JP2017229165A - 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 - Google Patents
永久磁石同期電動機の制御装置、画像形成装置、および制御方法 Download PDFInfo
- Publication number
- JP2017229165A JP2017229165A JP2016124112A JP2016124112A JP2017229165A JP 2017229165 A JP2017229165 A JP 2017229165A JP 2016124112 A JP2016124112 A JP 2016124112A JP 2016124112 A JP2016124112 A JP 2016124112A JP 2017229165 A JP2017229165 A JP 2017229165A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- magnetic pole
- correction
- pole position
- backlash
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 124
- 230000001360 synchronised effect Effects 0.000 title claims abstract description 32
- 230000008569 process Effects 0.000 claims abstract description 108
- 238000004804 winding Methods 0.000 claims description 31
- 238000001514 detection method Methods 0.000 claims description 21
- 230000005684 electric field Effects 0.000 abstract 1
- 230000005284 excitation Effects 0.000 description 62
- 230000007704 transition Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 5
- 230000004913 activation Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000005405 multipole Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images


















Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【課題】負荷を回転駆動する永久磁石同期電動機を従来よりも確実に起動する。【解決手段】制御部23は、回転子が停止した状態において、回転子が回転しない検出用電流Iaを駆動部26により捲線33〜35に流してそのときの磁極位置情報に基づいて回転子の磁極位置を推定する位置推定処理と、推定した磁極位置に応じた角度位置から回転を始める補正用回転磁界が生じるように、回転子がそれに負荷が加わった状態では回転しない補正用電流Ib1,Ib2を捲線33〜35に流すバックラッシ補正処理と、バックラッシ補正処理233を終えた後の磁極位置である補正磁極位置を特定する位置特定処理と、特定した補正磁極位置に応じた角度位置から回転を始める磁界を回転磁界として前記駆動部により生じさせて回転子を回転させる回転制御処理と、を行う。【選択図】図4
Description
本発明は、永久磁石同期電動機の制御装置、画像形成装置、および制御方法に関する。
一般に、永久磁石同期電動機(PMSM:Permanent Magnet Synchronous Motor)は、捲線を有する固定子と永久磁石を用いた回転子とを有し、捲線に交流電流を流して回転磁界を発生させることにより、回転子をそれに同期して回転させる。
近年、センサレス型の永久磁石同期電動機が広く用いられている。センサレス型は、磁極位置を検出するための磁気センサやエンコーダを有していない。このため、センサレス型の永久磁石同期電動機の駆動には、例えば回転中に固定子の捲線に発生する誘起電圧に基づいて回転子の磁極位置および回転速度を推定する方法が用いられる。
また、センサレス型の永久磁石同期電動機が停止しているときに回転子の磁極位置を推定する手法として、インダクティブセンシングと呼ばれる方法がある。この方法は、捲線の相間に電圧を印加し、そのときに流れる電流のピーク振幅値を比較することにより磁極位置を推定するものである。この方法によると、停止している永久磁石同期電動機に回転を開始させる起動に際して、回転子の磁極位置に応じて適切に固定子を励磁することができる。
永久磁石同期電動機を安定に回転させるための先行技術として、特許文献1に記載の技術がある。特許文献1には、磁極位置を検出するセンサの出力に基づいて正弦波駆動信号を生成する駆動装置において、起動時の矩形波駆動から正弦波駆動への切替えを、起動信号の入力から目標回転数に到達する時間よりも長い一定時間が経過したときに行うことが開示されている。
また、DCモータによって負荷を回転駆動するための先行技術として、特許文献2に記載の技術がある。特許文献2には、DCモータの制御において、回転子に結合された歯車とそれに噛み合う他の歯車とのバックラッシに因る異音を低減するために、他の歯車の駆動に必要な閾値電流未満の直流電流を、起動の際に所定時間だけ供給することが開示されている。
センサレス型の永久磁石同期電動機を停止している状態から回転している状態へ移行させる起動に際して、永久磁石同期電動機の回転駆動力を負荷に伝達するギヤ間のバックラッシの影響により、脱調が生じて起動に失敗することがある、という問題があった。すなわち、停止状態において駆動ギヤの歯面と従動ギヤの歯面とが比較的に大きく離れている場合に、永久磁石同期電動機の回転子が回転磁界に追従するように回転し始めて歯面どうしが当接したときに、負荷トルクが急激に増大する。このため、回転子の回転が乱れて脱調が起こり、回転が止まってしまうことがあった。
上に述べた特許文献1の技術は、センサの出力に基づいて推定する磁極位置と実際の磁極位置とがバックラッシュに因る速度変化の影響によりずれるのを防ぐものである。また、特許文献2の技術は、同期電動機ではないDCモータを制御するためのものである。したがって、特許文献1、2の技術によっても、センサレス型の永久磁石同期電動機における上に述べた問題を解決することができなかった。
本発明は、上述の問題に鑑みてなされたもので、負荷を回転駆動する永久磁石同期電動機を従来よりも確実に起動することを目的としている。
本発明の実施形態に係る永久磁石同期電動機の制御装置は、捲線に流れる電流による回転磁界によって永久磁石を用いた回転子が回転する永久磁石同期電動機の制御装置であって、前記捲線に電流を流して前記回転子を駆動するための駆動部と、前記捲線に流れる電流または前記捲線に生じる電圧を磁極位置情報として検出する検出部と、検出された前記磁極位置情報に基づいて前記回転磁界が生成されるよう前記駆動部を制御する制御部と、を有する。前記制御部は、前記回転子が停止した状態において、前記回転子が回転しない検出用電流を前記駆動部により前記捲線に流してそのときの前記磁極位置情報に基づいて前記回転子の磁極位置を推定する位置推定処理と、推定した前記磁極位置に応じた角度位置から回転を始める補正用回転磁界が生じるように、前記回転子がそれに負荷が加わった状態では回転しない補正用電流を前記駆動部により前記捲線に流すバックラッシ補正処理と、前記バックラッシ補正処理を終えた後の前記回転子の磁極位置である補正磁極位置を特定する位置特定処理と、特定した前記補正磁極位置に応じた角度位置から回転を始める磁界を前記回転磁界として前記駆動部により生じさせて前記回転子を回転させる回転制御処理と、を行う。
本発明によると、負荷を回転駆動する永久磁石同期電動機を従来よりも確実に起動することができる。
図1には本発明の一実施形態に係るモータ制御装置21を備えた画像形成装置1の構成の概要が、図2にはブラシレスモータ3と回転体19との連結の例が、それぞれ示されている。また、図3にはブラシレスモータ3の構成が模式的に示されている。
図1において、画像形成装置1は、電子写真式のプリンタエンジン1Aを備えたカラープリンタである。プリンタエンジン1Aは4個のイメージングステーション11,12,13,14を有しており、イエロー(Y)、マゼンダ(M)、シアン(C)およびブラック(K)の4色のトナー像を並行して形成する。イメージングステーション11,12,13,14のそれぞれは、筒状の感光体、帯電チャージャ、現像器、クリーナ、および露光用の光源などを有している。
4色のトナー像は中間転写ベルト16に一次転写され、用紙カセット10から給紙ローラ15によって引き出されて搬送されてきた用紙9に二次転写される。二次転写の後、用紙9は定着器17の内部を通って上部の排紙トレイ18へ送り出される。定着器17を通過するとき、加熱および加圧によってトナー像が用紙9に定着する。
画像形成装置1は、定着器17、中間転写ベルト16、給紙ローラ15、感光体、および現像器を回転駆動する駆動源として、ブラシレスモータ3を含む複数のブラシレスモータを用いる。
図2に示すように、ブラシレスモータ3の回転軸320には、ギヤ321,325,326などを介して、負荷である回転体19が連結されている。回転体19は、例えば用紙9を搬送するためのローラである。ただし、これに限らず、定着ローラ、感光体ドラム、現像ローラ、またはベルトを巻回したプーリなどであってもよい。いずれにしても、プリンタエンジン1Aは、ブラシレスモータ3により負荷として回転駆動される回転体19を用いて用紙9を搬送しながら用紙9に画像を形成する。なお、ブラシレスモータ3の回転数に対する回転体19の回転数の比(減速比)は、例えば10:1程度とされている。
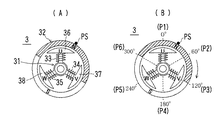
図3(A)において、ブラシレスモータ3は、センサレス型の永久磁石同期電動機(PMSM:Permanent Magnet Synchronous Motor)である。ブラシレスモータ3は、回転磁界を発生させる固定子31と、永久磁石を用いた回転子32とを備えている。固定子31は、120°間隔で配置されたU相、V相、W相のコア36,37,38、およびY結線された3つの捲線(コイル)33,34,35を有している。U相、V相およびW相の3相交流電流を捲線33〜35に流してコア36,37,38を順に励磁することによって回転磁界が生じる。回転子32は、この回転磁界によって同期して回転する。
図3に示す例では回転子32の磁極数は2である。ただし、回転子32の磁極数は2に限らず、4、6またはそれ以上の多極であってもよい。回転子32は、アウター式でもよく、インナー式でもよい。
なお、以下において、回転子32のS極およびN極のうちの黒丸で示すN極の回転位置を、回転子32の磁極位置PSということがある。また、図3(B)に示すように、U相のコア36の角度位置を位置P1といい、位置P1から右回転方向に60°ずつずれた各角度位置を位置P2,P3,P4,P5,P6ということがある。
図4にはモータ制御装置21の機能的構成の一例が、図5にはモータ制御装置21におけるモータ駆動部26および電流検出部27の構成が、それぞれ示されている。
図4のように、モータ制御装置21は、モータ駆動部26、検出部27、回転速度制御部22、および駆動制御部23を有している。
モータ駆動部26は、ブラシレスモータ3の捲線33〜35に電流を流して回転子32を駆動するためのインバータ回路である。図5のように、モータ駆動部26は、3つのデュアル素子261,262,263、およびプリドライブ回路265などから構成される。各デュアル素子261,262,263は、特性の揃った2つのトランジスタ(例えば、電界効果トランジスタ:FET)を直列接続してパッケージに収めた回路部品である。
デュアル素子261のトランジスタQ1,Q2によって、捲線33を流れる電流Iuが制御され、デュアル素子262のトランジスタQ3,Q4によって、捲線34を流れる電流Ivが制御される。そして、デュアル素子263のトランジスタQ5,Q6によって、捲線35を流れる電流Iwが制御される。
図5において、プリドライブ回路265は、駆動制御部23から入力される制御信号U+,U−,V+,V−,W+,W−を、各トランジスタQ1〜Q6に適した電圧レベルに変換する。変換後の制御信号U+,U−,V+,V−,W+,W−が、トランジスタQ1〜Q6の制御端子(ゲート)に入力される。
検出部27は、U相電流検出部271およびV相電流検出部272を有し、捲線33,34に流れる電流Iu,Ivを磁極位置情報として検出する。Iu+Iv+Iw=0であるので、検出した電流Iu,Ivから計算によって電流Iwを求めることができる。なお、捲線33〜35のそれぞれに生じる電圧を磁極位置情報として検出する構成を採用してもよい。
図4に戻って、回転速度制御部22は、本体制御部20からの通知に応じて、駆動制御部23に対して起動指令S1および停止指令S2を与える。例えば、画像形成装置1に対してプリントジョブの入力されたことが通知されたときには起動指令S1を与え、プリントジョブの完了が通知されたときには停止指令S2を与える。また、必要に応じて位置補正指令S3を与える。この他にも、回転速度Vに応じたパルス幅変調(PWM)のためのデューティ比信号、回転方向を指定する信号、減速指令(ブレーキ)などを駆動制御部23に与える。
駆動制御部23は、回転速度制御部22から入力される指令および信号に基づいて、モータ駆動部26を制御する。例えば、起動指令S1または停止指令S2に基づいてモータ駆動部26の起動および停止を制御する。パルス幅変調の指令に従ってモータ駆動部26のトランジスタQ1〜Q6を制御し、ブラシレスモータ3に回転磁界を生成する。これによってブラシレスモータ3の回転を制御する。
駆動制御部23は、回転速度推定部231、磁極位置推定部232、バックラッシ補正部233、磁極位置特定部234、および回転制御部235を有している。
回転速度推定部231は、ブラシレスモータ3が所定速度以上で回転している状態において、検出された電流Iu,Ivに基づいて、ベクトル演算などによって磁極位置PSおよび回転速度を推定する。この回転速度推定部231による推定結果に基づいて、ブラシレスモータ3のセンサレス制御が行われる。
磁極位置推定部232は、回転子32が停止した状態において、位置推定処理を行う。位置推定処理は、回転子32が回転しない程度の検出用電流Iaをモータ駆動部26により捲線33〜35に流してそのときの磁極位置情報として検出された電流Iu,Ivに基づいて回転子32の磁極位置PSを推定する処理である。
バックラッシ補正部233は、回転速度制御部22から起動指令S1、停止指令S2、または位置補正指令S3が与えられたときに、バックラッシ補正処理を行う。バックラッシ補正処理は、磁極位置推定部232により推定された磁極位置PSに応じた角度位置から回転を始める補正用回転磁界が生じるように、回転子32がそれに負荷が加わった状態では回転しない程度の補正用電流Ib1(またはIb2)をモータ駆動部26により捲線33〜35に流す処理である。
磁極位置特定部234は、位置特定処理を行う。位置特定処理は、バックラッシ補正処理を終えた後の回転子32の磁極位置PSである補正磁極位置PS2を特定する処理である。磁極位置特定部234は、位置特定処理として、位置推定処理と同じ処理を行い、それによって推定した磁極位置PSを補正磁極位置PS2として特定する。または、磁極位置推定部232により推定された磁極位置PSとあらかじめ定められたバックラッシ補正量とに基づく演算により補正磁極位置PS2を特定する。
回転制御部235は、回転速度制御部22から起動指令S1が与えられたときに、回転制御処理を行う。回転制御処理は、磁極位置特定部234により特定された補正磁極位置PS2に応じた角度位置から回転を始める磁界を回転磁界としてモータ駆動部26により生じさせて回転子32を回転させる処理である。
なお、モータ制御装置21のハードウェア構成は任意である。例えば、回転速度制御部22の機能を本体制御部20の機能とともに1つのCPU(Central Processing Unit )に設け、駆動制御部23をASIC(Application Specific Integrated Circuit)やFPGA(Field-Programmable Gate Array )などの集積回路により実現することができる。回転速度制御部22と駆動制御部23とを1つの集積回路により実現してもよい。
図6には起動時における負荷トルクの推移の例が示されている。図6において、実線の曲線L1は、バックラッシ補正処理を行った場合の推移を示し、一点鎖線の曲線L2は、バックラッシ補正処理を行わない場合の推移を示している。
駆動制御部23は、起動指令S1に従ってブラシレスモータ3を起動する。「起動」とは、回転子32が停止しているまたは停止状態にあるモータOFF状態から回転子32が回転するモータON状態へ移行させることである。
起動に際して、まず、位置推定処理を行って磁極位置PSを推定する。すなわち、センサレス方式におけるいわゆる初期位置推定を行う。次に、所定の励磁パターンによる初期励磁(直流励磁ともいう)を行って磁極位置PSを位置決めする。そして、回転磁界を生じさせて回転子32を回転させる。
ところで、初期励磁により位置決めした後、いきなり強い回転磁界を生じさせて回転子32を回転させると、図6において曲線L2で示すように、負荷トルクが最大許容トルクを超えてしまい、そのために脱調が生じることがある。脱調が生じると、回転が停止するのを待って位置推定処理からやり直さねければならず、画像の形成が遅れてしまう。
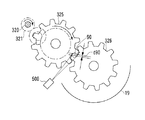
負荷トルクには、ブラシレスモータ3の回転駆動力を負荷に伝達するギヤ間のバックラッシ(遊び)が関係する。ギヤを円滑に回転させるためにバックラッシが設けられることから、モータOFF状態において駆動側のギヤ325の歯面と従動側のギヤ326の歯面との間に隙間90(図20参照)が生じることがある。この隙間90は、最大でバックラッシと同じ大きさとなる。この隙間90が大きいほど、ブラシレスモータ3の回転に伴って歯面どうしが衝突したときの衝撃が大きく、負荷トルクが急激に増大する。
そこで、駆動制御部23は、上に述べたバックラッシ補正処理を行う。これにより、ギヤ間の隙間90が無くなりまたは減少するので、歯面どうしの衝突による負荷トルクの増大が低減される。つまり、曲線L1で示すように、負荷トルクが最大許容トルク以下の範囲内で推移するようになり、脱調を生じさせることなくブラシレスモータ3を起動することができる。
以下、バックラッシ補正処理を中心にモータ制御装置21の動作をさらに説明する。
図7には起動時の駆動シーケンスの例が、図8には位置推定処理に用いる励磁パターンの例および検出用電流Iaの推移が、図9にはバックラッシ補正処理に用いる励磁パターンおよびコア36〜38の励磁の例が、図10には設定テーブル91の例が、図11には磁極位置PSの変化の例が、それぞれ示されている。
図7に示すように、(a)〜(i)の各処理を順に行う。
すなわち、(a)の位置推定処理では、図8(A)に示す6通りの励磁パターン[ 1] 〜[ 6] の励磁を例えば3300μsずつ順に行う。位置推定処理の所要時間T1は、およそ20ms程度である。各励磁パターン[ 1] 〜[ 6] においては、制御信号U+,V+,W+としてパルス幅が例えば33μsのパルス信号とし、制御信号U−,V−,W−のいずれかを選択的にONレベルとする。
位置推定処理において捲線33〜35に流す検出用電流Iaは、図11に示すようにしきい値電流Ith1よりも小さい電流に設定される。しきい値電流Ith1は、無負荷状態の回転子32を回転させることが可能な最小の電流である。つまり、位置推定処理において回転子32が回転子32が回転しないように検出用電流Iaが設定される。
回転子32である永久磁石の停止位置によって捲線33〜35のインダクタンスが変化するので、検出用電流Iaを流したときに検出される電流Iu,Iv,Iwの立ち上がりに差異が生じる。そこで、6通りの励磁のそれぞれにおける例えば制御信号U+,V+,W+のパスルの立下りのタイミングtsの電流値を比較することにより、磁極位置PSを推定する。図11(A)に示す例において、推定した磁極位置PSは、位置P6である。
図7における(b)の初期励磁および(c)の振動収束待ちは、後に行う制御に適するように磁極位置PSを位置決めするための処理である。推定された磁極位置PSに応じて、図9(A)に示す6通りの励磁パターン[ 11] 〜[ 16] のうちの1つを選択し、選択した励磁パターンの励磁を行って磁極位置PSを所定の位置に引き込む。この励磁を数ms〜数十ms程度の時間にわたって続けて回転子32を安定させる。この初期励磁により位置決めする位置が、推定した磁極位置PSに応じた角度位置の例である。
初期励磁の励磁パターン[ 11] 〜[ 16] のうち、例えば励磁パターン[ 11] では、制御信号U+,V−をONレベルとし、その他の制御信号V+,W+,U−,W−をOFFレベルとする。これにより、図9(B)の上段左部に示すように、固定子31のU相のコア36がS極に、V相のコア37がN極に励磁される。したがって、例えば図11(A)のように磁極位置PSが位置P6であるとき、コア36,37との磁気吸引によって、図11(B)に示すように、磁極位置PSは位置P6と位置P1との中間の位置に引き込まれる。
図7における(d)のバックラッシ補正処理では、初期励磁により位置決めした位置から回転を始める補正用回転磁界が生じるように、固定子31を励磁する。詳しくは、初期励磁と同じく図9に示した励磁パターン[ 11] 〜[ 16] を用い、初期励磁に用いた励磁パターンから順に励磁パターンを切り替えていく。例えば、初期励磁において励磁パターン[ 11] を用いた場合には、右回転ならば、[ 11] 、[ 12] 、[ 13] …の順に、左回転ならば、[ 11] 、[ 16] 、[ 15] …の順に励磁パターンを切り替える。
バックラッシ補正処理を行うにあたって、図10に示す設定テーブル91を参照して、補正用電流Ib1および処理時間Tdを設定する。設定テーブル91は、あらかじめ駆動制御部23による参照が可能に記憶されている。
設定テーブル91は、画像形成装置1が有する複数のブラシレスモータのそれぞれについて、負荷との間のバックラッシ、最大補正量、補正用電流Ib1、および処理時間Tdを示す。
最大補正量は、上に述べた隙間90がバックラッシと同じ大きさであった場合の回転子32の回転させるべき角度である。
補正用電流Ib1は、図7に示すようにしきい値電流Ith1よりも大きくかつしきい値電流Ith2よりも小さい電流である。しきい値電流Ith2は、負荷を回転させることができない範囲内の最大の電流である。つまり、補正用電流Ib1は、回転子32を回転させるが、負荷を回転させない電流である。
処理時間Tdは、補正用電流Ib1による励磁を行ったときに回転子32が最大補正量だけ回転するのに要する時間である。つまり、隙間90の大きさにかかわらず、少なくとも隙間90が無くなるまで回転子32を回転させることができる時間が、処理時間Tdとして定められている。
したがって、バックラッシ補正処理は、回転子32と負荷との間におけるバックラッシ量d90(隙間90の大きさ)の最大値に対応する回転量だけ回転子32が回転するのに要する時間以上にわたって補正用電流Ib1を流す処理であるといえる。
図7における(e)の位置特定処理として、(a)の位置推定処理と同じ処理を行う。すなわち、図8(A)に示す6通りの励磁パターン[ 1] 〜[ 6] の励磁を順に行って磁極位置PSを推定し、推定した磁極位置PSを補正磁極位置PS2として特定する。図11(C)に示す例においては、バックラッシ補正処理により磁極位置PSが位置P3から少し位置P4へ近づいた位置に移動しており、この磁極位置PSが補正磁極位置PS2として特定される。
図7における(f)の初期励磁および(g)の振動収束待ちは、次の(h)の強制転流に適するように磁極位置PSを位置決めするために行う。処理の内容は、基本的には(b)の初期励磁および(c)の振動収束待ちと同様である。すなわち、特定された補正磁極位置PS2に応じて、図9(A)に示す6通りの励磁パターン[ 11] 〜[ 16] のうちの1つを選択し、選択した励磁パターンの励磁を行って補正磁極位置PS2を所定の位置に引き込む。ただし、この段階では、バックラッシ補正処理により隙間90が無くなっているので、補正磁極位置PS2を引き込むには、負荷をも回転させる必要がある。したがって、励磁のために流す電流は、図7に示すように、しきい値電流Ith2よりも大きい電流Icとする。図11(C)に示す例においては、図9に示す励磁パターン[ 14] の励磁を行って補正磁極位置PS2を位置P3と位置P4との中間の位置に引き込む。
図7における(h)の強制転流および(i)のセンサレス制御は、特定した補正磁極位置PS2に応じた角度位置から回転を始める回転磁界を生じさせて回転子32を回転させる回転制御処理である。(f)の初期励磁により引き込まれた後の補正磁極位置PS2は、特定した補正磁極位置PS2に応じた角度位置の例である。回転磁界を生じさせるために、しきい値電流Ith2以上の大きさの電流Icを捲線33〜35に流す。
詳しくは、強制転流において、(f)の初期励磁と同じく図9に示した励磁パターン[ 11] 〜[ 16] を用い、(f)の初期励磁に用いた励磁パターン(例えば励磁パターン[ 14] )から順に励磁パターンを切り替えていく。これにより生じる回転磁界に同期して回転子32が回転する。励磁パターンの切替えのタイミングを徐々に早めて回転速度を増大させる。
切替えのタイミングから推定される回転速度Vがしきい値速度Vthに達すると、上に述べたように電流Iu,Ivの検出結果に基づいてベクトル演算などによって磁極位置PSおよび回転速度を推定して回転を制御するセンサレス制御に移行する。
しきい値速度Vthは、目標とする回転速度の例えば20〜30%程度の速度とすることができる。
図12には起動時の駆動シーケンスの他の例が、図13には設定テーブル92の他の例が、それぞれ示されている。
図12に示す駆動シーケンスは、回転子32が停止したときにバックラッシにより生じるギヤ間の隙間90の大きさが、ある程度の範囲内にほぼ限られるという場合に好適である。その大きさのほぼ限られる隙間90の分だけバックラッシ補正を行えば、実際の隙間90に多少の変動があったとしても、負荷トルクが最大許容トルクを超えないように隙間90を小さすることができる。
図12の駆動シーケンスは、図7の例と同様に( a)〜(c)の処理を行い、(d2)および( e2)の処理を行った後に、図7の例と同様に( h)および(i)の処理を行うものである。
(d2)のバックラッシ補正処理では、( a)の初期励磁により位置決めした位置から回転を始める補正用回転磁界が生じるように、固定子31を励磁する。このバックラッシ補正処理を行うにあたって、図13に示す設定テーブル92に基づいて、補正用電流Ib2および処理時間Td2を設定する。設定テーブル92は、あらかじめ駆動制御部23による参照が可能に記憶されている。
設定テーブル92は、画像形成装置1が有する複数のブラシレスモータのそれぞれについて、最頻バックラッシ量d92、補正量dθ、補正用電流Ib2、および処理時間Td2を示す。
最頻バックラッシ量d92は、ブラシレスモータ3の回転と停止とを多数回繰り返して停止ごとにバックラッシ量d90を測定したときの、最頻の測定値である。
補正量dθは、最頻バックラッシ量d92に対応する角度、詳しくはバックラッシ量d90が最頻バックラッシ量d92である場合における回転子32の回転させるべき角度である。
補正用電流Ib2は、図7に示すようにしきい値電流Ith1よりも大きくかつしきい値電流Ith2よりも小さい電流であって、緩やかにかつより短時間で補正量dθだけ回転子32が回転するように選定された電流である。
処理時間Td2は、補正用電流Ib2による励磁を行ったときに回転子32が少なくとも補正量dθだけ回転するのに要する時間である。
したがって、(d2)のバックラッシ補正処理は、回転子32と負荷との間におけるバックラッシ量の最頻値に対応して設定された設定時間である処理時間Td2にわたって補正用電流Ib2を流す処理であるといえる。
図14にはバックラッシ補正処理を行うタイミング(時期)Taの例が示されている。
図14(A)のように、起動指令S1が与えられたとき、すなわちモータOFF状態からモータON状態に切り替わる起動時に、バックラッシ補正処理を行う。これによれば、起動指令S1が与えられる以前に何らかの理由でバックラッシ量d90が変化することがあっても、起動時のバックラッシ量d90に応じたバックラッシ補正を行うことができ、より確実にブラシレスモータ3を起動することができる。
図14(B)および(C)のように、起動指令S1が与えられる以前のモータOFF状態である停止中に、その後の起動の準備としてバックラッシ補正処理を行う。これによれば、起動時にバックラッシ補正処理を行う場合と比べて、バックラッシ補正処理を省略する分だけ起動の所要時間を短縮することができる。
例えば、図14(B)のように、モータOFF状態になった時点から所定の時間Txが経過したときに、または位置補正指令S3が与えられたときに、バックラッシ補正処理を行う。位置補正指令S3が与えられる場合としては、ジャムの対処としてユーザにより用紙9が引き抜かれた場合のように、ブラシレスモータ3が外力により回転した可能性のあることが検知された場合などがある。
また、図14(C)のように、停止中にバックラッシ補正処理を複数回行うことができる。例えば、時間Txが経過してバックラッシ補正処理を行ったあと、さらに時間Tyが経過するごとにバックラッシ補正処理を行う。時間Tyは、時間Txと同じ長さであってもよいし、異なる長さであってもよい。バックラッシ補正処理を複数回行うことにより、モータOFF状態が長く続いた場合にも、その後の起動時における状態をバックラッシ補正された状態とすることができる。
なお、時間Txが経過する以前に起動指令S1が与えられるというように、起動の直前のモータOFF状態においてバックラッシ補正処理を行わなかった場合には、起動時にバックラッシ補正処理を行えばよい。
図14(D)のように、停止指令S2が与えられたとき、すなわちモータON状態からモータOFF状態に切り替わる停止時に、その後の起動の準備としてバックラッシ補正処理を行う。これによれば、特に比較的に短いモータOFF期間を設けるように断続的にON/OFFを繰り返す場合に、各回の起動の所要時間を短縮することができる。
次に、フローチャートを参照してモータ制御装置21における処理の流れを説明する。
図15には起動時にバックラッシ補正処理を行う場合のモータ制御装置21における処理の流れが、図16にはバックラッシ補正処理の流れの一例が、図17には位置特定処理の流れが、それぞれ示されている。
図15において、起動指令S1が与えられると(#301でYES) 、位置推定処理を行う(#302)。すなわち、停止している回転子32の磁極位置PS(初期位置)を、図8の励磁パターン[ 1] 〜[ 6] を用いてコア36〜38を励磁したときに検出された電流Iu,Ivに基づいて推定する。
次に、図9の励磁パターン[ 11] 〜[ 16] を選択的に用いて磁極位置PSを位置決めする初期励磁を行い(#303)、その後にバックラッシ補正処理を行う(#304)。
バックラッシ補正処理では、図16に示すように、設定テーブル91または設定テーブル92におけるブラシレスモータ3に関する内容を参照して、補正用電流Ib1,Ib2および処理時間Td,Td2などの処理条件を設定する(#601)。そして、設定した処理条件に従ってコア36〜38の励磁を制御して隙間90が小さくなるように回転子32を回転させる(#602)。
バックラッシ補正処理を行った後に、補正磁極位置PS2を特定する位置特定処理を行う(#305)。
位置特定処理として、例えば図17(A)に示すように位置推定処理を行う(#701)。すなわち、図8の励磁パターン[ 1] 〜[ 6] による励磁を行って磁極位置PSを推定し、推定した磁極位置PSを補正磁極位置PS2として特定する。ステップ#304のバックラッシ補正処理において設定テーブル91に基づいて処置条件を設定した場合には、この位置推定処理を行う。
または、位置特定処理として、図17(B)に示すように演算によって補正磁極位置PS2を特定する(#711)。詳しくは、位置推定処理により推定した磁極位置PSに基づいて初期励磁により位置決めした磁極位置PS6と、バックラッシ補正処理により回転させた角度である補正量とに基づいて補正磁極位置PS2を求める。すなわち、位置決めした磁極位置PS6から補正量だけ回転した位置を補正磁極位置PS2として特定する。ステップ#304のバックラッシ補正処理において設定テーブル92に基づいて処置条件を設定した場合には、この位置推定処理を行う。その場合には、補正量として、バックラッシ量d90の最頻値に対応する補正量dθを演算に用いる。
図15に戻って、位置推定処理を終えると、強制転流を行う(#306)。すなわち、特定した補正磁極位置PS2またはそれを初期励磁により引き込んだ位置から回転を始める回転磁界を生じさせる。そして、回転磁界の回転を速めていく。
回転速度Vが所定のしきい値速度Vthに達すると(#307でYES)、センサレス制御に移行する(#308)。停止指令S2が与えられるまでセンサレス制御を続け、停止指令S2が与えられると(#309でYES)、ブラシレスモータ3の駆動を停止する(#310)。これによりブラシレスモータ3はモータOFF状態になる。
図18には停止中にバックラッシ補正処理を行う場合のモータ制御装置21における処理の流れが示されている。
バックラッシ補正を行うかどうかを判断する(#401)。すなわち、図14に示した所定の時間Tx,Tyが経過し、または位置補正指令S3が与えられたかどうかを判断する。
バックラッシ補正を行うと判断すると(#401でYES)、位置推定処理(#402)、初期励磁(#403)、バックラッシ補正処理(#404)、および位置特定処理(#405)を順に行う。バックラッシ補正処理として例えば図16の処理を行い、位置特定処理として図17の処理を行う。
起動指令S1が与えられると(#406でYES)、強制転流を行う(#407)。回転速度Vが所定のしきい値速度Vthに達すると(#408でYES)、センサレス制御に移行する(#409)。そして、停止指令S2が与えられると(#410でYES)、ブラシレスモータ3の駆動を停止する(#411)。
図19には停止時にバックラッシ補正処理を行う場合のモータ制御装置21における処理の流れが示されている。
停止指令S2が与えられると(#501でYES)、ブラシレスモータ3の駆動を停止する(#502)。続いて、位置推定処理(#503)、初期励磁(#504)、バックラッシ補正処理(#505)、および位置特定処理(#506)を順に行う。バックラッシ補正処理として例えば図16の処理を行い、位置特定処理として図17の処理を行う。
起動指令S1が与えられると(#507でYES)、強制転流を行う(#508)。回転速度Vが所定のしきい値速度Vthに達すると(#509でYES)、センサレス制御に移行する(#510)。その後、停止指令S2が与えられるまでセンサレス制御を続ける。
図20にはセンサ500によるバックラッシ量d90の検出の例が、図21にはバックラッシ補正処理の流れの他の例が、それぞれ示されている。
図20に示すように、センサ500として例えばエリアセンサを用いてギヤ325とギヤ326との噛み合う部分を撮像することにより、歯面どうしの隙間90の大きさ(距離)をバックラッシ量d90として測定することができる。すなわち、撮影像に基づいて画像認識技術により隙間90を特定し、バックラッシ量d90を定量化する。
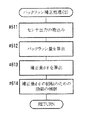
このようにバックラッシ量d90を実測する場合には、実測したバックラッシ量d90に応じてバックラッシ補正処理における補正量dθを調整することができる。図21はバックラッシ量d90を実測する場合のバックラッシ補正処理の流れを示している。
図21において、センサ500の出力を取り込み(#611)、バックラッシ量d90を算出する(#612)。算出したバックラッシ量d90を変数とし、各ギヤの径および回転の減速比などを定数とする所定の演算式に基づいて、補正量dθを算出する(#613)。そして、算出した補正量dθの回転が生じるように補正用電流Ib1および処理時間Tdを設定してコア36〜38の励磁を制御する(#614)。
つまり、図21のバックラッシ補正処理は、検出されたバックラッシ量d90に対応する回転量である補正量dθ3だけ回転子32が回転するのに要する処理時間Td以上わたって補正用電流Ibを流す処理である。
以上の実施形態によると、バックラッシ補正によりバックラッシ量d90を低減した状態で起動を行うことができるので、バックラッシに起因する負荷トルクの増大による脱調を防ぐことができ、ブラシレスモータ3を従来よりも確実に起動することができる。
バックラッシ補正処理によって変化した磁極位置PSを初期励磁により修正し、直ちに強制転流を行うので、素早く確実な起動を実現することができる。これにより、回転制御の安定度の向上、画像形成装置1の起動時間(FPOT(First Print Output Time) の短縮を図ることができる。また、起動時の負荷トルクが安定するので、許容トルクのマージンを設けず一回り小さいブラシレスモータ3を採用して画像形成装置1の省電力化およびコストダウンを図ることができる。
上に述べた実施形態において、画像形成装置1およびモータ制御装置21のそれぞれの全体または各部の構成、励磁パターン、補正用電流Ib1,Ib2の設定値、処理の内容、順序、またはタイミングなどは、本発明の趣旨に沿って適宜変更することができる。
1 画像形成装置
1A プリンタエンジン(プリンタ部)
3 ブラシレスモータ(永久磁石同期電動機)
9 用紙
19 回転体(負荷)
21 モータ制御装置(永久磁石同期電動機の制御装置)
23 駆動制御部(制御部)
26 モータ駆動部(駆動部)
27 検出部
32 回転子
33,34,35 捲線
232 磁極位置推定部(位置推定処理)
233 バックラッシ補正部(バックラッシ補正処理)
234 磁極位置特定部(位置特定処理)
500 センサ
d90 バックラッシ量
dθ 補正量(バックラッシ補正量)
Ia 検出用電流
Ib1,Ib2 補正用電流
Iu,Iv 電流(磁極位置情報)
Td1,Td2 処理時間(時間、設定時間)
1A プリンタエンジン(プリンタ部)
3 ブラシレスモータ(永久磁石同期電動機)
9 用紙
19 回転体(負荷)
21 モータ制御装置(永久磁石同期電動機の制御装置)
23 駆動制御部(制御部)
26 モータ駆動部(駆動部)
27 検出部
32 回転子
33,34,35 捲線
232 磁極位置推定部(位置推定処理)
233 バックラッシ補正部(バックラッシ補正処理)
234 磁極位置特定部(位置特定処理)
500 センサ
d90 バックラッシ量
dθ 補正量(バックラッシ補正量)
Ia 検出用電流
Ib1,Ib2 補正用電流
Iu,Iv 電流(磁極位置情報)
Td1,Td2 処理時間(時間、設定時間)
Claims (8)
- 捲線に流れる電流による回転磁界によって永久磁石を用いた回転子が回転する永久磁石同期電動機の制御装置であって、
前記捲線に電流を流して前記回転子を駆動するための駆動部と、
前記捲線に流れる電流または前記捲線に生じる電圧を磁極位置情報として検出する検出部と、
検出された前記磁極位置情報に基づいて前記回転磁界が生成されるよう前記駆動部を制御する制御部と、を有し、
前記制御部は、
前記回転子が停止した状態において、前記回転子が回転しない検出用電流を前記駆動部により前記捲線に流してそのときの前記磁極位置情報に基づいて前記回転子の磁極位置を推定する位置推定処理と、
推定した前記磁極位置に応じた角度位置から回転を始める補正用回転磁界が生じるように、前記回転子がそれに負荷が加わった状態では回転しない補正用電流を前記駆動部により前記捲線に流すバックラッシ補正処理と、
前記バックラッシ補正処理を終えた後の前記回転子の磁極位置である補正磁極位置を特定する位置特定処理と、
特定した前記補正磁極位置に応じた角度位置から回転を始める磁界を前記回転磁界として前記駆動部により生じさせて前記回転子を回転させる回転制御処理と、を行う、
ことを特徴とする永久磁石同期電動機の制御装置。 - 前記バックラッシ補正処理は、前記回転子と前記負荷との間におけるバックラッシ量の最大値に対応する回転量だけ前記回転子が回転するのに要する時間以上にわたって前記補正用電流を流す処理である、
請求項1記載の永久磁石同期電動機の制御装置。 - 前記回転子と前記負荷との間におけるバックラッシ量を検出するセンサをさらに有し、
前記バックラッシ補正処理は、検出された前記バックラッシ量に対応する回転量だけ前記回転子が回転するのに要する時間以上わたって前記補正用電流を流す処理である、
請求項1記載の永久磁石同期電動機の制御装置。 - 前記位置特定処理は、前記位置推定処理と同じ処理を行い、それによって推定した磁極位置を前記補正磁極位置として特定する処理である、
請求項1ないし3のいずれかに記載の永久磁石同期電動機の制御装置。 - 前記バックラッシ補正処理は、前記回転子と前記負荷との間におけるバックラッシ量の最頻値に対応して設定された設定時間にわたって前記補正用電流を流す処理である、
請求項1記載の永久磁石同期電動機の制御装置。 - 前記位置特定処理は、前記位置推定処理により推定した前記磁極位置とあらかじめ定められたバックラッシ補正量とに基づく演算により前記補正磁極位置を特定する処理である、
請求項5記載の永久磁石同期電動機の制御装置。 - 請求項1ないし6のいずれかに記載の永久磁石同期電動機の制御装置と、
前記負荷として前記永久磁石同期電動機により回転駆動される回転体を用いて用紙を搬送しながら当該用紙に画像を形成するプリンタ部と、を有する、
ことを特徴とする画像形成装置。 - 捲線に流れる電流による回転磁界によって永久磁石を用いた回転子が回転する永久磁石同期電動機の制御方法であって、
前記回転子が停止した状態において、前記回転子が回転しない検出用電流を前記捲線に流してそのときの前記前記捲線に流れる電流または前記捲線に生じる電圧に基づいて前記回転子の磁極位置を推定し、
推定した前記磁極位置に応じた角度位置から回転を始める補正用回転磁界が生じるように、前記回転子がそれに負荷が加わった状態では回転しない補正用電流を前記捲線に流すバックラッシ補正を行い、
前記バックラッシ補正処理を終えた後の前記回転子の磁極位置である補正磁極位置に応じた角度位置から回転を始める磁界を前記回転磁界として生じさせて前記回転子を回転させる、
ことを特徴とする永久磁石同期電動機の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016124112A JP2017229165A (ja) | 2016-06-23 | 2016-06-23 | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016124112A JP2017229165A (ja) | 2016-06-23 | 2016-06-23 | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017229165A true JP2017229165A (ja) | 2017-12-28 |
Family
ID=60889425
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016124112A Pending JP2017229165A (ja) | 2016-06-23 | 2016-06-23 | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017229165A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10747168B2 (en) | 2018-07-25 | 2020-08-18 | Canon Kabushiki Kaisha | Control apparatus for driving a member into rotation and image forming apparatus |
| JP2021027758A (ja) * | 2019-08-08 | 2021-02-22 | パナソニックIpマネジメント株式会社 | 電気洗濯機および電動機の起動方法 |
| JP2021069175A (ja) * | 2019-10-21 | 2021-04-30 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
| JP2023109007A (ja) * | 2022-01-26 | 2023-08-07 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
-
2016
- 2016-06-23 JP JP2016124112A patent/JP2017229165A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10747168B2 (en) | 2018-07-25 | 2020-08-18 | Canon Kabushiki Kaisha | Control apparatus for driving a member into rotation and image forming apparatus |
| JP2021027758A (ja) * | 2019-08-08 | 2021-02-22 | パナソニックIpマネジメント株式会社 | 電気洗濯機および電動機の起動方法 |
| JP7352770B2 (ja) | 2019-08-08 | 2023-09-29 | パナソニックIpマネジメント株式会社 | 電気洗濯機および電気洗濯機の電動機の起動方法 |
| JP2021069175A (ja) * | 2019-10-21 | 2021-04-30 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
| JP7414465B2 (ja) | 2019-10-21 | 2024-01-16 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
| JP2023109007A (ja) * | 2022-01-26 | 2023-08-07 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
| JP7801898B2 (ja) | 2022-01-26 | 2026-01-19 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10141878B2 (en) | Controller for permanent magnet synchronous motor, and control method for estimating initial position of rotor | |
| US9431940B2 (en) | Motor control apparatus for sensorless motor, and image forming apparatus | |
| US10734932B2 (en) | Motor controller, conveyor, image forming apparatus, and motor control method | |
| US9929686B2 (en) | Controller for permanent magnet synchronous motor, image forming apparatus, and control method | |
| US10141877B2 (en) | Controller for permanent magnet synchronous motor, control method, and image forming apparatus | |
| CN111342732B (zh) | 电动机控制装置以及图像形成装置 | |
| US10873282B2 (en) | Motor control apparatus for detecting stop position of rotor of motor and image forming apparatus | |
| CN111464104A (zh) | 电机控制装置、图像形成装置及初始位置推定方法 | |
| US20180175751A1 (en) | Controller for permanent magnet synchronous motor, control method, and image forming apparatus | |
| JP2018046593A (ja) | 永久磁石同期電動機の制御装置、制御方法、および画像形成装置 | |
| JP2017229165A (ja) | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 | |
| JP6834331B2 (ja) | 永久磁石同期電動機の制御装置、制御方法、および画像形成装置 | |
| JP2021191123A (ja) | モータ制御装置及び画像形成装置 | |
| JP6631323B2 (ja) | 永久磁石同期電動機の制御装置および制御方法 | |
| JP2017158354A (ja) | 永久磁石同期電動機の制御装置および制御方法 | |
| JP7296733B2 (ja) | モータ制御装置及び画像形成装置 | |
| JP2018098856A (ja) | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 | |
| JP5658475B2 (ja) | ステッピングモータの駆動制御装置及び画像形成装置 | |
| JP2016226217A (ja) | モータ制御装置及び画像形成装置 | |
| JP7324008B2 (ja) | モータ制御装置及び画像形成装置 | |
| JP2022011042A (ja) | モータ制御装置及び画像形成装置 | |
| US10790767B2 (en) | Control device of permanent magnet synchronous motor and image forming device | |
| US12601997B2 (en) | Image forming apparatus that detects stopping position of rotor of motor | |
| US11592775B2 (en) | Image forming apparatus | |
| JP2021027595A (ja) | モータ制御装置およびモータ制御方法 |