JP2017515145A - ロープロファイル屈曲光学系マルチカメラシステムにおけるオートフォーカス - Google Patents
ロープロファイル屈曲光学系マルチカメラシステムにおけるオートフォーカス Download PDFInfo
- Publication number
- JP2017515145A JP2017515145A JP2016560561A JP2016560561A JP2017515145A JP 2017515145 A JP2017515145 A JP 2017515145A JP 2016560561 A JP2016560561 A JP 2016560561A JP 2016560561 A JP2016560561 A JP 2016560561A JP 2017515145 A JP2017515145 A JP 2017515145A
- Authority
- JP
- Japan
- Prior art keywords
- lens assembly
- lens
- image
- image sensor
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0055—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element
- G02B13/006—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element at least one element being a compound optical element, e.g. cemented elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0055—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element
- G02B13/0065—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element having a beam-folding prism or mirror
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0085—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing wafer level optics
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/09—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted for automatic focusing or varying magnification
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/17—Bodies with reflectors arranged in beam forming the photographic image, e.g. for reducing dimensions of camera
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/10—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths
- H04N23/13—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths with multiple sensors
- H04N23/16—Optical arrangements associated therewith, e.g. for beam-splitting or for colour correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/45—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from two or more image sensors being of different type or operating in different modes, e.g. with a CMOS sensor for moving images in combination with a charge-coupled device [CCD] for still images
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/61—Noise processing, e.g. detecting, correcting, reducing or removing noise the noise originating only from the lens unit, e.g. flare, shading, vignetting or "cos4"
- H04N25/615—Noise processing, e.g. detecting, correcting, reducing or removing noise the noise originating only from the lens unit, e.g. flare, shading, vignetting or "cos4" involving a transfer function modelling the optical system, e.g. optical transfer function [OTF], phase transfer function [PhTF] or modulation transfer function [MTF]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/262—Studio circuits, e.g. for mixing, switching-over, change of character of image, other special effects ; Cameras specially adapted for the electronic generation of special effects
- H04N5/2624—Studio circuits, e.g. for mixing, switching-over, change of character of image, other special effects ; Cameras specially adapted for the electronic generation of special effects for obtaining an image which is composed of whole input images, e.g. splitscreen
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49826—Assembling or joining
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Optics & Photonics (AREA)
- Human Computer Interaction (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
- Lens Barrels (AREA)
- Cameras In General (AREA)
- Structure And Mechanism Of Cameras (AREA)
- Lenses (AREA)
Abstract
Description
画像センサーの方に向かう第1の方向にターゲット画像シーンの対応する複数の部分のうちの1つの部分を表す光を方向変換するように構成されたプライマリ光屈曲表面と、
プライマリ光屈曲表面から光を受信するように構成された入力表面と、画像センサーの方に向かう第2の方向に光を方向変換するように構成された第2の光屈曲表面と、セカンダリ光屈曲表面によって方向変換された光が画像センサーの方に向かう第2の方向に伝搬するための出力表面とを有する光学要素と、
光学要素の出力表面に結合される第1の表面と、画像センサーに結合される第2の表面とを有する固定部分と、プライマリ光屈曲表面と光学要素との間に配置された可動部分とを備えるレンズアセンブリと、
第1の方向に沿ってレンズアセンブリの可動部分を動かすように構成されたアクチュエータと、
アクチュエータとレンズアセンブリの可動部分との間に結合される少なくとも1つのガイドレール、少なくとも1つのガイドレールは、光軸から離れる、または光軸の周りを回転するレンズアセンブリの可動部分の動きを抑制するために、カメラ内の別の表面とスライド可能にかみ合わせるように配置され、光軸は、第1の方向に実質的に平行である、と、
対応する複数の部分に少なくとも部分的に基づいてターゲット画像シーンの最終画像を生成するように構成されたプロセッサと
を備える。
[0030]本明細書に記載される、屈曲光学マルチカメラシステムのためのオートフォーカスシステムおよび技法の実施形態は、マルチカメラシステム中の各画像センサー用に設けられた、2部レンズシステムと、オートフォーカスアセンブリとを含み得る。マルチカメラシステムは、複数の画像センサーの各々に関連付けられたプライマリおよびセカンダリ光屈曲表面を含み得る。プライマリ光屈曲表面は、反射鏡または屈折プリズムであってよく、基板に搭載されてよく、ターゲット画像シーンからの入射光を、マルチカメラシステム中の画像センサーの数に対応する複数の部分に分割することができる。セカンダリ光屈曲表面は、反射鏡または屈折プリズムであってよく、プライマリ光屈曲表面からの光の部分を、画像センサーの方に方向変換することができ、たとえばここで、画像センサーは、プライマリ光屈曲表面が搭載されているのと同じ基板上に平らに搭載される。
オートフォーカスアセンブリの概要
例示的な画像キャプチャシステムの概要
例示的な画像キャプチャプロセスの概要
例示的オートフォーカスアセンブリの概要
例示的光線追跡の概要
用語
以下に本願発明の当初の特許請求の範囲に記載された発明を付記する。
[C1]
ターゲット画像シーンの対応する複数の部分をキャプチャするように構成された複数のカメラ、前記複数のカメラのうちの1つのカメラは、
画像センサーと、
前記画像センサーの方に向かう第1の方向に、前記ターゲット画像シーンの前記対応する複数の部分の一部を表す光を方向転換するように構成されたプライマリ光屈曲表面と、
前記プライマリ光屈曲表面から前記光を受信するように構成された入力表面と、前記画像センサーの方に向かう第2の方向に、前記光を方向変換するように構成されたセカンダリ光屈曲表面と、前記セカンダリ光屈曲表面によって方向変換された光が前記画像センサーの方に向かう前記第2の方向に伝播するための出力表面とを有する光学要素と、
レンズアセンブリ、前記レンズアセンブリは、
前記光学要素の前記出力表面に結合される第1の表面と前記画像センサーに結合される第2の表面とを有する固定部分と、
前記プライマリ光屈曲表面と前記光学要素との間に配置された可動部分と
を有する、と、
前記第1の方向に沿って前記レンズアセンブリの前記可動部分を動かすように構成されたアクチュエータと、
前記アクチュエータと前記レンズアセンブリの前記可動部分との間に結合された少なくとも1つのガイドレール、前記少なくとも1つのガイドレールは、光軸から離れる、または前記光軸の周りを回転する前記レンズアセンブリの前記少なくとも1つの可動レンズの動きを抑制するために、前記カメラ内の別の表面とスライド可能にかみ合わせるように配置され、前記光軸は、前記第1の方向に実質的に平行である、と
を備える、と、
前記対応する複数の部分に少なくとも部分的に基づいて前記ターゲット画像シーンの最終画像を生成するように構成されたプロセッサと
を備える、画像キャプチャシステム。
[C2]
前記画像センサーと前記レンズアセンブリの前記固定部分との間に結合されるカバーガラスをさらに備え、前記カバーガラスは、前記レンズアセンブリの前記固定部分の前記第2の表面に結合される第1のカバーガラスと前記画像センサーに結合される第2のカバーガラスとを備え、
前記第1の方向、前記光学要素の出力表面、前記レンズアセンブリの前記固定部分の第1の表面、第1のカバーガラス、第2のカバーガラスは、前記画像センサーによって形成された平面に概して平行であり、
前記光学要素は、前記画像センサーによって形成された前記平面に概して平行に伸びるガイド表面を備え、前記ガイド表面は、前記少なくとも1つのガイドレールがスライド可能にかみ合わせるように配置される前記カメラ内の別の表面を備え、
前記光学要素の前記入力表面は、前記画像センサーによって形成された前記平面に概して垂直であり、
前記セカンダリ光屈曲表面は、前記光学要素の前記ガイド表面と前記光学要素の前記出力表面との間の角度に伸びる、
C1に記載のシステム。
[C3]
前記光学要素、前記レンズアセンブリの固定部分、カバーガラス、および画像センサーは、スタック内に接着される、
C2に記載のシステム。
[C4]
前記レンズアセンブリの前記固定部分は、フィールド補正レンズを備える、
C1に記載のシステム。
[C5]
基板をさらに備え、前記複数のカメラの各々の前記画像センサーは、前記基板におけるスロット中に挿入される、
C1に記載のシステム。
[C6]
摩擦を低減するために前記レンズアセンブリの前記可動部分および前記少なくとも1つのガイドレールの1つまたは両方に接触するように配置された、1つまたは複数のグライド、インターロックグルーブ、磁界、油、ボールベアリング、空気、ガス、または水をさらに備える、
C1に記載のシステム。
[C7]
前記アクチュエータは、前記プライマリ光屈曲表面を備えるプリズムの出力表面と前記セカンダリ光屈曲表面を備える前記光学要素の前記入力表面との間に形成される空間内の前記第1の方向に前記レンズアセンブリの前記可動部分を動かすように構成される、
C1に記載のシステム。
[C8]
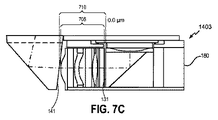
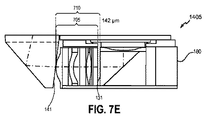
近焦点位置と遠焦点位置との間の前記空間内の前記第1の方向における前記レンズアセンブリの前記可動部分の動きは、およそ、180マイクロメータ以下である、
C7に記載のシステム。
[C9]
前記近焦点位置は、およそ200mmの焦点距離に対応し、前記遠焦点位置は、および6767mmの焦点距離に対応する、
C7に記載のシステム。
[C10]
前記レンズアセンブリの可動部分の前記可動部分は、互いに取り付けられた複数のレンズを備える、
C1に記載のシステム。
[C11]
前記プライマリ光屈曲表面は、鏡および屈折プリズムのうちの1つを備える、
C1に記載のシステム。
[C12]
前記光学要素は、鏡および屈折プリズムのうちの1つを備える、
C1に記載のシステム。
[C13]
前記光学要素は、前記屈折プリズムを備え、前記セカンダリ光屈曲表面で前記屈折プリズムに取り付けられた支持ブロックと、前記プリズムの下部プリズム表面と、前記少なくとも1つのガイドレールがスライド可能にかみ合わせられるように配置された前記カメラ内の別の表面を備える前記支持ブロックの下部ブロック表面とをさらに備える、
C12に記載のシステム。
[C14]
前記レンズアセンブリの前記可動部分に焦点を合わせるための命令を記憶するオートフォーカスモジュールをさらに備える、
C1に記載のシステム。
[C15]
前記光学要素は、前記レンズアセンブリの前記可動部分と前記アクチュエータとの間に配置される、
C1に記載のシステム。
[C16]
前記少なくとも1つのガイドレールは、第1の端部で前記アクチュエータの下部面に結合され、第2の端部で前記レンズアセンブリの前記可動部分の下部面に結合される、
C15に記載のシステム。
[C17]
画像キャプチャシステムを製造する方法であって、アレイ中の複数のカメラの各々に対して、
基板上に画像センサーを配列することと、
前記画像センサーの光受信表面にカバーガラスを取り付けることと、
基板のスロット中に前記画像センサーを置くことと、
前記基板におけるアパーチャ中にプライマリ光屈曲表面を置くこと、前記プライマリ光屈曲表面は、前記画像センサーの方に向かう第1の方向に、ターゲット画像シーンの複数の部分のうちの1つの部分を表す光を方向転換するように配置される、と、
前記カバーガラスに固定レンズを取り付けることと、
前記固定レンズにセカンダリ光屈曲表面を備える光学要素を取り付けること、前記セカンダリ光屈曲表面は、前記画像センサーの方に向かう第2の方向に、前記光を方向変換するように配置される、と、
前記光学要素と前記プライマリ光屈曲表面との間に形成される空間に可動レンズアセンブリを設けることと、
アクチュエートする手段が、光軸から離れる、または前記光軸の周りを回転する可動レンズアセンブリの動きを制限するように、前記第1の方向に実質的に平行な前記光軸に沿って前記可動レンズアセンブリを動かすために前記可動レンズアセンブリに前記アクチュエートする手段を結合すること、と
を備える、方法。
[C18]
前記画像センサーに前記カバーガラスを接着することと、前記カバーガラスに前記固定レンズを接着することと、前記固定レンズに前記光学要素を接着することとをさらに備える、
C17に記載の方法。
[C19]
前記固定レンズにフィールド補正レンズを設けることをさらに備える、
C17に記載の方法。
[C20]
摩擦を低減するために前記レンズアセンブリの前記可動部分および前記少なくとも1つのガイドレールの1つまたは両方に接触する、油、ボールベアリング、空気、ガス、または水を配置することをさらに備える、
C17に記載の方法。
[C21]
前記可動レンズアセンブリにアクチュエートする手段を結合することは、
前記基板にアクチュエータを結合することと、
第1の端部で前記アクチュエータの下部面に、第2の端部で前記レンズアセンブリの前記可動部分の下部面に、少なくとも1つのガイドレールを結合することと
を備える、C17に記載の方法。
[C22]
前記光軸から離れる、または前記光軸の周りを回転する前記可動レンズアセンブリの前記動きを抑制するために、前記光学要素のガイド表面をスライド可能に結合するために前記少なくとも1つのガイドレールを配置することをさらに備える、
C21に記載の方法。
[C23]
画像センサーおよびプライマリ光屈曲表面を有する屈曲光学画像システムのためのオートフォーカスデバイスであって、
レンズアセンブリ、前記レンズアセンブリは、
前記画像センサーに結合される固定部分と、
前記画像センサーと前記プライマリ光屈曲表面との間に配置された可動部分と
を備える、と、
前記画像センサーによって形成された平面に実質的に平行な方向の光軸に沿って前記レンズアセンブリの前記可動部分を動かすように構成されたモータと、
前記モータと前記レンズアセンブリの前記可動部分との間に結合された少なくとも1つのガイドレール、前記少なくとも1つのガイドレールは、前記光軸から離れる、または前記光軸の周りを回転する前記レンズアセンブリの前記少なくとも1つの可動レンズの動きを抑制するために、前記屈曲光学画像システム内の別の表面とスライド可能にかみ合わせるように配置される、と
を備える、オートフォーカスデバイス。
[C24]
前記別の表面をスライド可能にかみ合わせる前記ガイドレールは、チルト、ロール、ピッチ、ヨー回転方向におけるおよび線形X、Y、およびZ方向における前記レンズアセンブリの前記可動部分の動きを制限する、
C23に記載のオートフォーカスデバイス。
[C25]
前記モータは、ボイスコイルモータ、圧電性ステッパーモータ、マイクロ電子機械システム、または形状記憶合金のうちの1つを備える、
C23に記載のオートフォーカスデバイス。
[C26]
前記レンズアセンブリの前記固定部分は、フィールド補正レンズを備える、
C23に記載のオートフォーカスデバイス。
[C27]
前記センサーの光受信表面にわたって取り付けられたカバーガラスをさらに備え、前記フィールド補正レンズは、前記カバーガラスに結合される、
C26に記載のオートフォーカスデバイス。
[C28]
ターゲット画像シーンの複数の部分をキャプチャするための手段と、
レンズアセンブリの固定部分を設けるための手段と、
レンズアセンブリの可動部分を設けるための手段と、
前記レンズアセンブリの前記可動部分を動かすための手段と、
少なくとも1つの隣接表面をスライド可能にかみ合わせることによって前記レンズアセンブリの前記可動部分の動きを制御するための手段と
を備える、画像キャプチャ装置。
[C29]
前記ターゲット画像シーンの複数の部分をキャプチャするための手段は、アレイ中に配列された複数の屈曲光学カメラを備える、
C28に記載の装置。
[C30]
前記レンズアセンブリの固定部分を設けるための手段は、フィールド補正レンズを備える、
C28に記載の装置。
Claims (30)
- ターゲット画像シーンの対応する複数の部分をキャプチャするように構成された複数のカメラ、前記複数のカメラのうちの1つのカメラは、
画像センサーと、
前記画像センサーの方に向かう第1の方向に、前記ターゲット画像シーンの前記対応する複数の部分の一部を表す光を方向転換するように構成されたプライマリ光屈曲表面と、
前記プライマリ光屈曲表面から前記光を受信するように構成された入力表面と、前記画像センサーの方に向かう第2の方向に、前記光を方向変換するように構成されたセカンダリ光屈曲表面と、前記セカンダリ光屈曲表面によって方向変換された光が前記画像センサーの方に向かう前記第2の方向に伝播するための出力表面とを有する光学要素と、
レンズアセンブリ、前記レンズアセンブリは、
前記光学要素の前記出力表面に結合される第1の表面と前記画像センサーに結合される第2の表面とを有する固定部分と、
前記プライマリ光屈曲表面と前記光学要素との間に配置された可動部分と
を有する、と、
前記第1の方向に沿って前記レンズアセンブリの前記可動部分を動かすように構成されたアクチュエータと、
前記アクチュエータと前記レンズアセンブリの前記可動部分との間に結合された少なくとも1つのガイドレール、前記少なくとも1つのガイドレールは、光軸から離れる、または前記光軸の周りを回転する前記レンズアセンブリの前記少なくとも1つの可動レンズの動きを抑制するために、前記カメラ内の別の表面とスライド可能にかみ合わせるように配置され、前記光軸は、前記第1の方向に実質的に平行である、と
を備える、と、
前記対応する複数の部分に少なくとも部分的に基づいて前記ターゲット画像シーンの最終画像を生成するように構成されたプロセッサと
を備える、画像キャプチャシステム。 - 前記画像センサーと前記レンズアセンブリの前記固定部分との間に結合されるカバーガラスをさらに備え、前記カバーガラスは、前記レンズアセンブリの前記固定部分の前記第2の表面に結合される第1のカバーガラスと前記画像センサーに結合される第2のカバーガラスとを備え、
前記第1の方向、前記光学要素の出力表面、前記レンズアセンブリの前記固定部分の第1の表面、第1のカバーガラス、第2のカバーガラスは、前記画像センサーによって形成された平面に概して平行であり、
前記光学要素は、前記画像センサーによって形成された前記平面に概して平行に伸びるガイド表面を備え、前記ガイド表面は、前記少なくとも1つのガイドレールがスライド可能にかみ合わせるように配置される前記カメラ内の別の表面を備え、
前記光学要素の前記入力表面は、前記画像センサーによって形成された前記平面に概して垂直であり、
前記セカンダリ光屈曲表面は、前記光学要素の前記ガイド表面と前記光学要素の前記出力表面との間の角度に伸びる、
請求項1に記載のシステム。 - 前記光学要素、前記レンズアセンブリの固定部分、カバーガラス、および画像センサーは、スタック内に接着される、
請求項2に記載のシステム。 - 前記レンズアセンブリの前記固定部分は、フィールド補正レンズを備える、
請求項1に記載のシステム。 - 基板をさらに備え、前記複数のカメラの各々の前記画像センサーは、前記基板におけるスロット中に挿入される、
請求項1に記載のシステム。 - 摩擦を低減するために前記レンズアセンブリの前記可動部分および前記少なくとも1つのガイドレールの1つまたは両方に接触するように配置された、1つまたは複数のグライド、インターロックグルーブ、磁界、油、ボールベアリング、空気、ガス、または水をさらに備える、
請求項1に記載のシステム。 - 前記アクチュエータは、前記プライマリ光屈曲表面を備えるプリズムの出力表面と前記セカンダリ光屈曲表面を備える前記光学要素の前記入力表面との間に形成される空間内の前記第1の方向に前記レンズアセンブリの前記可動部分を動かすように構成される、
請求項1に記載のシステム。 - 近焦点位置と遠焦点位置との間の前記空間内の前記第1の方向における前記レンズアセンブリの前記可動部分の動きは、およそ、180マイクロメータ以下である、
請求項7に記載のシステム。 - 前記近焦点位置は、およそ200mmの焦点距離に対応し、前記遠焦点位置は、および6767mmの焦点距離に対応する、
請求項7に記載のシステム。 - 前記レンズアセンブリの可動部分の前記可動部分は、互いに取り付けられた複数のレンズを備える、
請求項1に記載のシステム。 - 前記プライマリ光屈曲表面は、鏡および屈折プリズムのうちの1つを備える、
請求項1に記載のシステム。 - 前記光学要素は、鏡および屈折プリズムのうちの1つを備える、
請求項1に記載のシステム。 - 前記光学要素は、前記屈折プリズムを備え、前記セカンダリ光屈曲表面で前記屈折プリズムに取り付けられた支持ブロックと、前記プリズムの下部プリズム表面と、前記少なくとも1つのガイドレールがスライド可能にかみ合わせられるように配置された前記カメラ内の別の表面を備える前記支持ブロックの下部ブロック表面とをさらに備える、
請求項12に記載のシステム。 - 前記レンズアセンブリの前記可動部分に焦点を合わせるための命令を記憶するオートフォーカスモジュールをさらに備える、
請求項1に記載のシステム。 - 前記光学要素は、前記レンズアセンブリの前記可動部分と前記アクチュエータとの間に配置される、
請求項1に記載のシステム。 - 前記少なくとも1つのガイドレールは、第1の端部で前記アクチュエータの下部面に結合され、第2の端部で前記レンズアセンブリの前記可動部分の下部面に結合される、
請求項15に記載のシステム。 - 画像キャプチャシステムを製造する方法であって、アレイ中の複数のカメラの各々に対して、
基板上に画像センサーを配列することと、
前記画像センサーの光受信表面にカバーガラスを取り付けることと、
基板のスロット中に前記画像センサーを置くことと、
前記基板におけるアパーチャ中にプライマリ光屈曲表面を置くこと、前記プライマリ光屈曲表面は、前記画像センサーの方に向かう第1の方向に、ターゲット画像シーンの複数の部分のうちの1つの部分を表す光を方向転換するように配置される、と、
前記カバーガラスに固定レンズを取り付けることと、
前記固定レンズにセカンダリ光屈曲表面を備える光学要素を取り付けること、前記セカンダリ光屈曲表面は、前記画像センサーの方に向かう第2の方向に、前記光を方向変換するように配置される、と、
前記光学要素と前記プライマリ光屈曲表面との間に形成される空間に可動レンズアセンブリを設けることと、
アクチュエートする手段が、光軸から離れる、または前記光軸の周りを回転する可動レンズアセンブリの動きを制限するように、前記第1の方向に実質的に平行な前記光軸に沿って前記可動レンズアセンブリを動かすために前記可動レンズアセンブリに前記アクチュエートする手段を結合すること、と
を備える、方法。 - 前記画像センサーに前記カバーガラスを接着することと、前記カバーガラスに前記固定レンズを接着することと、前記固定レンズに前記光学要素を接着することとをさらに備える、
請求項17に記載の方法。 - 前記固定レンズにフィールド補正レンズを設けることをさらに備える、
請求項17に記載の方法。 - 摩擦を低減するために前記レンズアセンブリの前記可動部分および前記少なくとも1つのガイドレールの1つまたは両方に接触する、油、ボールベアリング、空気、ガス、または水を配置することをさらに備える、
請求項17に記載の方法。 - 前記可動レンズアセンブリにアクチュエートする手段を結合することは、
前記基板にアクチュエータを結合することと、
第1の端部で前記アクチュエータの下部面に、第2の端部で前記レンズアセンブリの前記可動部分の下部面に、少なくとも1つのガイドレールを結合することと
を備える、請求項17に記載の方法。 - 前記光軸から離れる、または前記光軸の周りを回転する前記可動レンズアセンブリの前記動きを抑制するために、前記光学要素のガイド表面をスライド可能に結合するために前記少なくとも1つのガイドレールを配置することをさらに備える、
請求項21に記載の方法。 - 画像センサーおよびプライマリ光屈曲表面を有する屈曲光学画像システムのためのオートフォーカスデバイスであって、
レンズアセンブリ、前記レンズアセンブリは、
前記画像センサーに結合される固定部分と、
前記画像センサーと前記プライマリ光屈曲表面との間に配置された可動部分と
を備える、と、
前記画像センサーによって形成された平面に実質的に平行な方向の光軸に沿って前記レンズアセンブリの前記可動部分を動かすように構成されたモータと、
前記モータと前記レンズアセンブリの前記可動部分との間に結合された少なくとも1つのガイドレール、前記少なくとも1つのガイドレールは、前記光軸から離れる、または前記光軸の周りを回転する前記レンズアセンブリの前記少なくとも1つの可動レンズの動きを抑制するために、前記屈曲光学画像システム内の別の表面とスライド可能にかみ合わせるように配置される、と
を備える、オートフォーカスデバイス。 - 前記別の表面をスライド可能にかみ合わせる前記ガイドレールは、チルト、ロール、ピッチ、ヨー回転方向におけるおよび線形X、Y、およびZ方向における前記レンズアセンブリの前記可動部分の動きを制限する、
請求項23に記載のオートフォーカスデバイス。 - 前記モータは、ボイスコイルモータ、圧電性ステッパーモータ、マイクロ電子機械システム、または形状記憶合金のうちの1つを備える、
請求項23に記載のオートフォーカスデバイス。 - 前記レンズアセンブリの前記固定部分は、フィールド補正レンズを備える、
請求項23に記載のオートフォーカスデバイス。 - 前記センサーの光受信表面にわたって取り付けられたカバーガラスをさらに備え、前記フィールド補正レンズは、前記カバーガラスに結合される、
請求項26に記載のオートフォーカスデバイス。 - ターゲット画像シーンの複数の部分をキャプチャするための手段と、
レンズアセンブリの固定部分を設けるための手段と、
レンズアセンブリの可動部分を設けるための手段と、
前記レンズアセンブリの前記可動部分を動かすための手段と、
少なくとも1つの隣接表面をスライド可能にかみ合わせることによって前記レンズアセンブリの前記可動部分の動きを制御するための手段と
を備える、画像キャプチャ装置。 - 前記ターゲット画像シーンの複数の部分をキャプチャするための手段は、アレイ中に配列された複数の屈曲光学カメラを備える、
請求項28に記載の装置。 - 前記レンズアセンブリの固定部分を設けるための手段は、フィールド補正レンズを備える、
請求項28に記載の装置。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461975680P | 2014-04-04 | 2014-04-04 | |
| US61/975,680 | 2014-04-04 | ||
| US201462015364P | 2014-06-20 | 2014-06-20 | |
| US62/015,364 | 2014-06-20 | ||
| US14/526,104 US9374516B2 (en) | 2014-04-04 | 2014-10-28 | Auto-focus in low-profile folded optics multi-camera system |
| US14/526,104 | 2014-10-28 | ||
| PCT/US2015/022240 WO2015153200A1 (en) | 2014-04-04 | 2015-03-24 | Auto-focus in low-profile folded optics multi-camera system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017515145A true JP2017515145A (ja) | 2017-06-08 |
| JP2017515145A5 JP2017515145A5 (ja) | 2018-04-12 |
| JP6749842B2 JP6749842B2 (ja) | 2020-09-02 |
Family
ID=54210855
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016560561A Expired - Fee Related JP6749842B2 (ja) | 2014-04-04 | 2015-03-24 | ロープロファイル屈曲光学系マルチカメラシステムにおけるオートフォーカス |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US9374516B2 (ja) |
| EP (1) | EP3126892B1 (ja) |
| JP (1) | JP6749842B2 (ja) |
| KR (1) | KR20160140905A (ja) |
| CN (1) | CN106164766B (ja) |
| BR (1) | BR112016023168B1 (ja) |
| MX (1) | MX2016012729A (ja) |
| WO (1) | WO2015153200A1 (ja) |
Families Citing this family (86)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9485495B2 (en) | 2010-08-09 | 2016-11-01 | Qualcomm Incorporated | Autofocus for stereo images |
| US9438889B2 (en) | 2011-09-21 | 2016-09-06 | Qualcomm Incorporated | System and method for improving methods of manufacturing stereoscopic image sensors |
| US9398264B2 (en) | 2012-10-19 | 2016-07-19 | Qualcomm Incorporated | Multi-camera system using folded optics |
| US9185291B1 (en) | 2013-06-13 | 2015-11-10 | Corephotonics Ltd. | Dual aperture zoom digital camera |
| CN108535839B (zh) | 2013-07-04 | 2022-02-08 | 核心光电有限公司 | 小型长焦透镜套件 |
| CN108989649B (zh) | 2013-08-01 | 2021-03-19 | 核心光电有限公司 | 具有自动聚焦的纤薄多孔径成像系统及其使用方法 |
| US10178373B2 (en) | 2013-08-16 | 2019-01-08 | Qualcomm Incorporated | Stereo yaw correction using autofocus feedback |
| US9383550B2 (en) | 2014-04-04 | 2016-07-05 | Qualcomm Incorporated | Auto-focus in low-profile folded optics multi-camera system |
| US9374516B2 (en) | 2014-04-04 | 2016-06-21 | Qualcomm Incorporated | Auto-focus in low-profile folded optics multi-camera system |
| US10013764B2 (en) | 2014-06-19 | 2018-07-03 | Qualcomm Incorporated | Local adaptive histogram equalization |
| US9549107B2 (en) | 2014-06-20 | 2017-01-17 | Qualcomm Incorporated | Autofocus for folded optic array cameras |
| US9386222B2 (en) | 2014-06-20 | 2016-07-05 | Qualcomm Incorporated | Multi-camera system using folded optics free from parallax artifacts |
| US9541740B2 (en) | 2014-06-20 | 2017-01-10 | Qualcomm Incorporated | Folded optic array camera using refractive prisms |
| US9819863B2 (en) | 2014-06-20 | 2017-11-14 | Qualcomm Incorporated | Wide field of view array camera for hemispheric and spherical imaging |
| US9294672B2 (en) | 2014-06-20 | 2016-03-22 | Qualcomm Incorporated | Multi-camera system using folded optics free from parallax and tilt artifacts |
| EP3164987B1 (en) | 2014-07-01 | 2024-01-03 | Apple Inc. | Mobile camera system |
| US9392188B2 (en) | 2014-08-10 | 2016-07-12 | Corephotonics Ltd. | Zoom dual-aperture camera with folded lens |
| US9832381B2 (en) | 2014-10-31 | 2017-11-28 | Qualcomm Incorporated | Optical image stabilization for thin cameras |
| CN112327463B (zh) | 2015-01-03 | 2022-10-14 | 核心光电有限公司 | 微型长焦镜头模块和使用该镜头模块的相机 |
| KR102088603B1 (ko) | 2015-04-16 | 2020-03-13 | 코어포토닉스 리미티드 | 소형 접이식 카메라의 오토 포커스 및 광학 이미지 안정화 |
| US9961246B2 (en) * | 2015-06-18 | 2018-05-01 | Google Llc | Non-canting VCM-actuated autofocus |
| EP4425424A3 (en) | 2015-08-13 | 2024-11-20 | Corephotonics Ltd. | Dual aperture zoom camera with video support and switching / non-switching dynamic control |
| US9753255B2 (en) | 2015-11-03 | 2017-09-05 | Himax Technologies Limited | Array lens system |
| EP3165957A1 (en) * | 2015-11-05 | 2017-05-10 | Himax Technologies Limited | Array lens system |
| CN106772928A (zh) * | 2015-11-23 | 2017-05-31 | 奇景光电股份有限公司 | 阵列透镜系统 |
| US10412281B2 (en) | 2016-06-06 | 2019-09-10 | Microsoft Technology Licensing, Llc | Device with split imaging system |
| KR102903119B1 (ko) | 2016-07-07 | 2025-12-22 | 코어포토닉스 리미티드 | 폴디드 옵틱용 선형 볼 가이드 보이스 코일 모터 |
| TWI616675B (zh) | 2016-07-14 | 2018-03-01 | 大立光電股份有限公司 | 光學攝像系統組、取像裝置及電子裝置 |
| US10142526B2 (en) | 2016-07-28 | 2018-11-27 | Microsoft Technology Licensing, Llc | Self-aligning multi-part camera system |
| WO2018122650A1 (en) * | 2016-12-28 | 2018-07-05 | Corephotonics Ltd. | Folded camera structure with an extended light-folding-element scanning range |
| CN106534655B (zh) * | 2017-01-11 | 2019-04-16 | Oppo广东移动通信有限公司 | 摄像头模组及移动终端 |
| US10884321B2 (en) | 2017-01-12 | 2021-01-05 | Corephotonics Ltd. | Compact folded camera |
| KR102140582B1 (ko) * | 2017-04-28 | 2020-08-03 | 자화전자(주) | 다축 구조의 반사계 구동장치 |
| TWI781985B (zh) * | 2017-03-09 | 2022-11-01 | 美商康寧公司 | 具有自動對焦與光學圖像穩定功能的相機模組 |
| CN114137791A (zh) * | 2017-03-15 | 2022-03-04 | 核心光电有限公司 | 具有全景扫瞄范围的照相装置及移动装置 |
| KR102456315B1 (ko) | 2017-11-23 | 2022-10-18 | 코어포토닉스 리미티드 | 컴팩트 폴디드 카메라 구조 |
| US10448828B2 (en) * | 2017-12-28 | 2019-10-22 | Broadspot Imaging Corp | Multiple off-axis channel optical imaging device with rotational montage |
| US20190200857A1 (en) * | 2017-12-28 | 2019-07-04 | Broadspot Imaging Corp | Multiple off-axis channel optical imaging device utilizing upside-down pyramidal configuration |
| US10969652B2 (en) | 2018-01-10 | 2021-04-06 | Apple Inc. | Camera with folded optics having moveable lens |
| EP3739383B1 (en) * | 2018-01-12 | 2023-05-10 | Ningbo Sunny Opotech Co., Ltd. | Optical actuator, and corresponding camera module and camera module array |
| KR102770254B1 (ko) * | 2018-01-26 | 2025-02-21 | 애플 인크. | 광학기기를 이동시키기 위한 액추에이터를 갖는 접이식 카메라 |
| JP2019128517A (ja) * | 2018-01-26 | 2019-08-01 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置、及び、電子機器 |
| EP3848749A1 (en) * | 2018-02-05 | 2021-07-14 | Corephotonics Ltd. | Reduced height penalty for folded camera |
| US11061213B2 (en) * | 2018-02-07 | 2021-07-13 | Apple Inc. | Folded camera |
| US11640047B2 (en) * | 2018-02-12 | 2023-05-02 | Corephotonics Ltd. | Folded camera with optical image stabilization |
| KR102795759B1 (ko) | 2018-04-23 | 2025-04-11 | 코어포토닉스 리미티드 | 연장된 2 자유도 회전 범위를 갖는 광학 경로 폴딩 요소 |
| US11314147B1 (en) | 2018-05-31 | 2022-04-26 | Apple Inc. | Folded camera with actuator for moving optics |
| WO2019237881A1 (zh) * | 2018-06-14 | 2019-12-19 | Oppo广东移动通信有限公司 | 成像模组、摄像头组件与电子装置 |
| EP3618442B1 (en) | 2018-08-27 | 2020-09-30 | Axis AB | An image capturing device, a method and computer program product for forming an encoded image |
| WO2020074711A1 (en) | 2018-10-12 | 2020-04-16 | Polight Asa | Optical device with a light ray deflector |
| CN114615402A (zh) * | 2019-01-03 | 2022-06-10 | 核心光电有限公司 | 双重相机 |
| WO2020144528A1 (en) | 2019-01-07 | 2020-07-16 | Corephotonics Ltd. | Rotation mechanism with sliding joint |
| CN109633854B (zh) * | 2019-01-08 | 2020-09-29 | 瑞声通讯科技(常州)有限公司 | 一种图像采集器及移动电子设备 |
| US11375091B1 (en) * | 2019-04-29 | 2022-06-28 | Apple Inc. | Camera with folded optics and bearing suspension |
| KR102884604B1 (ko) * | 2019-06-17 | 2025-11-12 | 엘지이노텍 주식회사 | 카메라 모듈 |
| KR102884549B1 (ko) * | 2019-06-24 | 2025-11-11 | 엘지이노텍 주식회사 | 카메라 모듈 및 이를 포함하는 광학 기기 |
| US12585091B2 (en) | 2019-07-22 | 2026-03-24 | Apple Inc. | Camera including two light folding elements |
| KR102365748B1 (ko) | 2019-07-31 | 2022-02-23 | 코어포토닉스 리미티드 | 카메라 패닝 또는 모션에서 배경 블러링을 생성하는 시스템 및 방법 |
| US11949976B2 (en) | 2019-12-09 | 2024-04-02 | Corephotonics Ltd. | Systems and methods for obtaining a smart panoramic image |
| CN110906881A (zh) * | 2019-12-26 | 2020-03-24 | 上海广智光学实业有限公司 | 一种用于光学检测的镜头组合方法 |
| KR102811003B1 (ko) | 2020-02-22 | 2025-05-20 | 코어포토닉스 리미티드 | 매크로 촬영을 위한 분할 스크린 기능 |
| KR102345114B1 (ko) * | 2020-03-13 | 2021-12-30 | 삼성전기주식회사 | 카메라 모듈 |
| KR102389192B1 (ko) * | 2020-03-16 | 2022-04-22 | 삼성전기주식회사 | 폴디드 모듈 및 이를 포함하는 휴대용 전자기기 |
| US11656476B2 (en) | 2020-03-16 | 2023-05-23 | Samsung Electro-Mechanics Co., Ltd. | Folded module and portable electronic device including a folded module |
| CN117372248A (zh) | 2020-05-17 | 2024-01-09 | 核心光电有限公司 | 全视场参考图像的图像拼接 |
| KR20250156831A (ko) | 2020-05-30 | 2025-11-03 | 코어포토닉스 리미티드 | 슈퍼 매크로 이미지를 얻기 위한 시스템 및 방법 |
| US11637977B2 (en) | 2020-07-15 | 2023-04-25 | Corephotonics Ltd. | Image sensors and sensing methods to obtain time-of-flight and phase detection information |
| CN119355935A (zh) | 2020-07-15 | 2025-01-24 | 核心光电有限公司 | 用于校正扫描折叠相机和包含这样的扫描折叠相机的多相机中的视点像差的方法 |
| CN114270145B (zh) | 2020-07-31 | 2024-05-17 | 核心光电有限公司 | 用于大行程线性位置感测的霍尔传感器-磁体几何结构 |
| CN114236748B (zh) * | 2020-09-09 | 2025-09-09 | 北京小米移动软件有限公司 | 一种光学镜头、摄像头模组及电子设备 |
| US11709347B2 (en) * | 2020-09-24 | 2023-07-25 | Apple Inc. | Folded camera with autofocus and optical image stabilization systems |
| US11328409B2 (en) * | 2020-09-30 | 2022-05-10 | Mitutoyo Corporation | System and method utilizing multi-point autofocus to align an optical axis of an optical assembly portion to be normal to a workpiece surface |
| US11283978B1 (en) * | 2020-10-15 | 2022-03-22 | Asm Technology Singapore Pte Ltd | Aligning lens elements in a lens module relative to an image sensor |
| KR102900180B1 (ko) | 2021-03-09 | 2025-12-12 | 삼성전자주식회사 | 모바일 장치의 카메라 시스템 |
| TWI888016B (zh) | 2021-03-11 | 2025-06-21 | 以色列商核心光電有限公司 | 彈出式照相機系統 |
| CN112987150A (zh) * | 2021-04-21 | 2021-06-18 | 广州立景创新科技有限公司 | 复合棱镜模块以及图像获取模块 |
| CN112987149B (zh) * | 2021-04-21 | 2023-01-20 | 广州立景创新科技有限公司 | 复合棱镜模块以及图像获取模块 |
| EP4180869B1 (en) * | 2021-08-17 | 2026-02-11 | Samsung Electronics Co., Ltd. | Camera module comprising folded optical system |
| KR20230026092A (ko) * | 2021-08-17 | 2023-02-24 | 삼성전자주식회사 | 폴디드 광학계를 포함하는 카메라 모듈 |
| CN113784027B (zh) * | 2021-09-09 | 2023-06-23 | 东莞华贝电子科技有限公司 | 一种潜望式摄像头组件及电子设备 |
| KR20230101318A (ko) * | 2021-12-29 | 2023-07-06 | 삼성전기주식회사 | 카메라 모듈 |
| US20230236393A1 (en) * | 2022-01-10 | 2023-07-27 | Samsung Electronics Co., Ltd. | Camera with tiltable optical field of view changing elements |
| EP4500266A1 (en) | 2022-03-24 | 2025-02-05 | Corephotonics Ltd. | Slim compact lens optical image stabilization |
| EP4492810A4 (en) * | 2022-05-27 | 2025-06-04 | Samsung Electronics Co., Ltd | ELECTRONIC DEVICE WITH CAMERA MODULE AND CONTROL METHOD THEREFOR |
| CN116149047B (zh) * | 2022-12-01 | 2026-04-28 | 湖北久之洋红外系统股份有限公司 | 一种跨介质Snell窗口边缘周视成像光学系统 |
| CN117560556B (zh) * | 2024-01-11 | 2024-05-14 | 杭州海康威视数字技术股份有限公司 | 多目摄像机 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004260787A (ja) * | 2002-09-09 | 2004-09-16 | Rohm Co Ltd | イメージセンサモジュール |
| JP2007033819A (ja) * | 2005-07-26 | 2007-02-08 | Konica Minolta Opto Inc | 撮像光学系、撮像レンズ装置及びデジタル機器 |
| JP2008180808A (ja) * | 2007-01-23 | 2008-08-07 | Funai Electric Co Ltd | ステレオ画像撮像装置 |
| JP2008242446A (ja) * | 2007-02-26 | 2008-10-09 | Hoya Corp | 撮像ユニット及び携帯用電子機器 |
| JP2009049900A (ja) * | 2007-08-22 | 2009-03-05 | Hoya Corp | 撮像装置 |
| US20090153726A1 (en) * | 2007-12-13 | 2009-06-18 | Hae Keun Lim | Camera Module |
| JP2009192581A (ja) * | 2008-02-12 | 2009-08-27 | Konica Minolta Opto Inc | レンズ鏡胴及び撮像装置 |
| WO2010103948A1 (ja) * | 2009-03-10 | 2010-09-16 | コニカミノルタオプト株式会社 | 撮像光学系,撮像光学装置及びデジタル機器 |
| JP2012088374A (ja) * | 2010-10-15 | 2012-05-10 | Hoya Corp | 撮像ユニット |
| JP2013238848A (ja) * | 2012-04-20 | 2013-11-28 | Hoya Corp | 撮像装置 |
Family Cites Families (284)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2112428A1 (de) | 1970-09-09 | 1972-06-08 | Midori Kai Co Ltd | Kamera zur Aufnahme hemisphaerischer Kinobilder |
| US4114171A (en) | 1976-04-06 | 1978-09-12 | Vivitar Corporation | Reflex camera with internal zoom lens |
| US4437745A (en) | 1982-09-30 | 1984-03-20 | Stephen Hajnal | Three dimensional camera system |
| GB8430980D0 (en) | 1984-12-07 | 1985-01-16 | Robinson M | Generation of apparently three-dimensional images |
| US4639586A (en) | 1985-02-06 | 1987-01-27 | The United States Of America As Represented By The Secretary Of The Air Force | Optically phased laser transmitter |
| US4740780A (en) | 1985-06-24 | 1988-04-26 | Gec Avionics, Inc. | Head-up display for automobile |
| US5012273B1 (en) | 1986-05-12 | 1996-10-01 | Asahi Optical Co Ltd | Lens shutter type of camera including zoom lens |
| US6031892A (en) | 1989-12-05 | 2000-02-29 | University Of Massachusetts Medical Center | System for quantitative radiographic imaging |
| US5194959A (en) | 1989-12-21 | 1993-03-16 | Ricoh Company, Ltd. and Nippon Telegraph and Telephone Corporation | Image forming apparatus for forming image corresponding to subject, by dividing optical image corresponding to the subject into plural adjacent optical image parts |
| US5016109A (en) | 1990-07-02 | 1991-05-14 | Bell South Corporation | Apparatus and method for segmenting a field of view into contiguous, non-overlapping, vertical and horizontal sub-fields |
| US5063441A (en) | 1990-10-11 | 1991-11-05 | Stereographics Corporation | Stereoscopic video cameras with image sensors having variable effective position |
| US5142357A (en) | 1990-10-11 | 1992-08-25 | Stereographics Corp. | Stereoscopic video camera with image sensors having variable effective position |
| US5207000A (en) | 1991-06-14 | 1993-05-04 | Industrial Technology Research Institute | Method and apparatus useful for determining an angle between a virtual optical axis and a planar surface |
| US5231461A (en) | 1991-12-09 | 1993-07-27 | Hughes Danbury Optical Systems, Inc. | Solar monochromator for filter calibration |
| US5926411A (en) | 1991-12-30 | 1999-07-20 | Ioptics Incorporated | Optical random access memory |
| US5686960A (en) | 1992-01-14 | 1997-11-11 | Michael Sussman | Image input device having optical deflection elements for capturing multiple sub-images |
| DE4212271C1 (ja) | 1992-04-11 | 1993-07-08 | Deutsche Forschungsanstalt Fuer Luft- Und Raumfahrt E.V., 5300 Bonn, De | |
| US5243413A (en) | 1992-09-02 | 1993-09-07 | At&T Bell Laboratories | Color parallax-free camera and display |
| US5313542A (en) | 1992-11-30 | 1994-05-17 | Breault Research Organization, Inc. | Apparatus and method of rapidly measuring hemispherical scattered or radiated light |
| DE69312257T2 (de) | 1993-02-11 | 1998-01-29 | Agfa Gevaert Nv | Strahlungsfelderkennungsverfahren |
| US5586063A (en) | 1993-09-01 | 1996-12-17 | Hardin; Larry C. | Optical range and speed detection system |
| US5614941A (en) | 1993-11-24 | 1997-03-25 | Hines; Stephen P. | Multi-image autostereoscopic imaging system |
| GB2284273B (en) | 1993-11-29 | 1997-01-08 | Hadland Photonics Limited | Electronic high speed camera incorporating a beam splitter |
| JPH089424A (ja) | 1994-06-20 | 1996-01-12 | Sanyo Electric Co Ltd | 立体画像撮像制御装置 |
| JP3186448B2 (ja) | 1994-08-01 | 2001-07-11 | ミノルタ株式会社 | 立体テレビカメラ |
| JP3458486B2 (ja) | 1994-10-25 | 2003-10-20 | 松下電器産業株式会社 | 全方位撮影装置及び全方位画像合成装置 |
| KR100235343B1 (ko) | 1994-12-29 | 1999-12-15 | 전주범 | 영역분할 기법을 이용한 동영상신호 부호화기의 움직임 벡터 측정장치 |
| JPH08194274A (ja) | 1995-01-13 | 1996-07-30 | Olympus Optical Co Ltd | 立体撮像装置 |
| US5606627A (en) | 1995-01-24 | 1997-02-25 | Eotek Inc. | Automated analytic stereo comparator |
| US5990934A (en) | 1995-04-28 | 1999-11-23 | Lucent Technologies, Inc. | Method and system for panoramic viewing |
| US5745305A (en) | 1995-04-28 | 1998-04-28 | Lucent Technologies Inc. | Panoramic viewing apparatus |
| US5793527A (en) | 1995-06-30 | 1998-08-11 | Lucent Technologies Inc. | High resolution viewing system |
| US5539483A (en) | 1995-06-30 | 1996-07-23 | At&T Corp. | Panoramic projection apparatus |
| US5903306A (en) | 1995-08-16 | 1999-05-11 | Westinghouse Savannah River Company | Constrained space camera assembly |
| US6115176A (en) | 1995-11-30 | 2000-09-05 | Lucent Technologies Inc. | Spherical viewing/projection apparatus |
| US6111702A (en) | 1995-11-30 | 2000-08-29 | Lucent Technologies Inc. | Panoramic viewing system with offset virtual optical centers |
| US6141034A (en) | 1995-12-15 | 2000-10-31 | Immersive Media Co. | Immersive imaging method and apparatus |
| US5640222A (en) | 1996-03-15 | 1997-06-17 | Paul; Eddie | Method and apparatus for producing stereoscopic images |
| US6850279B1 (en) | 1996-06-18 | 2005-02-01 | Sony Corporation | Optical image recording system, and associated processing system |
| US5721585A (en) | 1996-08-08 | 1998-02-24 | Keast; Jeffrey D. | Digital video panoramic image capture and display system |
| JPH10142490A (ja) | 1996-11-15 | 1998-05-29 | Canon Inc | 環境認識装置及びカメラ |
| AU6515798A (en) | 1997-04-16 | 1998-11-11 | Isight Ltd. | Video teleconferencing |
| US7028899B2 (en) | 1999-06-07 | 2006-04-18 | Metrologic Instruments, Inc. | Method of speckle-noise pattern reduction and apparatus therefore based on reducing the temporal-coherence of the planar laser illumination beam before it illuminates the target object by applying temporal phase modulation techniques during the transmission of the plib towards the target |
| DE19903807A1 (de) | 1998-05-05 | 1999-11-11 | Zeiss Carl Fa | Beleuchtungssystem insbesondere für die EUV-Lithographie |
| US6141145A (en) | 1998-08-28 | 2000-10-31 | Lucent Technologies | Stereo panoramic viewing system |
| US6128143A (en) | 1998-08-28 | 2000-10-03 | Lucent Technologies Inc. | Panoramic viewing system with support stand |
| US6285365B1 (en) | 1998-08-28 | 2001-09-04 | Fullview, Inc. | Icon referenced panoramic image display |
| US6144501A (en) | 1998-08-28 | 2000-11-07 | Lucent Technologies Inc. | Split mirrored panoramic image display |
| US6195204B1 (en) | 1998-08-28 | 2001-02-27 | Lucent Technologies Inc. | Compact high resolution panoramic viewing system |
| US6992700B1 (en) | 1998-09-08 | 2006-01-31 | Ricoh Company, Ltd. | Apparatus for correction based upon detecting a camera shaking |
| US7271803B2 (en) | 1999-01-08 | 2007-09-18 | Ricoh Company, Ltd. | Method and system for simulating stereographic vision |
| US6611289B1 (en) | 1999-01-15 | 2003-08-26 | Yanbin Yu | Digital cameras using multiple sensors with multiple lenses |
| US7015954B1 (en) | 1999-08-09 | 2006-03-21 | Fuji Xerox Co., Ltd. | Automatic video system using multiple cameras |
| JP3587506B2 (ja) | 1999-08-30 | 2004-11-10 | 富士重工業株式会社 | ステレオカメラの調整装置 |
| GB2354389A (en) | 1999-09-15 | 2001-03-21 | Sharp Kk | Stereo images with comfortable perceived depth |
| GB2354390A (en) | 1999-09-16 | 2001-03-21 | Ibm | Wide-angle image capture apparatus |
| US6650774B1 (en) | 1999-10-01 | 2003-11-18 | Microsoft Corporation | Locally adapted histogram equalization |
| US6862364B1 (en) | 1999-10-27 | 2005-03-01 | Canon Kabushiki Kaisha | Stereo image processing for radiography |
| US6782137B1 (en) | 1999-11-24 | 2004-08-24 | General Electric Company | Digital image display improvement system and method |
| JP2001194114A (ja) | 2000-01-14 | 2001-07-19 | Sony Corp | 画像処理装置および画像処理方法、並びにプログラム提供媒体 |
| JP2001209037A (ja) | 2000-01-26 | 2001-08-03 | Olympus Optical Co Ltd | 可変ホログラム素子及びそれらを用いた光学装置 |
| US6823021B1 (en) | 2000-10-27 | 2004-11-23 | Greenwich Technologies Associates | Method and apparatus for space division multiple access receiver |
| US6701081B1 (en) | 2000-06-06 | 2004-03-02 | Air Controls, Inc. | Dual camera mount for stereo imaging |
| US6768509B1 (en) | 2000-06-12 | 2004-07-27 | Intel Corporation | Method and apparatus for determining points of interest on an image of a camera calibration object |
| AU2002226873A1 (en) | 2000-07-14 | 2002-04-08 | Applied Wdm, Inc. | Optical waveguide transmission devices |
| JP2002040584A (ja) | 2000-07-28 | 2002-02-06 | Hamamatsu Photonics Kk | 高速撮像カメラ |
| IL139995A (en) | 2000-11-29 | 2007-07-24 | Rvc Llc | System and method for spherical stereoscopic photographing |
| EP1231780A3 (en) | 2001-02-07 | 2004-01-14 | Sony Corporation | Image pickup apparatus |
| JP2002277736A (ja) | 2001-03-21 | 2002-09-25 | Olympus Optical Co Ltd | 撮像装置 |
| US6421185B1 (en) | 2001-04-16 | 2002-07-16 | The United States Of America As Represented By The Secretary Of The Air Force | Wide field-of-view imaging system using a spatial light modulator |
| US6628897B2 (en) | 2001-06-20 | 2003-09-30 | Sony Corporation | Camera system |
| EP1427191A4 (en) | 2001-08-17 | 2006-08-16 | Sony Corp | PICTURE SETUP |
| US20030038814A1 (en) | 2001-08-27 | 2003-02-27 | Blume Leo R. | Virtual camera system for environment capture |
| US7116351B2 (en) | 2001-10-29 | 2006-10-03 | Sony Corporation | Imaging device |
| JP4198449B2 (ja) | 2002-02-22 | 2008-12-17 | 富士フイルム株式会社 | デジタルカメラ |
| JP2003260025A (ja) * | 2002-03-08 | 2003-09-16 | Olympus Optical Co Ltd | カプセル型内視鏡 |
| US6768598B2 (en) | 2002-04-02 | 2004-07-27 | Sony Corporation | Image pickup system |
| US6861633B2 (en) | 2002-06-20 | 2005-03-01 | The Aerospace Corporation | Microelectromechanical system optical sensor providing bit image data of a viewed image |
| US7298392B2 (en) | 2003-06-26 | 2007-11-20 | Microsoft Corp. | Omni-directional camera design for video conferencing |
| US7209161B2 (en) | 2002-07-15 | 2007-04-24 | The Boeing Company | Method and apparatus for aligning a pair of digital cameras forming a three dimensional image to compensate for a physical misalignment of cameras |
| US7602969B2 (en) | 2002-07-18 | 2009-10-13 | Sony Corporation | Imaging data processing method, imaging data processing device, and computer program |
| JP2004072349A (ja) | 2002-08-05 | 2004-03-04 | Canon Inc | 撮像装置、及びその制御方法 |
| US7893957B2 (en) | 2002-08-28 | 2011-02-22 | Visual Intelligence, LP | Retinal array compound camera system |
| US7084904B2 (en) | 2002-09-30 | 2006-08-01 | Microsoft Corporation | Foveated wide-angle imaging system and method for capturing and viewing wide-angle images in real time |
| AU2003302166A1 (en) | 2003-01-02 | 2004-07-29 | Covi Technologies, Inc. | Optical block assembly |
| US6933493B2 (en) | 2003-04-07 | 2005-08-23 | Kingpak Technology Inc. | Image sensor having a photosensitive chip mounted to a metal sheet |
| IL155525A0 (en) | 2003-04-21 | 2009-02-11 | Yaron Mayer | System and method for 3d photography and/or analysis of 3d images and/or display of 3d images |
| JP3709879B2 (ja) | 2003-05-01 | 2005-10-26 | 日産自動車株式会社 | ステレオ画像処理装置 |
| US7463280B2 (en) | 2003-06-03 | 2008-12-09 | Steuart Iii Leonard P | Digital 3D/360 degree camera system |
| CN1802583A (zh) | 2003-06-09 | 2006-07-12 | 奥林巴斯株式会社 | 可变镜 |
| US6809887B1 (en) | 2003-06-13 | 2004-10-26 | Vision Technologies, Inc | Apparatus and method for acquiring uniform-resolution panoramic images |
| US7495694B2 (en) | 2004-07-28 | 2009-02-24 | Microsoft Corp. | Omni-directional camera with calibration and up look angle improvements |
| US7336299B2 (en) | 2003-07-03 | 2008-02-26 | Physical Optics Corporation | Panoramic video system with real-time distortion-free imaging |
| KR100541028B1 (ko) | 2003-07-21 | 2006-01-11 | 주식회사 옵토메카 | 이미지 센서 및 그 제조 방법 |
| US20050057659A1 (en) | 2003-09-16 | 2005-03-17 | Takami Hasegawa | Camera image shake correcting device |
| US7028546B2 (en) | 2003-10-21 | 2006-04-18 | Instrumented Sensor Technology, Inc. | Data recorder |
| US20050111106A1 (en) | 2003-10-31 | 2005-05-26 | Kazuhiro Matsumoto | Optical element assembly formed of multiple optical elements such as prisms, and image pickup apparatus using the same in image pickup function section |
| EP1720045A4 (en) | 2004-02-19 | 2009-11-11 | Canon Kk | OPTICAL EQUIPMENT AND BEAM SPREADER |
| US20050185711A1 (en) | 2004-02-20 | 2005-08-25 | Hanspeter Pfister | 3D television system and method |
| GB0406730D0 (en) * | 2004-03-25 | 2004-04-28 | 1 Ltd | Focussing method |
| US7593057B2 (en) | 2004-07-28 | 2009-09-22 | Microsoft Corp. | Multi-view integrated camera system with housing |
| KR20070064319A (ko) | 2004-08-06 | 2007-06-20 | 유니버시티 오브 워싱톤 | 가변 응시 시거리 주사 광 디스플레이 |
| EP1812968B1 (en) | 2004-08-25 | 2019-01-16 | Callahan Cellular L.L.C. | Apparatus for multiple camera devices and method of operating same |
| US7039292B1 (en) | 2004-09-09 | 2006-05-02 | Rockwell Collins, Inc. | Optical system for vehicle flight control |
| DE102004045430A1 (de) | 2004-09-18 | 2006-05-18 | Deutsche Telekom Ag | Vorrichtung zur Bildstabilisierung |
| JP3791847B1 (ja) | 2005-08-10 | 2006-06-28 | 京セラ株式会社 | カメラモジュールおよび該カメラモジュールを搭載した情報端末 |
| EP2357527B1 (en) | 2004-11-15 | 2012-10-17 | Hitachi Ltd. | Stereo camera having two imaging elements mounted on a common stay |
| US7372996B2 (en) | 2004-12-27 | 2008-05-13 | Trw Automotive U.S. Llc | Method and apparatus for determining the position of a vehicle seat |
| WO2006075528A1 (ja) | 2005-01-13 | 2006-07-20 | National University Corporation NARA Institute of Science and Technology | 3次元オブジェクト計測装置 |
| US7512262B2 (en) | 2005-02-25 | 2009-03-31 | Microsoft Corporation | Stereo-based image processing |
| US20060215054A1 (en) | 2005-03-23 | 2006-09-28 | Eastman Kodak Company | Wide angle camera with prism array |
| JP4177826B2 (ja) | 2005-03-23 | 2008-11-05 | 株式会社東芝 | 画像処理装置および画像処理方法 |
| JP2006279538A (ja) | 2005-03-29 | 2006-10-12 | Sony Corp | 撮像装置 |
| US20060238441A1 (en) | 2005-04-25 | 2006-10-26 | The Boeing Company | Method and apparatus for displaying a stereoscopic image |
| US20070102622A1 (en) | 2005-07-01 | 2007-05-10 | Olsen Richard I | Apparatus for multiple camera devices and method of operating same |
| US20090268983A1 (en) | 2005-07-25 | 2009-10-29 | The Regents Of The University Of California | Digital imaging system and method using multiple digital image sensors to produce large high-resolution gapless mosaic images |
| JP2007081473A (ja) | 2005-09-09 | 2007-03-29 | Eastman Kodak Co | 複数光学系を有する撮像装置 |
| TW200721803A (en) | 2005-10-17 | 2007-06-01 | Via Tech Inc | 3-D stereoscopic image display system |
| US20070164202A1 (en) | 2005-11-16 | 2007-07-19 | Wurz David A | Large depth of field line scan camera |
| JP4979928B2 (ja) | 2005-11-28 | 2012-07-18 | 株式会社トプコン | 三次元形状演算装置及び三次元形状演算方法 |
| US8059185B2 (en) | 2005-12-28 | 2011-11-15 | Canon Kabushiki Kaisha | Photographing apparatus, image display method, computer program and storage medium for acquiring a photographed image in a wide range |
| US7215479B1 (en) | 2006-02-10 | 2007-05-08 | Micron Technology, Inc. | Integrated lens system for image sensor and method for manufacturing the same |
| GB2435360B (en) | 2006-02-16 | 2009-09-23 | Imagination Tech Ltd | Method and apparatus for determining motion between video images |
| JP4844177B2 (ja) | 2006-03-07 | 2011-12-28 | 株式会社ニコン | ブレ補正装置及びカメラ |
| JP2007274542A (ja) | 2006-03-31 | 2007-10-18 | Sony Corp | 撮像装置および携帯電話機 |
| CN101055342A (zh) | 2006-04-12 | 2007-10-17 | 鸿富锦精密工业(深圳)有限公司 | 自动对焦镜头模组 |
| US8433157B2 (en) | 2006-05-04 | 2013-04-30 | Thomson Licensing | System and method for three-dimensional object reconstruction from two-dimensional images |
| EP2016759A1 (en) | 2006-05-05 | 2009-01-21 | Nokia Corporation | Optical image recording device with small height and high resolution |
| WO2007129477A1 (ja) | 2006-05-09 | 2007-11-15 | Sega Corporation | 画像処理装置および画像処理プログラム |
| JP4972779B2 (ja) | 2006-05-30 | 2012-07-11 | コニカミノルタアドバンストレイヤー株式会社 | 光学ユニットおよび撮像装置 |
| JP5067021B2 (ja) | 2006-06-01 | 2012-11-07 | 富士ゼロックス株式会社 | 画像形成装置、画像形成装置の組立方法及び解体方法並びに画像形成装置に用いられる仮止め部材 |
| JP4851239B2 (ja) | 2006-06-05 | 2012-01-11 | 株式会社トプコン | 画像処理装置及びその処理方法 |
| JP2008048293A (ja) | 2006-08-18 | 2008-02-28 | Kyocera Corp | 撮像装置、およびその製造方法 |
| US20080058629A1 (en) | 2006-08-21 | 2008-03-06 | University Of Washington | Optical fiber scope with both non-resonant illumination and resonant collection/imaging for multiple modes of operation |
| DE102006044786A1 (de) | 2006-09-14 | 2008-03-27 | Schefenacker Vision Systems Germany Gmbh | Kamerasystem, Verfahren zum Betreiben eines Kamerasystems und Sensoreinrichtung eines Kamerasystems |
| EP1912098B1 (en) | 2006-10-12 | 2012-04-25 | Carl Zeiss SMT GmbH | Unit magnification projection objective |
| US7817354B2 (en) | 2006-10-25 | 2010-10-19 | Capsovision Inc. | Panoramic imaging system |
| JP5040493B2 (ja) | 2006-12-04 | 2012-10-03 | ソニー株式会社 | 撮像装置及び撮像方法 |
| KR100821480B1 (ko) * | 2006-12-22 | 2008-04-11 | 동부일렉트로닉스 주식회사 | 이미지 센서 및 그의 제조방법 |
| KR100866491B1 (ko) | 2007-01-30 | 2008-11-03 | 삼성전자주식회사 | 영상 처리 방법 및 장치 |
| US7683962B2 (en) | 2007-03-09 | 2010-03-23 | Eastman Kodak Company | Camera using multiple lenses and image sensors in a rangefinder configuration to provide a range map |
| US8356035B1 (en) | 2007-04-10 | 2013-01-15 | Google Inc. | Association of terms with images using image similarity |
| JP4582423B2 (ja) | 2007-04-20 | 2010-11-17 | 富士フイルム株式会社 | 撮像装置、画像処理装置、撮像方法、及び画像処理方法 |
| JP5013078B2 (ja) | 2007-04-24 | 2012-08-29 | コニカミノルタアドバンストレイヤー株式会社 | レンズ鏡胴及び撮像装置 |
| US20080290435A1 (en) | 2007-05-21 | 2008-11-27 | Micron Technology, Inc. | Wafer level lens arrays for image sensor packages and the like, image sensor packages, and related methods |
| JP2008294819A (ja) | 2007-05-25 | 2008-12-04 | Sony Corp | 撮像装置 |
| US7860214B1 (en) | 2007-06-13 | 2010-12-28 | The United States Of America As Represented By Secretary Of Agriculture | Correction of x-ray images |
| US20090005112A1 (en) | 2007-06-29 | 2009-01-01 | Samsung Electronics Co., Ltd. | Optical imaging system configurations for handheld devices |
| US20090003646A1 (en) | 2007-06-29 | 2009-01-01 | The Hong Kong University Of Science And Technology | Lossless visible watermarking |
| JPWO2009011153A1 (ja) | 2007-07-13 | 2010-09-16 | 三菱電機株式会社 | 画像読取装置 |
| JP4900118B2 (ja) | 2007-07-31 | 2012-03-21 | コニカミノルタオプト株式会社 | カメラモジュールおよび電子機器 |
| TWI383666B (zh) | 2007-08-21 | 2013-01-21 | Sony Taiwan Ltd | 多重鏡頭相機系統之先進式動態接圖方法 |
| US7973834B2 (en) | 2007-09-24 | 2011-07-05 | Jianwen Yang | Electro-optical foveated imaging and tracking system |
| KR20090032261A (ko) | 2007-09-27 | 2009-04-01 | 삼성전자주식회사 | 움직임 추정에 기초하여 움직임 보상을 수행하는 영상 처리장치 및 그 방법 |
| JP5152483B2 (ja) | 2007-10-05 | 2013-02-27 | ソニー株式会社 | 撮像装置 |
| EP2208354A4 (en) | 2007-10-10 | 2010-12-22 | Gerard Dirk Smits | IMAGE PROJECTOR WITH REFLECTIVE LIGHT TRACKING |
| KR101484487B1 (ko) | 2007-10-11 | 2015-01-28 | 코닌클리케 필립스 엔.브이. | 깊이-맵을 프로세싱하는 방법 및 디바이스 |
| US20100259655A1 (en) | 2007-11-01 | 2010-10-14 | Konica Minolta Holdings, Inc. | Imaging device |
| KR100927347B1 (ko) | 2007-11-13 | 2009-11-24 | 파워옵틱스 주식회사 | 줌렌즈 광학계 |
| JP4831514B2 (ja) | 2007-11-13 | 2011-12-07 | 独立行政法人情報通信研究機構 | 設定パラメータ最適化装置およびそのプログラム |
| US8791984B2 (en) | 2007-11-16 | 2014-07-29 | Scallop Imaging, Llc | Digital security camera |
| US9118850B2 (en) * | 2007-11-27 | 2015-08-25 | Capso Vision, Inc. | Camera system with multiple pixel arrays on a chip |
| CN100465699C (zh) | 2007-12-05 | 2009-03-04 | 浙江大学 | 利用棱镜分光渐晕补偿实现多ccd无缝拼接的光电系统 |
| US8300086B2 (en) | 2007-12-20 | 2012-10-30 | Nokia Corporation | Image processing for supporting a stereoscopic presentation |
| US20090185067A1 (en) | 2007-12-21 | 2009-07-23 | Stereo Display, Inc. | Compact automatic focusing camera |
| CN103033922A (zh) | 2008-01-02 | 2013-04-10 | 加利福尼亚大学董事会 | 高数值孔径远程显微镜设备 |
| US7978222B2 (en) | 2008-03-01 | 2011-07-12 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | Systems and methods for image stabilization |
| WO2009111642A1 (en) | 2008-03-05 | 2009-09-11 | Contrast Optical Design & Engineering, Inc. | Multiple image camera and lens system |
| JPWO2009119370A1 (ja) | 2008-03-26 | 2011-07-21 | コニカミノルタオプト株式会社 | 撮像装置 |
| JP5786149B2 (ja) | 2008-03-28 | 2015-09-30 | ザ トラスティーズ オブ コロンビア ユニヴァーシティ イン ザ シティ オブ ニューヨーク | 汎用的に詰め合わせたピクセル配列のカメラシステムおよび方法 |
| CN101571666A (zh) | 2008-04-28 | 2009-11-04 | 鸿富锦精密工业(深圳)有限公司 | 成像设备 |
| US8280194B2 (en) | 2008-04-29 | 2012-10-02 | Sony Corporation | Reduced hardware implementation for a two-picture depth map algorithm |
| US9001187B2 (en) | 2009-05-11 | 2015-04-07 | CapsoVision, Inc. | Capsule imaging system having a folded optical axis |
| US9171221B2 (en) | 2010-07-18 | 2015-10-27 | Spatial Cam Llc | Camera to track an object |
| JP4435867B2 (ja) | 2008-06-02 | 2010-03-24 | パナソニック株式会社 | 法線情報を生成する画像処理装置、方法、コンピュータプログラム、および、視点変換画像生成装置 |
| JP5223486B2 (ja) | 2008-06-18 | 2013-06-26 | ソニー株式会社 | 電子双眼鏡 |
| JP5096496B2 (ja) | 2008-07-24 | 2012-12-12 | パナソニック株式会社 | カメラ駆動装置 |
| JP2010041381A (ja) | 2008-08-05 | 2010-02-18 | Nikon Corp | 電子カメラ、ステレオ画像生成方法およびステレオ画像生成システム |
| KR100942925B1 (ko) | 2008-08-11 | 2010-02-22 | 한국전자통신연구원 | 스테레오 비전 시스템 및 그 제어방법 |
| CN102177468A (zh) | 2008-08-14 | 2011-09-07 | 远程保真公司 | 三反射镜全景相机 |
| TWI419551B (zh) | 2008-08-22 | 2013-12-11 | 固態全景影像擷取裝置 | |
| JP2010067014A (ja) | 2008-09-11 | 2010-03-25 | Ricoh Co Ltd | 画像分類装置及び画像分類方法 |
| CN102165496B (zh) | 2008-09-25 | 2014-08-13 | 皇家飞利浦电子股份有限公司 | 三维图像数据处理 |
| US8571399B2 (en) | 2008-10-14 | 2013-10-29 | Nidec Sankyo Corporation | Photographic optical device |
| US8267601B2 (en) | 2008-11-04 | 2012-09-18 | James Cameron | Platform for stereoscopy for hand-held film/video camera stabilizers |
| JP4852591B2 (ja) | 2008-11-27 | 2012-01-11 | 富士フイルム株式会社 | 立体画像処理装置、方法及び記録媒体並びに立体撮像装置 |
| CN101770059B (zh) | 2008-12-27 | 2012-06-20 | 鸿富锦精密工业(深圳)有限公司 | 相机模组 |
| US9395617B2 (en) | 2009-01-05 | 2016-07-19 | Applied Quantum Technologies, Inc. | Panoramic multi-scale imager and method therefor |
| US8326036B2 (en) | 2009-02-20 | 2012-12-04 | Qylur Security Systems, Inc. | Automated image separation method |
| GB0903689D0 (en) | 2009-03-03 | 2009-04-15 | Sigmavision Ltd | Vehicle tyre measurement |
| JP5316118B2 (ja) | 2009-03-12 | 2013-10-16 | オムロン株式会社 | 3次元視覚センサ |
| US20100265313A1 (en) | 2009-04-17 | 2010-10-21 | Sony Corporation | In-camera generation of high quality composite panoramic images |
| US20100278423A1 (en) | 2009-04-30 | 2010-11-04 | Yuji Itoh | Methods and systems for contrast enhancement |
| US8503778B2 (en) | 2009-05-14 | 2013-08-06 | National University Of Singapore | Enhancing photograph visual quality using texture and contrast data from near infra-red images |
| US8170408B2 (en) | 2009-05-18 | 2012-05-01 | Invensense, Inc. | Optical image stabilization in a digital still camera or handset |
| US8194170B2 (en) | 2009-06-02 | 2012-06-05 | Algonquin College | Axicon lens array |
| US9124874B2 (en) | 2009-06-05 | 2015-09-01 | Qualcomm Incorporated | Encoding of three-dimensional conversion information with two-dimensional video sequence |
| US8405750B2 (en) | 2009-06-08 | 2013-03-26 | Aptina Imaging Corporation | Image sensors and image reconstruction methods for capturing high dynamic range images |
| US9479768B2 (en) | 2009-06-09 | 2016-10-25 | Bartholomew Garibaldi Yukich | Systems and methods for creating three-dimensional image media |
| CN101581828B (zh) | 2009-06-09 | 2011-06-22 | 苏州大学 | 环形孔径超薄光学成像系统 |
| JP5293463B2 (ja) * | 2009-07-09 | 2013-09-18 | ソニー株式会社 | 画像処理装置、画像処理方法およびプログラム |
| US8228417B1 (en) | 2009-07-15 | 2012-07-24 | Adobe Systems Incorporated | Focused plenoptic camera employing different apertures or filtering at different microlenses |
| JP5450200B2 (ja) | 2009-07-17 | 2014-03-26 | 富士フイルム株式会社 | 撮像装置、方法およびプログラム |
| TWI389559B (zh) | 2009-08-14 | 2013-03-11 | Ind Tech Res Inst | 前景影像分離方法 |
| US8294073B1 (en) | 2009-10-01 | 2012-10-23 | Raytheon Company | High angular rate imaging system and related techniques |
| US9063345B2 (en) | 2009-10-19 | 2015-06-23 | Pixar | Super light-field lens with doublet lenslet array element |
| JP5539818B2 (ja) | 2009-10-20 | 2014-07-02 | 富士フイルム株式会社 | 撮像レンズおよび撮像装置 |
| US8325187B2 (en) | 2009-10-22 | 2012-12-04 | Samsung Electronics Co., Ltd. | Method and device for real time 3D navigation in panoramic images and cylindrical spaces |
| US8457398B2 (en) | 2009-10-27 | 2013-06-04 | Himax Media Solutions, Inc. | Image enhancement method and apparatuses utilizing the same |
| EP2502115A4 (en) | 2009-11-20 | 2013-11-06 | Pelican Imaging Corp | RECORDING AND PROCESSING IMAGES THROUGH A MONOLITHIC CAMERA ARRAY WITH HETEROGENIC IMAGE CONVERTER |
| US8497934B2 (en) | 2009-11-25 | 2013-07-30 | Massachusetts Institute Of Technology | Actively addressable aperture light field camera |
| US8400555B1 (en) | 2009-12-01 | 2013-03-19 | Adobe Systems Incorporated | Focused plenoptic camera employing microlenses with different focal lengths |
| WO2011081646A1 (en) | 2009-12-15 | 2011-07-07 | Thomson Licensing | Stereo-image quality and disparity/depth indications |
| US8442392B2 (en) | 2009-12-22 | 2013-05-14 | Nokia Corporation | Method and apparatus for operating the automatic focus or the optical imaging stabilizing system |
| US20110213664A1 (en) | 2010-02-28 | 2011-09-01 | Osterhout Group, Inc. | Local advertising content on an interactive head-mounted eyepiece |
| US9128281B2 (en) | 2010-09-14 | 2015-09-08 | Microsoft Technology Licensing, Llc | Eyepiece with uniformly illuminated reflective display |
| WO2011132364A1 (ja) | 2010-04-19 | 2011-10-27 | パナソニック株式会社 | 立体画像撮影装置および立体画像撮影方法 |
| JP5593118B2 (ja) | 2010-04-30 | 2014-09-17 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット |
| WO2011155318A1 (ja) | 2010-06-08 | 2011-12-15 | 日本電産サンキョー株式会社 | 振れ補正装置、撮影用光学装置およびレンズ駆動装置 |
| JP5622443B2 (ja) | 2010-06-08 | 2014-11-12 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット |
| JP5138734B2 (ja) | 2010-06-15 | 2013-02-06 | シャープ株式会社 | 撮像レンズ、および撮像モジュール |
| CN101902657B (zh) | 2010-07-16 | 2011-12-21 | 浙江大学 | 一种基于深度图分层的虚拟多视点图像的生成方法 |
| US9485495B2 (en) | 2010-08-09 | 2016-11-01 | Qualcomm Incorporated | Autofocus for stereo images |
| TWI409577B (zh) | 2010-08-20 | 2013-09-21 | Primax Electronics Ltd | 光學影像系統 |
| US20120056987A1 (en) | 2010-09-03 | 2012-03-08 | Luke Fedoroff | 3d camera system and method |
| JP5392415B2 (ja) | 2010-09-22 | 2014-01-22 | 富士通株式会社 | ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム |
| CN103339918B (zh) | 2010-10-01 | 2016-05-04 | 康泰克斯有限公司 | 图像传感器的信号强度匹配 |
| US9317761B2 (en) | 2010-12-09 | 2016-04-19 | Nanyang Technological University | Method and an apparatus for determining vein patterns from a colour image |
| JP5716465B2 (ja) | 2011-03-09 | 2015-05-13 | ソニー株式会社 | 撮像装置 |
| US9197798B2 (en) | 2011-03-25 | 2015-11-24 | Adobe Systems Incorporated | Thin plenoptic cameras using microspheres |
| US9172856B2 (en) | 2011-03-29 | 2015-10-27 | Microsoft Technology Licensing, Llc | Folded imaging path camera |
| US8928988B1 (en) | 2011-04-01 | 2015-01-06 | The Regents Of The University Of California | Monocentric imaging |
| WO2012136388A1 (en) | 2011-04-08 | 2012-10-11 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Capturing panoramic or semi-panoramic 3d scenes |
| US20120293607A1 (en) | 2011-05-17 | 2012-11-22 | Apple Inc. | Panorama Processing |
| US9390530B2 (en) | 2011-05-27 | 2016-07-12 | Nokia Technologies Oy | Image stitching |
| EP2721828B1 (en) | 2011-06-15 | 2015-07-15 | Microsoft Technology Licensing, LLC | High resolution multispectral image capture |
| TWI507807B (zh) | 2011-06-24 | 2015-11-11 | Mstar Semiconductor Inc | 自動對焦方法與裝置 |
| US20130265459A1 (en) | 2011-06-28 | 2013-10-10 | Pelican Imaging Corporation | Optical arrangements for use with an array camera |
| US8896890B2 (en) | 2011-06-30 | 2014-11-25 | Lexmark International, Inc. | Image capture system having a folded optical path |
| JP5848052B2 (ja) | 2011-07-21 | 2016-01-27 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット |
| US8784301B2 (en) | 2011-08-12 | 2014-07-22 | Intuitive Surgical Operations, Inc. | Image capture unit and method with an extended depth of field |
| US8988564B2 (en) | 2011-09-09 | 2015-03-24 | Apple Inc. | Digital camera with light splitter |
| US9438889B2 (en) | 2011-09-21 | 2016-09-06 | Qualcomm Incorporated | System and method for improving methods of manufacturing stereoscopic image sensors |
| US8855476B2 (en) | 2011-09-28 | 2014-10-07 | DigitalOptics Corporation MEMS | MEMS-based optical image stabilization |
| WO2013059399A1 (en) | 2011-10-20 | 2013-04-25 | Monsanto Technology Llc | Plant stand counter |
| US9692991B2 (en) | 2011-11-04 | 2017-06-27 | Qualcomm Incorporated | Multispectral imaging system |
| US8582220B2 (en) * | 2011-12-05 | 2013-11-12 | Himax Technologies Limited | Lens module |
| CN202405984U (zh) | 2011-12-10 | 2012-08-29 | 东莞市旭业光电科技有限公司 | 一种用于音圈马达的垫片 |
| KR101975893B1 (ko) | 2012-03-21 | 2019-09-10 | 엘지이노텍 주식회사 | 카메라 모듈 |
| US9210405B2 (en) | 2012-03-22 | 2015-12-08 | Qualcomm Technologies, Inc. | System and method for real time 2D to 3D conversion of video in a digital camera |
| KR101818778B1 (ko) | 2012-03-23 | 2018-01-16 | 한국전자통신연구원 | 실감 파노라마 영상 생성을 위한 3d 데이터 포맷 생성/소비 장치 및 방법 |
| US20130260823A1 (en) | 2012-03-31 | 2013-10-03 | Ashutosh Y. Shukla | Compact Portable Electronic Device Having Augmented Back Volume for Speaker |
| NL2008639C2 (en) | 2012-04-13 | 2013-10-16 | Cyclomedia Technology B V | Device, system and vehicle for recording panoramic images, and a device and method for panoramic projection thereof. |
| EP2677734A3 (en) | 2012-06-18 | 2016-01-13 | Sony Mobile Communications AB | Array camera imaging system and method |
| EP2677733A3 (en) | 2012-06-18 | 2015-12-09 | Sony Mobile Communications AB | Array camera imaging system and method |
| US9134503B2 (en) | 2012-07-06 | 2015-09-15 | Apple Inc. | VCM OIS actuator module |
| WO2014012603A1 (en) | 2012-07-17 | 2014-01-23 | Heptagon Micro Optics Pte. Ltd. | Optical devices, in particular computational cameras, and methods for manufacturing the same |
| EP2748792B1 (en) | 2012-08-08 | 2016-12-21 | Dolby Laboratories Licensing Corporation | Image processing for hdr images |
| US9398264B2 (en) | 2012-10-19 | 2016-07-19 | Qualcomm Incorporated | Multi-camera system using folded optics |
| JP2014112302A (ja) | 2012-12-05 | 2014-06-19 | Ricoh Co Ltd | 所定領域管理システム、通信方法、及びプログラム |
| US9857470B2 (en) | 2012-12-28 | 2018-01-02 | Microsoft Technology Licensing, Llc | Using photometric stereo for 3D environment modeling |
| US9568713B2 (en) | 2013-01-05 | 2017-02-14 | Light Labs Inc. | Methods and apparatus for using multiple optical chains in parallel to support separate color-capture |
| US9171355B2 (en) | 2013-04-12 | 2015-10-27 | Qualcomm Incorporated | Near infrared guided image denoising |
| JP2015036716A (ja) | 2013-08-12 | 2015-02-23 | ソニー株式会社 | 像ぶれ補正装置及び撮像装置 |
| US10178373B2 (en) | 2013-08-16 | 2019-01-08 | Qualcomm Incorporated | Stereo yaw correction using autofocus feedback |
| EP2860699A1 (en) | 2013-10-11 | 2015-04-15 | Telefonaktiebolaget L M Ericsson (Publ) | Technique for view synthesis |
| US9223118B2 (en) | 2013-10-31 | 2015-12-29 | Apple Inc. | Small form factor telephoto camera |
| CN203745777U (zh) | 2014-01-10 | 2014-07-30 | 瑞声声学科技(深圳)有限公司 | 阵列式镜头装置 |
| US10015391B2 (en) | 2014-02-13 | 2018-07-03 | Sony Mobile Communications Inc. | Method and system for adjusting camera settings using corneal reflection |
| US9557627B2 (en) | 2014-03-07 | 2017-01-31 | Apple Inc. | Folded camera lens systems |
| US9316810B2 (en) | 2014-03-07 | 2016-04-19 | Apple Inc. | Folded telephoto camera lens system |
| US9383550B2 (en) | 2014-04-04 | 2016-07-05 | Qualcomm Incorporated | Auto-focus in low-profile folded optics multi-camera system |
| US9374516B2 (en) | 2014-04-04 | 2016-06-21 | Qualcomm Incorporated | Auto-focus in low-profile folded optics multi-camera system |
| US10013764B2 (en) | 2014-06-19 | 2018-07-03 | Qualcomm Incorporated | Local adaptive histogram equalization |
| US20150373269A1 (en) | 2014-06-20 | 2015-12-24 | Qualcomm Incorporated | Parallax free thin multi-camera system capable of capturing full wide field of view images |
| US9386222B2 (en) | 2014-06-20 | 2016-07-05 | Qualcomm Incorporated | Multi-camera system using folded optics free from parallax artifacts |
| US9549107B2 (en) | 2014-06-20 | 2017-01-17 | Qualcomm Incorporated | Autofocus for folded optic array cameras |
| US9294672B2 (en) | 2014-06-20 | 2016-03-22 | Qualcomm Incorporated | Multi-camera system using folded optics free from parallax and tilt artifacts |
| US9541740B2 (en) | 2014-06-20 | 2017-01-10 | Qualcomm Incorporated | Folded optic array camera using refractive prisms |
| US9819863B2 (en) | 2014-06-20 | 2017-11-14 | Qualcomm Incorporated | Wide field of view array camera for hemispheric and spherical imaging |
| US9832381B2 (en) | 2014-10-31 | 2017-11-28 | Qualcomm Incorporated | Optical image stabilization for thin cameras |
| US10334158B2 (en) | 2014-11-03 | 2019-06-25 | Robert John Gove | Autonomous media capturing |
| US10070055B2 (en) | 2015-03-25 | 2018-09-04 | Massachusetts Institute Of Technology | Devices and methods for optically multiplexed imaging |
| US20170038502A1 (en) | 2015-08-06 | 2017-02-09 | Qualcomm Incorporated | Methods and apparatus having a two-surface microlens array for low f-number plenoptic cameras |
-
2014
- 2014-10-28 US US14/526,104 patent/US9374516B2/en active Active
-
2015
- 2015-03-24 CN CN201580017026.XA patent/CN106164766B/zh active Active
- 2015-03-24 BR BR112016023168-6A patent/BR112016023168B1/pt active IP Right Grant
- 2015-03-24 KR KR1020167030653A patent/KR20160140905A/ko not_active Abandoned
- 2015-03-24 JP JP2016560561A patent/JP6749842B2/ja not_active Expired - Fee Related
- 2015-03-24 EP EP15721366.1A patent/EP3126892B1/en active Active
- 2015-03-24 WO PCT/US2015/022240 patent/WO2015153200A1/en not_active Ceased
- 2015-03-24 MX MX2016012729A patent/MX2016012729A/es unknown
-
2016
- 2016-05-18 US US15/158,252 patent/US9860434B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004260787A (ja) * | 2002-09-09 | 2004-09-16 | Rohm Co Ltd | イメージセンサモジュール |
| JP2007033819A (ja) * | 2005-07-26 | 2007-02-08 | Konica Minolta Opto Inc | 撮像光学系、撮像レンズ装置及びデジタル機器 |
| JP2008180808A (ja) * | 2007-01-23 | 2008-08-07 | Funai Electric Co Ltd | ステレオ画像撮像装置 |
| JP2008242446A (ja) * | 2007-02-26 | 2008-10-09 | Hoya Corp | 撮像ユニット及び携帯用電子機器 |
| JP2009049900A (ja) * | 2007-08-22 | 2009-03-05 | Hoya Corp | 撮像装置 |
| US20090153726A1 (en) * | 2007-12-13 | 2009-06-18 | Hae Keun Lim | Camera Module |
| JP2009192581A (ja) * | 2008-02-12 | 2009-08-27 | Konica Minolta Opto Inc | レンズ鏡胴及び撮像装置 |
| WO2010103948A1 (ja) * | 2009-03-10 | 2010-09-16 | コニカミノルタオプト株式会社 | 撮像光学系,撮像光学装置及びデジタル機器 |
| JP2012088374A (ja) * | 2010-10-15 | 2012-05-10 | Hoya Corp | 撮像ユニット |
| JP2013238848A (ja) * | 2012-04-20 | 2013-11-28 | Hoya Corp | 撮像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015153200A1 (en) | 2015-10-08 |
| EP3126892B1 (en) | 2020-02-19 |
| US20150288865A1 (en) | 2015-10-08 |
| US20160269602A1 (en) | 2016-09-15 |
| CN106164766B (zh) | 2019-08-09 |
| CN106164766A (zh) | 2016-11-23 |
| US9374516B2 (en) | 2016-06-21 |
| EP3126892A1 (en) | 2017-02-08 |
| BR112016023168B1 (pt) | 2022-07-19 |
| BR112016023168A2 (ja) | 2017-08-15 |
| JP6749842B2 (ja) | 2020-09-02 |
| KR20160140905A (ko) | 2016-12-07 |
| US9860434B2 (en) | 2018-01-02 |
| MX2016012729A (es) | 2016-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6749842B2 (ja) | ロープロファイル屈曲光学系マルチカメラシステムにおけるオートフォーカス | |
| US9973680B2 (en) | Auto-focus in low-profile folded optics multi-camera system | |
| US11567305B2 (en) | Zoom dual-aperture camera with folded lens | |
| JP6837841B2 (ja) | 屈曲光学アレイカメラのためのオートフォーカス | |
| US10284780B2 (en) | Auto focus and optical image stabilization with roll compensation in a compact folded camera | |
| US9854182B2 (en) | Folded optic array camera using refractive prisms | |
| US11988851B2 (en) | Lens system with optical actuator | |
| KR102638527B1 (ko) | 엑추에이터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161215 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200714 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200812 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6749842 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |