JP2018200312A - 計時器用機構 - Google Patents
計時器用機構 Download PDFInfo
- Publication number
- JP2018200312A JP2018200312A JP2018097677A JP2018097677A JP2018200312A JP 2018200312 A JP2018200312 A JP 2018200312A JP 2018097677 A JP2018097677 A JP 2018097677A JP 2018097677 A JP2018097677 A JP 2018097677A JP 2018200312 A JP2018200312 A JP 2018200312A
- Authority
- JP
- Japan
- Prior art keywords
- lock member
- segment
- lever
- input
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B27/00—Mechanical devices for setting the time indicating means
- G04B27/001—Internal gear therefor, e.g. for setting the second hand or for setting several clockworks
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B5/00—Automatic winding up
- G04B5/02—Automatic winding up by self-winding caused by the movement of the watch
- G04B5/18—Supports, suspensions or guide arrangements, for oscillating weights
- G04B5/181—The bearing of the rocking bar is in the centre of rotation combined with a support or guide arrangement
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B13/00—Gearwork
- G04B13/005—Gearwork where a revolution in both directions is changed into a revolution in one direction
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B13/00—Gearwork
- G04B13/001—Gearwork with the choice of adjustable or varying transmission ratio
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B19/00—Indicating the time by visual means
- G04B19/02—Back-gearing arrangements between gear train and hands
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B19/00—Indicating the time by visual means
- G04B19/06—Dials
- G04B19/08—Geometrical arrangement of the graduations
- G04B19/082—Geometrical arrangement of the graduations varying from the normal closed scale
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B5/00—Automatic winding up
- G04B5/02—Automatic winding up by self-winding caused by the movement of the watch
- G04B5/10—Automatic winding up by self-winding caused by the movement of the watch by oscillating weights the movement of which is not limited
- G04B5/14—Automatic winding up by self-winding caused by the movement of the watch by oscillating weights the movement of which is not limited acting in both directions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06G—ANALOGUE COMPUTERS
- G06G3/00—Devices in which the computing operation is performed mechanically
- G06G3/04—Devices in which the computing operation is performed mechanically for performing multiplications or divisions, e.g. variable-ratio gearing
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Geometry (AREA)
- Electric Clocks (AREA)
- Transmission Devices (AREA)
- Mechanical Control Devices (AREA)
Abstract
Description
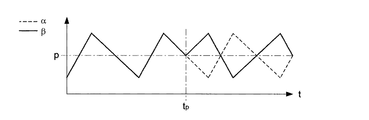
β=2p−α
パーミュテーション値pがゼロである特定の場合、出力値βは入力値αの逆の値である。
2 第1のロックメンバー
3 第2のロックメンバー
4 制御デバイス
5 フィーラー
6 カム
7 第2の歯付きセグメント
8 ピン
9 フック
10 ノッチ
12 オブロング状の開口
13 マルタクロス
14 インデックス用フィンガー
15 レバーアーム
16 先端
17 歯列
18 ラック
ABCD ひし形構造
Claims (14)
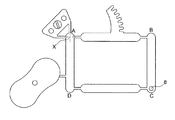
- 変形可能なひし形構造(ABCD)、レバー(1)、第1のロックメンバー(2)、第2のロックメンバー(3)、及び制御デバイス(4)とを有する計時器用機構であって、
前記ひし形構造(ABCD)は、出力セグメント(AB)と、その出力セグメント(AB)に隣接している入力セグメント(AD)とを含む共面の4つのセグメントを有し、これらのセグメントは対ごとに、その対の間の頂角にて回転可能に接続しており、
前記出力セグメント(AB)と前記入力セグメント(AD)の両方は、前記ひし形構造の平面に垂直であり第1の頂角(A)を通り抜ける回転軸(X)のまわりを回転し、
前記第1の頂角(A)は、前記出力セグメント(AB)と前記入力セグメント(AD)の両方によって共有され、前記ひし形構造(ABCD)の平面内の移動をロックされており、
前記レバー(1)は、前記回転軸(X)のまわりを回転するようにマウントされ、
前記レバー(1)は、前記回転軸(X)のまわりを回転するように、前記第1の頂角(A)の対角である前記ひし形構造の第2の頂角(C)に運動学的に接続されており、
前記第1のロックメンバー(2)は、前記レバー(1)が前記回転軸(X)のまわりの回転をしないようにロックされる第1のロック位置と、前記第1のロックメンバー(2)が前記レバー(1)の回転を妨げない第1のアンロック位置との間を動くことができ、
前記第2のロックメンバー(3)は、前記第2の頂角(C)が前記回転軸(X)を中心とする半径方向の移動をロックされる第2のロック位置と、前記第2のロックメンバー(3)が前記第2の頂角(C)の半径方向の運動を妨げない第2のアンロック位置との間を動くことができ、
当該機構は、前記第1のロックメンバー(2)と前記第2のロックメンバー(3)の一方は、前記第1のロックメンバー(2)と前記第2のロックメンバー(3)の他方がそのアンロック位置にあるときに、そのロック位置にあり、
前記制御デバイス(4)は、前記第1のロックメンバー(2)の第1のロック位置と第1のアンロック位置の間の運動を制御することができ、
前記出力セグメント(AB)の角位置は、前記第1のロックメンバー(2)が第1のアンロック位置にあるときに入力値と同様な形態で変化し、前記第1のロックメンバー(2)が第1のロック位置にあるときに前記入力値と逆に変化する出力値を表し、
前記入力値は、前記入力セグメント(AD)の角位置によって表される
ことを特徴とする機構。 - 前記制御デバイス(4)に当接する前記第1のロックメンバー(2)を保持するように意図された第1の戻し手段を有する
ことを特徴とする請求項1に記載の機構。 - 前記制御デバイス(4)と前記第1のロックメンバー(2)の間にデスモドロミックリンクを有する
ことを特徴とする請求項1に記載の機構。 - 前記第2のロックメンバー(3)をその第2のロック位置に保持するように意図された第2の戻し手段を有する
ことを特徴とする請求項1に記載の機構。 - 前記第1のロックメンバー(2)は、前記第1のロックメンバー(2)がその第1のロック位置に動いたときに、前記第2のロックメンバー(3)をその第2のアンロック位置に動かすように構成している
ことを特徴とする請求項1に記載の機構。 - 前記入力セグメント(AD)は、計時器用ムーブメント又はユーザーによって回転駆動されるように意図されたカム(6)の輪郭を追従するように構成しているフィーラー(5)と一体化されている
ことを特徴とする請求項1に記載の機構。 - 前記入力セグメント(AD)は、その入力セグメント(AD)の角位置によって表される入力値を受けることができる第1の歯付きセグメントと一体化されている
ことを特徴とする請求項1に記載の機構。 - 前記出力セグメント(AB)は、その出力セグメント(AB)の角位置によって表される出力値を伝達することができる第2の歯付きセグメント(7)と一体化されている
ことを特徴とする請求項1に記載の機構。 - 前記出力セグメント(AB)と一体化されており前記出力セグメント(AB)の角位置によって表される出力値をインジケートすることができるガイドマークを有する
ことを特徴とする請求項1に記載の機構。 - 前記レバー(1)には、前記回転軸(X)を中心とする半径方向に延在しているオブロング状の開口(12)があり、このオブロング状の開口(12)は、前記ひし形構造の第3のセグメント(DC)と第4のセグメント(CB)を、第2の頂角(C)によって形成されるそれらの頂角によって、回転可能に接続するピン(8)を少なくとも部分的に収容している
ことを特徴とする請求項1に記載の機構。 - 前記第2のロックメンバー(3)は、前記レバー(1)上で回転し、前記ピン(8)と連係するフック(9)を有し、これによって、前記半径方向の移動をしないように前記ピン(8)をロックする
ことを特徴とする請求項1に記載の機構。 - 前記第1のロックメンバー(2)は、前記レバー(1)に対して回転し、前記第1のロックメンバー(2)には、前記レバー(1)と連係するノッチ(10)があり、これによって、前記回転軸(X)のまわりの前記レバー(1)の回転をブロックする
ことを特徴とする請求項1に記載の機構。 - 前記第1のロックメンバー(2)と前記第2のロックメンバー(3)には、複数のノッチ又はフックがある
ことを特徴とする請求項11又は12に記載の機構。 - 前記第1のロックメンバー(2)と前記第2のロックメンバー(3)のそれらのロック位置とアンロック位置の間の運動が発生する入力値を変えることができる
ことを特徴とする請求項1に記載の機構。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17173324.9 | 2017-05-29 | ||
| EP17173324.9A EP3410231B1 (fr) | 2017-05-29 | 2017-05-29 | Mécanisme d'horlogerie |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018200312A true JP2018200312A (ja) | 2018-12-20 |
| JP6533851B2 JP6533851B2 (ja) | 2019-06-19 |
Family
ID=59009527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018097677A Active JP6533851B2 (ja) | 2017-05-29 | 2018-05-22 | 計時器用機構 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10606215B2 (ja) |
| EP (1) | EP3410231B1 (ja) |
| JP (1) | JP6533851B2 (ja) |
| CN (1) | CN108931911B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025066051A (ja) * | 2023-10-10 | 2025-04-22 | モントレー ブレゲ・エス アー | ロック可能なジョイントを含む時計ムーブメントのコンポーネント |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3486735B1 (fr) * | 2017-11-20 | 2020-09-30 | Montres Breguet S.A. | Mécanisme horloger de remise à zéro de la seconde à came en colimaçon |
| EP3605243A1 (fr) * | 2018-07-31 | 2020-02-05 | Montres Breguet S.A. | Mecanisme d'affichage d'horlogerie a geometrie variable avec aiguille elastique |
| EP3869280B1 (fr) * | 2020-02-19 | 2024-04-17 | Montres Breguet S.A. | Mecanisme d'affichage d'horlogerie |
| EP4336274B1 (fr) * | 2022-09-08 | 2025-05-28 | Montres Breguet S.A. | Mecanisme d'actionnement pour une aiguille d'affichage flexible |
| CH721553A1 (fr) * | 2024-01-26 | 2025-07-31 | Richemont Int Sa | Dispositif d'affichage pour mouvement horloger |
| EP4650884A1 (fr) * | 2024-05-16 | 2025-11-19 | Patek Philippe Sa Geneve | Mécanisme d'entraînement pour affichage sautant |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5335499Y2 (ja) * | 1974-01-23 | 1978-08-30 | ||
| USD357883S (en) * | 1994-03-08 | 1995-05-02 | Krauss Kenneth W | Clock hand |
| CH694175A5 (fr) * | 1999-12-16 | 2004-08-13 | Agenhor Sa | Affichage rétrograde. |
| EP1637942A1 (fr) * | 2004-09-15 | 2006-03-22 | Frédéric Piguet S.A. | Pièce d'horlogerie à quantième comprenant un dispositif d'équation du temps marchante |
| EP1777598B1 (fr) * | 2005-10-21 | 2012-02-15 | Rolex Sa | Pièce d'horlogerie munie d'un mécanisme de mesure de durées prédéterminées réglables |
| JP5918394B2 (ja) * | 2012-02-27 | 2016-05-18 | ブランパン・エス アー | ユニバーサル作動均時差機構及びこれをセットする方法 |
| EP2824521B1 (fr) * | 2013-07-12 | 2025-03-26 | Rolex Sa | Mécanisme horloger, mouvement horloger et pièce d'horlogerie |
| CH713069A2 (fr) * | 2016-10-25 | 2018-04-30 | Eta Sa Mft Horlogere Suisse | Montre mécanique avec résonateur rotatif isochrone, insensible aux positions. |
| EP3410232B1 (fr) * | 2017-05-29 | 2021-07-21 | Montres Breguet S.A. | Mécanisme d'horlogerie |
-
2017
- 2017-05-29 EP EP17173324.9A patent/EP3410231B1/fr active Active
-
2018
- 2018-05-07 US US15/972,285 patent/US10606215B2/en active Active
- 2018-05-22 JP JP2018097677A patent/JP6533851B2/ja active Active
- 2018-05-28 CN CN201810520986.3A patent/CN108931911B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025066051A (ja) * | 2023-10-10 | 2025-04-22 | モントレー ブレゲ・エス アー | ロック可能なジョイントを含む時計ムーブメントのコンポーネント |
| JP7780592B2 (ja) | 2023-10-10 | 2025-12-04 | モントレー ブレゲ・エス アー | ロック可能なジョイントを含む時計ムーブメントのコンポーネント |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108931911A (zh) | 2018-12-04 |
| EP3410231B1 (fr) | 2021-06-30 |
| CN108931911B (zh) | 2020-06-19 |
| US10606215B2 (en) | 2020-03-31 |
| JP6533851B2 (ja) | 2019-06-19 |
| EP3410231A1 (fr) | 2018-12-05 |
| US20180341224A1 (en) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018200312A (ja) | 計時器用機構 | |
| CN110419008B (zh) | 调节钟表功能的调节装置 | |
| JP2011529559A (ja) | 回転可能な部材のロック装置 | |
| JP2003518716A5 (ja) | ||
| US20240401375A1 (en) | Motored locking mechanism | |
| GB2642633A (en) | Curvature adjustment mechanism and display screen | |
| US5680649A (en) | Lens driving device for auto-focus camera | |
| US2293299A (en) | Preselecting mechanism | |
| US4350030A (en) | Luggage case resettable sequential combination lock | |
| US215229A (en) | Improvement in permutation-locks | |
| HK40008020A (en) | Timepiece mechanism | |
| HK40008020B (en) | Timepiece mechanism | |
| JP2010037816A (ja) | 符号錠装置 | |
| JPH07100984B2 (ja) | 符号錠装置 | |
| US3491605A (en) | Rotational sensing clutch mechanism | |
| CN202850557U (zh) | 一种遥控车位锁的传动与锁紧机构 | |
| JP3310965B2 (ja) | アクチュエータユニット | |
| US1117361A (en) | Speed control for motors. | |
| JP3254969U (ja) | ディスプレイスクリーンおよびラジアン調整機構 | |
| US3938396A (en) | Programmable multiple step indexing drive mechanism | |
| US2539509A (en) | Printing telegraph apparatus | |
| US1039227A (en) | Counter. | |
| US2330049A (en) | hagelin | |
| US2857097A (en) | Synchronizing overtravel mechanism | |
| US1043176A (en) | Transmission-gear. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6533851 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |