JP2017207777A - ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 - Google Patents
ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2017207777A JP2017207777A JP2017152179A JP2017152179A JP2017207777A JP 2017207777 A JP2017207777 A JP 2017207777A JP 2017152179 A JP2017152179 A JP 2017152179A JP 2017152179 A JP2017152179 A JP 2017152179A JP 2017207777 A JP2017207777 A JP 2017207777A
- Authority
- JP
- Japan
- Prior art keywords
- sound
- sound information
- emotion
- event
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Electric Vacuum Cleaner (AREA)
Abstract
Description
じて複数の第2音情報から選択されたものであることを特徴とする。
。
(ロボット装置の構造)
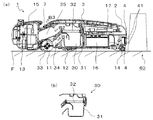
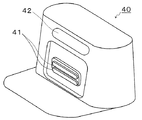
図1は、ロボット掃除機の斜視図である。 図1に示すように、ロボット掃除機1は、平面視で円形の本体筐体2と、自走するための駆動輪12(図3参照)とを備え、自走しながら集塵を行う装置である。本体筐体2の上面には、集塵部30(図4参照)を上方に出し入れする際に開閉する蓋部3と、ロボット掃除機1に対して指示入力を行う操作パネル5と、後述する充電台40からの帰還信号および図示しないリモコン装置からの信号を受信する信号受信部6と、集塵部30で塵埃が除去された空気が排気される排気口7とが設けられている。また、本体筐体2の側面には、音入力部8と、音出力部9が設けられており、本体筐体2の底面端部には一対のサイドブラシ10が設けられている。
例えばIEEE802.11等の無線LAN(Local Area Network)や、Bluetooth(登録商標)等の短距離無線を用いた通信方法でもよい。
(ロボット装置の構成)
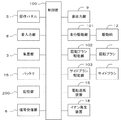
図6に本発明のロボット装置の一実施形態に係るロボット掃除機1の構成を示す。図示するように、ロボット掃除機1は、制御部100と、操作パネル5と、音入力部8と、集塵部3と、バッテリ16と、記憶部200と、信号受信部6と、音出力部9と、走行駆動部101と、駆動輪12と、回転ブラシ駆動部102と、回転ブラシ11と、サイドブラシ駆動部103と、サイドブラシ10と、電動送風機15と、イオン発生装置18とを備えている。
100からの制御信号に基づき、回転数等を決定して、サイドブラシ10を駆動させる。
(記憶部の構成)
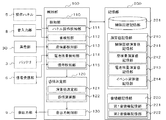
記憶部200は、掃除回数記憶部201と、演算値記憶部210と、音情報記憶部220とを備えている。

、集塵量が少ないと判断する。
表2に示すように、塵埃量が「多い」、「普通」、「少ない」の3段階に分けられており、各段階に対して、性格のタイプ毎の感情演算値M1が対応付けられている。
第2音情報記憶部222は、感情決定部120が決定する感情に基づいて出力される音情報である第2音情報を記憶している。表6に第2音情報のデータテーブルの一例を示す。表6に示すように、第2音情報は、1101〜1104の番号と対応付けて記憶されている。また、第2音情報は、感情決定部120が決定する「上機嫌」、「普通」、「不機嫌」の何れかの感情に対応付けられている。そして、感情値レベルが「上機嫌」のときは、1101A〜1104Aが出力される。また、感情値レベルが「普通」のときは、1101B〜1104Bが出力される。また、感情値レベルが「不機嫌」のときは、1101C〜1104Cが出力される。
制御部100は、検知部110、感情選択部120、および音出力制御部130を有している。
か否かを検知する。前述したように、集塵部30の塵埃量は、電動送風機15の電流値より検知される。集塵部30の取外イベントは、ロボット掃除機1の内部に配され、集塵部30の有無を検知する図示しない近接センサの信号より検知される。
M=m×M0+M1 ・・・(式2)
M=m×M0+M1+M2 ・・・(式3)
ここで、「M0」は、前回に演算したときの感情値Mを表している。また、「m」は、前回感情値Mを演算した時刻からの経過時間に応じて変動する係数(0以上1以下)を表している。係数mは、前回に感情値Mを演算した時刻からの経過時間が長いほど小さい値となる。
除機1がバッテリ16を備える場合について説明したが、バッテリー16に関する特徴部
分を除き、商用電源から直接ロボット掃除機1に電力供給されても良い。また、バッテリ
16と商用電源を併用しても良い。その場合、検知部110は、商用電源からロボット掃除機1への電力供給の有無や瞬時電圧低下等の電力供給状態を検知する。また、感情決定
部120は、検知部110が検知した電力供給状態に基づいて、感情を決定するように構成される。
(実施例1)
実施例1においては、ロボット掃除機1が第1音情報、または第2音情報をそれぞれ単独で出力する場合について説明する。図8は、実施例1の処理の流れを示すフローチャートである。なお、図8及び図9で説明するフローチャートにおいて、「ステップ」を「S」で表す。また文中でも「S」は「ステップ」を表している。
に基づいて、第1音情報の中から番号1001の「分かりました」が選択され、音出力部9より出力される。
(実施例2)
実施例2においては、ロボット掃除機1が、第1音情報および第2音情報を繋げて出力する場合について説明する。図9は、実施例2の処理の流れを示すフローチャートである。実施例1と同じ処理を行うステップについては、説明を省略する、
まず、検知部110は、ロボット掃除機1に関するイベントの発生を検知する(S21)。次に、制御部100は、検知したイベントに対応する音情報を指定する(S22)。
て出力する音の間に音が出力されない時間が全くない場合だけではなく、一定の時間がある場合も含む。すなわち、第1音情報に対応する音と第2音情報に対応する音が連続して出力される場合を広く含むものである。
(その他の実施例)
ロボット掃除機1が第1音情報と第2音情報を繋げて出力する場合において、図9のS27で選択される第2音情報は、複数であっても良い。例えば、指定された第1音情報が、番号1015の「ゴミを捨ててください」であり、選択された「不機嫌」の性格に基づいて、第2音情報より番号1101Cの「リフレッシュしたいよ」と、番号1104Cの「最低の気分」が選択されたものとする。このとき出力制御部130は、「リフレッシュしたいよ ゴミを捨ててください 最低の気分」の様に音情報を繋げて、音出力部9より出力される。
い。
るプログラムコードを読み出し実行することによっても、達成可能である。
)等の論理回路類などを用いることができる。
V通信網、仮想専用網(virtual private network)、電話回線網、移動体通信網、衛星
通信網等が利用可能である。また、通信ネットワークを構成する伝送媒体としては、特に限定されず、例えば、IEEE1394、USB(Universal Serial Bus)、電力線搬送、ケーブルTV回線、電話線、ADSL(Asymmetric Digital Subscriber Line)回線等の有線でも、IrDAやリモコンのような赤外線、Bluetooth(登録商標)、IEEE802.11無線、HDR(High Data Rate)、NFC(Near Field Communication)、DLNA(登録商標)(Digital Living Network Alliance)、携帯電話網、衛星
回線、地上波デジタル網等の無線でも利用可能である。
40 充電台
5 操作パネル
8 音声入力部
9 音声出力部
16 バッテリ
17 制御基板
30 集塵部
31 集塵容器
100 制御部
110 検知部
111 パネル操作検知部
112 音声検知部
113 塵埃量検知部
114 電池残量検知部
115 信号検知部
120 感情決定部
130 音出力制御部
200 記憶部
210 演算値記憶部
211 掃除回数演算値記憶部
212 塵埃量演算値記憶部
213 電池残量演算値記憶部
214 イベント演算値記憶部
220 音情報記憶部
221 第1音情報記憶部
222 第2音情報記憶部
Claims (8)
- 音を出力する音出力手段と、
検知情報に基づいてイベントの発生を検知する検知手段と、
前記音出力手段から出力される音の信号である音情報を記憶する音情報記憶手段とを備え、
前記音情報記憶手段は、第1のイベントと対応した単一の第1音情報と、第2のイベント
と対応した複数の第2音情報とを記憶しており、
前記音出力手段は、前記第1音情報及び前記第2音情報に対応した音を出力するものであり、
前記第2音情報は、前記イベントに応じて複数の前記第2音情報から選択されたものであるロボット装置。 - 前記音出力手段は、前記第1音情報と前記第2音情報を繋げて出力する請求項1に記載のロボット装置。
- ロボット装置に電力を供給する電力供給手段をさらに備え、
前記検知手段は、前記電力供給手段からの電力供給状態を前記イベントとして検知することを特徴とする請求項1又は2に記載のロボット装置。 - 掃除を行う掃除手段をさらに備え、
前記検知手段は、掃除に関する情報を前記イベントとして検知することを特徴とする請求項1から3のいずれかに記載のロボット装置。 - 掃除を実行した回数を記憶する掃除回数記憶手段をさらに備え、
前記検知手段は、前記回数を前記イベントとして検知することを特徴とする請求項4に記載のロボット装置。 - 前記掃除手段によって除去した塵埃を集塵する集塵部をさらに備え、
前記検知手段は、前記集塵部の塵埃量を前記イベントとして検知することを特徴とする請求項4又は5に記載のロボット装置。 - 請求項1から6のいずれか1項に記載のロボット装置が備えるコンピュータを動作させる制御プログラムであって、前記コンピュータを上記の各手段として機能させるための制御プログラム。
- 請求項7に記載の制御プログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017152179A JP6486422B2 (ja) | 2017-08-07 | 2017-08-07 | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017152179A JP6486422B2 (ja) | 2017-08-07 | 2017-08-07 | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012007036A Division JP2013146291A (ja) | 2012-01-17 | 2012-01-17 | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017207777A true JP2017207777A (ja) | 2017-11-24 |
| JP2017207777A5 JP2017207777A5 (ja) | 2018-02-01 |
| JP6486422B2 JP6486422B2 (ja) | 2019-03-20 |
Family
ID=60417008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017152179A Expired - Fee Related JP6486422B2 (ja) | 2017-08-07 | 2017-08-07 | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6486422B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11259271A (ja) * | 1998-03-13 | 1999-09-24 | Aqueous Reserch:Kk | エージェント装置 |
| JP2002304188A (ja) * | 2001-04-05 | 2002-10-18 | Sony Corp | 単語列出力装置および単語列出力方法、並びにプログラムおよび記録媒体 |
| JP2002358091A (ja) * | 2001-06-01 | 2002-12-13 | Matsushita Electric Ind Co Ltd | 音声合成方法および音声合成装置 |
| JP2003061882A (ja) * | 2001-08-28 | 2003-03-04 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| JP2005296512A (ja) * | 2004-04-15 | 2005-10-27 | Funai Electric Co Ltd | 自走式掃除機 |
| JP2009207633A (ja) * | 2008-03-03 | 2009-09-17 | Namco Bandai Games Inc | 玩具 |
-
2017
- 2017-08-07 JP JP2017152179A patent/JP6486422B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11259271A (ja) * | 1998-03-13 | 1999-09-24 | Aqueous Reserch:Kk | エージェント装置 |
| JP2002304188A (ja) * | 2001-04-05 | 2002-10-18 | Sony Corp | 単語列出力装置および単語列出力方法、並びにプログラムおよび記録媒体 |
| JP2002358091A (ja) * | 2001-06-01 | 2002-12-13 | Matsushita Electric Ind Co Ltd | 音声合成方法および音声合成装置 |
| JP2003061882A (ja) * | 2001-08-28 | 2003-03-04 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| JP2005296512A (ja) * | 2004-04-15 | 2005-10-27 | Funai Electric Co Ltd | 自走式掃除機 |
| JP2009207633A (ja) * | 2008-03-03 | 2009-09-17 | Namco Bandai Games Inc | 玩具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6486422B2 (ja) | 2019-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5968627B2 (ja) | 掃除機、制御プログラム、および該制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP6109477B2 (ja) | 自走式電子機器、端末装置、および操作システム | |
| CN104053391B (zh) | 机器人装置 | |
| CN105025771A (zh) | 自走式吸尘器 | |
| US20160000289A1 (en) | Self-propelled vacuum cleaner | |
| JP5917298B2 (ja) | 自走式掃除機 | |
| JP2013230294A (ja) | 自走式掃除機 | |
| JP2014206850A (ja) | 電子機器および自走式掃除機 | |
| CN104185436A (zh) | 机器人装置、信息提供装置以及信息提供系统 | |
| JP2013169221A (ja) | 自走式掃除機 | |
| JP2015075825A (ja) | 自走式電子機器 | |
| JP2013169225A (ja) | 自走式掃除機 | |
| JP2013141341A (ja) | 自走式電子機器、電子機器の充電端子の清掃方法 | |
| JP2013171314A (ja) | 自走式電子機器 | |
| WO2013108532A1 (ja) | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2013146291A (ja) | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP6486422B2 (ja) | ロボット装置、制御プログラム、および制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2014236837A (ja) | 自走式掃除機 | |
| CN104981188A (zh) | 电子设备 | |
| JP7017983B2 (ja) | 自律走行式掃除機 | |
| JP2017192851A (ja) | ロボット装置、制御プログラム、及び制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2013146292A (ja) | ロボット装置、制御プログラム、及び制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2013234781A (ja) | 自走式イオン放出装置 | |
| JP2014147569A (ja) | 自走式電子機器 | |
| JP7502857B2 (ja) | 掃除機、家電システム、および評価方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171215 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20171215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6486422 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |