JP2017538221A - 運転者支援システム用の運転者固有盲点を決定する方法、運転者支援システムおよび自動車 - Google Patents
運転者支援システム用の運転者固有盲点を決定する方法、運転者支援システムおよび自動車 Download PDFInfo
- Publication number
- JP2017538221A JP2017538221A JP2017529769A JP2017529769A JP2017538221A JP 2017538221 A JP2017538221 A JP 2017538221A JP 2017529769 A JP2017529769 A JP 2017529769A JP 2017529769 A JP2017529769 A JP 2017529769A JP 2017538221 A JP2017538221 A JP 2017538221A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- blind spot
- determined
- vehicle
- car
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/301—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing combining image information with other obstacle sensor information, e.g. using RADAR/LIDAR/SONAR sensors for estimating risk of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8093—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for obstacle warning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/043—Identity of occupants
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9315—Monitoring blind spots
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Claims (14)
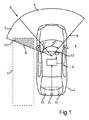
- 自動車(1)用の運転者支援システム(2)を動作させる方法であって、前記自動車(1)の周囲(4)における運転者固有盲点(3)が決定される方法において、
自動車運転者の運転者固有視野(5)の少なくとも1つの境界エッジ(8,9)は、自動車運転者の頭部の動作挙動に応じて、および/または、自動車運転者の視力に応じて決定され、
前記自動車(1)の周囲(4)における、運転者固有盲点(3)の寸法(a2)および/または局所位置は、前記運転者固有視野(5)の決定された境界エッジ(8,9)に応じて決定される、ことを特徴とする方法。 - 前記運転者固有盲点(3)は、前記境界エッジ(8,9)に隣接するその寸法(a2)および/またはその局所位置が決定され、および/または、事前定義された重複領域(10)内で運転者固有視野(5)と重複するようなやり方で決定される、ことを特徴とする請求項1に記載の方法。
- 前記運転者固有盲点(3)は、前記自動車(1)の長手方向軸(25)に平行のその寸法(a3)が、前記運転者固有視野(5)の前記境界エッジ(8,9)に応じて変更される、ことを特徴とする請求項1または2に記載の方法。
- 前記運転者固有盲点(3)は、所定の基準盲点(13)を、前記自動車運転者の頭部の決定された移動挙動に応じて、および/または、前記自動車(1)の自動車運転者の決定された視力に応じて変更することによって決定される、ことを特徴とする請求項1乃至3のいずれかに記載の方法。
- 前記基準盲点(13)と比べて移動挙動が制限されている、および/または、前記自動車運転者の視力が制限されている場合、前記基準盲点(13)を、前記自動車(1)の移動方向(19)に沿って前方向に延ばして、前記運転者固有盲点(3)を生成する、ことを特徴とする請求項4に記載の方法。
- 前記自動車運転者の頭部の移動挙動および/または前記自動車運転者の視力は、複数回検知され、前記運転者固有視野(5)は、前記頭部の平均移動挙動および/または平均視力から決定される、ことを特徴とする請求項1乃至5のいずれかに記載の方法。
- 検知された前記運転者固有視野(5)は、前記自動車(1)が停止された後も保存され、前記自動車運転者によって前記自動車(1)が再び運転される際に利用可能となる、ことを特徴とする請求項1乃至6のいずれかに記載の方法。
- 保存され利用可能となった前記運転者固有視野(5)は、前記自動車運転者の頭部の移動挙動、および/または、前記自動車(1)が再び運転される間に決定された前記自動車運転者の視力に適合される、ことを特徴とする請求項7に記載の方法。
- 前記周囲(4)内にて、後方から前記自動車(1)に接近する物体と、特に前記自動車(1)に対する前記物体の位置とを、前記周囲内で検知し、前記物体に対する自動車運転者の移動反応と、前記移動反応の時刻とを検知し、前記運転者固有の境界エッジの位置を、前記周囲(4)にて検知された移動反応の時刻に、前記物体が有していた位置として決定する、ことを特徴とする請求項1乃至8のいずれかに記載の方法。
- 隣接レーン(21)における同じ移動方向(19)にて、前記自動車(1)の自動車後部(22)に接近する自動車(23)が、前記物体として検知される、ことを特徴とする請求項9に記載の方法。
- 前記物体は、少なくとも1つの車載レーダセンサ(11)によって検知される、ことを特徴とする請求項9または10に記載の方法。
- 前記自動車運転者の移動反応は、少なくとも1つの車載カメラ(12)によって検知される、ことを特徴とする請求項9乃至11のいずれかに記載の方法。
- 請求項1乃至12のいずれかに記載の方法を実行するように構成されている、ことを特徴とする運転者支援システム(2)。
- 請求項13に記載の運転者支援システム(2)を有することを特徴とする自動車(1)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014117830.0A DE102014117830A1 (de) | 2014-12-04 | 2014-12-04 | Verfahren zum Bestimmen eines fahrerspezifischen Totwinkelfeldes für ein Fahrerassistenzsystem, Fahrerassistenzsystem sowie Kraftfahrzeug |
| DE102014117830.0 | 2014-12-04 | ||
| PCT/EP2015/077725 WO2016087292A1 (de) | 2014-12-04 | 2015-11-26 | Verfahren zum bestimmen eines fahrerspezifischen totwinkelfeldes für ein fahrerassistenzsystem, fahrerassistenzsystem sowie kraftfahrzeug |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017538221A true JP2017538221A (ja) | 2017-12-21 |
Family
ID=54705604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017529769A Pending JP2017538221A (ja) | 2014-12-04 | 2015-11-26 | 運転者支援システム用の運転者固有盲点を決定する方法、運転者支援システムおよび自動車 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10024960B2 (ja) |
| EP (1) | EP3227826B1 (ja) |
| JP (1) | JP2017538221A (ja) |
| KR (1) | KR102003141B1 (ja) |
| CN (1) | CN107209850B (ja) |
| DE (1) | DE102014117830A1 (ja) |
| WO (1) | WO2016087292A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024051386A (ja) * | 2022-09-30 | 2024-04-11 | ダイハツ工業株式会社 | 車両用制御装置 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9649979B2 (en) * | 2015-01-29 | 2017-05-16 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle operation in view-obstructed environments |
| KR102256676B1 (ko) * | 2015-02-06 | 2021-05-26 | 삼성전자주식회사 | 전파 기반 센서 모듈을 이용하는 센싱 장치 및 이동 단말을 포함하는 다목적 디바이스 |
| US10115024B2 (en) | 2015-02-26 | 2018-10-30 | Mobileye Vision Technologies Ltd. | Road vertical contour detection using a stabilized coordinate frame |
| US10077056B1 (en) | 2015-04-24 | 2018-09-18 | State Farm Mutual Automobile Insurance Company | Managing self-driving behavior of autonomous or semi-autonomous vehicle based upon actual driving behavior of driver |
| DE102015224555A1 (de) * | 2015-12-08 | 2017-06-08 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Fahrzeugs |
| US10351133B1 (en) | 2016-04-27 | 2019-07-16 | State Farm Mutual Automobile Insurance Company | Systems and methods for reconstruction of a vehicular crash |
| JP6371329B2 (ja) * | 2016-05-16 | 2018-08-08 | トヨタ自動車株式会社 | 車両の運転支援制御装置 |
| DE102017202380A1 (de) * | 2017-02-15 | 2018-08-16 | Bayerische Motoren Werke Aktiengesellschaft | Automatisierte Aktivierung eines Sichtunterstützungssystems |
| US11787287B2 (en) * | 2017-11-17 | 2023-10-17 | Aisin Corporation | Vehicle drive assist system, vehicle drive assist method, and vehicle drive assist program |
| EP3782840B1 (en) | 2019-08-20 | 2023-08-02 | Volvo Car Corporation | Aid for a driver with impaired field of view |
| DE102019213155A1 (de) * | 2019-08-30 | 2021-03-04 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| BE1028219B1 (nl) * | 2020-04-20 | 2021-11-24 | Rombit Nv | Werkwijze, systeem en computerprogrammaproduct voor blinde vlek detectie |
| DE102020209971A1 (de) * | 2020-08-06 | 2022-02-10 | Volkswagen Aktiengesellschaft | Intelligentes Head-Up-Display |
| EP4005889A1 (en) * | 2020-11-30 | 2022-06-01 | Aptiv Technologies Limited | Attention assist method for dynamic blind zone with driver state in the loop, assist system, vehicle and computer program |
| EP4358063A1 (en) * | 2022-10-19 | 2024-04-24 | Continental Autonomous Mobility Germany GmbH | Blind spot detection control apparatus and method |
| CN119928879B (zh) * | 2025-04-10 | 2025-07-01 | 吉林大学 | 基于多因素动态变化盲区监测方法、车辆控制方法及系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006182324A (ja) * | 2004-12-28 | 2006-07-13 | Toyota Motor Corp | 車両用警報装置 |
| JP2006521968A (ja) * | 2003-04-01 | 2006-09-28 | イートン オートモティブ ベスローテン フエンノートシャップ | サイドミラーユニットと作動部 |
| JP2009020570A (ja) * | 2007-07-10 | 2009-01-29 | Denso Corp | 車両用走行支援装置 |
| US20090051516A1 (en) * | 2006-02-23 | 2009-02-26 | Continental Automotive Gmbh | Assistance System for Assisting a Driver |
| JP2010033106A (ja) * | 2008-07-24 | 2010-02-12 | Fujitsu Ten Ltd | 運転者支援装置、運転者支援方法および運転者支援処理プログラム |
| JP2011128799A (ja) * | 2009-12-16 | 2011-06-30 | Panasonic Corp | 運転者状態推定装置及び運転者状態推定方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19904043A1 (de) * | 1999-02-02 | 2000-08-03 | Valeo Schalter & Sensoren Gmbh | System und Verfahren zum Überwachen eines Bereichs an der Seite eines Fahrzeugs |
| DE10220569A1 (de) * | 2002-05-08 | 2003-11-20 | Valeo Schalter & Sensoren Gmbh | Verfahren zum Betreiben eines Fahrzeugumfeldüberwachungssystems und Umfeldüberwachungssystem |
| WO2007145566A1 (en) * | 2006-06-11 | 2007-12-21 | Volvo Technology Corporation | Method and apparatus for determining and analyzing a location of visual interest |
| CN1921621A (zh) * | 2006-09-18 | 2007-02-28 | 李博航 | 全景可视驾驶辅助设备 |
| US7602276B2 (en) | 2007-01-17 | 2009-10-13 | Visteon Global Technologies, Inc. | Variable blind spot warning system |
| US8645001B2 (en) * | 2007-09-04 | 2014-02-04 | International Business Machines Corporation | Method and system for blind spot identification and warning utilizing visual indicators |
| CN101727756B (zh) * | 2008-10-16 | 2012-07-25 | 财团法人工业技术研究院 | 交通工具移动图像辅助导引方法与系统 |
| WO2010131331A1 (ja) * | 2009-05-12 | 2010-11-18 | トヨタ自動車株式会社 | 視認領域推定装置および運転支援装置 |
| TW201100279A (en) * | 2009-06-23 | 2011-01-01 | Automotive Res & Testing Ct | Composite-image-type parking auxiliary system |
| MX2014000649A (es) | 2011-08-02 | 2014-04-30 | Nissan Motor | Dispositivo de asistencia de manejo y metodo de asistencia de manejo. |
| DE102011121616A1 (de) * | 2011-12-20 | 2013-06-20 | Audi Ag | Verfahren zur Ansteuerung einerAnzeigeeinrichtung eines Kraftfahrzeugs |
| DE102012001554A1 (de) * | 2012-01-26 | 2013-08-01 | Connaught Electronics Ltd. | Verfahren zum Betreiben einer Fahrerassistenzeinrichtung eines Kraftfahrzeugs,Fahrerassistenzeinrichtung und Kraftfahrzeug |
| CN103587469B (zh) * | 2013-11-19 | 2017-05-17 | 浙江吉利汽车研究院有限公司 | 一种汽车夜间转弯辅助装置及方法 |
| CN103754219A (zh) * | 2014-02-21 | 2014-04-30 | 重庆邮电大学 | 一种多传感器信息融合的自动泊车系统 |
| CN104090366A (zh) * | 2014-07-23 | 2014-10-08 | 占舒婷 | 一种汽车驾驶眼镜 |
-
2014
- 2014-12-04 DE DE102014117830.0A patent/DE102014117830A1/de not_active Withdrawn
-
2015
- 2015-11-26 EP EP15801403.5A patent/EP3227826B1/de active Active
- 2015-11-26 KR KR1020177016213A patent/KR102003141B1/ko active Active
- 2015-11-26 WO PCT/EP2015/077725 patent/WO2016087292A1/de not_active Ceased
- 2015-11-26 JP JP2017529769A patent/JP2017538221A/ja active Pending
- 2015-11-26 US US15/532,387 patent/US10024960B2/en active Active
- 2015-11-26 CN CN201580073035.0A patent/CN107209850B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006521968A (ja) * | 2003-04-01 | 2006-09-28 | イートン オートモティブ ベスローテン フエンノートシャップ | サイドミラーユニットと作動部 |
| JP2006182324A (ja) * | 2004-12-28 | 2006-07-13 | Toyota Motor Corp | 車両用警報装置 |
| US20090051516A1 (en) * | 2006-02-23 | 2009-02-26 | Continental Automotive Gmbh | Assistance System for Assisting a Driver |
| JP2009020570A (ja) * | 2007-07-10 | 2009-01-29 | Denso Corp | 車両用走行支援装置 |
| JP2010033106A (ja) * | 2008-07-24 | 2010-02-12 | Fujitsu Ten Ltd | 運転者支援装置、運転者支援方法および運転者支援処理プログラム |
| JP2011128799A (ja) * | 2009-12-16 | 2011-06-30 | Panasonic Corp | 運転者状態推定装置及び運転者状態推定方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024051386A (ja) * | 2022-09-30 | 2024-04-11 | ダイハツ工業株式会社 | 車両用制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107209850A (zh) | 2017-09-26 |
| EP3227826B1 (de) | 2024-05-22 |
| DE102014117830A1 (de) | 2016-06-09 |
| KR102003141B1 (ko) | 2019-07-23 |
| CN107209850B (zh) | 2020-11-24 |
| US20170329001A1 (en) | 2017-11-16 |
| US10024960B2 (en) | 2018-07-17 |
| EP3227826A1 (de) | 2017-10-11 |
| WO2016087292A1 (de) | 2016-06-09 |
| KR20170084256A (ko) | 2017-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017538221A (ja) | 運転者支援システム用の運転者固有盲点を決定する方法、運転者支援システムおよび自動車 | |
| CN102656613B (zh) | 使用眼睛注视技术、盲点指示器和驾驶员经验的预测人机接口 | |
| ES2476995T5 (es) | Sistema de asistencia a la conducción para ayuda al mantenimiento del carril, para ayuda al cambio de carril y para vigilancia del estado del conductor para un vehículo | |
| US20180105184A1 (en) | Vehicle control system | |
| US9139135B2 (en) | System and method that minimizes hazards of blind spots while driving | |
| CN105408181B (zh) | 用于运行汽车的驾驶员辅助系统的方法和用于汽车的驾驶员辅助系统 | |
| US20170043720A1 (en) | Camera system for displaying an area exterior to a vehicle | |
| US20140172239A1 (en) | Turning guide assistant for trailer towing | |
| JP2018067198A (ja) | 走行支援装置 | |
| CN106853800B (zh) | 一种车辆行进监控系统 | |
| JP3227175U (ja) | 車両用表示装置 | |
| CN114572232B (zh) | 在行驶中用于伴随驾驶员状态的动态盲区的注意辅助 | |
| US20120022749A1 (en) | Apparatus and methods for eliminating or reducing blind spots in vehicle mirror and camera systems | |
| WO2012045323A1 (en) | Method and driver assistance system for warning a driver of a motor vehicle of the presence of an obstacle in an environment of the motor vehicle | |
| US20180236939A1 (en) | Method, System, and Device for a Forward Vehicular Vision System | |
| US20200020235A1 (en) | Method, System, and Device for Forward Vehicular Vision | |
| TWI538831B (zh) | Vehicle autonomous assist driving system and method | |
| JP2017111732A (ja) | 車両制御装置 | |
| JP6398182B2 (ja) | 信号情報提示装置 | |
| JP2020032781A (ja) | 停車支援装置 | |
| JP4696792B2 (ja) | 車載警報装置 | |
| JP7158655B2 (ja) | 停車支援装置 | |
| CN104553985B (zh) | 汽车转向辅助系统 | |
| JP7468159B2 (ja) | 運転支援装置 | |
| JP2020032784A (ja) | 停車支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170721 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190402 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190627 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190826 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200204 |