JP2017505100A - 2つの独立した可動部材を有するリニア電磁アクチュエータ - Google Patents
2つの独立した可動部材を有するリニア電磁アクチュエータ Download PDFInfo
- Publication number
- JP2017505100A JP2017505100A JP2016549126A JP2016549126A JP2017505100A JP 2017505100 A JP2017505100 A JP 2017505100A JP 2016549126 A JP2016549126 A JP 2016549126A JP 2016549126 A JP2016549126 A JP 2016549126A JP 2017505100 A JP2017505100 A JP 2017505100A
- Authority
- JP
- Japan
- Prior art keywords
- electromagnetic actuator
- movable member
- linear electromagnetic
- magnetic pole
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/34—Reciprocating, oscillating or vibrating parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/16—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with polarised armatures moving in alternate directions by reversal or energisation of a single coil system
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/12—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with armatures moving in alternate directions by alternate energisation of two coil systems
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
- Linear Motors (AREA)
Abstract
Description
本発明は、リニア方向に動く機械的に独立したいくつかの部材を備えた電磁アクチュエータの分野に関する。
可動部材を往復運動させる電磁リニアアクチュエータと毛を切るように作用する刃型の第2の部材とを備えた電気カミソリに関し、特許文献1が、従来技術として知られている。これらの部材は磁化されている。
(欧州特許出願)
また、運動系の運動方向に対して垂直な方向に磁化している1セットの永久磁石であって、異なる極性を有する複数の磁極が磁極面において運動方向に沿って交互に繰り返す1セットの永久磁石と、永久磁石の垂直方向の並びの両側に第1の磁極および第2の磁極を有し、上記磁極の各々が上記磁極面を向いているステータと、磁極部の第1のユニット及び第2のユニットを形成する、磁極の一部分を励磁する単一相コイルと、を備えたアクチュエータを開示するものとして、特許文献2が知られている。
上記従来技術による解決法には様々な欠点が存在する。提案された構造の多くは、機械的及び/又は磁気的にバランスを欠いており、これによって、振動公害および騒音公害が引き起こされる。
〔本発明の説明〕
従って、本発明の目的は、従来のシステムを適用することを求める当業者が経験する課題を解決しつつ、2つの独立した運動を可能にするアクチュエータを提案することにある。
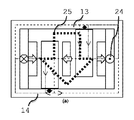
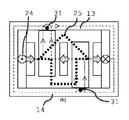
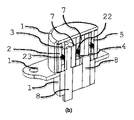
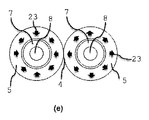
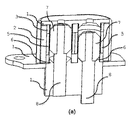
・外部の力を受けるのではなく交流電流が供給されることによって、可動部材が、図2の(a)の位置と図2の(b)の位置との間を、交互の拮抗動作で振動し、その結果、各可動部材(7)は、二者択一的に、ステータポール(13)またはステータポール(14)に接触する。
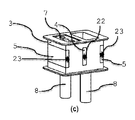
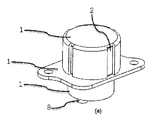
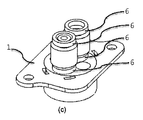
・アクチュエータを図1の(c)又は図1の(d)の位置に配置し得るような外部の力が存在する場合、ひとたび電力供給が確立されれば、アクチュエータは、単一の可動部材(7)を動かすことによって、コイル(2)に供給される電流(24)の向きに応じた図2の(a)の位置又は図2の(b)の位置に移動することができる。
Claims (16)
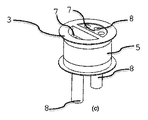
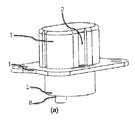
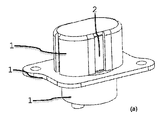
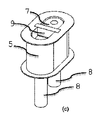
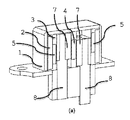
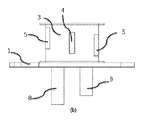
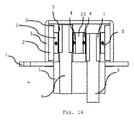
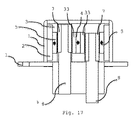
- 各可動部材(7)が強磁性材料で形成されている少なくとも2つの独立した可動部材(7)と共に、対称軸(15)の周りに配置された少なくとも1つの電気コイル(2)によって励磁されたステータ(1)と、上記コイル(2)の軸方向両側に位置する強磁性を有する2つのステータポール(13、14)と、を備えたリニア電磁アクチュエータにおいて、
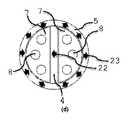
上記コイル(2)の内側に配置された少なくとも3つの着磁極(4、5)を備え、
第1の着磁極(4)が、上記2つの可動部材(7)を隔てる正中面の近傍に位置するとともに、上記コイル(2)の上記軸(15)を含んでおり、
第2の着磁極及び第3の着磁極(5)が、上記可動部材(7)の水平方向両側であって、上記可動部材(7)と上記コイル(2)との間に配置されている、ことを特徴とするリニア電磁アクチュエータ。 - 上記可動部材(7)が、同じように、ただし、反対方向に移動する、ことを特徴とする請求項1に記載のリニア電磁アクチュエータ。
- 上記第1の着磁極(4)、第2の着磁極、及び、第3の着磁極(5)が、上記コイルの軸(2)に直交する方向である横方向に磁化されている、ことを特徴とする請求項1または2に記載のリニア電磁アクチュエータ。
- 上記第2の着磁極及び第3の着磁極が同一の方向に磁化されており、上記同一の方向は上記第1の着磁極(4)の磁化方向とは反対方向である、ことを特徴とする請求項3に記載のリニア電磁アクチュエータ。
- 上記第2の着磁極及び第3の着磁極(5)が取り付けられている、ことを特徴とする請求項1から4のいずれか1項に記載のリニア電磁アクチュエータ。
- 2つのステータポールが軸方向を向いた露出部を有し、上記露出部が磁極端になっている、ことを特徴とする請求項1から5のいずれか1項に記載のリニア電磁アクチュエータ。
- 2つの電気的に独立したコイル(2)を備えている、ことを特徴とする請求項1から6のいずれか1項に記載のリニア電磁アクチュエータ。
- 上記2つのコイル(2)が重なり合っている、ことを特徴とする請求項7に記載のリニア電磁アクチュエータ。
- 永久磁石の性質を有する本体によって上記電気コイル(2)が支えられており、
上記第2の着磁極及び第3の着磁極が、少なくとも部分的に、磁化された上記本体から構成されている、ことを特徴とする請求項1から8のいずれか1項に記載のリニア電磁アクチュエータ。 - 上記電気コイル(2)が回転非対称形状を呈している、ことを特徴とする請求項1から9のいずれか1項に記載のリニア電磁アクチュエータ。
- 上記第2の着磁極及び第3の着磁極(5)が、直径方向に磁化した単一のリングから構成されている、ことを特徴とする請求項1から10のいずれか1項に記載のリニア電磁アクチュエータ。
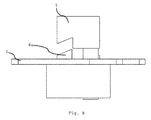
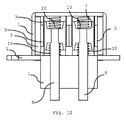
- 上記可動部材(7)のうちの少なくとも1つの位置を示す位置センサを備えている、ことを特徴とする請求項1から11のいずれか1項に記載のリニア電磁アクチュエータ。
- 上記可動部材(7)の近傍にあるハウジング(12)の内部に上記位置センサが配置されている、ことを特徴とする請求項12に記載のリニア電磁アクチュエータ。
- 上記可動部材(7)に取り付けられている複数の出力シャフト(8)によって上記可動部材(7)が伸長している、ことを特徴とする請求項1から13のいずれか1項に記載のリニア電磁アクチュエータ。
- 上記可動部材(7)と上記出力シャフト(8)とが異なる材料で出来ている、ことを特徴とする請求項1から14のいずれか1項に記載のリニア電磁アクチュエータ。
- 上記可動部材の間隔と上記出力シャフト(8)の間隔とが異なっている、ことを特徴とする請求項14または15に記載のリニア電磁アクチュエータ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1450693A FR3017011B1 (fr) | 2014-01-29 | 2014-01-29 | Actionneur electromagnetique lineaire presentant deux organes mobiles independants |
| FR1450693 | 2014-01-29 | ||
| PCT/FR2015/050207 WO2015114261A1 (fr) | 2014-01-29 | 2015-01-29 | Actionneur electromagnetique lineaire presentant deux organes mobiles independants |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017505100A true JP2017505100A (ja) | 2017-02-09 |
| JP6546183B2 JP6546183B2 (ja) | 2019-07-17 |
Family
ID=51168000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016549126A Active JP6546183B2 (ja) | 2014-01-29 | 2015-01-29 | 2つの独立した可動部材を有するリニア電磁アクチュエータ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10389197B2 (ja) |
| EP (1) | EP3100341B1 (ja) |
| JP (1) | JP6546183B2 (ja) |
| KR (1) | KR20160114656A (ja) |
| CN (1) | CN106165271B (ja) |
| FR (1) | FR3017011B1 (ja) |
| WO (1) | WO2015114261A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3042639B1 (fr) | 2015-10-20 | 2017-12-08 | Moving Magnet Tech | Actionneur lineaire a stabilite magnetique et force d'arrachement ameliorees |
| FR3064845B1 (fr) | 2017-03-30 | 2019-04-05 | Moving Magnet Technologies | Actionneur lineaire presentant deux mobiles independants et une configuration optimisee d’aimants permanents |
| FR3064835B1 (fr) | 2017-03-31 | 2020-01-17 | Moving Magnet Technologies | Stator pour machine electrique |
| US11909291B2 (en) * | 2018-06-26 | 2024-02-20 | Mitsumi Electric Co., Ltd. | Rotary reciprocating drive actuator with movable element and magnets and rotating mirror |
| FR3093874B1 (fr) * | 2019-03-15 | 2021-04-16 | Commissariat Energie Atomique | dispositif électromagnétique |
| CN112421925B (zh) * | 2019-08-20 | 2026-01-02 | Trw有限公司 | 电磁线性致动器 |
| EP3822690B1 (en) * | 2019-11-13 | 2024-04-03 | Thorlabs GmbH | Voice coil actuator for angular movements |
| CN114496601A (zh) * | 2020-11-13 | 2022-05-13 | 常州智一实业投资合伙企业(有限合伙) | 一种开关组件 |
| US11682513B1 (en) | 2021-01-06 | 2023-06-20 | The United States Of America, As Represented By The Secretary Of The Navy | Linearized pull-pull electromagnetic actuators, systems, and methods |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09313758A (ja) * | 1996-03-26 | 1997-12-09 | Matsushita Electric Works Ltd | 往復式電気かみそり |
| US6098288A (en) * | 1996-03-26 | 2000-08-08 | Matsushita Electric Works, Ltd. | Reciprocating-type electric shaver |
| JP2003068522A (ja) * | 2001-08-23 | 2003-03-07 | Yuken Kogyo Co Ltd | リニアアクチュエータ |
| JP2006081243A (ja) * | 2004-09-07 | 2006-03-23 | Nippon Pulse Motor Co Ltd | リニアアクチュエータ |
| DE102011009327A1 (de) * | 2011-01-18 | 2012-07-19 | Hydac Electronic Gmbh | Elektromagnetische Stellvorrichtung |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2320543A (en) | 1941-10-31 | 1943-06-01 | Reginald A Doughty | Wire rope clamp and socket |
| CH652462A5 (fr) | 1983-03-30 | 1985-11-15 | Sonceboz Sa | Actuateur lineaire a moteur electrique. |
| FR2648633B1 (fr) | 1989-06-16 | 1991-10-04 | Moving Magnet Tech | Actionneur electromagnetique monophase de faible encombrement |
| FR2654271B1 (fr) | 1989-11-06 | 1992-01-24 | Moving Magnet Tech | Actionneur electromagnetique monophase angulaire. |
| FR2682542B1 (fr) | 1991-10-11 | 1994-10-14 | Moving Magnet Tech | Actionneur electromagnetique comportant une structure statorique a trois poles de longueurs differentes et distributeurs pneumatiques mettant en óoeuvre de tels actionneurs. |
| FR2690793B1 (fr) * | 1992-05-04 | 1995-12-08 | Moving Magnet Tech | Actionneur electromagnetique a deux pieces mobiles en opposition de phases. |
| EP0580117A3 (en) * | 1992-07-20 | 1994-08-24 | Tdk Corp | Moving magnet-type actuator |
| FR2774824B1 (fr) | 1998-02-09 | 2000-04-28 | Moving Magnet Tech | Actionneur lineaire ameliore |
| JP2002542428A (ja) | 1999-04-19 | 2002-12-10 | ライボルト ヴァークウム ゲゼルシャフト ミット ベシュレンクテル ハフツング | 振動ピストン駆動装置 |
| FR2837033B1 (fr) | 2002-03-05 | 2004-09-24 | Moving Magnet Tech Mmt | Actionneur lineaire comprenant un moteur electrique polyphase |
| FR2884349B1 (fr) | 2005-04-06 | 2007-05-18 | Moving Magnet Tech Mmt | Actionneur electromagnetique polarise bistable a actionnement rapide |
| EP1928074B1 (fr) | 2006-11-30 | 2011-09-14 | Société Industrielle de Sonceboz S.A. | Actionneur linéaire de type vis-écrou |
| CA2741416A1 (en) * | 2008-10-22 | 2010-04-29 | Sinfonia Technology Co., Ltd. | Linear actuator |
| JP5525408B2 (ja) * | 2009-11-09 | 2014-06-18 | 山洋電気株式会社 | 電気機械装置 |
| DE102010005071A1 (de) * | 2010-01-14 | 2011-07-21 | Hydac Electronic GmbH, 66128 | Elektromagnetische Stellvorrichtung |
| FR2971902B1 (fr) | 2011-02-23 | 2013-11-08 | Moving Magnet Tech | Actionneur electromagnetique a densite de force amelioree et application a un rasoir electrique |
| JP5888867B2 (ja) * | 2011-03-31 | 2016-03-22 | 日本電産コパル株式会社 | 振動アクチュエータ |
| FR2978883B1 (fr) | 2011-08-01 | 2013-07-26 | Moving Magnet Tech | Ensemble compact de positionnement comprenant un actionneur et un capteur integre dans la culasse de l'actionneur |
| JP5929241B2 (ja) * | 2012-01-30 | 2016-06-01 | ミツミ電機株式会社 | アクチュエーター及び電動理美容器具 |
| FR2986923B1 (fr) | 2012-02-15 | 2014-10-31 | Moving Magnet Tech | Actionneur a entrainement direct compact generant une force constante |
| FR2996900B1 (fr) | 2012-10-16 | 2015-08-07 | Sonceboz Sa | Vanne munie d'un actionneur lineaire polyphase pour dosage sous haute pression |
| FR3009459A1 (fr) | 2013-07-31 | 2015-02-06 | Sonceboz Automotive Sa | Actionneur electromagnetique destine notamment au pilotage d'une soupape de decharge pour turbocompresseur |
-
2014
- 2014-01-29 FR FR1450693A patent/FR3017011B1/fr active Active
-
2015
- 2015-01-29 KR KR1020167023499A patent/KR20160114656A/ko not_active Withdrawn
- 2015-01-29 EP EP15705664.9A patent/EP3100341B1/fr active Active
- 2015-01-29 WO PCT/FR2015/050207 patent/WO2015114261A1/fr not_active Ceased
- 2015-01-29 JP JP2016549126A patent/JP6546183B2/ja active Active
- 2015-01-29 US US15/115,008 patent/US10389197B2/en active Active
- 2015-01-29 CN CN201580006712.7A patent/CN106165271B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09313758A (ja) * | 1996-03-26 | 1997-12-09 | Matsushita Electric Works Ltd | 往復式電気かみそり |
| US6098288A (en) * | 1996-03-26 | 2000-08-08 | Matsushita Electric Works, Ltd. | Reciprocating-type electric shaver |
| JP2003068522A (ja) * | 2001-08-23 | 2003-03-07 | Yuken Kogyo Co Ltd | リニアアクチュエータ |
| JP2006081243A (ja) * | 2004-09-07 | 2006-03-23 | Nippon Pulse Motor Co Ltd | リニアアクチュエータ |
| DE102011009327A1 (de) * | 2011-01-18 | 2012-07-19 | Hydac Electronic Gmbh | Elektromagnetische Stellvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3017011A1 (fr) | 2015-07-31 |
| KR20160114656A (ko) | 2016-10-05 |
| EP3100341B1 (fr) | 2020-08-12 |
| CN106165271B (zh) | 2018-12-25 |
| US10389197B2 (en) | 2019-08-20 |
| US20160352168A1 (en) | 2016-12-01 |
| EP3100341A1 (fr) | 2016-12-07 |
| WO2015114261A1 (fr) | 2015-08-06 |
| FR3017011B1 (fr) | 2019-01-25 |
| CN106165271A (zh) | 2016-11-23 |
| JP6546183B2 (ja) | 2019-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6546183B2 (ja) | 2つの独立した可動部材を有するリニア電磁アクチュエータ | |
| KR100442676B1 (ko) | 자석가동형 전자액츄에이터 | |
| JP5604097B2 (ja) | リニアモータアクチュエータ | |
| JP5433963B2 (ja) | リニアアクチュエータ | |
| JP2008237004A5 (ja) | ||
| CN107257889B (zh) | 磁轴承 | |
| JP2012511823A5 (ja) | ||
| JPH09502496A (ja) | 磁気アクチュエータを用いた膜ポンプ | |
| CN106716565B (zh) | 电磁的调整设备 | |
| US8242643B2 (en) | Three-stable oscillating electromagnetic actuator | |
| JP3818243B2 (ja) | リニア振動電機 | |
| JPH11341778A (ja) | リニアアクチュエータ | |
| JP2013541282A5 (ja) | ||
| JP5116317B2 (ja) | 円筒型リニアモータ | |
| JP2009038874A (ja) | ロータリーアクチュエータ | |
| JP4037695B2 (ja) | リニアアクチュエータ、それを用いたポンプ装置並びにコンプレッサー装置 | |
| JP5792847B2 (ja) | リニアモータアクチュエータ | |
| JP6587472B2 (ja) | アクチュエータ | |
| JP6340218B2 (ja) | リニアモータ | |
| JP2012175735A (ja) | ロータリーソレノイド | |
| KR101513879B1 (ko) | 자기 렌즈형 엑츄에이터 | |
| JP2004064838A (ja) | リニアアクチュエータ、それを用いたポンプ装置並びにコンプレッサー装置 | |
| JP2012075287A (ja) | リニアモータアクチュエータ | |
| JP2019161834A (ja) | 平面モータ | |
| JP2010187505A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6546183 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |