JP2017515517A - 所定の曲線軌道に沿って前進するための装置およびその操作方法 - Google Patents
所定の曲線軌道に沿って前進するための装置およびその操作方法 Download PDFInfo
- Publication number
- JP2017515517A JP2017515517A JP2016552309A JP2016552309A JP2017515517A JP 2017515517 A JP2017515517 A JP 2017515517A JP 2016552309 A JP2016552309 A JP 2016552309A JP 2016552309 A JP2016552309 A JP 2016552309A JP 2017515517 A JP2017515517 A JP 2017515517A
- Authority
- JP
- Japan
- Prior art keywords
- segment
- segments
- conduit
- assembly
- additional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/06—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member
- F16H19/0636—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member the flexible member being a non-buckling chain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/008—Articulations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C1/00—Flexible shafts; Mechanical means for transmitting movement in a flexible sheathing
- F16C1/02—Flexible shafts; Mechanical means for transmitting movement in a flexible sheathing for conveying rotary movements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16G—BELTS, CABLES, OR ROPES, PREDOMINANTLY USED FOR DRIVING PURPOSES; CHAINS; FITTINGS PREDOMINANTLY USED THEREFOR
- F16G13/00—Chains
- F16G13/18—Chains having special overall characteristics
- F16G13/20—Chains having special overall characteristics stiff; Push-pull chains
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/04—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising a rack
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00331—Steering mechanisms with preformed bends
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/00336—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means with a protective sleeve, e.g. retractable or slidable
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/06—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member
- F16H2019/069—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member with means for generating two superposed movements, e.g. for driving a X-Y table
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Surgery (AREA)
- Mechanical Engineering (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Rehabilitation Therapy (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Drilling And Boring (AREA)
- Perforating, Stamping-Out Or Severing By Means Other Than Cutting (AREA)
- Processing Of Stones Or Stones Resemblance Materials (AREA)
Abstract
所定の曲線軌道に沿って前進するための装置であって、導管遠位端を有する導管と、該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、該細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、およびセグメントアセンブリの該一部に沿って第2の延長部を備える第2の状態であって、第2の延長部は第1の延長部を超える、第2の状態を有するように、該主軸に沿って延在する偏向部材とを備える装置が提供される。【選択図】図2C
Description
本開示の主題は、構造の中に導入するために使用される装置の分野に関し、詳細には所定の曲線軌道に沿って前進するために作成された装置に関する。
開口(例えば穴)を介して構造の中に導入するための装置は長年に亘って公知であり、様々な応用に使用されている。例えばこれらの装置は、機械工学に使用されるドリル、医療用内視鏡検査に使用されるカテーテル、様々な監視目的のために使用される監視デバイスなどとして公知である。場合によっては、直線経路に沿って装置を導入し、後のある段階でデバイスを固定させなければならず、その経路をしっかりと画定しなければならない所定の曲線軌道に導入経路を変更する必要がある。
本開示の主題は、直線経路に沿って対象の中に導入し、その中で所定の曲線軌道に沿って前進するための装置および方法に関する。装置および方法は、多種多様な用途、例えば少なくとも1つの対象を構造の中に導入するための担体を構成すること、構造内の特定の場所を監視すること、構造内または構造を通る曲線チャネルを形成すること、例えば掘削により構造内の経路を切り開くこと、構造内に曲線固着部材を提供すること、構造内に補強部材を形成すること、構造から材料の試料を切り取ること、構造内の領域を充填すること、および構造の部分の間の間隔を広げることに使用することができる。
用語「構造」は本明細書および特許請求の範囲において以下、医学、機械学、物理学、工学などの分野で公知のあらゆる部分または要素を指す。構造は、例えば人体、動物体、および無生物であることが可能である。構造は、例えば以下の材料またはその組合せ、すなわちコンクリート、木材、金属、プラスチックおよび土などから作成することができる。
装置およびその部品の構造の寸法を、実施されるように意図された用途に従って選択することができる。
本開示の主題の第1の態様によれば、所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.その最遠位セグメントを含むセグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、およびセグメントアセンブリの該一部に沿って第2の延長部を備える第2の状態であって、第2の延長部は第1の延長部を超える、第2の状態を有するように、該主軸に沿って延在する偏向部材とを備える装置が提供される。
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.その最遠位セグメントを含むセグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、およびセグメントアセンブリの該一部に沿って第2の延長部を備える第2の状態であって、第2の延長部は第1の延長部を超える、第2の状態を有するように、該主軸に沿って延在する偏向部材とを備える装置が提供される。
偏向部材は、少なくとも偏向部材が第1の状態から第2の状態にその状態を変更するときに、遠位端が押圧力を少なくとも最遠位セグメント上にかけることができるように、少なくともセグメントアセンブリの該最遠位セグメントに機械的に関連付けられた遠位端を有する。セグメントアセンブリは、少なくとも押圧力がかけられたときに、すべてのセグメントが互いに平行なそれらの配向軸を有する偏向部材の第1の状態に関連付けられた直線構成から、セグメントアセンブリの少なくとも一部が導管遠位端を超えて延在し、対応するセグメントの配向軸がその間に角度をなすように、またセグメントアセンブリの一部が曲線形状となるように、該一部の対応するセグメントはそれらのヒンジにより互いに対してそれらの配向を変更する、偏向部材の第2の状態に関連付けられた曲線構成にその構成を変更するように構成される。
本開示の主題の第2の態様によれば、所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.導管に沿って延在し、すべてのセグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部が導管遠位端を超えて延在し、該一部の対応するセグメントは、対応するセグメントの配向軸がその間に角度をなすように、またセグメントアセンブリの一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成にセグメントアセンブリの構成を変更するように構成された偏向部材とを備える装置が提供される。
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.導管に沿って延在し、すべてのセグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部が導管遠位端を超えて延在し、該一部の対応するセグメントは、対応するセグメントの配向軸がその間に角度をなすように、またセグメントアセンブリの一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成にセグメントアセンブリの構成を変更するように構成された偏向部材とを備える装置が提供される。
セグメントアセンブリは、その曲線構成内にあるときに凹側面および凸側面を有する。少なくともセグメントの大部分において、隣接したセグメントの各対は凹側面より凸側面に接近した安定化部を有し、その間をヒンジ以外で連結される。安定化部は、互いに対して隣接したセグメントの捻転に抵抗するように、セグメントアセンブリの直線構成および曲線構成の両方において互いに係合するように構成される。
本開示の主題の第3の態様によれば、所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.導管に沿って延在し、すべてのセグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部が導管遠位端を超えて延在し、該一部の対応するセグメントは、後者のセグメントの配向軸がその間に角度をなすように、またセグメントアセンブリの一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成にセグメントアセンブリの構成を変更するように構成された偏向部材とを備える装置が提供される。
a.導管遠位端を有する導管と、
b.該導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、
c.導管に沿って延在し、すべてのセグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部が導管遠位端を超えて延在し、該一部の対応するセグメントは、後者のセグメントの配向軸がその間に角度をなすように、またセグメントアセンブリの一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成にセグメントアセンブリの構成を変更するように構成された偏向部材とを備える装置が提供される。
セグメントアセンブリは、その曲線構成内にあるときに凹側面および凸側面を有する。ヒンジは、偏向部材より凹側面に接近して配置される。
装置の第1の態様では、セグメントアセンブリはその曲線構成内にあるときに凹側面および凸側面を有しうる。装置の第1の態様および第3の態様では、少なくともセグメントの大部分において隣接したセグメントの各対は凹側面より凸側面に接近した安定化部を有することができ、その間をヒンジ以外で連結される。安定化部は、互いに対して隣接したセグメントの捻転に抵抗するように、セグメントアセンブリの直線構成および曲線構成の両方において互いに係合するように構成されることが可能である。
装置の第1の態様および第2の態様では、ヒンジを偏向部材より凹側面に接近して配置することができる。
あらゆる1つまたは複数の以下の特徴、設計および構成を独立してまたはそれらの組合せで、本開示の主題による装置に組み込むことができる。
直線構成内で、アセンブリの一部に関連付けられたセグメントは、互いに対してそれらの平行な配向をとるように導管の内壁によって制限されることが可能である。
偏向部材の遠位端は、少なくともセグメントアセンブリの一部が導管遠位端を介して導管の中に導入され、セグメントアセンブリが曲線構成から直線構成にその構成を変更し、それによって偏向部材の状態が第2の状態から第1の状態に変更するときに、最遠位セグメントが押圧力を遠位端上にかけることができるように、最遠位セグメントと機械的に関連付けられることがさらに可能である。
装置は、細長い部材を導管に沿って移動させ、セグメントアセンブリの一部が導管遠位端を超えて延在し、導管遠位端を介して導管の中に導入されるために、押圧力を細長い部材上に加えるように構成された移動機構をさらに備えることができる。
装置は、偏向部材に機械的に関連付けられ、偏向部材を主軸に沿って移動させ、第1の状態と第2の状態との間でその状態を変更するように構成されたアクチュエータをさらに備えることができる。
細長い部材を導管に沿って移動させる移動機構の操作が、偏向部材を同じ方向に移動させるアクチュエータの操作を伴い、それによって細長い部材のその方向への移動を支援するように、移動機構はアクチュエータに機械的に関連付けられることが可能である。
偏向部材および移動機構の両方が押圧力を同じ方向に加えることができることにより、セグメントアセンブリを構造の中に有効に前進させることができる。偏向部材の移動方向が細長い部材の移動方向と同様であるという事実により、偏向部材が細長い部材を構造の中に前進させる支援をし、この前進を高めることができる。
細長い部材は、追加のセグメントアセンブリ、ならびにセグメントアセンブリが連結された第1の端部および追加のセグメントアセンブリが連結された第2の端部を有する可動部材をさらに備えることができる。
追加のセグメントアセンブリは、互いにヒンジで連結された複数の追加のセグメントから形成されることが可能であり、それぞれは主軸に垂直な配向軸を有する。セグメントアセンブリの最遠位にあるそのセグメントを含む、追加のセグメントアセンブリの少なくとも一部に沿った、追加の第1の延長部を備える追加の第1の状態、および追加のセグメントアセンブリの該一部に沿った追加の第2の延長部を備える追加の第2の状態を有するように、偏向部材は該主軸に沿って延在する。追加の第1の延長部は追加の第2の延長部を超える。偏向部材は、少なくとも偏向部材が追加の第1の状態から追加の第2の状態にその状態を変更するときに、該最近位セグメントが押圧力を偏向部材の近位端上にかけることができるように、該追加のセグメントアセンブリの少なくとも該最近位セグメントに機械的に関連付けられた近位端を有することができる。追加のセグメントアセンブリは、少なくとも該押圧力が該近位端上にかけられたときに、対応するセグメントの配向軸がその間に角度をなすように、すべての追加のセグメントがそれらのヒンジにより互いに対する配向で配置される、偏向部材の該追加の第1の状態に関連付けられた追加の曲線構成から、追加のセグメントアセンブリの一部のセグメントが互いに平行なそれらの配向軸を有する、偏向部材の該追加の第2の状態に関連付けられた追加の直線構成にその構成を変更するように構成されることが可能である。
追加のセグメントの数は、セグメントアセンブリのセグメントの数と同一であることが可能である。
偏向部材の第1の状態では、偏向部材の第1の状態はその追加の第1の状態をとることが可能であり、偏向部材の第2の状態では、偏向部材の第2の状態はその追加の第2の状態をとることが可能である。
曲線形状は、追加の曲線形状に類似するかまたは同一であることが可能である。
セグメントアセンブリが導管遠位端から延在するために、細長い部材を導管に沿って移動させる移動機構の操作が、追加の曲線構成から追加の直線構成にその構成を変更するために追加のセグメントアセンブリの一部を伴い、追加の直線構成は近位端の押圧力を偏向部材上にかけるために追加のセグメントアセンブリの最近位セグメントを伴うことにより、偏向部材が同じ方向に移動し、その状態が第1の状態から第2の状態に変更し、それによってセグメントアセンブリの構成が直線構成から曲線構成に変更するように、またセグメントアセンブリが導管遠位端を介して導管の中に導入するために、細長い部材を導管に沿って移動させる移動機構の操作が、曲線構成から直線構成にその構成を変更するためにセグメントアセンブリを伴い、直線構成は押圧力を偏向部材の遠位端上にかけるために最遠位セグメントを伴うことにより、偏向部材が同じ方向に移動し、追加の第2の状態から追加の第1の状態にその状態が変更し、それによって追加のセグメントアセンブリの構成が追加の直線構成から追加の曲線構成に変更するように、アクチュエータはセグメントアセンブリおよび追加のセグメントアセンブリによって構成されることが可能である。
曲線チャネルは、追加のセグメントアセンブリをその追加の直線構成内に収納するために導管に沿って延在する直線部、およびその中で追加のセグメントアセンブリの一部を追加のセグメントアセンブリの追加の曲線構成内に収納するための曲線部を有することができる。追加のセグメントアセンブリは、その追加の直線構成と追加の曲線構成との間の曲線チャネル内で移動可能である。
移動機構はラック・ピニオンギアを備えることができ、ピニオンは円形ギアであり、ラックは細長い部材に沿って形成された直線ギアである。
安定化部は、1つのセグメントの突起部、および突起部を受領するように構成されたその隣接したセグメントの窪み部によって構成されることが可能である。
ヒンジは凹側面に近接して配置されることが可能であり、偏向部材は凸側面に近接して配置されることが可能である。
曲線形状は、凹側面に面する曲率の中心Oおよび主軸と曲率の中心Oとの間に画定された半径Rによって特徴付けられた弧であることが可能である。セグメントアセンブリの一部のヒンジは、曲率の中心Oから第1の距離D1に等間隔に配置されることが可能であり、偏向部材は細長い部材内に形成された第1のチャネルに沿って延在する。第1のチャネルは曲率の中心Oから第2の距離D2に離間されることが可能であり、以下の条件D1<R<D2を満たす。
該少なくともセグメントの大部分の各セグメントは、凹側面の一部を構成する内部セグメント面と、それに対向し凸側面の一部を構成する外部セグメント面と、窪み部の少なくとも一部を構成し、それぞれがその間で内部セグメント面と外部セグメント面との間に延在する、対向する第1外翼および第2の外翼と、突起部の少なくとも一部を構成し、それぞれが内部セグメント面と外部セグメント面との間に延在する、対向する第1の内翼および第2の内翼とを備えることができる。1つのセグメントの第1の内翼および第2の内翼は、その隣接したセグメントの第1の外翼と第2の外翼との間に形成された窪み部内に受領されることが可能であり、窪み部内でヒンジにより可動であり、それによってセグメントアセンブリを形成し、セグメントアセンブリがその構成を変更することができる。
1つのセグメントの第1の外翼がその隣接したセグメントの第1の内翼に枢動可能に連結され、該1つのセグメントの第2の外翼が隣接したセグメントの第1の内翼に枢動可能に連結されるように、2つの隣接したセグメントの間は連結されることが可能である。
第1の外翼および前記第2の外翼はそれぞれ、第1の正面接触面と、第2の正面接触面と、第1の背面接触面と、第2の背面接触面であって、直線構成において1つのセグメントの第2の背面接触面はその隣接したセグメントの第2の正面接触面に接触し、それによってその間のヒンジに加えて2つの隣接したセグメントの間に接触面を提供し、曲線構成において1つのセグメントの第1の正面接触面がその隣接したセグメントの第1の背面接触面に接触し、それによってこれらのセグメントの偏向を互いに対して既定の範囲に定め、押圧力を最遠位セグメントからそれに続くセグメントの少なくとも1つに移動させることにより、セグメントが隣接したセグメントの配向軸の間に角度をなすように、第1の正面接触面と、第2の正面接触面と、第1の背面接触面と、第2の背面接触面とを備えることができる。
移動機構により押圧力をかけることにより、1つのセグメントの第2の正面接触面と、その隣接したセグメントの第2の背面接触面との接触により、互いに対して直線配向に配置された2つのセグメントの間でその間のヒンジに加えて、また1つのセグメントの第1の正面接触面と、その隣接したセグメントの第1の背面接触面との接触により、それらの配向軸の間に角度をなす2つのセグメントの間でその間のヒンジに加えてこの力を伝送することができる。
偏向部材は、細長い金属ストリップ、細長い折り曲げ可能なロッド、ローラチェーンおよびカルダンシャフトを備える群から選択されることが可能である。
セグメントは、それぞれ加工工具が細長い部材を通過できるように構成された第2のチャネルを含むことができる。
装置は、セグメントの第2のチャネル内に受領されるシャフト、および最遠位セグメントに近接したシャフトの遠位端に装着可能な先端を備える、上記の加工工具をさらに備えることができる。
シャフトは回転可能であることが可能である。
本開示の主題の装置による掘削操作の開始および直線構成から曲線構成に構成の変更中に以下の力、すなわち
−操作者により装置全体に掘削方向にかけられる押圧力と、
−移動機構により細長い部材上に掘削軸に沿ってかけられる押圧力と、
−偏向部材により掘削軸に沿ってベクトル成分を有する最遠位セグメント上にかけられる押圧力とを同時にかけることができる。
−操作者により装置全体に掘削方向にかけられる押圧力と、
−移動機構により細長い部材上に掘削軸に沿ってかけられる押圧力と、
−偏向部材により掘削軸に沿ってベクトル成分を有する最遠位セグメント上にかけられる押圧力とを同時にかけることができる。
上記の3つの押圧力は実質的に、また少なくとも掘削操作の開始中に少なくとも部分的に同じ方向にかけられるという、構造の有効な掘削が獲得される。これらの力がかけられると、それらの力の累積は対象内に増大された有効な掘削を提供することができる。
本開示の主題の第4の態様によれば、所定の曲線軌道に沿って前進するための装置を操作するための方法が提供される。方法は、
a.導管遠位端を有する導管と、前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、およびセグメントアセンブリの該一部に沿って第2の延長部を備える第2の状態であって、第2の延長部は第1の延長部を超える、第2の状態を有するように、該主軸に沿って延在する偏向部材であって、該偏向部材は、少なくとも該セグメントアセンブリの該最遠位セグメントに機械的に関連付けられた遠位端を有する、偏向部材とを備える該装置を獲得するステップと、
b.セグメントアセンブリの少なくとも該一部が導管遠位端を超えて延在するように、細長い部材を導管に沿って移動させるステップと、
c.偏向部材の状態を第1の状態から第2の状態に変更するステップであって、それによって偏向部材の遠位端が押圧力を少なくとも最遠位セグメント上にかける、変更するステップと、
d.セグメントアセンブリが少なくとも該押圧力を用いて、すべてのセグメントが互いに平行なそれらの配向軸を有する偏向部材の該第1の状態に関連付けられた直線構成から、セグメントアセンブリの少なくとも該一部が該導管遠位端を超えて延在し、該一部の対応するセグメントは、対応するセグメントの配向軸がそれによってセグメントアセンブリの該一部を曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する、偏向部材の該第2の状態に関連付けられた曲線構成にその構成を変更するステップとを含む。
a.導管遠位端を有する導管と、前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは主軸に垂直な配向軸を有する、細長い部材と、その最遠位セグメントを含むセグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、およびセグメントアセンブリの該一部に沿って第2の延長部を備える第2の状態であって、第2の延長部は第1の延長部を超える、第2の状態を有するように、該主軸に沿って延在する偏向部材であって、該偏向部材は、少なくとも該セグメントアセンブリの該最遠位セグメントに機械的に関連付けられた遠位端を有する、偏向部材とを備える該装置を獲得するステップと、
b.セグメントアセンブリの少なくとも該一部が導管遠位端を超えて延在するように、細長い部材を導管に沿って移動させるステップと、
c.偏向部材の状態を第1の状態から第2の状態に変更するステップであって、それによって偏向部材の遠位端が押圧力を少なくとも最遠位セグメント上にかける、変更するステップと、
d.セグメントアセンブリが少なくとも該押圧力を用いて、すべてのセグメントが互いに平行なそれらの配向軸を有する偏向部材の該第1の状態に関連付けられた直線構成から、セグメントアセンブリの少なくとも該一部が該導管遠位端を超えて延在し、該一部の対応するセグメントは、対応するセグメントの配向軸がそれによってセグメントアセンブリの該一部を曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する、偏向部材の該第2の状態に関連付けられた曲線構成にその構成を変更するステップとを含む。
ステップ(b)は、ステップ(d)を引き起こすことができるステップ(c)を引き起こすことができる。
ステップ(d)は、偏向部材を細長い部材の移動方向と同様の移動方向に、導管に沿ってアクチュエータによって移動させることによって実施されることが可能である。
方法は、セグメントアセンブリの少なくとも該一部を導管遠位端の中に導入させ、それによって少なくともセグメントアセンブリの一部が第2の状態から第1の状態に偏向部材の状態を変更し、セグメントアセンブリが曲線構成から直線構成にその構成を変更できるときに、最遠位セグメントが押圧力を遠位端上にかけるように、導管に沿って細長い部材を移動させるステップをさらに含むことができる。
細長い部材の移動は、押圧力を細長い部材上に細長い部材のそれぞれの移動方向に加える、移動機構を操作することによって実施されることが可能である。
次に本明細書に開示された主題をよりよく理解し、本主題を実際にどのように実行できるかを実証するために、実施形態を非制限例のみとして添付図面を参照して説明する。
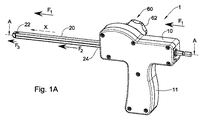
本開示の主題の一例により装置1およびその操作方法を説明するために、まず図1A〜図1F、図2A〜図2Fおよび図3A〜図3Fを参照する。
上の図の例によれば、装置1は所定の曲線軌道に沿って前進するように構成されたドリルである。その異なる態様による本開示の主題の装置は、掘削以外の用途を有することができ、掘削は用途の1つに過ぎないことが理解される。
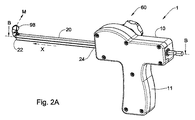
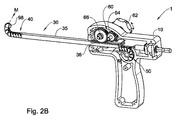
装置1は以下の構成要素、すなわち筐体10、筐体10から延びる導管20、セグメントアセンブリ40を備える細長い部材30、移動機構60および偏向部材70を備える。概して装置1の操作は、移動機構60の作動により、セグメントアセンブリ40が偏向部材70によりセグメントアセンブリ40の延在部の偏向を自動的に伴う導管20から外側に所定の安定化された曲線形状に延在するものである。加えてセグメントアセンブリ40を導管20の中に自動的に導入させる移動機構60の作動により、セグメントアセンブリ40の導入された部分が導管20内でまっすぐになる。
図1A〜図1Fは、導管20内に完全に配置されたセグメントアセンブリ40を備える装置1を示す。図2A〜図2Fは、導管20から外に延び、曲線形状を有するセグメントアセンブリ40の一部を備える装置1を示す。図3A〜図3Fは、導管20から完全に外に延び、それぞれの曲線形状を有するセグメントアセンブリ40を備える装置1を示す。
以下は装置1の構造およびその操作方法についての詳しい説明である。
筐体10は、装置1の操作者の手に適合するように形状されたハンドル11を有する。導管20は、開口を備える導管遠位端22および筐体10に連結された導管近位端24を有する。導管遠位端22および導管近位端24は軸Xに沿って延在する。
操作者が装置1をハンドル11で保持すると、導管遠位端22を処理する構造の孔の中に導入することができる。孔が存在しない場合、導管遠位端22は、操作者により構造に近接して装置1によって生成されるべき孔の場所に配置されることが可能である。
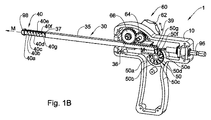
細長い部材30(図4Aに詳細に示されている)は、導管20に沿って筐体10内に延在する。細長い部材30は、可動部材35、セグメントアセンブリ40および追加のセグメントアセンブリ50を備える。可動部材35は、セグメントアセンブリ40が枢動可能に連結される第1の端部37、および追加のセグメントアセンブリ50が枢動可能に連結される第2の端部39を有する。細長い部材30は、細長い部材30の中央でその全長に沿って延在する軸として画定された主軸Mを有する。
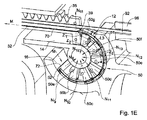
筐体10は曲線チャネル12を有し、その中に追加のセグメントアセンブリ50が封止され可動である。曲線チャネル12は、直線部14および曲線部16を有する。曲線チャネル12は、直線部14内に受領される追加のセグメントアセンブリ50の一部が直線形状をとるように押し付けられ、曲線部16内に受領される追加のセグメントアセンブリ50の一部が曲線形状をとるように押し付けられるように構築される。
移動機構60は導管20内で軸Xに沿って細長い部材30を移動させるように構成されることにより、セグメントアセンブリ40の一部またはセグメントアセンブリ40全体が導管遠位端22を超えて延在し、またセグメントアセンブリ40が(例えば図2Aおよび図3Aに示されたように)導管遠位端22を介して導管20の中に導入される。また細長い部材30の移動により、追加のセグメントアセンブリ50がそれぞれの方法で軸Mに沿って曲線チャネル12内に移動する。移動機構60の構造および操作を以下に詳述する。
処理される構造の中に導管20を導入後、操作者の決定時に、移動機構60が作動されて、セグメントアセンブリ40が導管遠位端22を超えて延在する一方で、その形状が導管遠位端22を超えたその延長部に比例して湾曲される。
移動機構60は、以下の構成要素によって構成されたラック・ピニオンギアを含む、すなわち回転可能なハンドル62は小さい円形歯車64に装着され、次いでこれは大きい円形歯車66を回転させる。大きい円形歯車66は可動部材35内に形成された直線歯車36上に封止される。ハンドル62の時計回りの回転は(ハンドル62の正面から見たとき)小さい円形歯車64を同じ方向に回転させ、それによって大きい円形歯車66は反時計回りに回転し、次いで押圧力を可動部材35上に加える。この押圧力によりセグメントアセンブリ40は導管遠位端22を超えて延在する。ハンドル62の反時計回りの回転により、セグメントアセンブリ40は導管遠位端22を介して導管20内に導入される。
セグメントアセンブリ40の各セグメントが導管遠位端22から逃れるときに、「クリック音」の可聴表示が装置1の操作者に提供されるように移動機構60を構築することができる。この表示により操作者は、導管20から延在し構造内に配置されるセグメントアセンブリ40の一部の前進および湾曲についての情報を受領することができる。換言すると、各「クリック音」を聞くことにより、操作者は、導管20から逃れたセグメントアセンブリ40の一部の長さがどれだけかを知ることができ、またそれぞれのこの部分の湾曲の範囲がどれだけかを知ることができる。
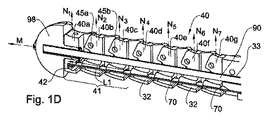
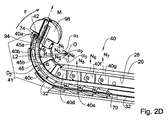
セグメントアセンブリ40は、ピボットにより互いに枢動可能に連結された7つのセグメント40a、40b、40c、40d、40e、40fおよび40g(図1B、図1C、図1D、図2Dおよび図3Dに示されている)から形成される。例えばセグメント40aおよび40bはその間でピボット45aによって連結され、セグメント40bおよび40cはその間でピボット45bによって枢動可能に連結される。図1D、図2Dおよび図3Dに示されたように、各セグメント40a、40b、40c、40d、40e、40fおよび40gは、それぞれの配向軸N1、N2、N3、N4、N5、N6およびN7を有し、それぞれは主軸Mに垂直である。
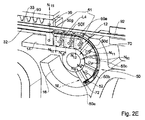
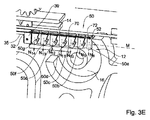
追加のセグメントアセンブリ50は、これも互いにピボットにより枢動可能に連結された、7つのセグメント50a、50b、50c、50d、50e、50fおよび50g(図1B、図1C、図1E、図2Eおよび図3Eに示されている)から形成される。図1E、図2Eおよび図3Eに示されたように、各セグメント50a、50b、50c、50d、50e、50fおよび50gは、それぞれの配向軸N8、N9、N10、N11、N12、N13およびN14を有し、それぞれは主軸Mに垂直である。上記のセグメントの構造の詳しい説明は、図4B〜図4Eを参照して以下に提供される。
細長い部材30は、偏向部材70をその中に収容するために、追加のセグメントアセンブリ50の最近位セグメント50aとセグメントアセンブリ40の最遠位セグメント40aとの間で主軸Mに沿って延在する第1のチャネル32を有する。本例によれば、偏向部材70は、図1F、図2Fおよび図3Fにその異なる状態で明確に示された細長い可撓性でかつ剛性のストリップである。
偏向部材70は近位端72および遠位端74を有する。近位端72は最近位セグメント50a内に形成された近位窪み部52内に着座され、遠位端74は最遠位セグメント40a内に形成された遠位窪み部42内に着座される。近位端72および遠位端74は、偏向部材70が移動機構60の操作時に第1のチャネル32内でわずかな自由移動を有するように、セグメント50aおよび40aに結合も連結もされない。
セグメントアセンブリ40および追加のセグメントアセンブリ50はアクチュエータを構成し、その役割は第1のチャネル32内で偏向部材70を移動させること、およびセグメントアセンブリ40および追加のセグメントアセンブリ50の形状を変更することである。
概ね上述されたように、偏向部材70の役割は、導管遠位端22から延びるセグメントアセンブリ40の一部を直線形状から所定の曲線形状に最大に偏向させること、および導管遠位端22を介して導管20の中に導入されるセグメントアセンブリ40の一部をまっすぐにすることである。
概して、セグメントアセンブリ40の一部が遠位端22を超えて延在するように移動機構60が押圧力を細長い部材30上に加えると、追加のセグメントアセンブリ50も同じ方向に引き寄せられる。具体的には、追加のセグメントアセンブリ50の同様の部分は直線部14内に受領される。これによりそれぞれの追加のセグメントは互いに枢動可能に接近し、それによって第1のチャネル32の各部分の長さは延長部Z(図示せず)によって短縮し、最近位セグメント50aは押圧力を偏向部材70の近位端72上に加える。この押圧力により、偏向部材70は第1のチャネル32内で移動し、押圧力を最遠位セグメント40a上に加える。延長部Zは3つの延長部Z1、Z2およびZ3の和(Z=Z1+Z2+Z3)であり、延長部Z1、Z2およびZ3は図1Eに示されている。同時に部分41は導管遠位端22を超えて延在することだけでなく、最遠位セグメント40a上に偏向部材70の遠位端74によってかけられた押圧力に起因して、部分41のそれぞれのセグメントの旋回が実施されることもわかる。部分41の各セグメントが互いに対して旋回できることにより、部分41内の第1のチャネル32のそれぞれの長さを延長部Zによって増加させることができ、それによって移動する偏向部材70を第1のチャネル32の長い部分の中に受領できる一方で、押圧力を最遠位セグメント40a上に加えることができる。移動機構60の操作の結果として、部分41は導管遠位端22を超えて延在する一方で、その曲線形状が形成される。
次に装置1およびその中の偏向部材70の操作を詳細に説明するために、図1D、図1E、図2Dおよび図2Eを具体的に参照する。
図1Dおよび図1Eは細長い部材30の開始位置を示し、図2Dおよび図2Eはハンドル62の時計回りの回転数の結果として提供された細長い部材30の前進した位置を示す。
図1Dに示されたように、セグメントアセンブリ40全体は導管20内に配置され、セグメントアセンブリ40はその直線構成内にあり、直線構成ではセグメントアセンブリ40のすべてのセグメント40a〜40gは互いに平行なそれらの配向軸N1〜N7を有する。この構成では、セグメントアセンブリ40は、セグメント40a〜40gの軸N1〜N7の間に平行な配向をとるように導管20の内壁28によって制限される。
図2Dでは、セグメントアセンブリ40はその曲線構成内にあり、曲線構成ではセグメントアセンブリ40の部分41は導管遠位端22から延びる。部分41はセグメント40a、40bおよび4cによって構成される。曲線構成では、セグメント40a、40b、40cおよび40dは、配向軸N1、N2、N3およびN4がその間にそれぞれ角α1、α2およびα3を形成するように互いに対して旋回するので、部分41は曲線形状に表示されている。
図1Eでは、追加のセグメントアセンブリ50はその曲線形状にあり、曲線形状では対応するセグメントの配向軸N8〜N15と近位端39がその間に角度をなすように、追加のセグメント50a〜50gはすべてそれらのピボットを用いて互いに対する配向で配置されるので、追加のセグメントアセンブリ50全体は曲線形状に表示されている。この位置では、追加のセグメントアセンブリ50全体は曲線部16内に配置される。
図2Eでは、追加のセグメントアセンブリ50の部分51は直線部14内に受領される。部分51はセグメント50e、50fおよび50gによって構成される。この図によれば、追加のセグメントアセンブリ50はその追加の曲線構成内に配置されている。この構成では、セグメント50a、50bおよび50cと近位端39は互いに平行なそれらの配向軸N12〜N15を有する。
図1Dにおける部分41は図2Eにおける部分51の長さと実質的に同様の長さを有し、図2Dにおける部分41は図1Eにおける部分51の長さと同様の長さを有する。部分41が導管遠位端22を超えて延在し、部分51が直線部14内に受領されるために、細長い部材30は移動機構60により軸Xに沿ってそれぞれの範囲に移動された。
図1Dでは、偏向部材70は第1の延長部L1に沿ってその第1の状態で第1のチャネル32の一部に沿って部分41内に配置され、図2Dでは、偏向部材70は第2の延長部L2に沿ってその第2の状態で第1のチャネル32の一部に沿って部分41内に配置される。L2はL1より大きいことが図面から容易にわかる。他方では図1Eでは、偏向部材70は追加の第1の延長部L3に第1のチャネル32の一部に沿ってその追加の第1の状態で部分51内に配置され、図2Eでは、偏向部材70は追加の第2の延長部L4に第1のチャネル32の一部に沿ってその追加の第2の状態で部分51内に配置される。L3はL4より大きいことが図面から容易にわかる。
細長い部材30が移動機構60により図1Dの位置から図2Dの位置に移動されると、部分51は直線部14の中に引き寄せられる。この移動により以下のことが生じる、すなわち追加のセグメント50gは第2の端部39に向かって旋回され、追加のセグメント50fは追加のセグメント50gに向かって旋回され、追加のセグメント50eは追加のセグメント50fに向かって旋回される。このことが起こるとき、部分51内の第1のチャネル32の長さは低減され、それによって追加の第1の延長部L3の長さから延長部Z(図示せず)を引くと追加の第2の延長部L4になるので、以下の方程式、L3−Z=L4が満たされる。同時に部分41は導管遠位端22を超えて延在するように導管30から引き寄せられることにより、セグメント40aはセグメント40bに対して旋回でき、セグメント40bはセグメント40cに対して旋回でき、セグメント40cはセグメント40dに対して旋回できる。追加の第1の延長部L3の長さが短縮することを鑑みると、追加のセグメント50aは押圧力を近位端72上にかける。この押圧力により偏向部材70が延長部Zに沿って第1のチャネル32内に移動し、それにより偏向部材70の遠位端74がセグメント40aの押圧力をかける。セグメント40a上に加えられた押圧力により以下のことが生じる、すなわちセグメント40aはセグメント40bに対して旋回され、セグメント40bはセグメント40cに対して旋回され、セグメント40cはセグメント40dに対して旋回される。これらの回転に起因して、第1の延長部L1に延長部Zを加えると第2の延長部L2になるので、L1+Z=L2である。
図1Fは図1A〜図1Eの位置にある偏向部材70の形状を示し、図2Fは図2A〜図2Eの位置にある偏向部材70の形状を示す。偏向部材70の形状は細長い部材30の形状に対応することがこれらの図面からわかる。
図2Aの位置から図2Fの位置へハンドル62をさらに回転することにより、セグメントアセンブリ40を図3A〜図3Eに示されているように導管遠位端62から最大範囲に広げることが可能になり、追加のセグメントアセンブリ50が図3Cおよび図3Eに明確に示されているように、その追加の直線構成をとることが可能になる。ここで上記の説明によれば、追加のセグメントアセンブリ50がどのようにアクチュエータの役割を果たすかが明確である。
ハンドル62を反対方向に回転すると、細長い部材30および偏向部材70は反対方向に移動することが理解される。この回転の結果として、セグメントアセンブリ40および追加のセグメントアセンブリ50は役割を交代する。次に最遠位セグメント40aが偏向部材70の押圧力をかけるものであることにより、追加のセグメントアセンブリ50の各部分はその曲線構成をとる。この場合、セグメントアセンブリはアクチュエータの役割を果たす。
次に装置1の掘削機能を説明するために、図1A〜図2Eを具体的に参照する。
細長い部材30は、セグメントアセンブリ40および可動部材35に沿って延在する第2のチャネル33を有する。第2のチャネル33は、近位端92および遠位端94を有する回転可能な折り曲げ可能なシャフト90を収容する。シャフト90の近位端92は回転要素96内に受領され、遠位端94は回転可能な先端98に装着される。回転要素96は手動またはモータ(図示せず)により自動的に回転されるように構成され、それによってシャフト90の回転および先端98のそれぞれの回転を引き起こす。シャフト90をセグメントアセンブリ40の直線構成および曲線構成の両方において回転させることができる。これにより、単一装置により従来の直線掘削および曲線経路に沿った掘削を提供することが可能になる。
対象の中に有効に掘削するために、操作者がその操作中にドリル上に押圧力を加えるべきであることは掘削の分野では公知である。この押圧力はドリルの先端を対象の中に前進させる。
次にその掘削操作の開始中および直線構成から曲線構成に構成を変更中に装置1およびその構成要素に加えられる押圧力を説明するために、図1Aを参照する。
−押圧力F1は操作者により装置全体に軸Xに沿って掘削方向にかけられる、
−押圧力F2は移動機構60により細長い部材30上に軸Xに沿ってかけられる、
−押圧力F3は偏向部材70により軸Xに沿ってベクトル成分を有する最遠位セグメント40a上にかけられる。
−押圧力F1は操作者により装置全体に軸Xに沿って掘削方向にかけられる、
−押圧力F2は移動機構60により細長い部材30上に軸Xに沿ってかけられる、
−押圧力F3は偏向部材70により軸Xに沿ってベクトル成分を有する最遠位セグメント40a上にかけられる。
上記を鑑み、押圧力F1、F2およびF3は少なくとも掘削操作の開始中に実質的に同じ方向にかけられるという、構造の有効な掘削が得られる。これらの力がかけられるとき、それらの力の累積が対象内に増大された有効な掘削を提供することができる。
次に細長い部材30のセグメントおよび特にそれらの構造を示す、図2Dおよび図4A〜図4Eを参照する。図面から明確にわかるように、セグメントアセンブリ40のセグメントおよび追加のセグメントアセンブリ50の追加のセグメントは類似した構成を有し、したがって以下の説明はセグメントアセンブリ40のセグメントについて行われるが、追加のセグメントアセンブリ50の追加のセグメントにも関連する。
セグメントアセンブリ40は、その曲線構成内にあるときに凹側面44および凸側面46を有する。セグメントアセンブリ40のピボット(例えばピボット45aおよび45b)は、偏向部材70より凹側面44に接近して配置される。具体的にはピボットは凹側面44に近接して配置され、偏向部材70は凸側面46に近接して配置される。この構造により、押圧力を偏向部材70によりセグメントアセンブリ40の遠位端にかけることができ、これは凸側面46から凹側面44に向かって方向付けられ、凸側面46に近接して開始される。この力は図2Dに概略的に示されている。この力は、セグメントアセンブリ40が最遠位セグメント40a上に加えられる引張力によって屈曲され、凹側面44に近接して開始されるはずである場合より、はるかに有効である。
図2Dでは、セグメントアセンブリ40の部分41の曲線形状は、凹側面44に面する曲率の中心O、および主軸Mと曲率の中心Oとの間に画定された半径Rによって特徴付けられる弧であることが示されている。部分41のピボットは曲率の中心Oから第1の距離D1に等間隔に配置され、第1のチャネル32に沿って延在する偏向部材70は曲率の中心Oから第2の距離D2に離間され、以下の条件D1<R<D2が満たされる。
図4B〜図40Eに示されたように、隣接したセグメントの各対は、互いに対して隣接したセグメントの捻転に抵抗するように、セグメントアセンブリ40の直線構成および曲線構成の両方において互いに係合するように構成された安定化部80を有する。安定化部80は凹側面44より凸側面46に近接して配置される。安定化部80は、1つのセグメントの突起部81および突起部81を受領するように構成された、その隣接したセグメントの窪み部82によって構成される。安定化部80の構造についての詳しい説明は、単一のセグメントに対して以下に提供される。
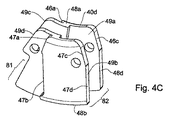
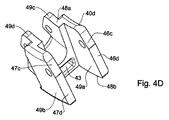
次にセグメント40dが様々な視点から示された図4C〜図4Eを具体的に参照する。セグメント40dは以下の部分、すなわち第2のチャネル33の一部を構成する孔43と、凹側面44の一部を構成する内部セグメント面48aと、それに対向する、凸側面46の一部を構成する外部セグメント面48bと、窪み部82を画定しそれぞれが内部セグメント面48aと外部セグメント面48bとの間に延在する、対向する第1の外翼49aおよび第2の外翼49bと、突起部81を構成しそれぞれが内部セグメント面48aと外部セグメント面48bとの間に延在する、対向する第1の内翼49cおよび第2の内翼49dとを有する。1つのセグメントの第1の内翼49cおよび第2の内翼49dは、第1の外翼49aとその隣接したセグメントの第2の外翼49bとの間に形成された窪み部82内に受領され、窪み部82内で枢動可能に可動に構成され、それによってセグメントアセンブリが形成され、セグメントアセンブリがその構成を変更することが可能になる。
1つのセグメントの第1の外翼49aがその隣接したセグメントの第1の内翼49cに枢動可能に連結され、該1つのセグメントの第2の外翼49bが隣接したセグメントの第1の内翼49dに枢動可能に連結されるように、2つの隣接したセグメントの間が連結される。
第1の外翼49aは以下の4面、すなわち第1の正面接触面46aと、第2の正面接触面46bと、第1の背面接触面46cと、第2の背面接触面46dとを備える。第2の外翼49bは以下の4面、すなわち第1の正面接触面47aと、第2の正面接触面47bと、第1の背面接触面47cと、第2の背面接触面47dとを備える。
セグメントアセンブリの直線構成では、1つのセグメントの第2の背面接触面46dおよび第2の背面接触面47dは、その隣接したセグメントの第2の正面接触面46bおよび第2の正面接触面47bに接触し、それによって2つの隣接したセグメントの間にその間のヒンジに加えて接触面を提供する。
曲線構成では、1つのセグメントの第1の正面接触面46aおよび第1の正面接触面47bは、その隣接したセグメントの第1の背面接触面46cおよび第1の背面接触面47cに接触し、それによってこれらのセグメントの偏向を互いに対して既定の範囲に定める。また部分41のセグメント間の接触により、最遠位セグメント40a上にかけられた押圧力をそれに続くセグメントの少なくとも1つに伝送することができることにより、セグメントが隣接したセグメントの配向軸の間に角度をなす。第1の正面接触面46aおよび第1の正面接触面47bならびに第1の背面接触面46cおよび第1の背面接触面47cの互いに対する場所は、2つの隣接したセグメントの配向軸の間の角度を画定する。例えばこの場所は角α1、α2およびα3の値を画定する。
移動機構60が押圧力を細長い部材30上にかけるために作動されることにより、部分41が導管遠位端22を超えて延在するとき、この力は以下のようにセグメントアセンブリに沿って伝送される、すなわち
i.互いに平行な配向軸を備える2つのセグメントにおいて、この力は、1つのセグメントの第2の正面接触面46bおよび第2の正面接触面47bと、その隣接したセグメントの第2の背面接触面46dおよび第2の背面接触面47dとの間の接触を介して伝送される。力のこの伝送は、セグメント間のヒンジを介するその伝送に加えて実施される。
ii.互いの間に角度をなす配向軸を備える2つのセグメントでは、この力は1つのセグメントの第1の正面接触面46aおよび第1の正面接触面47aと、その隣接したセグメントの第1の背面接触面46cおよび第1の背面接触面47cとの間の接触を介して伝送される。力のこの伝送は、セグメント間のヒンジを介するその伝送に加えて実施される。
i.互いに平行な配向軸を備える2つのセグメントにおいて、この力は、1つのセグメントの第2の正面接触面46bおよび第2の正面接触面47bと、その隣接したセグメントの第2の背面接触面46dおよび第2の背面接触面47dとの間の接触を介して伝送される。力のこの伝送は、セグメント間のヒンジを介するその伝送に加えて実施される。
ii.互いの間に角度をなす配向軸を備える2つのセグメントでは、この力は1つのセグメントの第1の正面接触面46aおよび第1の正面接触面47aと、その隣接したセグメントの第1の背面接触面46cおよび第1の背面接触面47cとの間の接触を介して伝送される。力のこの伝送は、セグメント間のヒンジを介するその伝送に加えて実施される。
次に本開示の主題によるセグメントアセンブリ140の別の例が示された、図5を参照する。この例によれば、セグメントアセンブリ140は2つの第1のチャネル132を有し、それぞれは偏向部材170を備える。この例によれば、偏向部材170は細長い可撓性でかつ剛性のシャフトである。偏向部材170は偏向部材70の機能と同様の機能を有する。
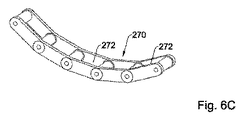
次に本開示の主題によるセグメントアセンブリ240の別の例が示された、図6A〜図6Cを参照する。この例によれば、セグメントアセンブリ240はその中に受領される偏向部材270を備えるチャネル232を有する。この例によれば、偏向部材270は、その間に枢動可能に連結された複数の剛性のセグメント272から形成されたローラチェーンである。偏向部材270は偏向部材70の機能と同様の機能を有する。偏向部材70と270の違いは、それぞれのセグメント272は屈曲不能であり、したがってそれに沿ってかけられる押圧力を有効に伝送でき、他方ではセグメントアセンブリ240を偏向するために必要に応じて偏向部材270全体を屈曲できることである。
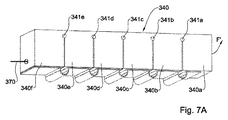
次に本開示の主題によるセグメントアセンブリ340の別の例が示された、図7Aおよび図7Bを参照する。この例によれば、セグメントアセンブリ340はセグメント340a〜340jから構築される。セグメント340a〜340jは、有効なヒンジ341a〜341jにより互いにヒンジで連結され、ヒンジ341a〜341jはセグメントの各対の間を相互連結する可撓性材料の連結部として一体形成される。
セグメントアセンブリ340は偏向部材370に沿って延在する第1のチャネル332を有する。図7Aでは、セグメントアセンブリ340はその直線構成内に示されており、図7Bでは、セグメントアセンブリ340はその曲線構成内に示されている。セグメントアセンブリ340はその曲線構成内にあるときに凹側面344および凸側面346を有する。セグメントアセンブリ340のヒンジ341a〜341jは、偏向部材370より凹側面344に接近して配置される。具体的にヒンジ341a〜341jは凹側面344に近接して配置され、偏向部材370は凸側面346に近接して配置される。この構造により、押圧力F‘を偏向部材370により最遠位セグメント340aにかけることができ、これは凸側面346から凹側面344に向かって方向付けられ、凸側面346に近接して開始される。この力は、セグメントアセンブリ340が最遠位セグメント340a上に加えられる引張力によって屈曲され、凹側面344に近接して開始されるはずである場合よりはるかに有効である。
図7Bでは、セグメントアセンブリ340の曲線形状は、凹側面344に面する曲率の中心O’、およびセグメントアセンブリ340の主軸M’と曲率の中心O’との間に画定された半径R’によって特徴付けられた弧であることが示されている。ヒンジ341a〜341jは曲率の中心O’から第1の距離D1’に等間隔に配置され、第1のチャネル332に沿って延在する偏向部材370は曲率の中心O’から第2の距離D2’に離間され、以下の条件D1’<R’<D2’が満たされる。
セグメントアセンブリ340は凸側面346に配置されたストリップ380をさらに有する。ストリップ380は、それらの回転可能な移動を互いに対して所定の範囲に制限するように、セグメントアセンブリ340の2つの隣接したセグメントを連結する。
次にセグメントアセンブリ440が三次元螺旋として示された、図8A〜図8Cを参照する。
セグメントアセンブリ440は長手軸M’’主軸を有し、セグメントアセンブリ440は主軸M’’に沿って延在する。セグメントアセンブリ440は8つのセグメント440a、440b、440c、440d、440e、440f、440g、440hおよび440iから形成され、8つのセグメントはそれぞれのピボット445a、445b、445c、445d、445e、445f、445gおよび445hにより互いに枢動可能に連結される。ピボットは、それぞれピボット軸P1、P2、P3、P4、P5、P6、P7およびP8を有する。ピボットP1〜P8はそれぞれ90度よりわずかに大きい鈍角で主軸M’’に対して傾斜される。本例によれば、この傾斜はピボットP1〜P8のそれぞれに対して一致する。この角度の値は、主軸M’’に沿ってセグメントアセンブリ440の延長部、具体的にはそのコイルの間の間隔を画定する。
上述された螺旋形状のセグメントアセンブリ440は、構造の一部を挙上するため、またはその中で三次元に前進するために使用されることが可能である。
Claims (49)
- 所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、前記細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは前記主軸に垂直な配向軸を有する、細長い部材と、
c.その最遠位セグメントを含む前記セグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、および前記セグメントアセンブリの前記一部に沿って第2の延長部を備える第2の状態であって、前記第2の延長部は前記第1の延長部を超える、第2の状態を有するように、前記主軸に沿って延在する偏向部材とを備え、
前記偏向部材は、少なくとも前記偏向部材が前記第1の状態から前記第2の状態にその状態を変更するときに、前記遠位端が押圧力を少なくとも前記最遠位セグメント上にかけることができるように、少なくとも前記セグメントアセンブリの前記最遠位セグメントに機械的に関連付けられた遠位端を有し、
前記セグメントアセンブリは、少なくとも前記押圧力がかけられたときに、すべての前記セグメントが互いに平行なそれらの配向軸を有する前記偏向部材の第1の状態に関連付けられた直線構成から、前記セグメントアセンブリの少なくとも前記一部が前記導管遠位端を超えて延在し、前記対応するセグメントの前記配向軸がその間に角度をなすように、また前記アセンブリの前記一部が曲線形状となるように、前記一部の前記対応するセグメントはそれらのヒンジにより互いに対してそれらの配向を変更する、前記偏向部材の前記第2の状態に関連付けられた曲線構成にその構成を変更するように構成される、装置。 - 前記直線構成内で、前記アセンブリの前記一部に関連付けられた前記セグメントは、互いに対してそれらの平行な配向をとるように前記導管の内壁によって制限される、請求項1に記載の装置。
- 前記偏向部材の前記遠位端は、少なくとも前記セグメントアセンブリの前記一部が前記導管遠位端を介して前記導管の中に導入され、前記セグメントアセンブリが前記曲線構成から前記直線構成にその構成を変更し、それによって前記偏向部材の前記状態が前記第2の状態から前記第1の状態に変更するときに、前記最遠位セグメントが押圧力を前記遠位端上にかけることができるように、前記最遠位セグメントと機械的にさらに関連付けられる、請求項1または2に記載の装置。
- 前記細長い部材を前記導管に沿って移動させ、前記セグメントアセンブリの前記一部が前記導管遠位端を超えて延在し、前記導管遠位端を介して前記導管の中に導入されるために、押圧力を前記細長い部材上に加えるように構成された移動機構をさらに備える、請求項1、2または3に記載の装置。
- 前記偏向部材に機械的に関連付けられ、前記偏向部材を前記主軸に沿って移動させ、前記第1の状態と前記第2の状態との間でその状態を変更するように構成されたアクチュエータをさらに備える、請求項4に記載の装置。
- 前記細長い部材を前記導管に沿って移動させる前記移動機構の操作が、前記偏向部材を同じ方向に移動させる前記アクチュエータの操作を伴い、それによって前記細長い部材の前記方向への移動を支援するように、前記移動機構は前記アクチュエータに機械的に関連付けられる、請求項5に記載の装置。
- 前記細長い部材は追加のセグメントアセンブリ、ならびに前記セグメントアセンブリが連結された第1の端部および前記追加のセグメントアセンブリが連結された第2の端部を有する可動部材をさらに備え、前記追加のセグメントアセンブリは、互いにヒンジで連結された複数の追加のセグメントから形成され、それぞれは前記主軸に垂直な配向軸を有し、前記セグメントアセンブリの最遠位にあるその追加のセグメントを含む、前記追加のセグメントアセンブリの少なくとも一部に沿った追加の第1の延長部を備える追加の第1の状態、および前記追加のセグメントアセンブリの前記一部に沿った追加の第2の延長部を備える追加の第2の状態を有するように、前記偏向部材は前記主軸に沿って延在し、前記追加の第1の延長部は前記追加の第2の延長部を超え、前記偏向部材は、少なくとも前記偏向部材が前記追加の第1の状態から前記追加の第2の状態にその状態を変更するときに、前記最近位セグメントが押圧力を前記近位端上にかけることができるように、前記追加のセグメントアセンブリの少なくとも前記最近位セグメントに機械的に関連付けられた近位端を有し、前記追加のセグメントアセンブリは、少なくとも前記押圧力が前記近位端上にかけられたときに、前記対応するセグメントの前記配向軸がその間に角度をなすように、すべての前記追加のセグメントがそれらのヒンジにより互いに対する配向で配置される、前記偏向部材の前記追加の第1の状態に関連付けられた追加の曲線構成から、前記追加のセグメントアセンブリの前記一部の前記セグメントが互いに平行なそれらの配向軸を有する、前記偏向部材の前記追加の第2の状態に関連付けられた、追加の直線構成にその構成を変更するように構成される、請求項6に記載の装置。
- 前記追加のセグメントの数は、前記セグメントアセンブリの前記セグメントの数と同一である、請求項7に記載の装置。
- 前記偏向部材の前記第1の状態では、前記偏向部材の前記第1の状態はその追加の第1の状態をとり、前記偏向部材の前記第2の状態では、前記偏向部材の前記第2の状態はその第2の状態をとる、請求項7または8に記載の装置。
- 前記曲線形状は前記追加の曲線形状に類似するかまたは同一である、請求項7〜9のいずれか1項に記載の装置。
- 前記セグメントアセンブリが前記導管遠位端から延在するために、前記細長い部材を前記導管に沿って移動させる前記移動機構の操作が、前記追加の曲線構成から前記追加の直線構成にその構成を変更するために前記追加のセグメントアセンブリを伴い、前記追加の直線構成は前記近位端の押圧力を前記偏向部材上にかけるために前記追加のセグメントアセンブリの前記最近位セグメントを伴うことにより、前記偏向部材が同じ方向に移動し、その状態が前記第1の状態から前記第2の状態に変更し、それによって前記セグメントアセンブリの前記構成が前記直線構成から前記曲線構成に変更されるように、また前記セグメントアセンブリが前記導管遠位端を介して前記導管の中に導入するために、前記細長い部材を前記導管に沿って移動させる前記移動機構の操作が、前記曲線構成から前記直線構成にその構成を変更するために前記セグメントアセンブリを伴い、前記直線構成は押圧力を前記偏向部材の前記遠位端上にかけるために前記最遠位セグメントを伴うことにより、前記偏向部材が同じ方向に移動し、前記追加の第2の状態から前記追加の第1の状態にその状態が変更され、それによって前記追加のセグメントアセンブリの前記構成が前記追加の直線構成から前記追加の曲線構成に変更されるように、前記アクチュエータは前記セグメントアセンブリおよび前記追加のセグメントアセンブリによって構成される、請求項7〜10のいずれか1項に記載の装置。
- 前記曲線チャネルは、前記追加のセグメントアセンブリの一部をその追加の直線構成内に収納するために前記導管に沿って延在する直線部、およびその中で前記追加のセグメントアセンブリの前記一部を前記追加の曲線構成内に収納するための曲線部を有し、前記追加のセグメントアセンブリは、その追加の直線構成と追加の曲線構成との間の前記曲線チャネル内で移動可能である、請求項7〜11のいずれか1項に記載の装置。
- 前記移動機構はラック・ピニオンギアを備え、前記ピニオンは円形ギアであり、前記ラックは前記細長い部材に沿って形成された直線ギアである、請求項4〜12のいずれか1項に記載の装置。
- 前記セグメントアセンブリは、その曲線構成内にあるときに凹側面および凸側面を有し、前記少なくともセグメントの大部分において、隣接したセグメントの各対は前記凹側面より前記凸側面に接近した安定化部を有し、その間を前記ヒンジ以外で連結され、前記安定化部は、互いに対して前記隣接したセグメントの捻転に抵抗するように、前記セグメントアセンブリの前記直線構成および前記曲線構成の両方において互いに係合するように構成される、請求項1〜13のいずれか1項に記載の装置。
- 前記安定化部は、1つのセグメントの突起部、および前記突起部を受領するように構成されたその隣接したセグメントの窪み部によって構成される、請求項14に記載の装置。
- 前記ヒンジは前記偏向部材より前記凹側面に近接して配置される、請求項14または15に記載の装置。
- 前記ヒンジは前記凹側面に近接して配置され、前記偏向部材は前記凸側面に近接して配置される、請求項16に記載の装置。
- 前記曲線形状は、前記凹側面に面する曲率の中心Oおよび前記主軸と前記曲率の中心Oとの間に画定された半径Rによって特徴付けられた弧であり、前記セグメントアセンブリの前記一部の前記ヒンジは前記曲率の中心Oから第1の距離D1に等間隔に配置され、前記偏向部材は前記細長い部材内に形成された第1のチャネルに沿って延在し、前記第1のチャネルは前記曲率の中心Oから第2の距離D2に離間され、以下の条件、D1<R<D2を満たす、請求項16または17に記載の装置。
- 前記少なくともセグメントの大部分の各セグメントは、前記凹側面の一部を構成する内部セグメント面と、それに対向し前記凸側面の一部を構成する外部セグメント面と、前記窪み部の少なくとも一部を構成し、それぞれがその間で前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1外翼および第2の外翼と、前記突起部の少なくとも一部を構成し、それぞれが前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1の内翼および第2の内翼とを備え、1つのセグメントの前記第1の内翼および前記第2の内翼は、その隣接したセグメントの前記第1の外翼と前記第2の外翼との間に形成された前記窪み部内に受領され、前記窪み部内でヒンジにより可動であり、それによって前記セグメントアセンブリを形成し、前記セグメントアセンブリはその構成を変更できる、請求項15に従属する場合の請求項16〜18のいずれか1項に記載の装置。
- 1つのセグメントの前記第1の外翼がその隣接したセグメントの前記第1の内翼に枢動可能に連結され、前記1つのセグメントの前記第2の外翼が前記隣接したセグメントの前記第1の内翼に枢動可能に連結されるように、2つの隣接したセグメントの間は連結される、請求項19に記載の装置。
- 前記第1の外翼および前記第2の外翼はそれぞれ、第1の正面接触面と、第2の正面接触面と、第1の背面接触面と、第2の背面接触面であって、前記直線構成において1つのセグメントの第2の背面接触面はその隣接したセグメントの第2の正面接触面に接触し、それによってその間の前記ヒンジに加えて前記2つの隣接したセグメントの間に接触面を提供し、前記曲線構成において1つのセグメントの第1の正面接触面がその隣接したセグメントの第1の背面接触面に接触し、それによってこれらのセグメントの前記偏向を互いに対して既定の範囲に定め、押圧力を前記最遠位セグメントからそれに続くセグメントの少なくとも1つに移動させることにより、前記セグメントが前記隣接したセグメントの配向軸の間に角度をなすように、前記第1の正面接触面と、前記第2の正面接触面と、前記第1の背面接触面と、前記第2の背面接触面とを備える、請求項19または20に記載の装置。
- 前記移動機構により前記押圧力をかけることにより、1つのセグメントの前記第2の正面接触面と、その隣接したセグメントの前記第2の背面接触面との前記接触により、互いに対して前記直線配向に配置された2つのセグメントの間でその間の前記ヒンジに加えて、また1つのセグメントの前記第1の正面接触面と、その隣接したセグメントの前記第1の背面接触面との接触により、それらの配向軸の間に角度をなす2つのセグメントの間でその間の前記ヒンジに加えてこの力を伝送する、請求項4に従属する場合の請求項21に記載の装置。
- 前記偏向部材は、細長い金属ストリップ、ローラチェーンおよびカルダンシャフトを備える群から選択される、請求項1〜22のいずれか1項に記載の装置。
- 前記セグメントは、それぞれ加工工具が前記細長い部材を通過できるように構成された第2のチャネルを含む、請求項1〜23のいずれか1項に記載の装置。
- 前記セグメントの前記第2のチャネル内に受領されるシャフト、および前記最遠位セグメントに近接した前記シャフトの遠位端に装着可能な先端を備える、前記加工工具をさらに備える、請求項24に記載の装置。
- 前記シャフトは回転可能である、請求項25に記載の装置。
- 所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、前記細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは前記主軸に垂直な配向軸を有する、細長い部材と、
c.前記主軸に沿って延在し、すべての前記セグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含む前記セグメントアセンブリの少なくとも一部が前記導管遠位端を超えて延在し、前記一部の前記対応するセグメントは、前記対応するセグメントの前記配向軸がその間に角度をなすように、また前記アセンブリの前記一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成に前記セグメントアセンブリの構造を変更するように構成された、偏向部材とを備え、
前記セグメントアセンブリは、その曲線構成内にあるときに凹側面および凸側面を有し、前記少なくともセグメントの大部分において、隣接したセグメントの各対は前記凹側面より前記凸側面に接近した安定化部を有し、その間を前記ヒンジ以外で連結され、前記安定化部は、互いに対して前記隣接したセグメントの捻転に抵抗するように、前記セグメントアセンブリの前記直線構成および前記曲線構成の両方において互いに係合するように構成される、装置。 - 前記安定化部は、1つのセグメントの突起部、および前記突起部を受領するように構成されたその隣接したセグメントの窪み部によって構成される、請求項27に記載の装置。
- 前記ヒンジは前記偏向部材より前記凹側面に近接して配置される、請求項28に記載の装置。
- 前記ヒンジは前記凹側面に近接して配置され、前記偏向部材は前記凸側面に近接して配置される、請求項29に記載の装置。
- 前記曲線形状は、前記凹側面に面する曲率の中心Oおよび前記主軸と前記曲率の中心Oとの間に画定された半径Rによって特徴付けられた弧であり、前記セグメントアセンブリの前記一部の前記ヒンジは前記曲率の中心Oから第1の距離D1に等間隔に配置され、前記偏向部材は前記細長い部材内に形成された第1のチャネルに沿って延在し、前記第1のチャネルは前記曲率の中心Oから第2の距離D2に離間され、以下の条件、D1<R<D2を満たす、請求項29または30に記載の装置。
- 前記少なくともセグメントの大部分の各セグメントは、前記凹側面の一部を構成する内部セグメント面と、それに対向し前記凸側面の一部を構成する外部セグメント面と、前記窪み部の少なくとも一部を構成し、それぞれがその間で前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1外翼および第2の外翼と、前記突起部の少なくとも一部を構成し、それぞれが前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1の内翼および第2の内翼とを備え、1つのセグメントの前記第1の内翼および前記第2の内翼は、その隣接したセグメントの前記第1の外翼と前記第2の外翼との間に形成された前記窪み部内に受領され、前記窪み部内でヒンジにより可動であり、それによって前記セグメントアセンブリを形成し、前記セグメントアセンブリはその構成を変更できる、請求項28〜31のいずれか1項に記載の装置。
- 1つのセグメントの前記第1の外翼がその隣接したセグメントの前記第1の内翼に枢動可能に連結され、前記1つのセグメントの前記第2の外翼が前記隣接したセグメントの前記第1の内翼に枢動可能に連結されるように、2つの隣接したセグメントの間は連結される、請求項31または32に記載の装置。
- 前記第1の外翼および前記第2の外翼はそれぞれ、第1の正面接触面と、第2の正面接触面と、第1の背面接触面と、第2の背面接触面であって、前記直線構成において1つのセグメントの第2の背面接触面はその隣接したセグメントの第2の正面接触面に接触し、それによってその間の前記ヒンジに加えて前記2つの隣接したセグメントの間に接触面を提供し、前記曲線構成において1つのセグメントの第1の正面接触面がその隣接したセグメントの第1の背面接触面に接触し、それによってこれらのセグメントの前記偏向を互いに対して既定の範囲に定め、押圧力を前記最遠位セグメントからそれに続くセグメントの少なくとも1つに移動させることにより、前記セグメントが前記隣接したセグメントの配向軸の間に角度をなすように、前記第1の正面接触面と、前記第2の正面接触面と、前記第1の背面接触面と、前記第2の背面接触面とを備える、請求項31、32または33に記載の装置。
- 前記細長い部材を前記導管に沿って移動させ、前記セグメントアセンブリの前記一部が前記導管遠位端を超えて延在し、前記導管遠位端を介して前記導管の中に導入されるために、押圧力を前記細長い部材上に加えるように構成された移動機構をさらに備える、請求項27〜34のいずれか1項に記載の装置。
- 前記移動機構により前記押圧力をかけることにより、1つのセグメントの前記第2の正面接触面と、その隣接したセグメントの前記第2の背面接触面との前記接触により、互いに対して前記直線配向に配置された2つのセグメントの間でその間の前記ヒンジに加えて、また1つのセグメントの前記第1の正面接触面と、その隣接したセグメントの前記第1の背面接触面との接触により、それらの配向軸の間に角度をなす2つのセグメントの間でその間の前記ヒンジに加えてこの力を伝送する、請求項34に従属する場合の請求項35に記載の装置。
- 前記偏向部材は、前記セグメントアセンブリの少なくとも前記一部に沿って第1の延長部を備える第1の状態、および前記セグメントアセンブリの前記一部に沿って第2の延長部を備える第2の状態を有し、前記第2の延長部は前記第1の延長部を超え、前記最遠位セグメントと前記遠位端との間の機械的関連は、少なくとも前記偏向部材が前記第1の状態から前記第2の状態にその状態を変更し、それによって前記セグメントアセンブリが前記直線構成から前記曲線構成にその構成を変更するときに、前記偏向部材が押圧力を少なくとも前記最遠位セグメント上にかけることができるように構成される、請求項27〜36のいずれか1項に記載の装置。
- 所定の曲線軌道に沿って前進するための装置であって、
a.導管遠位端を有する導管と、
b.前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、前記細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは前記主軸に垂直な配向軸を有する、細長い部材と、
c.前記主軸に沿って延在し、すべての前記セグメントが互いに平行なそれらの配向軸を有する直線構成から、その最遠位セグメントを含む前記セグメントアセンブリの少なくとも一部が前記導管遠位端を超えて延在し、前記一部の前記対応するセグメントは、後者のセグメントの前記配向軸がその間に角度をなすように、また前記アセンブリの前記一部が曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する曲線構成に前記セグメントアセンブリの構造を変更するように構成された、偏向部材とを備え、
前記セグメントアセンブリは、その曲線構成内にあるときに凹側面および凸側面を有し、前記ヒンジは前記偏向部材より前記凹側面の近位に配置される、装置。 - 前記ヒンジは前記凹側面に近接して配置され、前記偏向部材は前記凸側面に近接して配置される、請求項38に記載の装置。
- 前記曲線形状は、前記凹側面に面する曲率の中心Oおよび前記主軸と前記曲率の中心Oとの間に画定された半径Rによって特徴付けられた弧であり、前記セグメントアセンブリの前記一部の前記ヒンジは前記曲率の中心Oから第1の距離D1に等間隔に配置され、前記偏向部材は前記細長い部材内に形成された第1のチャネルに沿って延在し、前記第1のチャネルは前記曲率の中心Oから第2の距離D2に離間され、以下の条件、D1<R<D2を満たす、請求項38または39に記載の装置。
- 前記少なくともセグメントの大部分の各セグメントは、前記凹側面の一部を構成する内部セグメント面と、それに対向し前記凸側面の一部を構成する外部セグメント面と、前記窪み部の少なくとも一部を構成し、それぞれがその間で前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1外翼および第2の外翼と、前記突起部の少なくとも一部を構成し、それぞれが前記内部セグメント面と前記外部セグメント面との間に延在する、対向する第1の内翼および第2の内翼とを備え、1つのセグメントの前記第1の内翼および前記第2の内翼は、その隣接したセグメントの前記第1の外翼と前記第2の外翼との間に形成された前記窪み部内に受領され、前記窪み部内でヒンジにより可動であり、それによって前記セグメントアセンブリを形成し、前記セグメントアセンブリはその構成を変更できる、請求項40に記載の装置。
- 1つのセグメントの前記第1の外翼がその隣接したセグメントの前記第1の内翼に枢動可能に連結され、前記1つのセグメントの前記第2の外翼が前記隣接したセグメントの前記第1の内翼に枢動可能に連結されるように、2つの隣接したセグメントの間は連結される、請求項41に記載の装置。
- 前記第1の外翼および前記第2の外翼はそれぞれ、第1の正面接触面と、第2の正面接触面と、第1の背面接触面と、第2の背面接触面であって、前記直線構成において1つのセグメントの第2の背面接触面はその隣接したセグメントの第2の正面接触面に接触し、それによってその間の前記ヒンジに加えて前記2つの隣接したセグメントの間に接触面を提供し、前記曲線構成において1つのセグメントの第1の正面接触面がその隣接したセグメントの第1の背面接触面に接触し、それによってこれらのセグメントの前記偏向を互いに対して既定の範囲に定め、押圧力を前記最遠位セグメントからそれに続くセグメントの少なくとも1つに移動させることにより、前記セグメントが前記隣接したセグメントの配向軸の間に角度をなすように、前記第1の正面接触面と、前記第2の正面接触面と、前記第1の背面接触面と、前記第2の背面接触面とを備える、請求項41または42に記載の装置。
- 前記少なくともセグメントの大部分において、隣接したセグメントの各対は前記凹側面より前記凸側面に接近した安定化部を有し、その間を前記ヒンジ以外で連結され、前記安定化部は、互いに対して前記隣接したセグメントの捻転に抵抗するように、前記セグメントアセンブリの前記直線構成および前記曲線構成の両方において互いに係合するように構成される、請求項38〜43のいずれか1項に記載の装置。
- 所定の曲線軌道に沿って前進するための装置を操作するための方法であって、
a.導管遠位端を有する導管と、前記導管内に少なくとも一部が延在し、その中でその長さに沿って可動である主軸を有する細長い部材であって、前記細長い部材は互いにヒンジで連結された複数のセグメントから形成されたセグメントアセンブリを備え、それぞれは前記主軸に垂直な配向軸を有する、細長い部材と、その最遠位セグメントを含む前記セグメントアセンブリの少なくとも一部に沿って第1の延長部を備える第1の状態、および前記セグメントアセンブリの前記一部に沿って第2の延長部を備える第2の状態であって、前記第2の延長部は前記第1の延長部を超える、第2の状態を有するように、前記主軸に沿って延在する偏向部材であって、前記偏向部材は、少なくとも前記セグメントアセンブリの前記最遠位セグメントに機械的に関連付けられた遠位端を有する、偏向部材とを備える前記装置を獲得するステップと、
b.前記セグメントアセンブリの少なくとも前記一部が前記導管遠位端を超えて延在するように、前記細長い部材を前記導管に沿って移動させるステップと、
c.前記偏向部材の状態を前記第1の状態から前記第2の状態に変更するステップであって、それによって前記偏向部材の前記遠位端が押圧力を少なくとも前記最遠位セグメントにかける、変更するステップと、
d.前記セグメントアセンブリが少なくとも前記押圧力を用いて、すべての前記セグメントが互いに平行なそれらの配向軸を有する前記偏向部材の第1の状態に関連付けられた直線構成から、前記セグメントアセンブリの少なくとも前記一部は前記導管遠位端を超えて延在し、前記一部の前記対応するセグメントは、前記対応するセグメントの前記配向軸がそれによって前記セグメントアセンブリの前記一部に曲線形状となるように、それらのヒンジにより互いに対してそれらの配向を変更する、前記偏向部材の前記第2の状態に関連付けられた曲線構成にその構成を変更するステップとを含む、方法。 - 前記ステップ(b)は、前記ステップ(d)を引き起こす前記ステップ(c)を引き起こす、請求項45に記載の方法。
- 前記ステップ(d)は、前記偏向部材を前記細長い部材の移動方向と同様の移動方向に、前記導管に沿ってアクチュエータによって移動させることによって実施される、請求項45または46に記載の方法。
- 前記セグメントアセンブリの少なくとも前記一部を前記導管遠位端の中に導入させ、それによって少なくとも前記セグメントアセンブリの前記一部が前記第2の状態から前記第1の状態に前記偏向部材の状態を変更し、前記セグメントアセンブリが前記曲線構成から前記直線構成にその構成を変更できるときに、前記最遠位セグメントが押圧力を前記遠位端上にかけるように、前記導管に沿って前記細長い部材を移動させるステップをさらに含む、請求項45または46に記載の方法。
- 前記細長い部材の前記移動は、押圧力を前記細長い部材上に前記細長い部材のそれぞれの移動方向に加える、移動機構を操作させることによって実施される、請求項48に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IL231054A IL231054A (en) | 2014-02-20 | 2014-02-20 | A device for advancing along a curved track and a method for its operation |
| IL231054 | 2014-02-20 | ||
| PCT/IL2015/050186 WO2015125140A1 (en) | 2014-02-20 | 2015-02-18 | An apparatus for advancement along a predetermined curved trajectory and a method for operation thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017515517A true JP2017515517A (ja) | 2017-06-15 |
Family
ID=51691277
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016552309A Pending JP2017515517A (ja) | 2014-02-20 | 2015-02-18 | 所定の曲線軌道に沿って前進するための装置およびその操作方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10591029B2 (ja) |
| EP (1) | EP3107441B1 (ja) |
| JP (1) | JP2017515517A (ja) |
| KR (1) | KR20160123362A (ja) |
| CN (1) | CN106061363A (ja) |
| CA (1) | CA2939863C (ja) |
| IL (1) | IL231054A (ja) |
| WO (1) | WO2015125140A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019038863A1 (ja) * | 2017-08-23 | 2019-02-28 | オリンパス株式会社 | 処置具 |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10405936B2 (en) | 2008-04-11 | 2019-09-10 | The Regents Of The University Of Michigan | Parallel kinematic mechanisms with decoupled rotational motions |
| US9629689B2 (en) | 2008-04-11 | 2017-04-25 | Flexdex, Inc. | Attachment apparatus for remote access tools |
| US9869339B2 (en) | 2008-04-11 | 2018-01-16 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| IL231054A (en) | 2014-02-20 | 2015-07-30 | Tzony Siegal | A device for advancing along a curved track and a method for its operation |
| EP3282952B1 (en) | 2015-04-03 | 2019-12-25 | The Regents Of The University Of Michigan | Tension management apparatus for cable-driven transmission |
| US10624617B2 (en) | 2015-05-27 | 2020-04-21 | Ambu A/S | Endoscope |
| US10617284B2 (en) | 2015-05-27 | 2020-04-14 | Ambu A/S | Endoscope |
| EP3302217B1 (en) | 2015-05-27 | 2020-06-03 | Ambu A/S | An endoscope |
| WO2016188539A1 (en) | 2015-05-27 | 2016-12-01 | Ambu A/S | An endoscope |
| EP3302214B1 (en) | 2015-05-27 | 2019-07-31 | Ambu A/S | An endoscope comprising a chassis having a shell structure |
| WO2016188543A1 (en) * | 2015-05-27 | 2016-12-01 | Ambu A/S | An endoscope with a tool |
| EP3302213B1 (en) | 2015-05-27 | 2022-11-23 | Ambu A/S | Endoscope |
| JP6887997B2 (ja) | 2015-10-02 | 2021-06-16 | フレックスデックス, インク.Flexdex, Inc. | 無制限ロールを付与するハンドル機構 |
| US12594069B2 (en) | 2015-10-02 | 2026-04-07 | Livsmed, Inc. | Handle assembly providing unlimited roll |
| US11896255B2 (en) | 2015-10-05 | 2024-02-13 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| US10959797B2 (en) | 2015-10-05 | 2021-03-30 | Flexdex, Inc. | Medical devices having smoothly articulating multi-cluster joints |
| CN209548018U (zh) | 2016-02-25 | 2019-10-29 | 弗莱克斯德克斯公司 | 并联运动机构 |
| US10610345B2 (en) | 2016-09-21 | 2020-04-07 | Ethicon, Inc. | Applicator instruments for dispensing surgical fasteners having articulating shafts |
| CN107157554A (zh) * | 2017-06-26 | 2017-09-15 | 内江市市中区人民医院 | 一种经皮椎体成形术定位用穿刺针及穿刺装置 |
| DE102018104768A1 (de) * | 2018-03-02 | 2019-09-05 | Iwis Antriebssysteme Gmbh & Co. Kg | Aktuator mit rückensteifer Kette |
| GB2576039B (en) * | 2018-08-02 | 2021-01-06 | Ip2Ipo Innovations Ltd | A joint |
| US12239322B2 (en) | 2018-08-17 | 2025-03-04 | Empress Medical, Inc. | Device and method for passing tension member around tissue mass |
| US11419610B2 (en) | 2018-08-17 | 2022-08-23 | Empress Medical, Inc. | Device and method for passing tension member around tissue mass |
| CN112770680A (zh) | 2018-08-17 | 2021-05-07 | 安普列斯医疗公司 | 用于压迫肿瘤的装置和方法 |
| US10918833B2 (en) * | 2018-09-26 | 2021-02-16 | Freudenberg Medical, Llc | Modular handle assembly for a steerable catheter |
| KR102850369B1 (ko) * | 2020-05-08 | 2025-08-27 | 엘지전자 주식회사 | 커피 메이커 |
| US11950966B2 (en) | 2020-06-02 | 2024-04-09 | Flexdex, Inc. | Surgical tool and assembly |
| US20230100909A1 (en) * | 2021-08-27 | 2023-03-30 | Michael Peck | Sequential stylet |
| USD1105427S1 (en) | 2023-04-14 | 2025-12-09 | Flexdex, Inc. | Handheld laparoscopic surgical instrument |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5762067A (en) * | 1996-05-30 | 1998-06-09 | Advanced Technology Laboratories, Inc. | Ultrasonic endoscopic probe |
| DE19608809C2 (de) * | 1996-03-07 | 1998-04-09 | Karlsruhe Forschzent | Instrument für die minimal invasive Chirurgie |
| CN1870930A (zh) * | 2003-08-20 | 2006-11-29 | 新引导系统公司 | 活化聚合物关节连接的器械及插入方法 |
| WO2006026520A2 (en) * | 2004-08-31 | 2006-03-09 | Surgical Solutions Llc | Medical device with articulating shaft |
| US7811277B2 (en) * | 2004-09-30 | 2010-10-12 | Boston Scientific Scimed, Inc. | Steerable device and system |
| EP2633829B1 (en) * | 2005-01-05 | 2015-12-09 | NLT Spine Ltd. | Device for introduction into a body along a substantially straight elongated-element-restricting structure |
| US8679097B2 (en) * | 2005-12-20 | 2014-03-25 | Orthodynamix Llc | Method and devices for minimally invasive arthroscopic procedures |
| US20070219550A1 (en) * | 2006-01-27 | 2007-09-20 | Mark Thompson | Device and system for surgical dissection and/or guidance of other medical devices into body |
| EP2024259B1 (en) * | 2006-06-08 | 2019-08-21 | Bannerman, Brett | Medical device with articulating shaft |
| CA2664167A1 (en) * | 2006-10-06 | 2008-04-17 | Tyco Healthcare Group Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| US8021429B2 (en) * | 2007-03-08 | 2011-09-20 | Zimmer Spine, Inc. | Deployable segmented TLIF device |
| US8137263B2 (en) * | 2007-08-24 | 2012-03-20 | Karl Storz Endovision, Inc. | Articulating endoscope instrument |
| US8287469B2 (en) * | 2008-01-09 | 2012-10-16 | Ethicon Endo-Surgery, Inc. | Articulating surgical device and method of use |
| US8328812B2 (en) * | 2008-07-27 | 2012-12-11 | NLT-Spine Ltd. | Tool and corresponding method for removal of material from within a body |
| GB0813990D0 (en) * | 2008-07-31 | 2008-09-10 | Surgical Innovations Ltd | Endoscopic surgical instrument |
| US20100249497A1 (en) * | 2009-03-30 | 2010-09-30 | Peine William J | Surgical instrument |
| US20100280526A1 (en) * | 2009-04-29 | 2010-11-04 | Arch Day Design, Llc | Medical Device With Articulating Shaft Mechanism |
| DE102009042491A1 (de) * | 2009-05-29 | 2010-12-02 | Aesculap Ag | Chirurgisches Instrument |
| US8523844B2 (en) * | 2009-10-30 | 2013-09-03 | Covidien Lp | Surgical instrument with tendon preload-and-locking device |
| US8403945B2 (en) * | 2010-02-25 | 2013-03-26 | Covidien Lp | Articulating endoscopic surgical clip applier |
| US8403832B2 (en) * | 2010-02-26 | 2013-03-26 | Covidien Lp | Drive mechanism for articulation of a surgical instrument |
| US8439912B2 (en) * | 2010-02-26 | 2013-05-14 | Covidien Lp | De-tensioning mechanism for articulation drive cables |
| US9877720B2 (en) * | 2010-09-24 | 2018-01-30 | Ethicon Llc | Control features for articulating surgical device |
| EP2618767A4 (en) * | 2010-09-24 | 2017-11-08 | ArthroCare Corporation | Systems, devices, and methods for providing therapy to an anatomical structure using high frequency pressure waves and/or cryogenic temperatures |
| US20120109186A1 (en) * | 2010-10-29 | 2012-05-03 | Parrott David A | Articulating laparoscopic surgical instruments |
| WO2013018062A1 (en) * | 2011-08-02 | 2013-02-07 | Nlt Spine Ltd. | Bone screw with deflectable portion |
| US8968312B2 (en) * | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| DE102012208605A1 (de) * | 2012-05-23 | 2013-11-28 | Karl Storz Gmbh & Co. Kg | Medizinisches Instrument mit einem Schaft mit einem flexiblen Abschnitt und einem gesteuert krümmbaren Abschnitt |
| US9011429B2 (en) * | 2012-06-07 | 2015-04-21 | Smith & Nephew, Inc. | Flexible probe with adjustable tip |
| US10029073B2 (en) * | 2012-11-13 | 2018-07-24 | Abbott Cardiovascular Systems, Inc. | Steerable assembly for surgical catheter |
| WO2014162511A1 (ja) * | 2013-04-02 | 2014-10-09 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| IL231054A (en) | 2014-02-20 | 2015-07-30 | Tzony Siegal | A device for advancing along a curved track and a method for its operation |
-
2014
- 2014-02-20 IL IL231054A patent/IL231054A/en active IP Right Grant
-
2015
- 2015-02-18 CN CN201580009396.9A patent/CN106061363A/zh active Pending
- 2015-02-18 EP EP15752740.9A patent/EP3107441B1/en not_active Not-in-force
- 2015-02-18 CA CA2939863A patent/CA2939863C/en active Active
- 2015-02-18 KR KR1020167025480A patent/KR20160123362A/ko not_active Withdrawn
- 2015-02-18 JP JP2016552309A patent/JP2017515517A/ja active Pending
- 2015-02-18 WO PCT/IL2015/050186 patent/WO2015125140A1/en not_active Ceased
- 2015-02-18 US US15/118,899 patent/US10591029B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019038863A1 (ja) * | 2017-08-23 | 2019-02-28 | オリンパス株式会社 | 処置具 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3107441B1 (en) | 2020-09-23 |
| CA2939863C (en) | 2023-10-17 |
| IL231054A0 (en) | 2014-09-30 |
| CA2939863A1 (en) | 2015-08-27 |
| WO2015125140A1 (en) | 2015-08-27 |
| KR20160123362A (ko) | 2016-10-25 |
| US20160348769A1 (en) | 2016-12-01 |
| EP3107441A1 (en) | 2016-12-28 |
| EP3107441A4 (en) | 2018-02-14 |
| CN106061363A (zh) | 2016-10-26 |
| IL231054A (en) | 2015-07-30 |
| US10591029B2 (en) | 2020-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017515517A (ja) | 所定の曲線軌道に沿って前進するための装置およびその操作方法 | |
| EP4088668B1 (en) | Bendable endoscopic linear cutter anastomat and assembly thereof | |
| JP6475726B2 (ja) | 器具、特に医療用内視鏡器具又はテクノスコープ | |
| US11076877B2 (en) | Surgical devices with articulating end effectors and methods of using surgical devices with articulating end effectors | |
| WO2006052927A3 (en) | Bioptome | |
| KR20150127284A (ko) | 수술 기구 구동 요소 및 관련 장치, 시스템 및 방법 | |
| JP2010240834A (ja) | 人間のような指を有するロボットハンド | |
| CN107206586A (zh) | 操作输入装置和医疗用机械手系统 | |
| CN106414003B (zh) | 机械手 | |
| JP6153872B2 (ja) | カニューレ挿入されるガイドツール | |
| JP2006501953A5 (ja) | ||
| JP6205304B2 (ja) | 導入装置 | |
| CN216854749U (zh) | 摆头机构及医用吻合器 | |
| US20150173787A1 (en) | Medical Instrument With A Flexible Toothed Belt | |
| CN105992567B (zh) | 处理器具 | |
| KR101821183B1 (ko) | 조향 가능한 카테터를 구비한 의료 장치 | |
| KR101800075B1 (ko) | 헤드부의 방향 제어가 가능한 내시경용 생검 겸자 | |
| WO2013187272A1 (ja) | 医療器具 | |
| CN210204860U (zh) | 一种内镜操作器械 | |
| JP3238138B2 (ja) | 超音波処置装置 | |
| CN209996421U (zh) | 医用磨削刀具 | |
| CN114404025A (zh) | 一种柔性等离子电极 | |
| JPH11313834A (ja) | 鉗 子 | |
| WO2019073665A1 (ja) | 内視鏡用ワイヤ牽引装置 | |
| KR102638012B1 (ko) | 수술용 머니퓰레이터 |