19 | 无锡君帆科技有限公司 | 一种利用滚珠丝杆进行传动的打刀器 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS568928U (ja) * | 1979-06-30 | 1981-01-26 | ||
| JPS609342A (ja) * | 1983-06-29 | 1985-01-18 | Shinichi Watanabe | 直線運動軸を持つモ−タ− |
| JPH11287272A (ja) * | 1998-03-31 | 1999-10-19 | Tokico Ltd | ディスクブレーキ |
| JP2000220715A (ja) * | 1999-01-29 | 2000-08-08 | Oriental Motor Co Ltd | リニアアクチュエータ |
| JP2005261029A (ja) * | 2004-03-10 | 2005-09-22 | Nsk Ltd | 電動アクチュエータ |
| JP2005282787A (ja) * | 2004-03-30 | 2005-10-13 | Thk Co Ltd | アクチュエータ |
| JP2007040467A (ja) * | 2005-08-04 | 2007-02-15 | Nissin Kogyo Co Ltd | 車両用ディスクブレーキ |
| JP4695723B2 (ja) * | 2008-04-09 | 2011-06-08 | 篤男 高村 | シリンダ装置 |
| JP2014018007A (ja) * | 2012-07-10 | 2014-01-30 | Nsk Ltd | 電動アクチュエータ |
| JP2014088919A (ja) * | 2012-10-30 | 2014-05-15 | Ntn Corp | 電動リニアアクチュエータ |
| JP2016065605A (ja) * | 2014-09-25 | 2016-04-28 | セイコークロック株式会社 | 直線駆動装置及び施錠装置 |
-
2016
- 2016-05-20 JP JP2016101546A patent/JP2017207182A/ja active Pending
-
2017
- 2017-04-28 WO PCT/JP2017/017103 patent/WO2017199741A1/ja not_active Ceased
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS568928U (ja) * | 1979-06-30 | 1981-01-26 | ||
| JPS609342A (ja) * | 1983-06-29 | 1985-01-18 | Shinichi Watanabe | 直線運動軸を持つモ−タ− |
| JPH11287272A (ja) * | 1998-03-31 | 1999-10-19 | Tokico Ltd | ディスクブレーキ |
| JP2000220715A (ja) * | 1999-01-29 | 2000-08-08 | Oriental Motor Co Ltd | リニアアクチュエータ |
| JP2005261029A (ja) * | 2004-03-10 | 2005-09-22 | Nsk Ltd | 電動アクチュエータ |
| JP2005282787A (ja) * | 2004-03-30 | 2005-10-13 | Thk Co Ltd | アクチュエータ |
| JP2007040467A (ja) * | 2005-08-04 | 2007-02-15 | Nissin Kogyo Co Ltd | 車両用ディスクブレーキ |
| JP4695723B2 (ja) * | 2008-04-09 | 2011-06-08 | 篤男 高村 | シリンダ装置 |
| JP2014018007A (ja) * | 2012-07-10 | 2014-01-30 | Nsk Ltd | 電動アクチュエータ |
| JP2014088919A (ja) * | 2012-10-30 | 2014-05-15 | Ntn Corp | 電動リニアアクチュエータ |
| JP2016065605A (ja) * | 2014-09-25 | 2016-04-28 | セイコークロック株式会社 | 直線駆動装置及び施錠装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200012518A (ko) * | 2018-07-27 | 2020-02-05 | 주식회사 만도 | 스티어 바이 와이어식 조향장치 |
| KR102086428B1 (ko) * | 2018-07-27 | 2020-03-09 | 주식회사 만도 | 스티어 바이 와이어식 조향장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017199741A1 (ja) | 2017-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6765193B2 (ja) | 電動アクチュエータ | |
| JP6647900B2 (ja) | 電動アクチュエータ | |
| JP6632909B2 (ja) | 電動アクチュエータ | |
| JP6794121B2 (ja) | 電動アクチュエータ | |
| WO2017163908A1 (ja) | 電動アクチュエータ | |
| JP6682316B2 (ja) | 電動アクチュエータ | |
| JP6671209B2 (ja) | 電動アクチュエータ | |
| JP2017207182A (ja) | 電動アクチュエータ | |
| WO2017169846A1 (ja) | 電動アクチュエータ | |
| JP2017180677A (ja) | 電動アクチュエータ | |
| JP6651381B2 (ja) | 電動アクチュエータ | |
| JP2018159406A (ja) | 電動アクチュエータ | |
| JP6621687B2 (ja) | 電動アクチュエータ | |
| WO2017169935A1 (ja) | 電動アクチュエータ | |
| JP6736352B2 (ja) | 電動アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200729 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210331 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20211001 |