以下の例示的な実施形態等の同様の構成要素には共通の符号を付与して、重複する説明を適宜省略する。
<第1実施形態>
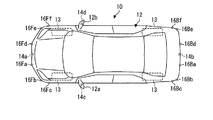
図1は、第1実施形態の車両10を示す平面図である。図1に示すように、車両10は、車体12と、複数(例えば、4個)の車輪13と、1または複数(例えば、4個)の撮像部14a、14b、14c、14dと、1または複数(例えば、8個)の送受信装置16Fa、16Fb、16Fc、16Fd、16Fe、16Ff、16Ba、16Bb、16Bc、16Bd、16Be、16Bfとを有する。撮像部14a、14b、14c、14dを区別する必要がない場合、撮像部14と記載する。送受信装置16Fa〜送受信装置16Bfを区別する必要がない場合、送受信装置16と記載する。
車体12は、乗員が乗車する車室を構成する。車体12は、車輪13、撮像部14及び送受信装置16等の車両10の構成を収容または保持する。
撮像部14は、例えば、CCD(Charge Coupled Device)、または、CIS(CMOS Image Sensor)等の撮像素子を内蔵するデジタルカメラである。撮像部14は、車両10の周辺を撮像した撮像画像のデータを出力する。撮像部14は、車体12の周囲に設けられている。例えば、撮像部14aは、車体12の前端部の左右方向の中央部(例えば、フロントバンパー)に設けられている。撮像部14aは、車両10の前方の周辺を撮像した撮像画像を生成する。撮像部14bは、車体12の後端部の左右方向の中央部(例えば、リアバンパー)に設けられている。撮像部14bは、車両10の後方の周辺を撮像した撮像画像を生成する。撮像部14cは、車体12の左端部の前後方向の中央部(例えば、左側のサイドミラー12a)に設けられている。撮像部14cは、車両10の左方の周辺を撮像した撮像画像を生成する。撮像部14dは、車体12の右端部の前後方向の中央部(例えば、右側のサイドミラー12b)に設けられている。撮像部14dは、車両10の右方の周辺を撮像した撮像画像を生成する。
送受信装置16は、車両10(例えば、車両10の周囲)に設けられている。送受信装置16は、地面または対象物等に検知波を送信し、地面または対象物等に反射された検知波を受信する。例えば、送受信装置16Fa〜16Fcは、車体12の前端部の左側の異なる位置に設けられている。従って、送受信装置16Fa〜16Fcは、車両10の左前方及び左側方の対象物までの距離、及び、車両10の左前端部の車高を測定するための検知波を送受信する。送受信装置16Fd〜16Ffは、車体12の前端部の右側の異なる位置に設けられている。従って、送受信装置16Fd〜16Ffは、車両10の右前方及び右側方の対象物までの距離、及び、車両10の右前端部の車高を測定するための検知波を送受信する。送受信装置16Ba〜16Bcは、車体12の後端部の左側の異なる位置に設けられている。従って、送受信装置16Ba〜16Bcは、車両10の左後方及び左側方の対象物までの距離、及び、車両10の左後端部の車高を測定するための検知波を送受信する。送受信装置16Bd〜16Bfは、車体12の後端部の右側の異なる位置に設けられている。従って、送受信装置16Bd〜16Bfは、車両10の右後方及び右側方の対象物までの距離、及び、車両10の右後端部の車高を測定するための検知波を送受信する。送受信装置16は、検知波を受信すると、検知波の送信と受信との間の時間である送受信時間を算出する。送受信時間は、TOF(=Time Of Fright)とも呼ばれる。
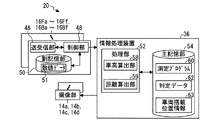
図2は、第1実施形態の車両10に搭載される制御系の構成を説明するブロック図である。図2に示すように、車両10は、対象物検知装置20と、モニタ装置34と、車内ネットワーク38とを更に備える。
対象物検知装置20は、超音波等の検出を送受信することによって、車両10の周囲に存在する対象物までの距離を測定するとともに、車両10の高さである車高を測定する。対象物検知装置20は、送受信装置16と、情報処理装置36とを有する。
情報処理装置36は、ECU(Electronic Control Unit)等のマイクロコンピュータを含むコンピュータである。情報処理装置36は、撮像部14から撮像画像のデータを取得する。情報処理装置36は、撮像画像等に基づいて生成した画像または音声に関するデータをモニタ装置34へ送信する。情報処理装置36は、送受信装置16から取得した送受信時間に基づいて、対象物までの距離及び車高を算出する。
情報処理装置36は、CPU(Central Processing Unit)36aと、ROM(Read Only Memory)36bと、RAM(Random Access Memory)36cと、表示制御部36dと、音声制御部36eと、SSD(Solid State Drive)36fとを備える。CPU36a、ROM36b及びRAM36cは、同一パッケージ内に集積されていてもよい。
CPU36aは、ハードウェアプロセッサの一例であって、ROM36b等の不揮発性の記憶装置に記憶されたプログラムを読み出して、当該プログラムにしたがって各種の演算処理および制御を実行する。CPU36aは、例えば、対象物までの距離及び車高を算出するための測定処理を実行する。
ROM36bは、各プログラム及びプログラムの実行に必要なパラメータ等を記憶する。RAM36cは、CPU36aでの演算で用いられる各種のデータを一時的に記憶する。表示制御部36dは、情報処理装置36での演算処理のうち、主として、撮像部14で得られた画像の画像処理、表示部40に表示させる表示用の画像のデータ変換等を実行する。音声制御部36eは、情報処理装置36での演算処理のうち、主として、音声出力部42に出力させる音声の処理を実行する。SSD36fは、書き換え可能な不揮発性の記憶部であって、情報処理装置36の電源がオフされた場合にあってもデータを維持する。
本実施形態では、情報処理装置36は、ハードウェアとソフトウェア(プログラム)が協働することにより、対象物までの距離及び車高を算出する測定処理を実行する。
モニタ装置34は、車室内のダッシュボード等に設けられている。モニタ装置34は、表示部40と、音声出力部42と、操作入力部44とを有する。
表示部40は、情報処理装置36が送信した画像データに基づいて、画像を表示する。表示部40は、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)、または、有機ELディプレイ(OELD:Organic ElectroLuminescent Display)等の表示装置である。表示部40は、例えば、撮像部14が撮像した車両10の周囲の画像を表示する。
音声出力部42は、情報処理装置36が送信した音声データに基づいて音声を出力する。音声出力部42は、例えば、スピーカである。音声出力部42は、表示部40と異なる車室内の位置に設けられていてもよい。
操作入力部44は、乗員の入力を受け付ける。操作入力部44は、例えば、タッチパネルまたは押しボタン方式のハードスイッチ等である。操作入力部44は、表示部40の表示画面に設けられている。操作入力部44は、表示部40が表示する画像を透過可能に構成されている。これにより、操作入力部44は、表示部40の表示画面に表示される画像を乗員に視認させることができる。操作入力部44は、表示部40の表示画面に表示される画像に対応した位置を乗員が触れることによって入力した指示を受け付けて、情報処理装置36へ送信する。
車内ネットワーク38は、例えば、CAN(Controller Area Network)及びLIN(Local Interconnect Network)等を含む。車内ネットワーク38は、送受信装置16と、情報処理装置36と、操作入力部44とを互いに信号及び情報を送受信可能に電気的に接続する。尚、例えば、LIN(Local Interconnect Network)等で、送受信装置16と、情報処理装置36と、操作入力部44とを、互いに直接接続していてもよい。
図3は、第1実施形態の対象物検知装置20の機能を説明する機能ブロック図である。図3に示すように、複数の送受信装置16のそれぞれは、送受信部46と、制御部48と、副記憶部50とを有する。
送受信部46は、車両10に設けられ、地面または対象物等に検知波を送信するとともに、地面または対象物等に反射された検知波を受信する。送受信部46は、例えば、圧電素子等を有し、超音波を含む音波等の検知波を送受信するソナーである。送受信部46は、検知波をほぼ水平方向に向けて送信して、車両10の周囲に存在する対象物等が反射した検知波を受信する。ここで、送受信部46は、検知波を送信する方向である水平方向のみならず、鉛直方向へも進行させることが可能な指向性の広い検知波を送信する。例えば、送受信部46は、検知波を送信する方向(即ち、ほぼ水平方向)に対して90°以上傾斜した方向へも進行する指向性の広い検知波を送信する。送受信部46は、指向性の広い検知波として、周波数が低い検知波(例えば、40kHz〜70kHz)、または、サイドローブの大きい検知波を送信する。従って、送受信部46は、水平方向に存在する対象物が反射した検知波とともに、下方の地面が反射した検知波を受信する。送受信部46は、受信した検知波の強度を示す受信レベルを制御部48へ出力する。
制御部48は、例えば、IC(Integrated Circuit)等の回路であってよい。制御部48は、送受信部46を制御し、検知波の送信と検知波の受信との間の時間である送受信時間を算出する。
具体的には、制御部48は、送受信部46に送信信号を出力して、検知波を送信させる。制御部48は、送受信部46が検知波を送信した時刻である送信時刻を算出する。検知波を送信した時刻は、検知波の送信を開始した時刻であってよい。例えば、制御部48は、送受信部46に送信信号を出力した時刻、及び、予め設定された送信遅延時間に基づいて、送信時刻を算出してよい。具体的には、制御部48は、送信信号を出力した時刻に送信遅延時間を足した時刻を送信時刻として算出してよい。送信遅延時間は、例えば、制御部48が送信信号を出力した時刻から送受信部46が検知波の送信を開始するまでに要する時間である。送信遅延時間は、予め測定されて副記憶部50の数値データ51の一部として格納されていてよい。
制御部48は、地面及び対象物等によって反射された検知波を受信した送受信部46から当該検知波の受信レベルを時系列で順次取得する。制御部48は、検知波を受信した時刻である受信時刻を算出する。検知波を受信した時刻は、例えば、送受信部46が一時的にピークとなった検知波の波形の受信を開始した時刻である。ここでいうピークは、レベル閾値以上に制限してよい。レベル閾値は、予め定められて副記憶部50の数値データ51の一部として格納されていてよい。
制御部48は、時系列で順次取得する受信レベルのピーク毎に、送信時刻と受信時刻との差分から検知波の送信と検知波の受信との間の時間である送受信時間を算出する。従って、制御部48は、ピークが複数の場合、一の検出波を受信している間に、複数の送受信時間を算出する。制御部48は、算出した1または複数の送受信時間を情報処理装置36へ出力する。制御部48は、送受信時間とピークの受信レベルとを関連付けて情報処理装置36へ出力してもよい。
副記憶部50は、例えば、EPROM(Erasable and Programmable Read-Only Memory)またはEEPROM(Electrically Erasable and Programmable Read-Only Memory)等の書き換え可能な記憶装置である。副記憶部50は、制御部48が送受信時間の算出の処理に必要な送信遅延時間、及び、レベル閾値等の数値データ51等を記憶する。
図3に示すように、情報処理装置36は、処理部52と、主記憶部54とを有する。
処理部52は、例えば、CPU36aの機能として実現される。処理部52は、CPU36a以外のハードウェアプロセッサであってもよい。処理部52は、車高算出部58と、距離算出部59とを有する。処理部52は、主記憶部54に格納された測定プログラム60を読み込むことによって、車高算出部58及び距離算出部59の機能を実現してよい。車高算出部58及び距離算出部59の一部または全ては、ASIC(Application Specific Integrated Circuit)を含む回路等のハードウェアによって構成されてもよい。
車高算出部58は、複数の送受信装置16の制御部48のそれぞれから取得した車高用送受信時間に基づいて、車高を算出する。車高用送受信時間は、制御部48から取得した検知波の送受信時間のうち、車高用判定時間内の検知波の送受信時間のことである。車高用判定時間は、予め定められて、主記憶部54に格納された判定データ62に含まれる。ここで、車高算出部58は、複数の送受信装置16の制御部48のそれぞれの送受信時間に基づいて、車高を算出するので、結果的に複数の車高を算出することになる。
車高算出部58は、複数の送受信部46が受信した検知波のそれぞれに基づいて算出した複数の車高に異常値が含まれているか否かを判定する。車高算出部58は、複数の車高のいずれかが異常値である場合、異常値以外の車高で異常値の車高を補正する。例えば、車高算出部58は、予め設定されて主記憶部54に記憶された送受信部46の車両搭載位置情報63と、複数の送受信部46が受信した検知波のそれぞれに基づいて算出した複数の車高とに基づいて、車両10の傾きを算出し、当該車両10の傾きに基づいて異常値の車高を補正してもよい。尚、車両搭載位置情報63は、車両10における送受信装置16の位置を示す情報である。
車高算出部58は、算出した複数の車高を利用して、他の装置の補正等を実行する。例えば、車高算出部58は、算出した車高に基づいて、撮像部14の光軸を調整して撮像画像を補正するための調整値を設定する。
距離算出部59は、複数の送受信装置16の制御部48のそれぞれから取得した送受信時間に基づいて、対象物までの距離を算出する。尚、距離算出部59は、車高算出部58が車高の算出に用いた車高用送受信時間以外の送受信時間(以下、距離用送受信時間)に基づいて、対象物までの距離を算出してよい。ここで、距離算出部59は、複数の送受信装置16の制御部48のそれぞれから取得した距離用送受信時間に基づいて、対象物までの距離を算出するので、結果的に複数の方向の複数の対象物までの距離を算出することになる。
主記憶部54は、例えば、ROM36b、RAM36c、及び、SSD36fの機能として実現される。主記憶部54は、外部に設けられて、ネットワークを介して接続されていてもよい。主記憶部54は、処理部52が実行するプログラム及びプログラムの実行に必要な情報を記憶する。例えば、主記憶部54は、処理部52が実行する測定プログラム60を記憶する。主記憶部54は、処理部52が測定プログラム60を実行する際に必要な判定データ62及び車両搭載位置情報63を記憶する。判定データ62は、車高を算出するための車高用判定時間等を含む。
図4は、車高算出部58及び距離算出部59による車高及び対象物までの距離の算出方法を説明する図である。図4において、横軸は時刻を示し、縦軸は検知波の受信レベルを示す。細い実線は、制御部48が取得した受信レベルRLを示す。尚、受信レベルRLは、連続した線で示しているが、不連続な値であってもよい。太い点線は、判定データ62が示すレベル閾値Th1を示す。レベル閾値Th1は、不連続な値であってもよい。
制御部48は、送受信部46に送信信号を出力して、検知波の送信レベルが最大となる送信時刻を算出する。尚、図4において、送信時刻は、横軸の原点である。
制御部48は、反射された検知波の受信レベルRLを時系列で送受信部46から取得して、検知波の受信レベルRLがレベル閾値Th1以上のピークとなったピーク時刻PT1、PT2、PT3を検出する。ピーク時刻PT1、PT2、PT3を区別する必要がない場合、ピーク時刻PTと記載する。
制御部48は、時系列で順次取得する受信レベルのピーク毎に、送信時刻と受信時刻との差分から検知波の送信と検知波の受信との間の時間である送受信時間を算出する。図4では、送信時刻が“0”なので、受信時刻は送受信時間となる。
車高算出部58及び距離算出部59は、送受信時間及び車高用判定時間に基づいて、車高及び対象物までの距離を算出する。
図4において、車高用判定時間は、時刻T1aから時刻T1bまでの時間であって、車高を算出するための時間である。時刻T1bは、例えば、車高の最高値に対応付けて設定される。車高の最高値とは、例えば、車両10に何も積載されていない状態での車高である。時刻T1aは、例えば、検知波の送信による圧電素子の振動がほぼ終了する時間よりも長く、かつ、車高の最低値に対応付けて設定される。車高の最低値とは、例えば、車両10に最大積載量の負荷が作用している状態での車高である。従って、車高の最低値とは、車両10に最大積載量の負荷が作用している状態での車両10の沈み量を、車高の最高値から引いた値でもある。車両10の沈み量の一例は、数cmから数十cmである。最大の沈み量に対応する送受信時間が、“dT”である。
車高算出部58は、制御部48が算出した送受信時間のうち、車高用判定時間内の車高用送受信時間に基づいて、車高を算出する。具体的には、車高算出部58は、車高用送受信時間と、検知波の速度との積の1/2を車高として算出する。検知波が超音波の場合、検知波の速度は音速となる。
距離算出部59は、制御部48が算出した送受信時間のうち、車高用送受信時間以外の送受信時間である距離用送受信時間に基づいて、対象物までの距離を算出する。具体的には、距離算出部59は、距離用送受信時間と、検知波の速度との積の1/2を各対象物までの距離として算出する。
図5は、対象物検知装置20が実行する第1実施形態の測定処理のフローチャートである。図5の左側は、各送受信装置16の制御部48が実行するフローチャートである。図5の右側は、情報処理装置36の処理部52が実行するフローチャートである。処理部52は、車両10の起動時に、主記憶部54に格納された測定プログラム60を読み込むことによって、第1実施形態の測定処理を実行する。
図5に示すように、第1実施形態の測定処理では、各送受信装置16の制御部48が、送受信部46に送信信号を出力する(S1102)。これにより、送信信号を取得した送受信部46は、検知波を送信する。
制御部48は、検知波を送信した送受信部46から受信レベルRLを取得する(S1104)。制御部48は、検知波の受信が終了したか否かを判定する(S1106)。制御部48は、例えば、送信信号を出力してから予め定められた時間が経過したら、検知波の受信が終了したと判定してよい。また、制御部48は、送受信部46からの受信レベルRLの取得が終了したら検知波の受信が終了したと判定してもよい。制御部48は、検知波の受信が終了したと判定するまで(S1106:No)、ステップS1104以降を繰り返して、受信レベルRLを時系列で順次取得する。
制御部48は、検知波の受信が終了したと判定すると(S1106:Yes)、取得した受信レベルRLのピーク毎に送受信時間を算出して(S1108)、自己の識別情報に関連付けて受信レベルRL及び送受信時間を情報処理装置36へ出力する(S1110)。
情報処理装置36の処理部52では、車高算出部58及び距離算出部59が、送受信装置16の制御部48から送受信時間を取得する(S2102)。車高算出部58は、取得した送受信時間のうち、車高用判定時間内の送受信時間である車高用送受時間と検知波の速度とに基づいて、車高を算出する(S2104)。距離算出部59は、取得した送受信時間のうち、車高用判定時間外の送受信時間(即ち、車高用送受時間以外の送受信時間)である距離用送受信時間と検知波の速度とに基づいて、対象物までの距離を算出する(S2106)。
距離算出部59は、全ての距離用送受信時間に基づく対象物までの距離の算出が終了したか否かを判定する(S2108)。距離算出部59は、全ての対象物までの距離の算出が終了していないと判定すると(S2108:No)、ステップS2106を繰り返す。
次に、距離算出部59は、全ての対象物までの距離の算出が終了したと判定すると(S2108:Yes)、車高算出部58及び距離算出部59は、全ての送受信装置16の全ての送受信時間に対して、ステップS2104〜ステップS2108の処理を実行したか否かを判定する(S2110)。車高算出部58及び距離算出部59は、全ての送受信装置16に対して、当該処理を実行したと判定するまで、ステップS2104〜ステップS2108の処理を各送受信装置16に対して実行して、複数の車高及び複数の対象物までの距離を算出する(S2110:No)。
車高算出部58及び距離算出部59は、全ての送受信装置16に対して、ステップS2104〜ステップS2108の処理を実行したと判定すると(S2110:Yes)、車高算出部58は、複数の車高のいずれかが異常値か否かを判定する(S2112)。例えば、車高算出部58は、算出した複数の車高のうち、いずれかの車高と他の複数の車高の平均値との差分の絶対値が予め設定された車高差分閾値よりも大きい場合、当該車高が異常値であると判定してよい。車高算出部58は、全ての車高が異常値でないと判定した場合(S2112:No)、ステップS2116を実行する。
車高算出部58は、いずれかの車高が異常値であると判定すると(S2112:Yes)、異常値と判定した車高を補正する(S2114)。例えば、車高算出部58は、複数の送受信装置16の検知波に基づいて算出した異常値でない複数の車高から車両10の傾きを算出する。車高算出部58は、算出した車両10の傾きに基づいて、異常値の車高を補正してよい。例えば、車高算出部58は、送受信装置16Fdの検知波から算出した車高が異常値であると判定すると、送受信装置16Fdの両側で隣接する送受信装置16Fa及び送受信装置16Feの検知波から算出した2個の車高から算出した車両10の傾きと、車両搭載位置情報63が示す送受信装置16Fdの位置とに基づいて、送受信装置16Fdの位置の車高を補正する。
車高算出部58は、補正後の車高の利用処理を実行する(S2116)。例えば、車高算出部58は、車高に基づいて、車両10の傾斜等を算出して、撮像部14の光軸を調整して撮像画像を補正するための調整値を算出する。これにより、処理部52は、測定処理を終了する。
上述したように、対象物検知装置20では、車高算出部58及び距離算出部59が、車高用判定時間に基づいて、車高及び対象物までの距離を算出している。これにより、車高算出部58は、車高用判定時間内の車高用送受信時間に基づいて、車高を精度よく算出できる。また、距離算出部59は、車高用判定時間以外の距離用送受信時間に基づいて、対象物までの距離を精度よく算出できる。この結果、対象物検知装置20は、一の装置で車高及び対象物までの距離を算出できるので、装置の構成を簡略化できる。
対象物検知装置20では、車高算出部58は、複数の送受信装置16が受信した検知波のそれぞれに対して、車高を算出する。これにより、車高算出部58は、算出した複数の車高に基づいて、複数の車高に異常値が含まれているかを判定できる。更に、車高算出部58は、車高に異常値が含まれている場合、異常値の車高を他の複数の車高によって補正することができる。この結果、対象物検知装置20は、より精度の高い車高の算出を実現できる。
車高算出部58は、車高の補正において、複数の送受信装置16の車高用送受信時間から算出した異常値でない複数の車高から算出した車両10の傾きに基づいて、異常値と判定した車高を補正する。これにより、車高算出部58は、送受信装置16の位置に応じてより精度の高い車高の補正を実現できる。
<第2実施形態>
図6は、第2実施形態の対象物検知装置120の機能を説明する機能ブロック図である。図6に示すように、第2実施形態の対象物検知装置120の送受信装置116Ba〜116Bf、116Fa〜116Ffは、それぞれ周波数切替部70を更に備える。送受信装置116Ba〜116Bf、116Fa〜116Ffの配置は、送受信装置16Ba〜16Bf、16Fa〜16Ffの配置と同様である。送受信装置116Ba〜116Bf、116Fa〜116Ffを区別する必要がない場合、送受信装置116と記載する。各周波数切替部70は、いずれかの送受信部46と制御部148とに接続されている。
制御部148は、車高算出用の送信信号である車高用送信信号と、対象物までの距離算出用の送信信号である距離用送信信号とを異なるタイミングで周波数切替部70へ出力する。例えば、制御部148は、車高用送信信号を車両10の起動時に出力する。制御部148は、車高用送信信号を出力して車高算出部58が車高を算出した後、距離用送信信号を出力する。
周波数切替部70は、制御部148からの送信信号に基づいて、送受信部46が送信する検知波の周波数を切り替える。具体的には、周波数切替部70は、制御部148から車高用送信信号を取得すると、車高を測定するための車高用周波数の検知波を送受信部46に送信させる。周波数切替部70は、制御部148から距離用送信信号を取得すると、対象物までの距離を測定するための距離用周波数の検知波を送受信部46に送信させる。即ち、周波数切替部70は、送受信部46が送信する検知波の周波数を、車高用周波数と距離用周波数とで切り替える。ここで、距離用周波数は、車高用周波数よりも高い。例えば、距離用周波数は、車高用周波数よりも20%〜30%程度高くてよい。従って、車高用周波数の検知波の指向性は、距離用周波数の検知波の指向性よりも広い。車高用周波数の検知波は、例えば、第1実施形態の検知波と同じであってよい。
車高算出部58及び距離算出部59は、検知波の送受信時間、検知波の受信レベル及び主記憶部54に格納された判定データ62に含まれる車高用判定時間に基づいて、車高及び対象物までの距離を算出する。
図7は、第2実施形態の距離用周波数の検知波における受信レベルRLを示すグラフである。図7において、横軸は時刻を示し、縦軸は検知波の受信レベルを示す。
距離用周波数の検知波は、車高用周波数の検知波よりも指向性が狭く、下方に進行する割合が小さいので、図7に示すように、車高を算出するための時刻PT1のピークが小さくなる。また、距離用周波数は車高用周波数よりも高いので、距離用周波数の検知波は、車高用周波数の検知波よりも減衰率が大きくなる。従って、距離用周波数の検知波の受信レベルは、全体的に車高用周波数の検知波の受信レベルよりも小さくなる。このため、距離用周波数の検知波のためのレベル閾値Th2は、車高用周波数の検知波のためのレベル閾値Th1より小さくてもよい。
距離用周波数における車高用判定時間を規定する時刻T1a及び時刻T1bは、車高用周波数における対応する各時刻T1a、T1bと同じであってよい。
図8は、各送受信装置116の制御部148が実行する第2実施形態の測定処理のフローチャートである。情報処理装置36の処理部52が実行する処理については第1実施形態とほぼ同様なので省略する。第1実施形態の制御部48と同様の第2実施形態の処理については、同じステップ番号を付与して説明を簡略化する。
図8に示すように、第2実施形態の測定処理では、各送受信装置116の制御部148が、周波数切替部70に車高用送信信号を出力する(S1202)。これにより、車高用送信信号を取得した周波数切替部70は、送受信部46に車高用周波数の検知波を送信させる。
次に、制御部148は、送受信部46が受信した車高用周波数の検知波に基づいて、車高を算出するための送受信時間を算出して情報処理装置36へ出力する(S1104〜S1110)。尚、当該送受信時間には、車高用送受信時間が少なくとも含まれていればよく、距離用送受信時間が含まれていてもよい。
制御部148は、車高に関する処理を終了すると、距離用送信信号を出力する(S1203)。これにより、距離用送信信号を取得した周波数切替部70は、送受信部46に距離用周波数の検知波を送信させる。
制御部148は、ステップS1104〜ステップS1110とほぼ同様の処理であるステップS1204〜ステップS1210を送受信部46が受信した距離用周波数の検知波に対して実行して、対象物までの距離を算出するための送受信時間を算出して情報処理装置36へ出力する(S1204〜S1210)。
制御部148は、車両10が停止したか否かを判定する(S1222)。制御部148は、車両10が停止していないと判定すると(S1222:No)、送受信部46へ距離用送信信号を出力して(S1203)、ステップS1204以降を繰り返す。これにより、制御部148は、車両10が停止するまで、送受信部46に距離用送信信号を出力して、送受信部46が送信した距離用周波数の検知波に基づいて、対象物までの距離を算出するための送受信時間を算出する。尚、当該送受信時間には、距離用送受信時間が少なくとも含まれていればよく、車高用送受信時間が含まれていてもよい。
制御部148は、車両10が停止したと判定すると(S1222:Yes)、処理を終了する。
上述したように、対象物検知装置120では、周波数切替部70が、送受信装置116が送信する検知波の周波数を車高用周波数と車高用周波数よりも高い距離用周波数とで切り替えて、検知波の指向性を切り替えることができる。例えば、対象物検知装置120は、車高を算出する場合、距離用周波数よりも低い車高用周波数の検知波によって指向性を広くしている。これにより、対象物検知装置120は、車高を算出する場合、対象物が反射した検知波の受信レベルRLに対する、地面が反射した検知波の受信レベルRLの比率を大きくすることができる。一方、対象物検知装置120は、対象物までの距離を算出する場合、車高用周波数よりも高い距離用周波数の検知波によって指向性を狭くしている。これにより、対象物検知装置120は、対象物までの距離を算出する場合、地面が反射した検知波の受信レベルに対する、対象物が反射した検知波の受信レベルRLの比率を大きくすることができる。
従って、対象物検知装置120は、車高を算出するときに、地面が反射した受信レベルRLの高い検知波によって車高の算出精度を向上させることができる。また、対象物検知装置120は、対象物までの距離を算出するときに、対象物が反射した受信レベルRLの高い検知波によって対象物までの距離の算出精度を向上させることができる。
<第3実施形態>
次に、距離算出部59の距離の算出方法を一部変更した第3実施形態について説明する。図9は、第3実施形態の距離算出部59による対象物までの距離の算出方法を説明するグラフである。第3実施形態の各構成は、第1実施形態の各構成の符号で説明する。
図9に示すように、車高とほぼ同じ距離に対象物が存在する場合、地面が反射した検知波及び対象物が反射した検知波の両方を送受信部46が受信するので、車高用判定時間内のピーク(ここでは、時刻PT1のピーク)が、当該対象物が存在しない場合の検知波のピーク(点線参照)に対して大きくなる。
第3実施形態の距離算出部59は、送受信装置16の制御部48から取得した車高用判定時間内のピークの送受信時間及び受信レベルRLに基づいて、車高とほぼ同じ距離に存在する対象物までの距離を算出してよい。具体的には、距離算出部59は、車高用判定時間内の検知波のピークの受信レベルが予め設定された判定用閾値Th3以上であれば、当該ピークの送受信時間に基づいて、対象物までの距離を算出してよい。これにより、第3実施形態の対象物検知装置20は、車高とほぼ同じ距離に存在する対象物の距離を算出することができる。判定用閾値Th3は、レベル閾値Th1よりも大きく、地面からの反射のみの受信レベルよりも大きいことが好ましい。
また、車高用判定時間内において、当該対象物が存在しない検知波のピークと対象物が存在する場合の検知波のピークとの差分が大きくなるので、距離算出部59は、当該差分に基づいて、車高とほぼ同じ距離に対象物が存在するか否かを判定してもよい。具体的には、距離算出部59は、車高用判定時間内におけるいずれかの送受信装置16の送受信部46が受信した検知波のピークの受信レベルRLと、他の送受信装置16の送受信部46が受信した検知波のピークの受信レベルRLとの差分であるレベル差分を算出する。距離算出部59は、当該レベル差分が予め定められたレベル差分閾値以上であれば、車高とほぼ同じ距離に対象物が存在すると判定して、車高用判定時間内のレベル差分閾値以上の検知波のピークの送受信時間に基づいて、対象物までの距離を算出してよい。これにより、第3実施形態の対象物検知装置20は、車高とほぼ同じ距離に存在する対象物の距離を算出することができる。
上述した各実施形態の構成の機能、接続関係、個数、配置等は、発明の範囲及び発明の範囲と均等の範囲内で適宜変更、削除等してよい。各実施形態を適宜組み合わせてもよい。各実施形態の各ステップの順序を適宜変更してよい。
上述の実施形態では、送受信装置16が12個の例を挙げて説明したが、送受信装置16の個数は適宜変更してよい。
上述の実施形態では、車高算出部58が、複数の車高から算出した車両10の傾きに基づいて異常値の車高を補正する例を挙げたが、車高の補正はこれに限定されない。例えば、車高算出部58は、異常値の車高の検知波を送受信した送受信装置16の両側で隣接する送受信装置16が受信した検知波の送受信時間から算出した車高と送受信装置16の位置との関数である一次関数に基づいて、異常値の車高を補正してよい。例えば、車高算出部58は、送受信装置16Fdの検知波から算出した車高が異常値であると判定すると、送受信装置16Fa及び送受信装置16Feの検知波から算出した2個の車高と、送受信装置16Fa及び送受信装置16Feの位置との関係を示す一次関数を算出する。車高算出部58は、当該一次関数に送受信装置16Fdの位置を代入することによって得られた車高を、送受信装置16Fdの位置の車高として補正する。これにより、車高算出部58は、異常値の車高の要因となった送受信装置16Fdの位置に応じたより精度の高い車高の補正を実現できる。
送受信装置16が、受信レベルRLを増幅する増幅器(即ち、アンプ)を有してもよい。この場合、送受信装置16は、対象物の距離が長くなるにつれ減少する受信レベルRLが一定になるように、増幅器によって、受信レベルRLを増幅してもよい。
上述の実施形態では、局所的に閾値が凹凸する閾値関数を例に挙げて説明したが、これに限定されない。例えば、閾値関数は、送受信時間が大きくなるにつれて、閾値が徐々に小さくなってもよい。
上述の実施形態では、制御部48、148が送受信装置16、116に設けられている例を挙げたが、これに限定されない。例えば、制御部48、148は、情報処理装置36の処理部52に設けられていてもよい。この場合、制御部48、148は、検知波の送信時刻、及び、受信した検知波の強度を示す受信レベルを時系列で送受信装置16、116から取得して、送受信時間を算出してよい。
上述の実施形態では、車高用判定時間を規定する時刻T1a及び時刻T1bが1組の例を挙げたが、これに限定されない。例えば、車高用判定時間を規定する複数組の時刻T1aから時刻T1bが、音速を変化させる温度に対応付けられて予め設定されていてもよい。
上述の第1実施形態では、レベル閾値Th1が一つの例を挙げたが、これに限定されない。例えば、複数のレベル閾値Th1が、検知波のレベルを変化させる湿度に対応付けられて、予め設定されていてもよい。具体的には、湿度が高いほど、レベル閾値Th1は低くしてよい。同様に、複数のレベル閾値Th2及び判定用閾値Th3が、検知波のレベルを変化させる湿度に対応付けられて、予め設定されていてもよい。