JP2017226030A - 作業装置、作業装置システム - Google Patents
作業装置、作業装置システム Download PDFInfo
- Publication number
- JP2017226030A JP2017226030A JP2016122352A JP2016122352A JP2017226030A JP 2017226030 A JP2017226030 A JP 2017226030A JP 2016122352 A JP2016122352 A JP 2016122352A JP 2016122352 A JP2016122352 A JP 2016122352A JP 2017226030 A JP2017226030 A JP 2017226030A
- Authority
- JP
- Japan
- Prior art keywords
- work
- weight
- gravity
- center
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
【解決手段】作業装置10において、作業モジュール12は、作業対象に対して作業をなすためのものである。第1方向に垂直な平面に投影したとき、作業モジュール12の重心12gは錘体15の錘重心15gの近傍に位置するように配置される。作業モジュール12は、作業対象に作業をなすためのモジュール本体12bと、モジュール本体12bから錘体駆動機構16側に延伸する延伸部12cと、を有する。
【選択図】図3
Description
本発明はこのような知見に基づき移動反力の影響を緩和するためになされた。
また、第1、第2などの用語は多様な構成要素を説明するために用いることができるが、前記構成要素は前記用語によって限定されるものではない。前記用語は一つの構成要素を他の構成要素から区別する目的でのみ用いられる。
図1は、第1の実施の形態に係る作業装置10を含む作業装置システム100を示す平面図である。図2は、作業装置システム100を示す側面図である。以下、XYZ直交座標系をもとに説明する。X軸方向は水平な左右方向に対応し、Y軸方向は水平な前後方向に対応し、Z軸方向は鉛直な上下方向に対応する。Y軸方向およびZ軸方向はそれぞれX軸方向に直交する。X軸方向は左方向、右方向あるいは横方向と、Y軸方向は前方向あるいは後方向と、Z軸方向は上方向、下方向あるいは縦方向と表記することがある。
図1において作業装置システム100を矢印Qの方向から視て向かって右側を右と、左側を左という。
図1および図2に示すように、作業装置システム100は、アーム機構102と、アーム機構102によって支持される作業装置10を備える。アーム機構102は、いわゆる産業用の多関節型ロボットの可動アームである。アーム機構102は、関節102f、関節102c、関節102e、関節102g、関節102hおよび関節102jの6個の関節によって、アーム102d、アーム102kおよびアーム102aを支持する。特に、関節102f、関節102gおよび関節102jは入力側に対して出力側を回転駆動する。関節102c、関節102eおよび関節102hは入力側に対して出力側を曲げ駆動する。アーム102dは関節102fおよび関節102cを介して基台102bに支持される。アーム102kは関節102eを介してアーム102dに支持される。アーム102aは関節102g、関節102hおよび関節102jを介してアーム102kに支持される。作業装置10はアーム102aの先端に固定される。
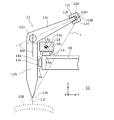
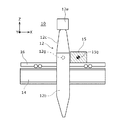
次に、作業装置10について説明する。図3は第1の実施の形態に係る作業装置10を示す側面図である。図4は作業装置10を示す正面図である。作業装置10は、作業モジュール12と、駆動機構14と、錘体駆動機構16と、支持フレーム18とを主に含む。作業装置10は、駆動機構14によって作業モジュール12を駆動してワーク108上の所望の軌跡に沿って移動させながら予め定めた作業をなす。支持フレーム18は、作業モジュール12と、駆動機構14と、錘体駆動機構16とが搭載される台状のベース部材で、アーム102aの先端に固定される。
作業モジュール12はワーク108に対して例えば加工や計測などの各種の作業をなす装置である。作業装置10では、作業モジュール12はレーザ光12rを出力可能に構成され、レーザ光12rによってワーク108に対して切断や溶接などの加工をなす。作業モジュール12は、モジュール本体12bと、延伸部12cと、ウエイト部材12eとを主に含む。モジュール本体12bは上下方向(Z軸方向)に延在する略円筒形状を有し、その下端からワーク108に向けてレーザ光12rを出力する。レーザ光12rは図示しない光ケーブルを用いて外部から導入されてもよい。延伸部12cはモジュール本体12bの側部または上部からY軸方向で後側である錘体駆動機構16側に張出す。特に、延伸部12cは錘重心15gおよび錘体駆動機構16を覆うように設けられる。延伸部12cは、例えば棒状に形成されてもよい。作業モジュール12はモジュール本体12bと延伸部12cを含むことでX軸方向に視て屈曲するくの字状を有する。ウエイト部材12eは、延伸部12cの端部12dに取付けられる例えば円筒状やリング状の部材である。ウエイト部材12eの質量や位置を変更することで、作業モジュール12の重心の位置を変更することができる。作業モジュール12がくの字状を有することで、モジュール本体12bのY軸方向で前側(負方向側)は開放されて遮る物がない。このため、例えばワーク108が立体的で上向きの突出部がある場合にも、この突出部の干渉を受けにくい。
駆動機構14は、作業モジュール12をその可動方向であるX軸方向の任意の位置に移動させる。駆動機構14は、駆動源であるモータ(不図示)と、モータの回転運動を直線運動に変換するボールねじ機構14bと、モータを駆動する駆動回路(不図示)と、作業モジュール12を支持するスライダ機構14cとを主に含む。モータと、ボールねじ機構14bと、スライダ機構14cとは支持フレーム18に支持される。ボールねじ機構14bは、回転軸の外周にらせん状のリード溝を有しX軸方向に延伸する回転軸(不図示)と、リード溝上においてボールを介して移動可能に設けられるナット(不図示)と、回転軸の両端を回転自在に支持する軸受(不図示)とを含む。回転軸の一端は軸受から突出しており、その突出部にモータの出力軸が結合される。例えば、モータを正方向に回転させることで、ナットがリード溝の回転に沿ってX軸で正方向に移動し、モータを逆方向に回転させることで、ボールがX軸で負方向に移動する。作業モジュール12はナットの移動に同期してX軸で正方向および負方向に移動する。
錘体駆動機構16は、駆動源であるモータ(不図示)と、モータの回転運動を直線運動に変換する運動変換機構であるボールねじ機構16bと、モータを駆動する駆動回路(不図示)と、錘体15と、スライダ機構16cとを主に含む。モータと、ボールねじ機構16bと、錘体15とは支持フレーム18に支持される。ボールねじ機構16bはボールねじ機構14bと同様に構成されており、重複する説明は省く。錘体15はボールねじ機構16bのスライダ機構16c上に配設されており、モータを正方向に回転させることでX軸で正方向に移動し、モータを逆方向に回転させることで、X軸で負方向に移動する。錘体15の移動軌跡は作業モジュール12の移動軌跡と平行に設けられる。
作業装置10では、作業モジュール12の移動反力の少なくとも一部を打ち消すように錘体15を移動させる錘体駆動機構16を備え、YZ平面に投影したとき、作業モジュール12の重心12gは錘体15の錘重心15gの近傍に位置するように配置される。この構成によれば、錘体駆動機構16を備えるから作業モジュール12の移動反力の影響が緩和される。また、重心12gが錘重心15gから離れている場合に比べて、これらの反力に起因する回転モーメントを小さくすることができる。この結果、作業装置10や作業装置システム100に与える振動を小さくして作業精度の低下を抑制することができる。
次に、変形例について説明する。第1の実施の形態の説明では、作業モジュール12が錘体15または錘体駆動機構16にオーバーハングする部分を有することで、重心12gを錘重心15gに近づける例について説明したがこれに限られない。錘体と錘体駆動機構の少なくとも一方に、作業モジュールにオーバーハングする部分を設けるようにしてもよい。
第1の実施の形態の説明では、重心12gの位置を調整する例について説明したがこれに限られない。錘重心15gの位置を調整可能な機構を設け、錘重心15gの位置を調整することで錘重心15gを重心12gに近づけるように構成してもよい。
第1の実施の形態の説明では、作業装置10が、支持機構として多関節ロボットの可動アームであるアーム機構102に支持される例について説明したがこれに限られない。作業装置10を支持する支持機構としてはガントリー型機構やカンチレバー型機構などの直交座標型機構であってもよい。
次に、本発明の第2の実施の形態に係る作業装置110について説明する。図6は、第2の実施の形態に係る作業装置110を示す側面図である。図7は作業装置110の重心の位置を示す正面図である。図8は作業装置110の重心の運動を説明する説明図である。図6から図8の説明では、第1の実施の形態と同一または同等の構成要素、部材には、同一の符号を付する。第1の実施の形態と重複する説明を適宜省略し、第1の実施の形態と相違する構成について重点的に説明する。
Claims (9)
- 支持機構に支持される作業装置であって、
作業対象に対して作業をなすための作業モジュールと、
前記作業モジュールを第1方向に移動させる駆動機構と、
前記作業モジュールの移動反力の少なくとも一部を打ち消すように錘体を移動させる錘体駆動部と、
を備え、
前記第1方向に垂直な平面に投影したとき、前記作業モジュールの重心は前記錘体の錘重心の近傍に位置するように配置されることを特徴とする作業装置。 - 前記平面に投影したとき、前記重心は前記作業モジュールの外部に位置するように配置されることを特徴とする請求項1に記載の作業装置。
- 前記作業モジュールは、前記作業対象に作業をなすためのモジュール本体と、前記モジュール本体から前記錘体駆動部側に延伸する延伸部と、を有し、
前記平面に投影したとき、前記錘重心は、前記延伸部の延伸端と前記モジュール本体の前記作業対象側の端部とを結ぶ直線より前記モジュール本体側に位置するように配置されることを特徴とする請求項1または2に記載の作業装置。 - 前記作業モジュールは、着脱可能に取付けられるウエイト部材を含むことを特徴とする請求項1から3のいずれかに記載の作業装置。
- 前記作業モジュールは、前記ウエイト部材を装着したままで、前記重心の位置を調整可能な調整機構を含むことを特徴とする請求項4に記載の作業装置。
- 前記錘体駆動部はボールねじ機構を含み、
前記平面に投影したとき、前記ボールねじ機構は前記重心の近傍に位置するように設けられることを特徴とする請求項1から5のいずれかに記載の作業装置。 - 前記作業モジュールはレーザ光を出力可能に構成されることを特徴とする請求項1から6のいずれかに記載の作業装置。
- 前記駆動機構を前記第1方向に垂直な第2方向に移動させる第2駆動機構と、
前記駆動機構の移動反力の少なくとも一部を打ち消すように第2錘体を移動させる第2錘体駆動部と、
をさらに備え、
前記第2方向に垂直な平面に投影したとき、前記第2駆動機構によって前記第2方向に移動させられる質量の重心は前記第2錘体の重心の近傍に位置するように配置されることを特徴とする請求項1から7のいずれかに記載の作業装置。 - 請求項1から8のいずれかに記載の作業装置と、
前記作業装置を支持する多関節型ロボットまたは直交座標型ロボットと、
を備えることを特徴とする作業装置システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122352A JP6629145B2 (ja) | 2016-06-21 | 2016-06-21 | 作業装置、作業装置システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122352A JP6629145B2 (ja) | 2016-06-21 | 2016-06-21 | 作業装置、作業装置システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017226030A true JP2017226030A (ja) | 2017-12-28 |
| JP6629145B2 JP6629145B2 (ja) | 2020-01-15 |
Family
ID=60890658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016122352A Active JP6629145B2 (ja) | 2016-06-21 | 2016-06-21 | 作業装置、作業装置システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6629145B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3689556A2 (en) | 2019-01-30 | 2020-08-05 | Kabushiki Kaisha Yaskawa Denki | Robot system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6224989A (ja) * | 1985-07-19 | 1987-02-02 | 株式会社 日平トヤマ | 工業用ロボツトの揺動防止装置 |
| JPH02232193A (ja) * | 1989-02-28 | 1990-09-14 | Pentel Kk | 多関節型ロボットのバランス装置 |
| JP2012144342A (ja) * | 2011-01-13 | 2012-08-02 | Takezawa Aluminum Kogyosho:Kk | トング式吊具 |
| JP2015009287A (ja) * | 2013-06-26 | 2015-01-19 | ファナック株式会社 | 物品を搬送するためのロボットハンド、ロボットハンドを備えたロボットおよびロボットシステム、ならびにロボットハンドの制御方法 |
| JP2016093225A (ja) * | 2014-11-12 | 2016-05-26 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用観察装置、医療用ビデオ顕微鏡装置及び医療用ビデオ顕微鏡システム |
-
2016
- 2016-06-21 JP JP2016122352A patent/JP6629145B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6224989A (ja) * | 1985-07-19 | 1987-02-02 | 株式会社 日平トヤマ | 工業用ロボツトの揺動防止装置 |
| JPH02232193A (ja) * | 1989-02-28 | 1990-09-14 | Pentel Kk | 多関節型ロボットのバランス装置 |
| JP2012144342A (ja) * | 2011-01-13 | 2012-08-02 | Takezawa Aluminum Kogyosho:Kk | トング式吊具 |
| JP2015009287A (ja) * | 2013-06-26 | 2015-01-19 | ファナック株式会社 | 物品を搬送するためのロボットハンド、ロボットハンドを備えたロボットおよびロボットシステム、ならびにロボットハンドの制御方法 |
| JP2016093225A (ja) * | 2014-11-12 | 2016-05-26 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用観察装置、医療用ビデオ顕微鏡装置及び医療用ビデオ顕微鏡システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3689556A2 (en) | 2019-01-30 | 2020-08-05 | Kabushiki Kaisha Yaskawa Denki | Robot system |
| US11220004B2 (en) | 2019-01-30 | 2022-01-11 | Kabushiki Kaisha Yaskawa Denki | Robot system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6629145B2 (ja) | 2020-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6698187B2 (ja) | ビジョンユニット | |
| JP4523228B2 (ja) | 機械又は計器における端部要素を支持し且つプログラム可能に駆動するための運動デバイス | |
| CN108698152B (zh) | 焊接装置及焊接装置的控制方法 | |
| JP5316124B2 (ja) | レーザー溶接装置 | |
| CN204470781U (zh) | 一种基于反射镜导光的五轴联动激光加工机床 | |
| EP4086034A1 (en) | Multi-degree-of-freedom numerical control turntable | |
| CN101722365B (zh) | 特别用于激光加工机的操作头 | |
| CN114269520B (zh) | 具有多功能刀具定向的并联运动装备 | |
| JPWO2007148620A1 (ja) | 可動部旋回可能な工作機械 | |
| US20210031296A1 (en) | Friction stir welding apparatus and friction stir welding system comprising the same | |
| JP2020078833A (ja) | 撮影装置及び工作機械 | |
| JPH09201691A (ja) | レーザ加工装置 | |
| JP7576656B2 (ja) | 多関節ロボット | |
| WO2014196066A1 (ja) | 数値制御装置 | |
| CN111819038B (zh) | 采用平行连杆机构的作业设备及其控制方法 | |
| KR101848994B1 (ko) | 병진형 델타 로봇 및 이를 포함하는 수술용 로봇 | |
| JP4220958B2 (ja) | レーザ加工ロボットシステム及びその制御方法 | |
| JP2019104097A (ja) | ロボットシステム | |
| JP2017226030A (ja) | 作業装置、作業装置システム | |
| KR20110139571A (ko) | 레이저 용접 헤드 이송장치 | |
| JP7023670B2 (ja) | 加工装置、加工機械、加工装置システム、加工装置の設計方法 | |
| JP3040448B2 (ja) | 位置決め装置 | |
| JP7770148B2 (ja) | 作業装置 | |
| US12162168B2 (en) | Method for controlling robot, robot system, and storage medium | |
| JP3090257B2 (ja) | マシニングセンタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180918 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6629145 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |