JP2017507799A - ロボット組立品と対応する組立方法 - Google Patents
ロボット組立品と対応する組立方法 Download PDFInfo
- Publication number
- JP2017507799A JP2017507799A JP2016557298A JP2016557298A JP2017507799A JP 2017507799 A JP2017507799 A JP 2017507799A JP 2016557298 A JP2016557298 A JP 2016557298A JP 2016557298 A JP2016557298 A JP 2016557298A JP 2017507799 A JP2017507799 A JP 2017507799A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- flange
- intermediate flange
- optical waveguide
- connection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B13/00—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00
- B05B13/02—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work
- B05B13/04—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation
- B05B13/0431—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation with spray heads moved by robots or articulated arms, e.g. for applying liquid or other fluent material to three-dimensional [3D] surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B13/00—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00
- B05B13/02—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work
- B05B13/04—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation
- B05B13/0431—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation with spray heads moved by robots or articulated arms, e.g. for applying liquid or other fluent material to three-dimensional [3D] surfaces
- B05B13/0433—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation with spray heads moved by robots or articulated arms, e.g. for applying liquid or other fluent material to three-dimensional [3D] surfaces the work being vehicle components, e.g. vehicle bodies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/27—Arm part
- Y10S901/28—Joint
- Y10S901/29—Wrist
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/30—End effector
- Y10S901/41—Tool
- Y10S901/43—Spray painting or coating
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Spray Control Apparatus (AREA)
- Manipulator (AREA)
- Nozzles (AREA)
Abstract
Description
・少なくとも1つの圧縮空気接続、具体的には、塗布装置の、駆動空気、成形空気、及び制御空気のための圧縮空気接続
・塗装剤を供給するための少なくとも1つの塗装剤接続
・洗浄剤を塗布装置に供給するための少なくとも1つの第1洗浄剤接続
・洗浄剤を塗布装置から洗い流すための少なくとも1つの第2洗浄剤接続
・塗布装置との電気接続を確立するための少なくとも1つの電気接続、例えば、塗装剤の静電帯電のための電気接続
・光導波路に接続するための少なくとも1つの光導波路接続、例えば、回転噴霧器の回転数を計測するための光導波路接続
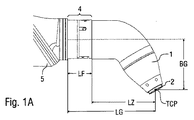
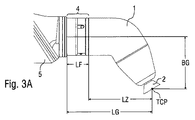
a)所定の接続構成を有するロボットフランジ(7)を備える塗布ロボットと、
b)前記ロボットフランジ(7)と前記塗布ロボットの工具中心点(TCP)との間の所定の施工長(LG)が保存されている、前記塗布ロボットを制御するためのロボット制御と、
c)前記工具中心点(TCP)に塗装剤を塗布するための塗布装置(1)であって、
c1)所定の接続構成を有する塗布装置フランジ(9)と、
c2)前記塗布装置フランジ(9)と前記工具中心点(TCP)との間の所定の施工長(LZ)と、を有する、塗布装置(1)と、
d)所定の施工長(LF)を有する中間フランジ(4)であって、
d1)前記ロボットフランジ(7)と前記塗布装置フランジ(9)との間に配置され、
d2)前記ロボットフランジ(7)の前記接続構成は前記塗布装置フランジ(9)の前記接続構成に適合している、中間フランジ(4)と、
を備え、
e)前記塗布装置(1)の前記施工長(LZ)と前記中間フランジ(4)の前記施工長(LF)との合計が、前記ロボット制御に保存されている、前記ロボットフランジ(7)と前記塗布ロボットの工具中心点(TCP)との間の前記施工長(LG)に実質的に等しくなるよう、前記中間フランジ(4)の前記施工長(LF)は、前記塗布装置(1)の前記施工長(LZ)に適合されている、ことを特徴とする、ロボット組立品。
a)前記ロボットフランジ(7)は中心軸を有し、
b)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の所定の全幅(BG)が前記ロボット制御に保存され、
c)前記中間フランジ(4)は、所定の側方オフセットで前記塗布装置(1)を前記ロボットフランジ(7)に組み付け、
d)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の前記全幅(BG)の実値が前記ロボット制御に保存されている前記全幅に適合するように、前記中間フランジ(4)を介した前記側方オフセットは前記塗布装置(1)に適合されている、付記1に記載のロボット組立品。
前記中間フランジ(4)はチューブレスである、付記1又は2に記載のロボット組立品。
前記中間フランジ(4)は、光導波路(10)を供給する末端間光導波路チャネル(11)を少なくとも1つ有する、付記1から3のいずれか1つに記載のロボット組立品。
前記中間フランジ(4)は基体を有し、前記光導波路チャネル(11)はクラッディングを有し、前記光導波路チャネル(11)の前記クラッディングは、前記基体とは異なる材料から構成されており、特に、プラスチック又は金属製である、付記4に記載のロボット組立品。
a)前記光導波路(10)は、前記中間フランジ(4)に、ネジ留め、クランプ締め、クリップ留め、及び/又は、接着されており、及び/又は、
b)前記光導波路(10)は周方向に湾曲していない、付記4又は5に記載のロボット組立品。
a)前記光導波路(10)は所定の光導波路長を有し、
b)前記光導波路(10)の前記ロボット側の接続と前記光導波路(10)の前記塗布装置側の接続との間に所定の接続距離があり、
c)前記光導波路長は、前記接続距離の300%、200%、150%、又は120%よりも短い、付記4から6のいずれか1つに記載のロボット組立品。
前記中間フランジ(4)及び/又は前記ロボットフランジ(7)及び/又は光導波路チャネル(11)のクラッディングは、少なくとも部分的には、生成的製造工程により製造される、付記1から7のいずれか1つに記載のロボット組立品。
前記塗布装置フランジ(9)の前記接続構成と前記ロボットフランジ(7)の前記接続構成は、
a)少なくとも1つの圧縮空気接続、具体的には、前記塗布装置(1)の、駆動空気、成形空気、及び制御空気のための圧縮空気接続、
b)前記塗装剤を供給するための少なくとも1つの塗装剤接続、
c)洗浄剤を前記塗布装置(1)に供給するための少なくとも1つの第1洗浄剤接続、
d)前記洗浄剤を前記塗布装置(1)から洗い流すための少なくとも1つの第2洗浄剤接続、
e)電気接続を確立するための少なくとも1つの電気接続、及び/又は、
f)光導波路に接続するための少なくとも1つの光導波路接続、を備える、付記1から8のいずれか1つに記載のロボット組立品。
前記ロボットフランジ(7)の前記接続構成は、より多くの及び/又は他の接続と選択的に接続できるよう、前記塗布装置フランジ(9)の前記接続構成よりも多くの接続を有している、付記1から9のいずれか1つに記載のロボット組立品。
前記中間フランジ(4)の前記施工長(LF)は、24cm、15cm、10cm、又は5cm未満である、付記1から10のいずれか1つに記載のロボット組立品。
a)所定の施工長(LF)を有する中間フランジ(4)を塗布ロボットのロボットフランジ(7)に組み付ける工程、
b)塗布装置フランジ(9)と工具中心点(TCP)との間に所定の施工長(LZ)を有する塗布装置(1)を前記中間フランジ(4)に組み付ける工程、
c)前記ロボットフランジ(7)と前記塗布ロボットの前記工具中心点(TCP)との間の所定の施工長(LG)をロボット制御に保存する工程、
を備え、
d)前記塗布装置(1)の前記施工長(LZ)と前記中間フランジ(4)の前記施工長(LF)との合計が、前記ロボット制御に保存されている、前記ロボットフランジ(7)と前記塗布ロボットの前記工具中心点(TCP)との間の前記施工長(LG)に実質的に等しくなるよう、前記中間フランジ(4)の前記施工長(LF)は、前記塗布装置(1)の前記施工長(LZ)に適合されている、ことを特徴とする、前記塗布装置(1)を前記塗布ロボットに組み付けるための方法。
a)前記ロボットフランジ(7)の中心軸と前記工具中心点(TCP)との間の所定の全幅(BG)が前記ロボット制御に保存され、
b)前記中間フランジ(4)は、前記工具中心点(TCP)の所定の側方オフセットで前記塗布装置(1)を前記ロボットフランジ(7)に組み付け、
c)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の前記全幅(BG)の実値が前記ロボット制御に保存されている前記全幅に適合するように、前記中間フランジ(4)を介した前記側方オフセットは前記塗布装置(1)に適合されている、付記12に記載の方法。
a)前記塗布ロボットから前記中間フランジ(4)とともに前記塗布装置(1)を取り外す工程、
b)異なる塗布装置(1)を、適切に適合した異なる中間フランジ(4)とともに、前記塗布ロボットに組み付ける工程であって、前記塗布装置(1)を取り外してから前記異なる塗布装置(1)を組み付け終わるまでの交換時間が、5分、2分、又は1分未満である工程、を備える、付記12又は13に記載の方法。
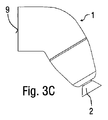
2 回転ベル
3 外部帯電リング
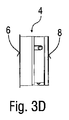
4 中間フランジ
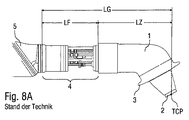
5 ロボット手首軸
6 中間フランジのロボット側のフランジフェイス
7 ロボットフランジ
8 中間フランジの噴霧器側のフランジフェイス
9 噴霧器フランジ
10 光導波路
11 光導波路チャネル
12 光導波路接続
TCP 噴霧器の工具中心点
LF 中間フランジの施工長
LZ 噴霧器の施工長
LG 中間フランジと噴霧器の全施工長
BG 中間フランジと噴霧器の全幅
Claims (14)
- a)所定の接続構成を有するロボットフランジ(7)を備える塗布ロボットと、
b)前記ロボットフランジ(7)と前記塗布ロボットの工具中心点(TCP)との間の所定の施工長(LG)が保存されている、前記塗布ロボットを制御するためのロボット制御と、
c)前記工具中心点(TCP)に塗装剤を塗布するための塗布装置(1)であって、
c1)所定の接続構成を有する塗布装置フランジ(9)と、
c2)前記塗布装置フランジ(9)と前記工具中心点(TCP)との間の所定の施工長(LZ)と、を有する、塗布装置(1)と、
d)所定の施工長(LF)を有する中間フランジ(4)であって、
d1)前記ロボットフランジ(7)と前記塗布装置フランジ(9)との間に配置され、
d2)前記ロボットフランジ(7)の前記接続構成は前記塗布装置フランジ(9)の前記接続構成に適合している、中間フランジ(4)と、
を備え、
e)前記塗布装置(1)の前記施工長(LZ)と前記中間フランジ(4)の前記施工長(LF)との合計が、前記ロボット制御に保存されている、前記ロボットフランジ(7)と前記塗布ロボットの工具中心点(TCP)との間の前記施工長(LG)に実質的に等しくなるよう、前記中間フランジ(4)の前記施工長(LF)は、前記塗布装置(1)の前記施工長(LZ)に適合されている、ことを特徴とする、ロボット組立品。 - a)前記ロボットフランジ(7)は中心軸を有し、
b)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の所定の全幅(BG)が前記ロボット制御に保存され、
c)前記中間フランジ(4)は、所定の側方オフセットで前記塗布装置(1)を前記ロボットフランジ(7)に組み付け、
d)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の前記全幅(BG)の実値が前記ロボット制御に保存されている前記全幅に適合するように、前記中間フランジ(4)を介した前記側方オフセットは前記塗布装置(1)に適合されている、請求項1に記載のロボット組立品。 - 前記中間フランジ(4)はチューブレスである、請求項1又は2に記載のロボット組立品。
- 前記中間フランジ(4)は、光導波路(10)を供給する末端間光導波路チャネル(11)を少なくとも1つ有する、請求項1から3のいずれか1項に記載のロボット組立品。
- 前記中間フランジ(4)は基体を有し、前記光導波路チャネル(11)はクラッディングを有し、前記光導波路チャネル(11)の前記クラッディングは、前記基体とは異なる材料から構成されており、特に、プラスチック又は金属製である、請求項4に記載のロボット組立品。
- a)前記光導波路(10)は、前記中間フランジ(4)に、ネジ留め、クランプ締め、クリップ留め、及び/又は、接着されており、及び/又は、
b)前記光導波路(10)は周方向に湾曲していない、請求項4又は5に記載のロボット組立品。 - a)前記光導波路(10)は所定の光導波路長を有し、
b)前記光導波路(10)の前記ロボット側の接続と前記光導波路(10)の前記塗布装置側の接続との間に所定の接続距離があり、
c)前記光導波路長は、前記接続距離の300%、200%、150%、又は120%よりも短い、請求項4から6のいずれか1項に記載のロボット組立品。 - 前記中間フランジ(4)及び/又は前記ロボットフランジ(7)及び/又は光導波路チャネル(11)のクラッディングは、少なくとも部分的には、生成的製造工程により製造される、請求項1から7のいずれか1項に記載のロボット組立品。
- 前記塗布装置フランジ(9)の前記接続構成と前記ロボットフランジ(7)の前記接続構成は、
a)少なくとも1つの圧縮空気接続、具体的には、前記塗布装置(1)の、駆動空気、成形空気、及び制御空気のための圧縮空気接続、
b)前記塗装剤を供給するための少なくとも1つの塗装剤接続、
c)洗浄剤を前記塗布装置(1)に供給するための少なくとも1つの第1洗浄剤接続、
d)前記洗浄剤を前記塗布装置(1)から洗い流すための少なくとも1つの第2洗浄剤接続、
e)電気接続を確立するための少なくとも1つの電気接続、及び/又は、
f)光導波路に接続するための少なくとも1つの光導波路接続、を備える、請求項1から8のいずれか1項に記載のロボット組立品。 - 前記ロボットフランジ(7)の前記接続構成は、より多くの及び/又は他の接続と選択的に接続できるよう、前記塗布装置フランジ(9)の前記接続構成よりも多くの接続を有している、請求項1から9のいずれか1項に記載のロボット組立品。
- 前記中間フランジ(4)の前記施工長(LF)は、24cm、15cm、10cm、又は5cm未満である、請求項1から10のいずれか1項に記載のロボット組立品。
- a)所定の施工長(LF)を有する中間フランジ(4)を塗布ロボットのロボットフランジ(7)に組み付ける工程、
b)塗布装置フランジ(9)と工具中心点(TCP)との間に所定の施工長(LZ)を有する塗布装置(1)を前記中間フランジ(4)に組み付ける工程、
c)前記ロボットフランジ(7)と前記塗布ロボットの前記工具中心点(TCP)との間の所定の施工長(LG)をロボット制御に保存する工程、
を備え、
d)前記塗布装置(1)の前記施工長(LZ)と前記中間フランジ(4)の前記施工長(LF)との合計が、前記ロボット制御に保存されている、前記ロボットフランジ(7)と前記塗布ロボットの前記工具中心点(TCP)との間の前記施工長(LG)に実質的に等しくなるよう、前記中間フランジ(4)の前記施工長(LF)は、前記塗布装置(1)の前記施工長(LZ)に適合されている、ことを特徴とする、前記塗布装置(1)を前記塗布ロボットに組み付けるための方法。 - a)前記ロボットフランジ(7)の中心軸と前記工具中心点(TCP)との間の所定の全幅(BG)が前記ロボット制御に保存され、
b)前記中間フランジ(4)は、前記工具中心点(TCP)の所定の側方オフセットで前記塗布装置(1)を前記ロボットフランジ(7)に組み付け、
c)前記ロボットフランジ(7)の前記中心軸と前記工具中心点(TCP)との間の前記全幅(BG)の実値が前記ロボット制御に保存されている前記全幅に適合するように、前記中間フランジ(4)を介した前記側方オフセットは前記塗布装置(1)に適合されている、請求項12に記載の方法。 - a)前記塗布ロボットから前記中間フランジ(4)とともに前記塗布装置(1)を取り外す工程、
b)異なる塗布装置(1)を、適切に適合した異なる中間フランジ(4)とともに、前記塗布ロボットに組み付ける工程であって、前記塗布装置(1)を取り外してから前記異なる塗布装置(1)を組み付け終わるまでの交換時間が、5分、2分、又は1分未満である工程、を備える、請求項12又は13に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014003931.5A DE102014003931B3 (de) | 2014-03-18 | 2014-03-18 | Roboteranordnung mit paarweise aneinander angepasstem Applikationsgerät mit Zwischenflansch und entsprechendes Montageverfahren |
| DE102014003931.5 | 2014-03-18 | ||
| PCT/EP2015/000504 WO2015139820A1 (de) | 2014-03-18 | 2015-03-06 | Roboteranordnung und entsprechendes montageverfahren |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017507799A true JP2017507799A (ja) | 2017-03-23 |
| JP2017507799A5 JP2017507799A5 (ja) | 2020-05-14 |
| JP6878007B2 JP6878007B2 (ja) | 2021-05-26 |
Family
ID=52686320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016557298A Active JP6878007B2 (ja) | 2014-03-18 | 2015-03-06 | ロボット組立品と対応する組立方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10493635B2 (ja) |
| EP (1) | EP3119566B1 (ja) |
| JP (1) | JP6878007B2 (ja) |
| CN (1) | CN106457577B (ja) |
| DE (1) | DE102014003931B3 (ja) |
| WO (1) | WO2015139820A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019230896A1 (ja) * | 2018-05-31 | 2019-12-05 | 川崎重工業株式会社 | ロボットアーム及びそれを備えるロボット |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110253632A (zh) * | 2019-07-23 | 2019-09-20 | 重庆卓来科技有限责任公司 | 一种机器人末端法兰及总成 |
| FR3109323B1 (fr) * | 2020-04-15 | 2022-09-23 | Exel Ind | Support pour pulvérisateur et dispositif de pulvérisation comprenant un tel support |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60213493A (ja) * | 1984-04-05 | 1985-10-25 | キヤノン株式会社 | フインガ交換装置 |
| JPS62264886A (ja) * | 1986-05-13 | 1987-11-17 | 本田技研工業株式会社 | ロボツト用ハンド交換装置 |
| US4875275A (en) * | 1987-12-07 | 1989-10-24 | Megamation Incoporated | Novel automatic tool changer |
| DE9001451U1 (de) * | 1990-02-08 | 1991-07-18 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg | Programmierhilfe für einen mehrachsigen Manipulator |
| JPH06278078A (ja) * | 1993-03-30 | 1994-10-04 | Tokico Ltd | ダイレクトドライブ形手首機構 |
| JPH11277484A (ja) * | 1998-03-31 | 1999-10-12 | Tokico Ltd | 工業用ロボット |
| JP2011054568A (ja) * | 2009-09-01 | 2011-03-17 | General Electric Co <Ge> | 調整可能プラズマスプレーガン |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58186589A (ja) * | 1982-04-27 | 1983-10-31 | 富士通フアナツク株式会社 | 工業用ロボツトのハンド交換装置 |
| DE3780874T2 (de) * | 1986-06-26 | 1993-02-04 | Illinois Tool Works | Rotierender zerstaeuber mit luftlager. |
| US4899936A (en) * | 1986-06-26 | 1990-02-13 | The Devilbiss Company | Rotary atomizer with protective shroud |
| US4919333A (en) | 1986-06-26 | 1990-04-24 | The Devilbiss Company | Rotary paint atomizing device |
| US5341458A (en) * | 1991-09-11 | 1994-08-23 | Honda Giken Kogyo Kabushiki Kaisha | Method of and system for generating teaching data for robots |
| CN1067932C (zh) | 1997-01-29 | 2001-07-04 | 株式会社安川电机 | 机器人的校准装置及方法 |
| DE29905689U1 (de) * | 1999-03-27 | 1999-07-29 | ITW Oberflächentechnik GmbH, 63128 Dietzenbach | Sprühpistolen-Roboter-Adapter |
| DE10139088A1 (de) * | 2001-08-16 | 2003-02-27 | Duerr Systems Gmbh | Manipulatormaschine mit einer zu dem Arbeitsgerät geführten Leitungsanordnung |
| SE525422E (sv) * | 2002-07-10 | 2010-07-06 | Eftec Europe Holding Ag | Anordning för applikation av ett fluidum |
| SE0501925L (sv) * | 2005-08-31 | 2007-03-01 | Ecco Finishing Ab | Sprutpistolarrangemang och förfarande för styrning av ett sådant |
| JP4835324B2 (ja) * | 2006-08-25 | 2011-12-14 | アイシン精機株式会社 | 車両用ドアハンドル装置 |
| DE102008047118B4 (de) * | 2008-09-15 | 2024-02-01 | Dürr Systems Ag | Lackieranlagenbauteil |
| CN201949970U (zh) * | 2011-02-28 | 2011-08-31 | 武汉燎原模塑有限公司 | 喷漆机器人喷枪轨迹编程用装置 |
| CN103492133B (zh) * | 2011-04-19 | 2016-04-13 | Abb研究有限公司 | 具有运动冗余臂的工业机器人和用于控制该机器人的方法 |
| US9272360B2 (en) * | 2013-03-12 | 2016-03-01 | General Electric Company | Universal plasma extension gun |
-
2014
- 2014-03-18 DE DE102014003931.5A patent/DE102014003931B3/de not_active Withdrawn - After Issue
-
2015
- 2015-03-06 JP JP2016557298A patent/JP6878007B2/ja active Active
- 2015-03-06 WO PCT/EP2015/000504 patent/WO2015139820A1/de not_active Ceased
- 2015-03-06 EP EP15710430.8A patent/EP3119566B1/de active Active
- 2015-03-06 CN CN201580013996.2A patent/CN106457577B/zh active Active
- 2015-03-06 US US15/126,735 patent/US10493635B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60213493A (ja) * | 1984-04-05 | 1985-10-25 | キヤノン株式会社 | フインガ交換装置 |
| JPS62264886A (ja) * | 1986-05-13 | 1987-11-17 | 本田技研工業株式会社 | ロボツト用ハンド交換装置 |
| US4875275A (en) * | 1987-12-07 | 1989-10-24 | Megamation Incoporated | Novel automatic tool changer |
| DE9001451U1 (de) * | 1990-02-08 | 1991-07-18 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg | Programmierhilfe für einen mehrachsigen Manipulator |
| JPH06278078A (ja) * | 1993-03-30 | 1994-10-04 | Tokico Ltd | ダイレクトドライブ形手首機構 |
| JPH11277484A (ja) * | 1998-03-31 | 1999-10-12 | Tokico Ltd | 工業用ロボット |
| JP2011054568A (ja) * | 2009-09-01 | 2011-03-17 | General Electric Co <Ge> | 調整可能プラズマスプレーガン |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019230896A1 (ja) * | 2018-05-31 | 2019-12-05 | 川崎重工業株式会社 | ロボットアーム及びそれを備えるロボット |
| JP2019209396A (ja) * | 2018-05-31 | 2019-12-12 | 川崎重工業株式会社 | ロボットアーム及びそれを備えるロボット |
| JP7121546B2 (ja) | 2018-05-31 | 2022-08-18 | 川崎重工業株式会社 | ロボットアーム及びそれを備えるロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3119566A1 (de) | 2017-01-25 |
| JP6878007B2 (ja) | 2021-05-26 |
| EP3119566B1 (de) | 2021-10-20 |
| WO2015139820A1 (de) | 2015-09-24 |
| DE102014003931B3 (de) | 2015-09-24 |
| US10493635B2 (en) | 2019-12-03 |
| CN106457577B (zh) | 2020-07-28 |
| US20170217024A1 (en) | 2017-08-03 |
| CN106457577A (zh) | 2017-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20250196182A1 (en) | Electrostatic Coating System and Method | |
| US10799905B2 (en) | Ultrasonic material applicators and methods of use thereof | |
| US20140329013A1 (en) | Dynamic symchronized masking and coating | |
| JP2017507799A (ja) | ロボット組立品と対応する組立方法 | |
| US9694378B2 (en) | Application robot having a connection unit for different applicators | |
| CN104415868A (zh) | 用于调换流体分配系统的喷嘴和喷头的方法和系统 | |
| CN113784797B (zh) | 涂覆方法及相应的涂覆设备 | |
| CN115709152A (zh) | 涂覆方法及相应的涂覆装置 | |
| JP2019511377A (ja) | コーティングロボット | |
| CN102177002A (zh) | 涂装装置和对应的运行方法 | |
| JP5189248B2 (ja) | 溶射装置 | |
| CN107169152A (zh) | 一种复杂曲面自动喷涂轨迹优化方法 | |
| JP2015188794A (ja) | 塗布装置 | |
| WO2015145950A1 (ja) | 塗布装置 | |
| CN110653102A (zh) | 一种免拆卸喷枪姿态调整装置 | |
| CN105612010B (zh) | 用于给具有特征棱边的构件喷漆的喷漆方法以及喷漆设备 | |
| EP2777822B1 (en) | Universal plasma extension gun | |
| EP3446789B1 (en) | High-volume low-pressure end effector and corresponding method | |
| JP2017507799A5 (ja) | ||
| CN106111403A (zh) | 一种用于汽车零部件生产的喷涂组件 | |
| CN116685414A (zh) | 用于涂覆粘附材料的喷嘴、用于涂覆粘附材料的施涂装置、用于涂覆粘附材料的方法以及用于车辆的构件 | |
| WO2006001178A1 (ja) | 塗装システム | |
| US9221066B2 (en) | Multi-head electrostatic painting apparatus | |
| CN204544574U (zh) | 自动喷漆机 | |
| JP7645093B2 (ja) | 塗装ロボットのティーチング方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190611 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191126 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200325 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200325 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200402 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200407 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200703 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200707 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200825 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20201027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210107 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20210126 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210309 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210413 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210413 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6878007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |