JP2019018796A - 駐車制御方法及び駐車制御装置 - Google Patents
駐車制御方法及び駐車制御装置 Download PDFInfo
- Publication number
- JP2019018796A JP2019018796A JP2017141089A JP2017141089A JP2019018796A JP 2019018796 A JP2019018796 A JP 2019018796A JP 2017141089 A JP2017141089 A JP 2017141089A JP 2017141089 A JP2017141089 A JP 2017141089A JP 2019018796 A JP2019018796 A JP 2019018796A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering
- parking
- command
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
【解決手段】駐車経路を車両Vに移動させて駐車させる駐車制御方法であって、車両Vが停止している第1状態から移動が開始された第2状態に移行する際に、車両Vの操舵装置50に操舵命令を実行させる。
【選択図】 図1
Description
本実施形態では、本発明に係る駐車制御装置を、駐車制御システムに適用した場合を例にして説明する。駐車制御装置は、車載装置と情報の授受が可能な可搬の操作端末(スマートフォン、PDA:Personal Digital Assistantなどの機器)に適用してもよい。また、本発明に係る駐車制御方法は後述する駐車制御装置において使用できる。
操作端末5は、ディスプレイ53を備える。ディスプレイ53は、入力インターフェイス、各種情報を提示する。ディスプレイ53がタッチパネル型のディスプレイである場合には、操作指令を受け付ける機能を有する。
操作端末5は、本実施形態の駐車制御方法に用いられる操作指令の入力を受け付けるとともに、駐車制御装置100へ向けて操作指令を送出するアプリケーションがインストールされたスマートフォン、PDA:Personal Digital Assistantなどの携帯型の機器であってもよい。
本実施形態の駐車制御装置100は、操舵操作、アクセル・ブレーキ操作が自動的に行われる自動制御タイプであってもよい。駐車制御装置100は、操舵操作を自動で行い、アクセル・ブレーキ操作をドライバが行う半自動タイプであってもよい。
本実施形態の駐車制御プログラムでは、ユーザが目標駐車スペースを任意に選択してもよいし、駐車制御装置100又は駐車設備側が目標駐車スペースを自動的に設定してもよい。
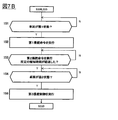
図2は、本実施形態に係る駐車制御システム1000が実行する駐車制御処理の制御手順を示すフローチャートである。駐車制御処理の開始のトリガは、特に限定されず、駐車制御装置100の起動スイッチが操作されたことをトリガとしてもよい。
本実施形態において駐車経路が算出可能であるとは、障害物(駐車車両を含む)と干渉することなく、現在位置から目標駐車スペースに至る経路の軌跡を路面座標に描けることである。
このステップにおいて、制御装置10は、駐車経路上を車両Vに移動させるための車両Vの制御命令を算出する。制御命令は、車両Vの操舵量、操舵速度、操舵加速度、シフトポジション、速度、加速度、及び減速度のうちの何れか一つ以上についての動作命令を含む。また、制御命令は、上記車両Vの動作命令の実行タイミング又は実行位置を含む。
具体的には、駐車制御開始地点VSにおいては、操舵命令における操舵方向は、切り返し地点VTに至る駐車経路の方向に沿う。操舵命令における操舵方向と、駐車制御開始地点VSから切り返し地点VTに至る方向との差は所定角度未満である。
切り返し地点VTにおいては、操舵命令における操舵方向は、切り返し地点VTから目標駐車スペースVPに至る駐車経路の方向に沿う。操舵命令における操舵方向と、切り返し地点VTから目標駐車スペースVPに至る方向との差は所定角度未満である。
操舵命令の実行後のタイヤの切れ角は、車両Vの移動方向と共通するので、車外の者はタイヤの切れ角を見て、その車両Vの進行方向を推測できる。操舵方向が共通するので、車両Vが動き出すことを車外の者に知らせるために操舵命令を実行しても、駐車経路に沿って移動する車両Vの動きを妨げることがない。加えて、図3(b)に示したように、操舵命令における操舵方向が、駐車経路RTの曲線の旋回方向に沿う場合には、操舵命令の実行により車両Vを旋回させることができるので、駐車経路RTの長さを短くできる。結果として駐車完了までの時間を短縮できる。
操舵タイミングとしては、(4)車両Vが第1状態である、つまり駐車制御開始から所定時間以内(車両Vは停止中)であってもよいし、(5)車両Vが第2状態である、つまり駐車制御開始から所定時間経過後のタイミングであってもよいし、(6)車両Vが第1状態と第2状態の間である、つまり駐車制御開始(車両Vは停止中)から所定時間経過後の発進のタイミングであってもよい。
第1操舵命令は、車両Vが停止中である第1状態において実行される。図5Aは、駐車制御の開始から完了までのタイムチャートを示す。駐車制御が開始された後、車両Vは停止中の第1状態から発進の動作を経て移動中の第2状態へ遷移する。本実施形態における第1操舵命令は、第1状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第1操舵命令は、発進動作の前に車両Vの操舵装置50に操舵させる操舵制御を実行させる。この操舵装置50の動作は、いわゆる据え切りの動作である。
このように、車両Vが発進する所定時間前にタイヤを転舵させる第1操舵制御が実行され、車両Vが動き出すことを、事前に、車両Vの外にいる者に報知できる。また、所定時間が経過するまで、その操舵状態で待機する第2操舵制御が実行されるので、車両Vが動き出すことを車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御することはない、さらに、その後に操舵量を維持する操舵制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。
ステップ131において、制御装置10は、車両Vが第1状態であるか否かを判断する。第1状態であるか否かは、車両Vのシフトポジションがパーキングとなっていること、車両Vの速度がゼロであることに基づいて判断する。車両Vが第1状態である場合には、ステップ132に進み、第1操舵命令を実行する。次に、ステップ133において第2操舵命令を実行する。第2操舵命令において設定された待機のための所定時間が経過したことを確認したら、ステップ134において、制御装置10は車両Vを発進させる。発進後のステップ135では、車両Vは第2状態となる。なお、本態様では第1操舵命令の後に第2操舵命令を実行するが、第2操舵命令を実行することなく、ステップ132からステップ134にステップ133をスキップして進むことも可能である。
ステップ141において、制御装置10は、車両Vが第2状態であるか否かを判断する。第2状態であるか否かは、車両Vのシフトポジションがドライブとなっていること、車両Vの速度がゼロではなく、所定速度未満であることに基づいて判断する。車両Vが第2状態である場合には、ステップ142に進み、第3操舵命令を実行する。
第1操舵命令は、車両Vが停止中の第1状態及び発進後移動中である第2状態において実行される。
このように、車両Vが発進する前にタイヤを転舵させる第1操舵制御が実行され、その状態で待機する第2操舵制御が実行されるので、車両Vが動き出すことを車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御、その後に停止制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。
第3操舵命令は、車両Vが発進乃至移動中である第2状態において実行される。本実施形態における第3操舵命令は、発進乃至移動中の第2状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第3操舵命令は、発進乃至移動中に車両Vの操舵装置50に操舵させる操舵制御を実行させる。
ステップ151において、制御装置10は、車両Vが第1状態であるか否かを判断する。第1状態であるか否かは、車両Vのシフトポジションがパーキングとなっていること、車両Vの速度がゼロであることに基づいて判断する。車両Vが第1状態である場合には、ステップ152に進み、第1操舵命令を実行する。続いて、ステップ153において第2操舵命令を実行する。第2操舵命令において設定された待機のための所定時間が経過したことを確認したら、ステップ154において、制御装置10は、車両Vが第2状態であるか否かを判断する。第2状態であるか否かは、車両Vのシフトポジションがドライブとなっていること、車両Vの速度がゼロではなく、所定速度未満であることに基づいて判断する。駐車制御開始後であって、かつ第1状態ではないという判断によっても、車両Vが第2状態であるか否かを判断できる。車両Vが第2状態である場合には、ステップ155に進み、第3操舵命令を実行する。
ステップ110において、本実施形態の制御装置10は、この操舵命令の実行後に、車外の操作者Mの実行命令を受け付ける。すなわち、操舵命令が実行された後に、車両Vの外の操作者Mから取得した操作指令に基づいて車両Vの駐車処理を開始させる。車外の操作者Mは、車両Vのタイヤの動きから駐車処理の開始が可能であることを知る。この動きを確認した操作者Mは、再度車両Vの周囲を確認し、リモート操作による実行命令を入力する。他方、車外の通行人(操作者M以外)は、車両Vのタイヤの動きからその車両Vが移動を開始することを知る。操作命令が実行されることにより、操作者Mはリモートコントロールの実行タイミングを知り、他の通行者は車両Vが動き出すタイミングを知ることができる。ステップ111において、制御装置10は操作者Mのリモート操作による実行命令に従い、駐車制御を実行する。
具体的には、駐車制御開始地点VSにおいては、操舵命令における操舵方向は、切り返し地点VTに至る駐車経路の方向に沿う。操舵命令における操舵方向と、駐車制御開始地点VSから切り返し地点VTに至る方向との差は所定角度未満である。
切り返し地点VTにおいては、操舵命令における操舵方向は、切り返し地点VTから目標駐車スペースVPに至る駐車経路の方向に沿う。操舵命令における操舵方向と、切り返し地点VTから目標駐車スペースVPに至る方向との差は所定角度未満である。
操舵命令の実行後のタイヤの切れ角は、車両Vの移動方向と共通するので、車外の者はタイヤの切れ角を見て、その車両Vの進行方向を推測できる。操舵方向が共通するので、車両Vが動き出すことを車外の者に知らせるために操舵命令を実行しても、駐車経路に沿って移動する車両Vの動きを妨げることがない。加えて、図3(b)に示したように、操舵命令における操舵方向が、駐車経路RTの曲線の旋回方向に沿う場合には、操舵命令の実行により車両Vを旋回させることができるので、駐車経路RTの長さを短くできる。結果として駐車完了までの時間を短縮できる。
100…駐車制御装置
10…制御装置
11…CPU
12…ROM
13…RAM
132…記憶装置
133…地図情報
134…駐車場情報
135…障害物情報
20…入力装置
21…通信装置
30…出力装置
31…ディスプレイ
1a〜1d…カメラ
2…測距装置
3…情報サーバ
31…通信装置
32…記憶装置
33…地図情報
34…駐車場情報
35…障害物情報
5…操作端末
51…通信装置
52…入力装置
53…ディスプレイ
200…車載装置
40…駆動システム
50…操舵装置
50a…操舵角センサ
60…車速センサ
70…車両コントローラ
V…車両
Claims (9)
- 駐車経路を車両に移動させて駐車させる駐車制御方法であって、
前記車両が停止している第1状態から移動が開始された第2状態に移行する際に、前記車両の操舵装置に操舵命令を実行させる駐車制御方法。 - 前記第1状態の前記車両の前記操舵装置に第1操舵命令を実行させる請求項1に記載の駐車制御方法。
- 前記第1操舵命令を実行させた後に、所定時間経過後、前記第2状態に移行する請求項2に記載の駐車制御方法。
- 前記第1操舵命令を実行させた後に、所定時間の経過を待機させる第2操舵命令を実行させる請求項2または3に記載の駐車制御方法。
- 前記第2状態の前記車両の前記操舵装置に第3操舵命令を実行させる請求項1〜4の何れか一項に記載の駐車制御方法。
- 前記操舵命令における操舵方向は、前記駐車経路における切り返し位置又は目標駐車スペースに至る方向である請求項1〜5の何れか一項に記載の駐車制御方法。
- 前記操舵命令が指示する操舵量はステアリング角として360度以上に相当する量である請求項1〜6の何れか一項に記載の駐車制御方法。
- 前記操舵命令が実行された後に、前記車両の外の操作者から取得した操作指令に基づいて前記車両を駐車させる請求項1〜7の何れか一項に記載の駐車制御方法。
- 駐車経路を車両に移動させて駐車させる制御命令を実行させる制御装置を備える駐車制御装置であって、
前記制御装置は、
前記車両が停止している第1状態から移動が開始された第2状態に移行する際に、前記車両の操舵装置に操舵命令を実行させる駐車制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017141089A JP6911607B2 (ja) | 2017-07-20 | 2017-07-20 | 駐車制御方法及び駐車制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017141089A JP6911607B2 (ja) | 2017-07-20 | 2017-07-20 | 駐車制御方法及び駐車制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019018796A true JP2019018796A (ja) | 2019-02-07 |
| JP6911607B2 JP6911607B2 (ja) | 2021-07-28 |
Family
ID=65352642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017141089A Active JP6911607B2 (ja) | 2017-07-20 | 2017-07-20 | 駐車制御方法及び駐車制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6911607B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10264839A (ja) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | 自動駐車装置 |
| JP3107088B1 (ja) * | 1999-09-08 | 2000-11-06 | 株式会社豊田自動織機製作所 | 縦列駐車時の操舵支援装置 |
| JP2001180407A (ja) * | 1999-12-28 | 2001-07-03 | Toyota Autom Loom Works Ltd | 縦列駐車時の操舵支援装置 |
| JP2003341543A (ja) * | 2002-05-30 | 2003-12-03 | Toyoda Mach Works Ltd | 自動操舵制御装置 |
| JP2006347460A (ja) * | 2005-06-17 | 2006-12-28 | Toyota Motor Corp | 走行支援装置 |
| JP2011195092A (ja) * | 2010-03-23 | 2011-10-06 | Toyota Motor Corp | 駐車支援装置 |
-
2017
- 2017-07-20 JP JP2017141089A patent/JP6911607B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10264839A (ja) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | 自動駐車装置 |
| JP3107088B1 (ja) * | 1999-09-08 | 2000-11-06 | 株式会社豊田自動織機製作所 | 縦列駐車時の操舵支援装置 |
| JP2001180407A (ja) * | 1999-12-28 | 2001-07-03 | Toyota Autom Loom Works Ltd | 縦列駐車時の操舵支援装置 |
| JP2003341543A (ja) * | 2002-05-30 | 2003-12-03 | Toyoda Mach Works Ltd | 自動操舵制御装置 |
| JP2006347460A (ja) * | 2005-06-17 | 2006-12-28 | Toyota Motor Corp | 走行支援装置 |
| JP2011195092A (ja) * | 2010-03-23 | 2011-10-06 | Toyota Motor Corp | 駐車支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6911607B2 (ja) | 2021-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6517561B2 (ja) | 車両制御装置 | |
| JP6493551B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| US11305756B2 (en) | Parking control method and parking control apparatus | |
| JP6801787B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP6760499B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| CN110621550B (zh) | 泊车控制方法以及泊车控制装置 | |
| US11634118B2 (en) | Parking control method and parking control apparatus | |
| JP6856126B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP4946631B2 (ja) | 発進支援装置、表示装置 | |
| CN108140319A (zh) | 停车辅助方法及停车辅助装置 | |
| US20210086759A1 (en) | Parking Control Method and Parking Control Apparatus | |
| JP2015516772A (ja) | 携帯型通信装置を使用した自動車の遠隔制御操縦 | |
| CN111183066A (zh) | 停车控制方法及停车控制装置 | |
| JP6328217B1 (ja) | 自動駐車装置 | |
| JP7081148B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP6852564B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP7020113B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP6996228B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP6911607B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| JP7081149B2 (ja) | 駐車制御方法及び駐車制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210621 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6911607 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |