JP2019042936A - 記録装置 - Google Patents
記録装置 Download PDFInfo
- Publication number
- JP2019042936A JP2019042936A JP2017165175A JP2017165175A JP2019042936A JP 2019042936 A JP2019042936 A JP 2019042936A JP 2017165175 A JP2017165175 A JP 2017165175A JP 2017165175 A JP2017165175 A JP 2017165175A JP 2019042936 A JP2019042936 A JP 2019042936A
- Authority
- JP
- Japan
- Prior art keywords
- medium
- sheet
- unit
- conveyance
- roller pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 37
- 238000001179 sorption measurement Methods 0.000 claims abstract description 25
- 238000011144 upstream manufacturing Methods 0.000 claims abstract description 20
- 238000001514 detection method Methods 0.000 claims description 10
- 239000007788 liquid Substances 0.000 claims description 4
- 230000032258 transport Effects 0.000 abstract description 154
- 238000010586 diagram Methods 0.000 description 9
- 230000007423 decrease Effects 0.000 description 6
- 101000794020 Homo sapiens Bromodomain-containing protein 8 Proteins 0.000 description 4
- 101001006782 Homo sapiens Kinesin-associated protein 3 Proteins 0.000 description 4
- 101000615355 Homo sapiens Small acidic protein Proteins 0.000 description 4
- WGKGADVPRVLHHZ-ZHRMCQFGSA-N N-[(1R,2R,3S)-2-hydroxy-3-phenoxazin-10-ylcyclohexyl]-4-(trifluoromethoxy)benzenesulfonamide Chemical compound O[C@H]1[C@@H](CCC[C@@H]1N1C2=CC=CC=C2OC2=C1C=CC=C2)NS(=O)(=O)C1=CC=C(OC(F)(F)F)C=C1 WGKGADVPRVLHHZ-ZHRMCQFGSA-N 0.000 description 4
- 102100021255 Small acidic protein Human genes 0.000 description 4
- 238000000926 separation method Methods 0.000 description 3
- 239000006061 abrasive grain Substances 0.000 description 2
- 230000000274 adsorptive effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images






Landscapes
- Ink Jet (AREA)
Abstract
【課題】媒体支持部に媒体を吸着するための吸着機構を備える記録装置において、前記吸着機構による吸着力の影響を補正し、前記媒体をより適切に搬送する。
【解決手段】プリンターは、記録ヘッド10に対向して配置され、用紙を支持する支持面15を備える媒体支持部14と、記録ヘッドによる記録領域に対して上流側に設けられる搬送ローラー対11と、下流側に設けられる排出ローラー対12と、支持面に用紙を吸着する吸着力を発生させる吸着機構20とを備え、搬送ローラー対及び排出ローラー対の駆動を制御する制御部は、用紙が搬送ローラー対及び排出ローラー対のいずれか一方によって搬送される場合に、前記媒体搬送方向における用紙の端部の位置に応じて決まる補正値に基づいて、用紙を搬送する搬送ローラー対及び排出ローラー対のいずれか一方の駆動量を補正する補正制御を実行する。
【選択図】図5
【解決手段】プリンターは、記録ヘッド10に対向して配置され、用紙を支持する支持面15を備える媒体支持部14と、記録ヘッドによる記録領域に対して上流側に設けられる搬送ローラー対11と、下流側に設けられる排出ローラー対12と、支持面に用紙を吸着する吸着力を発生させる吸着機構20とを備え、搬送ローラー対及び排出ローラー対の駆動を制御する制御部は、用紙が搬送ローラー対及び排出ローラー対のいずれか一方によって搬送される場合に、前記媒体搬送方向における用紙の端部の位置に応じて決まる補正値に基づいて、用紙を搬送する搬送ローラー対及び排出ローラー対のいずれか一方の駆動量を補正する補正制御を実行する。
【選択図】図5
Description
本発明は、搬送される媒体に記録を行う記録装置に関する。
記録ヘッドから液体としてのインクを媒体に噴射して記録を行う記録装置としてのインクジェットプリンター(以下、単にプリンターと言う場合がある)において、前記記録部と対向する位置に設けられる媒体支持部の支持面に、前記媒体を吸着する吸着機構を備えて構成されるものがある。
例えば、特許文献1には、前記媒体支持部としてのプラテンに、前記吸着機構として、負圧により前記媒体を吸引して吸着する吸着力発生手段が設けられたインクジェットプリンターが開示されている。
例えば、特許文献1には、前記媒体支持部としてのプラテンに、前記吸着機構として、負圧により前記媒体を吸引して吸着する吸着力発生手段が設けられたインクジェットプリンターが開示されている。
ところで、特許文献1のように、前記吸着力発生手段の吸引力により、プラテンに前記媒体を吸着しつつ搬送する構成では、前記吸引力による経路負荷がかかるので、媒体を搬送する搬送手段と前記媒体との間でスリップが発生し、前記搬送手段による前記媒体の搬送量が減少する場合がある。
このため、特許文献1においては、前記吸着力発生手段が発生する吸引力に応じて前記搬送手段の駆動量を補正することで、前記搬送手段による前記媒体の搬送量を安定させている。
例えば、前記媒体が前記プラテンの上流側の搬送手段(搬送ローラ1とピンチローラ2)と下流側の搬送手段(排出ローラ12と拍車13)の双方に同時に挟持されていないと、前記媒体の端部がプラテンから浮き上がり易い。よって、前記媒体が前記プラテンの上流側の搬送手段と下流側の搬送手段のいずれか一方により搬送されている場合の前記吸引力は、前記上流側の搬送手段及び前記下流側の搬送手段の双方に同時に挟持されている場合の前記吸引力よりも強く設定される。
このとき、前記吸引力の違いに応じて、前記上流側或いは前記下流側の前記搬送手段の駆動量の補正が行われている。
例えば、前記媒体が前記プラテンの上流側の搬送手段(搬送ローラ1とピンチローラ2)と下流側の搬送手段(排出ローラ12と拍車13)の双方に同時に挟持されていないと、前記媒体の端部がプラテンから浮き上がり易い。よって、前記媒体が前記プラテンの上流側の搬送手段と下流側の搬送手段のいずれか一方により搬送されている場合の前記吸引力は、前記上流側の搬送手段及び前記下流側の搬送手段の双方に同時に挟持されている場合の前記吸引力よりも強く設定される。
このとき、前記吸引力の違いに応じて、前記上流側或いは前記下流側の前記搬送手段の駆動量の補正が行われている。
ここで、特許文献1では、例えば前記媒体が前記プラテンの下流側の搬送手段(排出ローラ12と拍車13)のみによって搬送されている場合、すなわち、排紙動作中において、前記吸着力発生手段の吸引力が所定の値に設定される(特許文献1の段落0068の表3を参照)。
しかし、前記排紙動作中、前記吸着力発生手段の吸引力が一定に設定されていても、前記吸着力発生手段が設けられた前記プラテンに対する前記媒体の後端部の位置に応じて、前記媒体にかかる実際の吸引力が変化することが考えられる。例えば、搬送方向に沿って前記プラテンに複数の吸引口が設けられている構成では、前記媒体の搬送が進むにつれて前記媒体を吸引する吸引口の数も変化する為、これにより前記媒体にかかる実際の吸引力が変化する。
前記媒体にかかる実際の吸引力が変化すると、前記吸着力発生手段の設定された前記吸引力に基づいて前記下流側の搬送手段の駆動量を補正しても、前記搬送量が適切に補正できない虞がある。
しかし、前記排紙動作中、前記吸着力発生手段の吸引力が一定に設定されていても、前記吸着力発生手段が設けられた前記プラテンに対する前記媒体の後端部の位置に応じて、前記媒体にかかる実際の吸引力が変化することが考えられる。例えば、搬送方向に沿って前記プラテンに複数の吸引口が設けられている構成では、前記媒体の搬送が進むにつれて前記媒体を吸引する吸引口の数も変化する為、これにより前記媒体にかかる実際の吸引力が変化する。
前記媒体にかかる実際の吸引力が変化すると、前記吸着力発生手段の設定された前記吸引力に基づいて前記下流側の搬送手段の駆動量を補正しても、前記搬送量が適切に補正できない虞がある。
そこで、本発明は、記録ヘッドと対向する位置に設けられる媒体支持部に、前記媒体を吸着するための吸着機構を備える記録装置において、前記吸着機構による吸着力の影響を媒体の位置に応じて補正し、前記媒体をより適切に搬送することにある。
上記課題を解決する為の、本発明の第1の態様に係る記録装置は、搬送される媒体に液体を噴射して記録を行う記録ヘッドと、前記記録ヘッドに対向して配置され、前記媒体を支持する支持面を備える媒体支持部と、前記記録ヘッドによる記録領域に対して媒体搬送方向上流側に設けられる第1搬送部と、前記記録ヘッドによる記録領域に対して媒体搬送方向下流側に設けられる第2搬送部と、前記媒体支持部の前記支持面に前記媒体を吸着する吸着力を発生させる吸着機構と、前記第1搬送部及び前記第2搬送部の駆動を制御する制御部と、を備え、前記制御部は、前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、前記媒体搬送方向における前記媒体の端部の位置に応じて決まる補正値に基づいて、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を補正する補正制御を実行する、ことを特徴とする。
前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、吸着力が発生した前記支持面に対する前記媒体の前記媒体搬送方向における位置が変わると、前記吸着機構における吸着力発生動作を一定にしていても、前記媒体にかかる前記吸着力が変化することが考えられる。前記媒体を搬送する搬送部の駆動量が一定のまま前記媒体にかかる前記吸着力が変化すると、前記媒体の搬送量も変化する虞がある。
本態様によれば、前記制御部は、前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、前記媒体搬送方向における前記媒体の端部の位置に応じて決まる補正値に基づいて、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を補正する補正制御を実行するので、前記媒体の端部位置に応じて前記媒体にかかる前記吸着機構の吸着力が変化した場合に、前記媒体の搬送量を適切に補正することができる。
本発明の第2の態様は、第1の態様において、前記制御部は、前記補正制御において、前記媒体搬送方向における前記媒体の端部の位置の情報から、前記媒体搬送方向において前記媒体が前記吸着機構が設けられている領域と重なる部分の長さを得て、前記長さに応じて前記補正値を決定する、ことを特徴とする。
本態様によれば、前記制御部が、前記補正制御において、前記媒体搬送方向における前記媒体の端部の位置の情報から、前記媒体搬送方向において前記媒体が前記吸着機構が設けられている領域と重なる部分の長さを得て、前記長さに応じて前記補正値を決定することにより、第1の態様の構成を実現できる。
本発明の第3の態様は、第1の態様または第2の態様において、前記制御部は、前記補正制御において、前記媒体搬送方向における、前記第1搬送部と前記第2搬送部との間にある前記媒体の一方側端部の位置に応じて前記補正値を決定する、ことを特徴とする。
本態様によれば、前記制御部は、前記媒体搬送方向において、前記第1搬送部と前記第2搬送部との間にある前記媒体の端部の位置に応じて前記補正値を決定するので、より適切に前記媒体の搬送量を補正することができる。
本発明の第4の態様は、第3の態様において、前記制御部は、前記補正制御において、前記一方側端部の位置が、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部から離れているほど、前記搬送部の駆動量を増やす、ことを特徴とする。
前記第1搬送部と前記第2搬送部との間にある前記媒体の前記一方側端部の位置が、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部から離れていると、前記媒体が前記吸着機構が設けられている領域と重なる領域が増える。このことにより、前記媒体における前記吸着力による経路負荷が増えるので、前記一方側端部の位置が前記搬送部から離れているほど、前記搬送部による搬送量の減少量は増える。
本態様によれば、前記制御部は、前記補正制御において、前記一方側端部の位置が、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部から離れているほど、前記搬送部の駆動量を増やすので、前記媒体の搬送量の適切な補正を実現できる。
本態様によれば、前記制御部は、前記補正制御において、前記一方側端部の位置が、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部から離れているほど、前記搬送部の駆動量を増やすので、前記媒体の搬送量の適切な補正を実現できる。
本発明の第5の態様は、第1の態様から第4の態様のいずれか一つにおいて、前記媒体の通過を検出する検出部を備え、前記制御部は、前記検出部から送信される検出信号に基づいて前記媒体の前記端部の位置を把握する、ことを特徴とする。
本態様によれば、前記制御部が、前記検出部から送信される検出信号に基づいて前記媒体の前記端部の位置を把握するので、精度の高い前記補正制御を実行することができる。
本発明の第6の態様は、第1の態様から第5の態様のいずれか一つにおいて、前記第1搬送部が前記媒体に付与する送り力は、前記第2搬送部が前記媒体に付与する送り力より大きく、前記補正制御における、前記媒体が前記第1搬送部によって搬送される場合における前記第1搬送部の駆動量の補正値は、前記媒体が前記第2搬送部によって搬送される場合における前記第2搬送部の駆動量の補正値よりも小さい、ことを特徴とする。
前記第1搬送部が前記媒体に付与する送り力が、前記第2搬送部が前記媒体に付与する送り力より大きい構成において、前記媒体が前記第1搬送部によって搬送される場合における前記第1搬送部の駆動量の補正値を、前記媒体が前記第2搬送部によって搬送される場合における前記第2搬送部の駆動量の補正値よりも小さくするので、前記媒体が前記第1搬送部及び前記第2搬送部のいずれかで搬送されるかに応じて、前記媒体の搬送量の適切な補正を実現できる。
本発明の第7の態様は、第1の態様から第6の態様のいずれか一つにおいて、前記吸着機構は、前記媒体支持部の前記支持面に、前記媒体搬送方向に沿って複数設けられる吸引孔と、前記複数の吸引孔に、前記支持面に前記媒体を吸着するための吸引力を発生させる吸引部と、を備えて構成される、ことを特徴とする。
本態様によれば、前記媒体支持部の前記支持面に、前記媒体搬送方向に沿って複数設けられる吸引孔と、前記複数の吸引孔に、前記支持面に前記媒体を吸着するための吸引力を発生させる吸引部と、を備えて構成される前記吸着機構を有する記録装置において、第1の態様から第6の態様のいずれか一つと同様の作用効果が得られる。
本発明の第8の態様は、第7の態様において、前記制御部は、前記補正制御において、前記媒体によって塞がれる前記吸引孔の数が多いほど、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を増やす、ことを特徴とする。
前記媒体によって塞がれる前記吸引孔の数が多いと、前記媒体における前記吸着力(吸引力)による経路負荷が増えるので、前記経路負荷に起因する、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部による搬送量の減少量が多くなる。
本態様によれば、前記制御部は、前記補正制御において、前記媒体によって塞がれる前記吸引孔の数が多いほど、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を増やすので、前記媒体の搬送量の適切な補正を実現できる。
本態様によれば、前記制御部は、前記補正制御において、前記媒体によって塞がれる前記吸引孔の数が多いほど、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を増やすので、前記媒体の搬送量の適切な補正を実現できる。
本発明の第9の態様は、第1の態様から第8の態様のいずれか一つにおいて、前記制御部は、前記補正制御において、前記媒体の種類に応じて前記補正値を変える、ことを特徴とする。
前記媒体の種類としては、例えば、記録面やその裏面の表面状態が異なる媒体、厚みや剛性の異なる媒体、サイズの異なる媒体等が挙げられる。
本態様によれば、前記制御部は、前記補正制御において、前記媒体の種類に応じて前記補正値を変えるので、種類の違う媒体を適切な搬送量で搬送することができる。
本態様によれば、前記制御部は、前記補正制御において、前記媒体の種類に応じて前記補正値を変えるので、種類の違う媒体を適切な搬送量で搬送することができる。
本発明の第10の態様は、第1の態様から第9の態様のいずれか一つにおいて、前記補正制御を第1の補正制御とし、前記制御部は、前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、前記第1の補正制御と、前記媒体搬送方向における前記媒体の端部の位置に係わらず、前記第1搬送部及び前記第2搬送部のいずれにより前記媒体が搬送されるかによってのみ決まる補正値に基づいて、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を補正する第2補正制御と、のいずれかを選択可能である、ことを特徴とする。
前記媒体の種類によっては、当該媒体が搬送されることにより端部の位置が移動して前記吸着力が変化しても、その搬送量に影響が出にくい場合がある(例えば、前記媒体が厚紙の場合)。このような媒体に対しては、前記媒体搬送方向における前記媒体の端部の位置に係わらず、前記第1搬送部及び前記第2搬送部のいずれにより前記媒体が搬送されるかによってのみ決まる補正値に基づいて、前記媒体を搬送するいずれか一方の搬送部の駆動量を補正する第2補正制御を実行することができる。
本態様によれば、前記媒体に応じて前記第1の補正制御か前記第2補正制御かを選択し、当該媒体の適切な搬送を実現できる
本態様によれば、前記媒体に応じて前記第1の補正制御か前記第2補正制御かを選択し、当該媒体の適切な搬送を実現できる
[第1実施形態]
まず、本発明の一実施形態に係る記録装置の概略について説明する。記録装置の一例として、インクジェットプリンター1(以下、単にプリンター1という)を例に挙げる。
図1は、本発明に係るプリンターの概略構成図である。図2は、図1の要部拡大図である。図3は、媒体支持部の平面図である。図4は、第2の補正制御について説明する図である。図5は、第1状態における第1の補正制御について説明する図である。図6は、第3状態における第1の補正制御について説明する図である。
まず、本発明の一実施形態に係る記録装置の概略について説明する。記録装置の一例として、インクジェットプリンター1(以下、単にプリンター1という)を例に挙げる。
図1は、本発明に係るプリンターの概略構成図である。図2は、図1の要部拡大図である。図3は、媒体支持部の平面図である。図4は、第2の補正制御について説明する図である。図5は、第1状態における第1の補正制御について説明する図である。図6は、第3状態における第1の補正制御について説明する図である。
尚、各図において示すX−Y−Z座標系は、X方向が記録ヘッドの走査方向であり、記録が行われる媒体の幅方向である。Y方向が装置奥行き方向であり、媒体の長さ方向である。Z方向は重力方向であり、装置高さ方向である。また、+Y方向側を装置前面側とし、−Y方向側を装置背面側とする。また、装置前面側から見て左側を+X方向、右側を−X方向とする。装置前面を左側に向けて装置側面側から見た図である図1においては、紙面を正面視して奥側が+X方向、手前側が−X方向である。また、+Z方向を装置上方(上部、上面等を含む)とし、−Z方向側を装置下方(下部、下面等を含む)とする。
また本明細書において、プリンター1において用紙が搬送されていく搬送方向を「下流」といい、これと反対の方向を「上流」という。
また本明細書において、プリンター1において用紙が搬送されていく搬送方向を「下流」といい、これと反対の方向を「上流」という。
■■■プリンターの概要とプリンターにおける用紙搬送経路■■■
以下、図1及び図2を参照して、プリンター1の概要とプリンター1における用紙搬送経路について説明する。
プリンター1(図1)は、装置外観を構成する筐体2を備えて構成され、筐体2の内部に「媒体」としての用紙に記録を行う記録ヘッド10を含む各種構成部を備えている。
プリンター1において記録が行われる用紙としては、一例として普通紙や厚紙、写真用紙等が挙げられる。
プリンター1は、記録機能だけでなく、例えば、原稿の読み取り機能、すなわち、スキャナー部(図示省略)を備える複合機として構成することもできる。前記スキャナー部は、一例として、筐体2の上部に設けることができる。
以下、図1及び図2を参照して、プリンター1の概要とプリンター1における用紙搬送経路について説明する。
プリンター1(図1)は、装置外観を構成する筐体2を備えて構成され、筐体2の内部に「媒体」としての用紙に記録を行う記録ヘッド10を含む各種構成部を備えている。
プリンター1において記録が行われる用紙としては、一例として普通紙や厚紙、写真用紙等が挙げられる。
プリンター1は、記録機能だけでなく、例えば、原稿の読み取り機能、すなわち、スキャナー部(図示省略)を備える複合機として構成することもできる。前記スキャナー部は、一例として、筐体2の上部に設けることができる。
続いて、図1を参照して、プリンター1における用紙搬送経路について説明する。尚、図1において、破線Sが後述する用紙トレイ3をからの用紙搬送経路を示している。
プリンター1は、底部に複数の用紙Pを収容する用紙トレイ3を備え、用紙トレイ3から用紙Pが1枚ずつ給送される。
プリンター1は、底部に複数の用紙Pを収容する用紙トレイ3を備え、用紙トレイ3から用紙Pが1枚ずつ給送される。
用紙Pは、用紙トレイ3から給送ローラー4(ピックアップローラーとも言う)により一旦装置背面側(−Y方向)に送られる。給送ローラー4によって複数枚の用紙がピックアップされた場合には分離ローラー対5によって一枚に分離され、第1中間ローラー6に向けて搬送される。用紙は第1中間ローラー6によって湾曲されて装置前面側(+Y方向)に送られ、更に第2中間ローラー7によって、後述する搬送ローラー対11に向けて送られる。
尚、図1において符号8a、8bは、第1中間ローラー6の回転に従動回転する従動ローラーである。符号9a、9bは、第2中間ローラー7の回転に従動回転する従動ローラーである。
尚、図1において符号8a、8bは、第1中間ローラー6の回転に従動回転する従動ローラーである。符号9a、9bは、第2中間ローラー7の回転に従動回転する従動ローラーである。
第2中間ローラー7の下流側には「第1搬送部」としての搬送ローラー対11が設けられている。言い換えると、搬送ローラー対11は、記録ヘッド10による記録領域Kに対して媒体搬送方向上流側に設けられている。
搬送ローラー対11は、図2に示すように搬送駆動ローラー11aと搬送従動ローラー11bとを備えて構成され、搬送駆動ローラー11aが駆動源19(図1)によって駆動されている。駆動源19の動作は後述する制御部18(図1)によって制御されている。用紙Pは搬送ローラー対11によって挟持(ニップ)されて搬送され、記録ヘッド10の下へと送られる。
尚、搬送ローラー対11は、正転及び逆転の双方に回転可能に構成されている。
搬送ローラー対11は、図2に示すように搬送駆動ローラー11aと搬送従動ローラー11bとを備えて構成され、搬送駆動ローラー11aが駆動源19(図1)によって駆動されている。駆動源19の動作は後述する制御部18(図1)によって制御されている。用紙Pは搬送ローラー対11によって挟持(ニップ)されて搬送され、記録ヘッド10の下へと送られる。
尚、搬送ローラー対11は、正転及び逆転の双方に回転可能に構成されている。
図1に示すように、記録ヘッド10は、媒体搬送方向(Y軸方向)と交差する幅方向(X軸方向)に移動可能に構成されるキャリッジ13に保持されており、記録ヘッド10による記録領域Kに搬送される用紙に対して「液体」としてのインクを噴射することにより記録が行われるように構成されている。記録ヘッド10へのインクの供給は、例えばキャリッジ13に搭載されるインクカートリッジ(図示省略)から行う場合の他、筐体2の内部または外部に設けられるインクタンク(図示省略)からチューブを介して行うことができる。
記録ヘッド10の下方、すなわち記録ヘッド10に対向する位置には、用紙Pを支持する支持面15を備える媒体支持部14が設けられている。更に、媒体支持部14の支持面15に用紙Pを吸着する吸着力を発生させる吸着機構20が設けられている。
本実施形態の吸着機構20は、媒体支持部14の支持面15に、媒体搬送方向に沿って複数設けられる吸引孔16と、複数の吸引孔16に、支持面15に用紙Pを吸着するための吸引力を発生させる吸引部21と、を備えて構成される。
本実施形態の吸着機構20は、媒体支持部14の支持面15に、媒体搬送方向に沿って複数設けられる吸引孔16と、複数の吸引孔16に、支持面15に用紙Pを吸着するための吸引力を発生させる吸引部21と、を備えて構成される。
複数の吸引孔16は吸引部21に連通しており(図2も参照)、吸引部21を動作させることにより複数の吸引孔16に吸引力を発生させるように構成されている。複数の吸引孔16から吸引されることにより、用紙Pは媒体支持部14の支持面15に吸着され、支持面15上において安定した姿勢をとることができる。吸着機構20の具体的な構成と動作については、後で詳しく説明する。
尚、吸着機構20としては、吸引孔16から吸引部21によって吸引して吸着する構成に限られず、例えば、帯電させた支持面15に用紙を静電吸着する構成を用いることができる。
尚、吸着機構20としては、吸引孔16から吸引部21によって吸引して吸着する構成に限られず、例えば、帯電させた支持面15に用紙を静電吸着する構成を用いることができる。
記録ヘッド10の下流側(+Y方向)には、「第2搬送部」としての排出ローラー対12が設けられている。言い換えると、排出ローラー対12は、記録ヘッド10による記録領域Kに対して媒体搬送方向下流側に設けられている。
本実施形態において排出ローラー対12は、図2に示す排出駆動ローラー12aと排出従動ローラー12bを備えて構成され、排出駆動ローラー12aが、搬送駆動ローラー11aと共通の駆動源19によって駆動されている。
尚、駆動源19は、給送ローラー4、分離ローラー対5、第1中間ローラー6、及び第2中間ローラー7のいずれか、或いは全部を駆動するように構成することができる。勿論、これらを駆動する他の駆動源を設けることも可能である。
本実施形態において排出ローラー対12は、図2に示す排出駆動ローラー12aと排出従動ローラー12bを備えて構成され、排出駆動ローラー12aが、搬送駆動ローラー11aと共通の駆動源19によって駆動されている。
尚、駆動源19は、給送ローラー4、分離ローラー対5、第1中間ローラー6、及び第2中間ローラー7のいずれか、或いは全部を駆動するように構成することができる。勿論、これらを駆動する他の駆動源を設けることも可能である。
記録ヘッド10による記録後の用紙Pは、排出ローラー対12に挟持(ニップ)されて、装置前面側に設けられる排紙トレイ17に排出される。
排出ローラー対12も搬送ローラー対11と同様に、正転及び逆転の双方に回転可能に構成されている。
プリンター1は、用紙Pの第1面への記録後に前記第1面に対し反対側の第2面に記録を行う両面記録が可能に構成されている。両面記録を行う場合、用紙Pの第1面への記録後に、搬送ローラー対11及び排出ローラー対12を逆転させて用紙Pを反転する。
排出ローラー対12も搬送ローラー対11と同様に、正転及び逆転の双方に回転可能に構成されている。
プリンター1は、用紙Pの第1面への記録後に前記第1面に対し反対側の第2面に記録を行う両面記録が可能に構成されている。両面記録を行う場合、用紙Pの第1面への記録後に、搬送ローラー対11及び排出ローラー対12を逆転させて用紙Pを反転する。
逆転する搬送ローラー対11及び排出ローラー対12によりバックフィードされた用紙Pは、スイッチバック経路R(図1において一点鎖線で示す)に送られる。スイッチバック経路Rは、第2中間ローラー7と第1中間ローラー6の下方を通って、従動ローラー8aの手前で用紙搬送経路Sに合流しており、用紙Pは再度第1中間ローラー6によって反転されつつ、用紙搬送経路Sを搬送されるように構成されている。
用紙Pが反転されると、用紙Pは第2面(裏面)が上に向いた状態で記録ヘッド10の下方に送られて、前記第2面への記録が行われる。
用紙Pが反転されると、用紙Pは第2面(裏面)が上に向いた状態で記録ヘッド10の下方に送られて、前記第2面への記録が行われる。
本実施形態において、搬送ローラー対11及び排出ローラー対12は、用紙Pを媒体支持部14の支持面15に押し付けつつ搬送する構成である。
より具体的には、図2に示すように、搬送ローラー対11において、搬送駆動ローラー11aの回転軸23a、及び搬送従動ローラー11bの回転軸23bの軸線方向、すなわち、X軸方向から見て、搬送ローラー対11のニップ点N1における接線E1は、媒体支持部14の支持面15と交差する。また、排出ローラー対12において、排出駆動ローラー12aの回転軸24a、及び排出従動ローラー12bの回転軸24bの軸線方向、すなわち、X軸方向から見て、排出ローラー対12のニップ点N2における接線E2は、媒体支持部14の支持面15と交差する。
より具体的には、図2に示すように、搬送ローラー対11において、搬送駆動ローラー11aの回転軸23a、及び搬送従動ローラー11bの回転軸23bの軸線方向、すなわち、X軸方向から見て、搬送ローラー対11のニップ点N1における接線E1は、媒体支持部14の支持面15と交差する。また、排出ローラー対12において、排出駆動ローラー12aの回転軸24a、及び排出従動ローラー12bの回転軸24bの軸線方向、すなわち、X軸方向から見て、排出ローラー対12のニップ点N2における接線E2は、媒体支持部14の支持面15と交差する。
この構成により、搬送ローラー対11のニップ点N1と排出ローラー対12のニップ点N2との間で、用紙Pが媒体支持部14の支持面15に押し付けられる(図2)。以って、支持面15上で用紙Pが浮き上がることを抑制し、用紙Pが記録ヘッドに接触する虞を低減できる。
特に、記録後の用紙Pは、記録面が外側、非記録面側が内側となるようにカールする場合がある。搬送ローラー対11及び排出ローラー対12が、用紙Pを媒体支持部14の支持面15に押し付けつつ搬送する構成であることにより、用紙Pに前記カールを矯正するような癖付け(デカール)を行うことができる。
特に、記録後の用紙Pは、記録面が外側、非記録面側が内側となるようにカールする場合がある。搬送ローラー対11及び排出ローラー対12が、用紙Pを媒体支持部14の支持面15に押し付けつつ搬送する構成であることにより、用紙Pに前記カールを矯正するような癖付け(デカール)を行うことができる。
また、搬送経路には、搬送される用紙Pの通過を検出する「検出部」として、第1センサー25が設けられている。第1センサー25は、搬送ローラー対11の上流側に設けられている。
更に、記録ヘッド10のすぐ上流側には、第2センサー26が設けられている。キャリッジ13に一体に設けられる第2センサー26は、用紙Pの用紙搬送方向(Y軸方向)の端部位置に加え、キャリッジ13を用紙Pの幅方向(X軸方向)に移動させることで用紙Pの幅方向(X軸方向)の端部位置を検出可能になっている。第1センサー25及び第2センサー26には、光学式センサーや超音波式センサー等の公知の媒体検出センサーを用いることができる。
更に、記録ヘッド10のすぐ上流側には、第2センサー26が設けられている。キャリッジ13に一体に設けられる第2センサー26は、用紙Pの用紙搬送方向(Y軸方向)の端部位置に加え、キャリッジ13を用紙Pの幅方向(X軸方向)に移動させることで用紙Pの幅方向(X軸方向)の端部位置を検出可能になっている。第1センサー25及び第2センサー26には、光学式センサーや超音波式センサー等の公知の媒体検出センサーを用いることができる。
プリンター1において、記録に係わる動作は制御部18によって制御されている。制御部18は、用紙の搬送に係わる動作、すなわち搬送ローラー対11及び排出ローラー対12等の各種ローラーの駆動や、吸引部21の吸引動作、記録ヘッド10によるインクの噴射、キャリッジ13の移動等を制御する。
制御部18は、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される場合に、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の搬送部の駆動量を補正する補正制御(後述する第1の補正制御と第2の補正制御)を実行する。この「補正制御」を行う点が、本発明の特徴部分である。
「補正制御」については、以下において吸着機構20の構成について説明した後に説明する。
制御部18は、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される場合に、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の搬送部の駆動量を補正する補正制御(後述する第1の補正制御と第2の補正制御)を実行する。この「補正制御」を行う点が、本発明の特徴部分である。
「補正制御」については、以下において吸着機構20の構成について説明した後に説明する。
■■■吸着機構■■■
以下、図2及び図3を参照して吸着機構20について説明する。前述したように、吸着機構20は、媒体支持部14の支持面15に媒体搬送方向に沿って設けられた複数の吸引孔16と、支持面15に用紙Pを吸着するための吸引力を発生させる吸引部21とを備えて構成されている。
以下、図2及び図3を参照して吸着機構20について説明する。前述したように、吸着機構20は、媒体支持部14の支持面15に媒体搬送方向に沿って設けられた複数の吸引孔16と、支持面15に用紙Pを吸着するための吸引力を発生させる吸引部21とを備えて構成されている。
<<<吸引孔について>>>
前述したように媒体支持部14は、支持面15に媒体搬送方向に沿って設けられる複数の吸引孔16を備えている。本実施形態において、複数の吸引孔16は、図3に示すように、媒体搬送方向(Y方向)と媒体幅方向(X方向)に間隔を空けて支持面15に設けられている。吸引孔16は、媒体支持部14の下方に設けられる吸引部21(図2)に連通している。
尚、図3において複数の吸引孔16は、媒体搬送方向(Y方向)と媒体幅方向(X方向)のそれぞれにおいて等間隔に設けられているが、例えば、媒体幅方向(X方向)における位置を、用紙の規格(A4サイズ、B5サイズ等)に対応するように間隔をずらして配してもよい。
前述したように媒体支持部14は、支持面15に媒体搬送方向に沿って設けられる複数の吸引孔16を備えている。本実施形態において、複数の吸引孔16は、図3に示すように、媒体搬送方向(Y方向)と媒体幅方向(X方向)に間隔を空けて支持面15に設けられている。吸引孔16は、媒体支持部14の下方に設けられる吸引部21(図2)に連通している。
尚、図3において複数の吸引孔16は、媒体搬送方向(Y方向)と媒体幅方向(X方向)のそれぞれにおいて等間隔に設けられているが、例えば、媒体幅方向(X方向)における位置を、用紙の規格(A4サイズ、B5サイズ等)に対応するように間隔をずらして配してもよい。
吸引部21は、本実施形態においては回転羽根21aを有する吸引ファンであり、回転羽根21aが回転することにより、図2における矢印A方向に向けて風が発生する構成である。
そして、吸引部21を動作させると、複数の吸引孔16に用紙Pを支持面15に吸着させる吸引力が発生する。用紙Pは、媒体支持部14の支持面15に吸着されることにより、支持面15上において浮き上がることが抑制され、安定した姿勢をとることができる。
そして、吸引部21を動作させると、複数の吸引孔16に用紙Pを支持面15に吸着させる吸引力が発生する。用紙Pは、媒体支持部14の支持面15に吸着されることにより、支持面15上において浮き上がることが抑制され、安定した姿勢をとることができる。
吸引部21はモーター等の駆動源22(図1)により駆動され、駆動源22を制御部18が制御することにより、吸引部21による吸引力を調整可能に構成されている。
吸引部21による吸引力の強弱は、本実施形態のように吸引部21が吸引ファンである場合には、回転羽根21aの回転数を上げることにより吸引力を強め、回転羽根21aの回転数を下げることにより吸引力を弱めることができる。
吸引部21としては吸引ファンの他、例えば、吸引ポンプを用いることができる。吸引部21が吸引ポンプである場合には、吸引ポンプの出力を上げることにより吸引力を強め、吸引ポンプの出力を下げることにより吸引力を弱めることができる。
吸引部21による吸引力の強弱は、本実施形態のように吸引部21が吸引ファンである場合には、回転羽根21aの回転数を上げることにより吸引力を強め、回転羽根21aの回転数を下げることにより吸引力を弱めることができる。
吸引部21としては吸引ファンの他、例えば、吸引ポンプを用いることができる。吸引部21が吸引ポンプである場合には、吸引ポンプの出力を上げることにより吸引力を強め、吸引ポンプの出力を下げることにより吸引力を弱めることができる。
■■■制御部による制御■■■
以下において、制御部18が行う制御について説明する。まず、制御部18による吸引部21の吸引力制御について説明し、その後、前述した「補正制御」について説明する。
◆吸引部の制御について◆
媒体支持部14上に用紙Pの一部がある場合、用紙Pの支持状態には、用紙Pが搬送ローラー対11のみによって挟持されている第1状態(図4の上図)と、用紙Pが搬送ローラー対11及び排出ローラー対12の双方によって挟持されている第2状態(図4の中図)と、用紙Pが排出ローラー対12のみによって挟持されている第3状態(図4の下図)と、がある。尚、以下において、前記第2状態を両ニップといい、前記第1状態及び前記第3状態を片ニップと言う場合がある。
制御部18は、用紙Pの前記支持状態に応じて吸引部21の吸引力を変える制御を行うことができる。
以下において、制御部18が行う制御について説明する。まず、制御部18による吸引部21の吸引力制御について説明し、その後、前述した「補正制御」について説明する。
◆吸引部の制御について◆
媒体支持部14上に用紙Pの一部がある場合、用紙Pの支持状態には、用紙Pが搬送ローラー対11のみによって挟持されている第1状態(図4の上図)と、用紙Pが搬送ローラー対11及び排出ローラー対12の双方によって挟持されている第2状態(図4の中図)と、用紙Pが排出ローラー対12のみによって挟持されている第3状態(図4の下図)と、がある。尚、以下において、前記第2状態を両ニップといい、前記第1状態及び前記第3状態を片ニップと言う場合がある。
制御部18は、用紙Pの前記支持状態に応じて吸引部21の吸引力を変える制御を行うことができる。
より具体的には、制御部18は、用紙Pが前記第1状態或いは前記第3状態である場合の吸引部21の吸引力を、前記第2状態での前記吸引力より強くする。
用紙Pが前記第1状態或いは前記第3状態である場合、前記第1状態の場合は用紙Pの先端が支持面15上において自由端となり、前記第3状態の場合は用紙Pの後端が支持面15上において自由端となるため、用紙Pが浮き上がり易い。
制御部18が、用紙Pが前記第1状態或いは前記第3状態である場合の前記吸引力を、前記第2状態である場合の前記吸引力より強くすることにより、用紙Pの支持面15上における浮き上がりを抑制できる。
尚、用紙Pが前記第1状態である場合と、用紙Pが前記第3状態である場合と、の間で前記吸引力を変えることも可能であるが、以下の説明においては、用紙Pが前記第1状態である場合と、用紙Pが前記第3状態である場合と、における吸引部21の吸引力は同じであるものとする。
用紙Pが前記第1状態或いは前記第3状態である場合、前記第1状態の場合は用紙Pの先端が支持面15上において自由端となり、前記第3状態の場合は用紙Pの後端が支持面15上において自由端となるため、用紙Pが浮き上がり易い。
制御部18が、用紙Pが前記第1状態或いは前記第3状態である場合の前記吸引力を、前記第2状態である場合の前記吸引力より強くすることにより、用紙Pの支持面15上における浮き上がりを抑制できる。
尚、用紙Pが前記第1状態である場合と、用紙Pが前記第3状態である場合と、の間で前記吸引力を変えることも可能であるが、以下の説明においては、用紙Pが前記第1状態である場合と、用紙Pが前記第3状態である場合と、における吸引部21の吸引力は同じであるものとする。
ここで、媒体支持部14の支持面15を搬送される用紙Pが、吸引部21によって吸引されていると、前記吸引力による経路負荷がかかるので、搬送ローラー対11或いは排出ローラー対12と用紙Pとの間でスリップが発生して、用紙Pの搬送量が減少する場合がある。用紙Pの搬送量の減少は記録画像に例えば白筋として現れ、記録画質が低下する。
この吸引部21による吸引により発生するスリップに由来する用紙Pの搬送量の減少を補正するため、制御部18は、以下の制御(第1の補正制御と第2の補正制御)を行う。
尚、先に「第2の補正制御」について説明し、その後、「第1の補正制御」について説明する。
この吸引部21による吸引により発生するスリップに由来する用紙Pの搬送量の減少を補正するため、制御部18は、以下の制御(第1の補正制御と第2の補正制御)を行う。
尚、先に「第2の補正制御」について説明し、その後、「第1の補正制御」について説明する。
◆第2の補正制御について◆
吸引部21による吸引により発生するスリップに由来して減少する用紙Pの搬送量は、搬送ローラー対11及び排出ローラー対12のうち、用紙Pを挟持して搬送するローラー対の駆動量を補正することにより安定させることができる。つまり、用紙Pの第1状態においては、搬送ローラー対11の駆動量を補正し、第2状態においては、搬送ローラー対11及び排出ローラー対12の双方の駆動量を補正し、第3状態においては、排出ローラー対12の駆動量を補正する。尚、用紙Pの第1状態及び第3状態においては、搬送に寄与しない側のローラー対が、搬送に寄与する側のローラー対と同様に補正されて駆動されてもよい。
吸引部21による吸引により発生するスリップに由来して減少する用紙Pの搬送量は、搬送ローラー対11及び排出ローラー対12のうち、用紙Pを挟持して搬送するローラー対の駆動量を補正することにより安定させることができる。つまり、用紙Pの第1状態においては、搬送ローラー対11の駆動量を補正し、第2状態においては、搬送ローラー対11及び排出ローラー対12の双方の駆動量を補正し、第3状態においては、排出ローラー対12の駆動量を補正する。尚、用紙Pの第1状態及び第3状態においては、搬送に寄与しない側のローラー対が、搬送に寄与する側のローラー対と同様に補正されて駆動されてもよい。
前述した様に、媒体支持部14上に用紙Pの一部がある場合の吸引部21の吸引力は、用紙Pの支持状態によって変更される。前記吸引力が変わると、経路負荷が変わるので吸引により発生するスリップ量も変わり、以って、用紙Pの搬送量の減少量も変わる。
このため、搬送ローラー対11及び排出ローラー対12のうち、搬送に寄与するローラー対の駆動量を補正するための補正値Bは、媒体支持部14上における用紙Pの支持状態によって変えられる。
このため、搬送ローラー対11及び排出ローラー対12のうち、搬送に寄与するローラー対の駆動量を補正するための補正値Bは、媒体支持部14上における用紙Pの支持状態によって変えられる。
すなわち、「第2の補正制御」は、前記媒体搬送方向における用紙Pの端部の位置に係わらず、搬送ローラー対11及び排出ローラー対12のいずれにより用紙Pが搬送されるかによってのみ決まる補正値Bに基づいて、用紙Pを搬送するいずれか一方の搬送部の駆動量を補正する制御である。
表1に、媒体支持部14上における用紙Pの支持状態と、補正値Bとの関係を示す。
表1に、媒体支持部14上における用紙Pの支持状態と、補正値Bとの関係を示す。
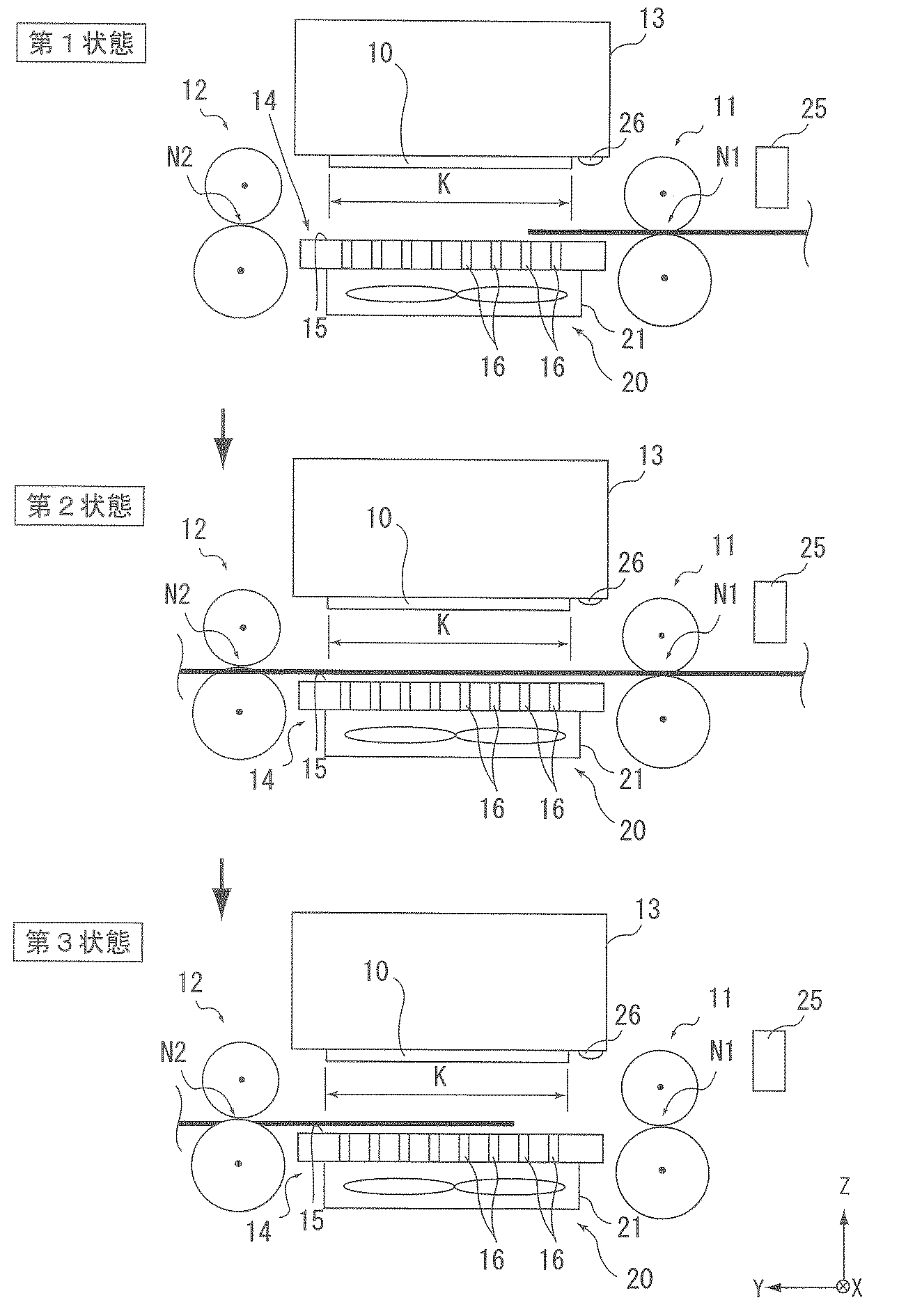
図4の上図及び下図に示すように、用紙Pが前記第1状態及び前記第3状態である場合(片ニップの場合)は、前述したように吸引部21の吸引力は強く設定されるので、吸引による経路負荷が増大するので前記スリップ量が多く、用紙Pの搬送量の減少量も多い。したがって、用紙Pを挟持して搬送するローラー対(用紙Pの第1状態においては搬送ローラー対11、用紙Pの第3状態においては排出ローラー対12)の駆動量の補正値Bは大きくする必要がある。尚、用紙Pが第1状態及び第3状態である場合の補正値をB1(表1)とする。
一方、図4の中図に示すように、用紙Pが前記第2状態である場合(両ニップの場合)は、前記片ニップの場合よりも吸引部21の吸引力が弱く設定されるので、吸引により経路負荷が少なく前記スリップ量も少なくなり、用紙Pの搬送量の減少量も少なくなる。
したがって、用紙Pを挟持して搬送する搬送ローラー対11及び排出ローラー対12の駆動量の補正値Bも小さくする。つまり、用紙Pが第2状態である場合の補正値をB2(表1)とすると、補正値B1>補正値B2となる。
制御部18による「第2の補正制御」の実行により、吸引部21の吸引力の違いに応じた補正値Bを用いて、用紙Pを挟持して搬送するローラー対の駆動量が補正されるので、用紙Pを吸引して用紙Pの支持面15からの浮き上がりを抑制しつつ、適切な搬送量で用紙Pを搬送することができる。
したがって、用紙Pを挟持して搬送する搬送ローラー対11及び排出ローラー対12の駆動量の補正値Bも小さくする。つまり、用紙Pが第2状態である場合の補正値をB2(表1)とすると、補正値B1>補正値B2となる。
制御部18による「第2の補正制御」の実行により、吸引部21の吸引力の違いに応じた補正値Bを用いて、用紙Pを挟持して搬送するローラー対の駆動量が補正されるので、用紙Pを吸引して用紙Pの支持面15からの浮き上がりを抑制しつつ、適切な搬送量で用紙Pを搬送することができる。
◆第1の補正制御について◆
制御部18が実行する第1の補正制御は、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される場合に、前記媒体搬送方向における用紙Pの端部の位置に応じて決まる補正値Cに基づいて、前記媒体を搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の搬送部の駆動量を補正する補正制御である。
制御部18が実行する第1の補正制御は、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される場合に、前記媒体搬送方向における用紙Pの端部の位置に応じて決まる補正値Cに基づいて、前記媒体を搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の搬送部の駆動量を補正する補正制御である。
用紙Pを第2状態(図4の中図)で支持面15に吸着する場合、前記第2状態で用紙Pが搬送されている間、支持面15に吸着される用紙Pの面積は変わらない。したがって、用紙Pが前記第2状態である間に、用紙Pを吸着することによる経路負荷は変化しない(機械的な誤差等による変化は除く)。
一方、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される第1状態(図4の上図)及び第3状態(図4の下図)で、用紙Pを支持面15に吸着する場合、支持面15に吸着される用紙Pの面積が変わる。支持面15に吸着される用紙Pの面積が変わると、吸着機構20の吸着力によって生じる用紙Pに対する経路負荷は変化する。
例えば、支持面15に吸着される用紙Pの面積は大きいほど、用紙Pはしっかりと吸着されるので経路負荷は大きくなり、用紙Pを搬送する搬送ローラー対11や排出ローラー対12はスリップし易くなる。支持面15に吸着される用紙Pの面積が小さいと、経路負荷は小さくなり、搬送ローラー対11や排出ローラー対12に前記スリップは生じ難くなる。
例えば、支持面15に吸着される用紙Pの面積は大きいほど、用紙Pはしっかりと吸着されるので経路負荷は大きくなり、用紙Pを搬送する搬送ローラー対11や排出ローラー対12はスリップし易くなる。支持面15に吸着される用紙Pの面積が小さいと、経路負荷は小さくなり、搬送ローラー対11や排出ローラー対12に前記スリップは生じ難くなる。
また、吸着機構20が、媒体支持部14の支持面15に設けられる吸引孔16と、吸引部21とによって構成されている本実施形態においては、支持面15に吸着される用紙Pの面積が小さくなることは、用紙Pによって孔が塞がれていない開放状態の吸引孔16の数が増えることを意味する。複数の吸引孔16は、一つの吸引部21に連通しているため、開放状態の吸引孔16が多いと、用紙Pによって孔が塞がれた閉塞状態の吸引孔16における吸引力も低下し、これによっても吸着機構20としての吸着力が低下する。
ここで、通常、用紙Pの媒体幅は一定であるため、支持面15に吸着される用紙Pの面積は、用紙Pの媒体搬送方向長さに応じて変化する。
このことを踏まえ、制御部18は、前記第1の補正制御において、前記媒体搬送方向における用紙Pの端部(図5においては先端F1、図6においては後端F2)の位置の情報から、前記媒体搬送方向において用紙Pが吸着機構20が設けられている領域G(図5及び図6)と重なる部分の長さH(例えば、図5及び図6におけるH1、H2、H3)を得て、長さHに応じて補正値Cを決定する。
このことを踏まえ、制御部18は、前記第1の補正制御において、前記媒体搬送方向における用紙Pの端部(図5においては先端F1、図6においては後端F2)の位置の情報から、前記媒体搬送方向において用紙Pが吸着機構20が設けられている領域G(図5及び図6)と重なる部分の長さH(例えば、図5及び図6におけるH1、H2、H3)を得て、長さHに応じて補正値Cを決定する。
具体的には、制御部18は、前記媒体搬送方向における、搬送ローラー対11と排出ローラー対12との間にある用紙Pの一方側端部の位置に応じて長さHを求め、補正値Cを決定する。より具体的には、前記第1状態(図5)の場合には、搬送ローラー対11と排出ローラー対12との間にある用紙Pの先端F1の位置に応じて補正値Cを決定する。また、前記第3状態(図6)の場合には、搬送ローラー対11と排出ローラー対12との間にある用紙Pの後端F2の位置に応じて補正値Cを決定する。
このことによって、一層適切に用紙Pの搬送量を補正することができる。
このことによって、一層適切に用紙Pの搬送量を補正することができる。
尚、本実施形態において、制御部18は、第1センサー25または第2センサー26から送信される検出信号に基づいて、用紙Pの端部(図5に示す先端F1または図6に示す後端F2)の位置を把握する。これにより、精度の高い第1の補正制御を実行することができる。用紙Pの端部の位置を把握するための媒体センサーは、記録領域K(図1)よりも上流側に設けられる他のセンサーを用いることも可能である。また、媒体センサーによらず、例えば、用紙トレイ3から給送ローラー4によるピックアップが行われた時を基準として、各ローラーの駆動量に基づいて用紙Pの端部の位置を把握することも可能である。
以下、図5を参照して、用紙Pが搬送ローラー対11にのみ挟持される第1状態の場合について説明する。
図5は、用紙Pが搬送ローラー対11にのみ挟持される第1状態で、用紙Pが搬送される様子を示している。図5の上図(第1状態−A)においては、用紙Pの先端F1が、吸引孔16dのすぐ上流側に位置し、用紙Pが、複数の吸引孔16のうち、最も上流側に位置する吸引孔16cのみを塞いでいる。用紙Pが領域Gと重なる部分の長さはH1である。
尚、図5及び図6において、Y軸方向における吸引孔16の数は、図の簡略化のため図3よりも少なく描かれている。最も上流側の吸引孔16を符号16cで示し、吸引孔16cから下流側に向かって、吸引孔16d、16e、16fとする。
図5は、用紙Pが搬送ローラー対11にのみ挟持される第1状態で、用紙Pが搬送される様子を示している。図5の上図(第1状態−A)においては、用紙Pの先端F1が、吸引孔16dのすぐ上流側に位置し、用紙Pが、複数の吸引孔16のうち、最も上流側に位置する吸引孔16cのみを塞いでいる。用紙Pが領域Gと重なる部分の長さはH1である。
尚、図5及び図6において、Y軸方向における吸引孔16の数は、図の簡略化のため図3よりも少なく描かれている。最も上流側の吸引孔16を符号16cで示し、吸引孔16cから下流側に向かって、吸引孔16d、16e、16fとする。
図5の中図(第1状態−B)は、用紙Pが図5の上図の状態から下流側に搬送された状態を示している。図5の中図においては、用紙Pの先端F1が、吸引孔16eのすぐ上流側に位置し、用紙Pが、複数の吸引孔16のうち吸引孔16dまでを塞いでいる。用紙Pが領域Gと重なる部分の長さはH2である。
図5の下図(第1状態−C)は、用紙Pが図5の中図の状態から更に下流側に搬送された状態を示している。図5の下図においては、用紙Pの先端F1が、吸引孔16fのすぐ上流側に位置し、用紙Pが、複数の吸引孔16のうち吸引孔16eまでを塞いでいる。用紙Pが領域Gと重なる部分の長さはH3である。
図5の下図の状態から用紙Pが更に下流側に搬送されて、用紙Pが領域Gに完全に重なると、複数の吸引孔16のすべて、すなわち、吸引孔16cから吸引孔16fを用紙Pが塞ぐ。このときの長さHをH4とする(図5には記載なし)。
また、用紙Pが第1状態であるが領域Gに重なる前、用紙Pの先端F1が吸引孔16cよりも上流側に位置する場合は、長さH=0(ゼロ)とする。
用紙Pの先端F1が排出ローラー対12に挟持されると、用紙Pは第2状態(図4の中図)になる。用紙Pが第2状態では、第1の補正制御は実行しない。前記第2状態を経て、用紙Pの後端F2(図6)が搬送ローラー対11のニップ点N1を抜けると、用紙Pの第3状態(図6)となる。
また、用紙Pが第1状態であるが領域Gに重なる前、用紙Pの先端F1が吸引孔16cよりも上流側に位置する場合は、長さH=0(ゼロ)とする。
用紙Pの先端F1が排出ローラー対12に挟持されると、用紙Pは第2状態(図4の中図)になる。用紙Pが第2状態では、第1の補正制御は実行しない。前記第2状態を経て、用紙Pの後端F2(図6)が搬送ローラー対11のニップ点N1を抜けると、用紙Pの第3状態(図6)となる。
続いて、図6を参照して、用紙Pが排出ローラー対12にのみ挟持される第3状態の場合について説明する。
図6は、前記第3状態で用紙Pが搬送される様子を示している。図6の上図(第3状態−A)においては、用紙Pの後端F2が、吸引孔16cよりも下流側に位置し、用紙Pが、複数の吸引孔16のうち、最も上流側に位置する吸引孔16c以外の吸引孔16d〜16fを塞いでいる。用紙Pが領域Gと重なる部分の長さはH3である。
尚、図6には示していないが、用紙Pの後端F2が搬送ローラー対11のニップ点N1を抜けた後、吸引孔16cのすぐ上流側に位置して、用紙Pが複数の吸引孔16のすべて(吸引孔16c〜16f)を塞ぐ場合、用紙Pが領域Gと重なる部分の長さをH4とする。
図6は、前記第3状態で用紙Pが搬送される様子を示している。図6の上図(第3状態−A)においては、用紙Pの後端F2が、吸引孔16cよりも下流側に位置し、用紙Pが、複数の吸引孔16のうち、最も上流側に位置する吸引孔16c以外の吸引孔16d〜16fを塞いでいる。用紙Pが領域Gと重なる部分の長さはH3である。
尚、図6には示していないが、用紙Pの後端F2が搬送ローラー対11のニップ点N1を抜けた後、吸引孔16cのすぐ上流側に位置して、用紙Pが複数の吸引孔16のすべて(吸引孔16c〜16f)を塞ぐ場合、用紙Pが領域Gと重なる部分の長さをH4とする。
図6の中図(第3状態−B)は、用紙Pが図6の上図の状態から下流側に搬送された状態を示している。図6の中図においては、用紙Pの後端F2が、吸引孔16dよりも下流側に位置し、用紙Pが、複数の吸引孔16のうち吸引孔16eから吸引孔16fまでを塞いでいる。用紙Pが領域Gと重なる部分の長さはH2である。
図6の下図(第3状態−C)は、用紙Pが図6の中図の状態から更に下流側に搬送された状態を示している。図6の下図においては、用紙Pの後端F2が、吸引孔16eよりも下流側に位置し、用紙Pが、複数の吸引孔16のうち、最も下流側にある吸引孔16fを塞いでいる。用紙Pが領域Gと重なる部分の長さはH3である。
図6の下図の状態から用紙Pが更に下流側に搬送されて、用紙Pの後端F2が、吸引孔16fよりも下流側になると、用紙Pは領域Gから抜けて、複数の吸引孔16のすべて、すなわち、吸引孔16cから吸引孔16fが開放状態となる。このときの長さH=0(ゼロ)とする。
図6の下図の状態から用紙Pが更に下流側に搬送されて、用紙Pの後端F2が、吸引孔16fよりも下流側になると、用紙Pは領域Gから抜けて、複数の吸引孔16のすべて、すなわち、吸引孔16cから吸引孔16fが開放状態となる。このときの長さH=0(ゼロ)とする。
ここで、以下に示す表2に、媒体搬送方向において用紙Pが領域Gと重なる長さHと、補正値Cとの関係を示す。
尚、表2に示す補正値C1〜補正値C3の大小関係は、補正値C1<補正値C2<補正値C3である。
尚、表2に示す補正値C1〜補正値C3の大小関係は、補正値C1<補正値C2<補正値C3である。
補正値Cは、搬送ローラー対11及び排出ローラー対12の間にある、用紙Pの一方側端部の位置が、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方のローラー対から離れているほど、大きく設定されている。
つまり、図5に示す用紙Pの第1状態では、用紙Pの先端F1が、用紙Pを搬送する搬送ローラー対11から遠く排出ローラー対12に近い位置にあるほど、搬送ローラー対11の駆動量の補正値Cが大きく設定される。図6に示す用紙Pの第3状態では、用紙Pの後端F2が、用紙Pを搬送する排出ローラー対12から遠く、搬送ローラー対11に近い位置にあるほど、搬送ローラー対11の駆動量の補正値Cが大きく設定される。
つまり、図5に示す用紙Pの第1状態では、用紙Pの先端F1が、用紙Pを搬送する搬送ローラー対11から遠く排出ローラー対12に近い位置にあるほど、搬送ローラー対11の駆動量の補正値Cが大きく設定される。図6に示す用紙Pの第3状態では、用紙Pの後端F2が、用紙Pを搬送する排出ローラー対12から遠く、搬送ローラー対11に近い位置にあるほど、搬送ローラー対11の駆動量の補正値Cが大きく設定される。
言い換えると、用紙Pの第1状態(図5)における先端F1の位置が、用紙Pを搬送する搬送ローラー対11から離れているほど、制御部18は、前記第1の補正制御において、搬送ローラー対11の駆動量を増やす。
また、用紙Pの第3状態(図6)における後端F2の位置が、用紙Pを搬送する排出ローラー対12から離れているほど、制御部18は、前記第1の補正制御において、排出ローラー対12の駆動量を増やす。
また、用紙Pの第3状態(図6)における後端F2の位置が、用紙Pを搬送する排出ローラー対12から離れているほど、制御部18は、前記第1の補正制御において、排出ローラー対12の駆動量を増やす。
搬送ローラー対11及び排出ローラー対12との間にある用紙Pの前記一方側端部(第1状態の場合は先端F1、第3状態の場合は後端F2)の位置が、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方から離れていると、用紙Pが吸着機構20が設けられている領域Gと重なる領域の長さHが長くなる(表2において、長さH4>長さH3>長さH2>長さH1)。
このとき、長さHが長くなるほど、吸着機構20の前記吸着力に由来する用紙Pに対する経路負荷が増すので、搬送ローラー対11及び排出ローラー対12のいずれか一方における搬送量の減少量が増す。
以上のことから、表2に示すように、長さHの増加に応じて、補正値Cが大きい値に設定される(表2において、補正値C3>補正値C2>補正値C1)。
尚、表2においては、長さHが0〜H1未満の場合の補正値C0はゼロ(補正なし)を含み、補正値C1より小さい補正値とすることができる。
このとき、長さHが長くなるほど、吸着機構20の前記吸着力に由来する用紙Pに対する経路負荷が増すので、搬送ローラー対11及び排出ローラー対12のいずれか一方における搬送量の減少量が増す。
以上のことから、表2に示すように、長さHの増加に応じて、補正値Cが大きい値に設定される(表2において、補正値C3>補正値C2>補正値C1)。
尚、表2においては、長さHが0〜H1未満の場合の補正値C0はゼロ(補正なし)を含み、補正値C1より小さい補正値とすることができる。
以上のような第1の補正制御を実行することにより、以下の作用効果が得られる。
すなわち、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって、図5の上図〜下図、或いは図6の上図〜下図のように搬送されていく間に、用紙Pにかかる吸着機構20の吸着力が変化した場合に、用紙Pの搬送量の適切な補正を実現できる。
すなわち、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって、図5の上図〜下図、或いは図6の上図〜下図のように搬送されていく間に、用紙Pにかかる吸着機構20の吸着力が変化した場合に、用紙Pの搬送量の適切な補正を実現できる。
特に、本実施形態のように、吸着機構20が、媒体支持部14の支持面15に設けられる吸引孔16と、吸引部21と、によって構成されている場合には、制御部18は、前記第1の補正制御において、用紙Pによって塞がれる吸引孔16の数が多いほど、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の駆動量を増やす構成とすると良い。
用紙Pによって塞がれる吸引孔16の数が多いと、用紙Pにおける前記吸着力(吸引力)による経路負荷が増えるので、前記経路負荷に起因する、用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方による搬送量の減少量が多くなる。
したがって、用紙Pによって塞がれる吸引孔16の数が多いほど、補正値Cを大きくして用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の駆動量を増やすことにより、用紙Pの搬送量の適切な補正を実現できる。
したがって、用紙Pによって塞がれる吸引孔16の数が多いほど、補正値Cを大きくして用紙Pを搬送する搬送ローラー対11及び排出ローラー対12のいずれか一方の駆動量を増やすことにより、用紙Pの搬送量の適切な補正を実現できる。
尚、本実施形態では、媒体支持部14の支持面15に小さな吸引孔16を媒体搬送方向に沿って複数配置する構成としたが、支持面15において吸引力を発生させるための穴を大きくして、単一の穴から吸引する構成とすることができる。本実施例と同様に、用紙Pの媒体搬送方向の端部の位置に応じて補正値Cを決定し、第1の補正制御を実行することができる。
また、制御部18は、前記第1の補正制御において、用紙Pの種類に応じて補正値Cを変えるように構成することができる。
用紙Pの種類としては、例えば、記録面やその裏面の表面状態が異なる用紙、厚みや剛性の異なる用紙、サイズの異なる用紙等が挙げられる。
例えば、用紙Pの種類として、表面状態の異なる種類の用紙について考える。用紙Pの表面の摩擦係数が小さい場合には、搬送ローラー対11及び排出ローラー対12において用紙Pがスリップし易い。一方、用紙Pの表面の摩擦係数が大きい場合には、摩擦係数が小さい場合よりも、搬送ローラー対11及び排出ローラー対12における用紙Pのスリップは生じにくくなる。よって、摩擦係数が小さいほど、補正値Cの値を大きくして、摩擦係数が大きいほど、補正値Cの値を小さくすることができる。
用紙Pの種類としては、例えば、記録面やその裏面の表面状態が異なる用紙、厚みや剛性の異なる用紙、サイズの異なる用紙等が挙げられる。
例えば、用紙Pの種類として、表面状態の異なる種類の用紙について考える。用紙Pの表面の摩擦係数が小さい場合には、搬送ローラー対11及び排出ローラー対12において用紙Pがスリップし易い。一方、用紙Pの表面の摩擦係数が大きい場合には、摩擦係数が小さい場合よりも、搬送ローラー対11及び排出ローラー対12における用紙Pのスリップは生じにくくなる。よって、摩擦係数が小さいほど、補正値Cの値を大きくして、摩擦係数が大きいほど、補正値Cの値を小さくすることができる。
また、用紙Pの種類として、厚みの違う用紙Pについて考えた場合、厚みが厚いほど、用紙Pにかかる前記吸着力の変化が用紙Pの搬送量の変化に影響し難い傾向がある。これは、以下のような理由による。
すなわち、搬送ローラー対11において、搬送従動ローラー11b(図2)は、図示を省略するバネ等の付勢手段により搬送駆動ローラー11aに向けて押し付けられるように構成されている。排出ローラー対12も、搬送ローラー対11と同様の構成を有している。以下においては、搬送ローラー対11に用紙Pが挟持される場合について説明し、排出ローラー対12に用紙Pが挟持される場合については説明を省略する。
すなわち、搬送ローラー対11において、搬送従動ローラー11b(図2)は、図示を省略するバネ等の付勢手段により搬送駆動ローラー11aに向けて押し付けられるように構成されている。排出ローラー対12も、搬送ローラー対11と同様の構成を有している。以下においては、搬送ローラー対11に用紙Pが挟持される場合について説明し、排出ローラー対12に用紙Pが挟持される場合については説明を省略する。
厚紙の用紙Pが搬送ローラー対11に挟持されると、厚紙が搬送従動ローラー11bを前記バネの付勢力に抗して押し上げるとともに、厚紙が前記バネを押し上げた力の反作用の力が前記厚紙にかかるので、前記厚紙は、搬送ローラー対11によってしっかりと挟持されてスリップし難くなる。一方、用紙Pが薄紙の場合には、薄紙が搬送従動ローラー11bを前記バネの付勢力に抗して押し上げる押し上げ量は厚紙の場合よりも少ないので、薄紙が前記バネを押し上げた力の反作用の力も少なく、厚紙の場合よりも搬送ローラー対11のニップ圧が低くなる。以って、スリップし易くなる。
このことから、用紙Pの厚みが薄く、スリップし易い用紙の場合には、補正値Cの値を大きくして、用紙Pの厚みが厚く、スリップし難い用紙の場合には、補正値Cの値を小さくすることができる。
このことから、用紙Pの厚みが薄く、スリップし易い用紙の場合には、補正値Cの値を大きくして、用紙Pの厚みが厚く、スリップし難い用紙の場合には、補正値Cの値を小さくすることができる。
また、用紙Pの幅(X軸方向)が異なる用紙ついて考えると、複数の吸引孔16は、プリンター1において記録可能な最大サイズの用紙(図3において用紙P1)の媒体幅方向(X方向)の端部を吸引できるように、支持面15のほぼ全域に亘って設けられている。しかし、記録可能な最大サイズの用紙P1よりも小さいサイズの用紙P2を搬送する際には、図3に示すように、前記媒体幅方向の端部側の吸引孔16a上には用紙P2がなく、開放状態になる。複数の吸引孔16は一つの吸引部21に連通しているため、用紙P2が搬送される場合に吸引孔16aが開放状態となると、用紙P2によって孔が塞がれた閉塞状態の吸引孔16bにおける吸引力が低下し、これによって吸着機構20の吸着力が低下する。
つまり、用紙P1と用紙P2の媒体搬送方向の端部の位置が同じであっても、用紙P1に作用する吸着力は、用紙P2に作用する吸着力よりも小さくなる。
このことから、媒体幅が狭い用紙P2を搬送する場合の補正値Cは、媒体幅が広い用紙P1を搬送する場合の補正値Cよりも小さくすることができる。
つまり、用紙P1と用紙P2の媒体搬送方向の端部の位置が同じであっても、用紙P1に作用する吸着力は、用紙P2に作用する吸着力よりも小さくなる。
このことから、媒体幅が狭い用紙P2を搬送する場合の補正値Cは、媒体幅が広い用紙P1を搬送する場合の補正値Cよりも小さくすることができる。
以上のように、制御部18が、前記第1の補正制御において、用紙Pの種類に応じて補正値Cを変えることにより、異なる種類の用紙Pを適切な搬送量で搬送することができる。
また、本実施形態において、制御部18は、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれか一方によって搬送される場合、すなわち、片ニップの場合に、前記第1の補正制御と、前記第2補正制御と、のいずれかを選択可能に構成されている。
用紙Pの種類によっては、搬送されることにより吸着機構20が設けられる領域Gに重なる用紙Pの長さHが変わり、用紙Pにかかる前記吸着力が変化しても、その搬送量に影響が出にくい場合がある。そのような用紙Pの種類としては、前述した厚紙が挙げられる。
このような種類の用紙に対しては、前記第1の補正制御を行わず、前記第2補正制御を選択することができる。
このような種類の用紙に対しては、前記第1の補正制御を行わず、前記第2補正制御を選択することができる。
前記第1の補正制御は、用紙Pへの記録内容がテキスト(文字)である場合には、実行しない構成とすることができる。
支持面15に用紙Pを吸着した場合に起こる、搬送ローラー対11や排出ローラー対12のスリップに由来する用紙Pの搬送量の減少は、例えば、用紙Pへの記録内容が写真やイラスト等であって、用紙の広範囲に亘ってインクを隙間なく噴射するような記録を行う場合に、記録画像に白筋になって見え易く、画質への影響が顕著である。
一方、用紙Pへの記録内容がテキスト(文字)である場合には、文字間の空白があるため、搬送ローラー対11や排出ローラー対12がスリップして用紙Pの搬送量の減少が生じても画質への影響は見え難い。したがって、前記第1の補正制御を省略することができる。
支持面15に用紙Pを吸着した場合に起こる、搬送ローラー対11や排出ローラー対12のスリップに由来する用紙Pの搬送量の減少は、例えば、用紙Pへの記録内容が写真やイラスト等であって、用紙の広範囲に亘ってインクを隙間なく噴射するような記録を行う場合に、記録画像に白筋になって見え易く、画質への影響が顕著である。
一方、用紙Pへの記録内容がテキスト(文字)である場合には、文字間の空白があるため、搬送ローラー対11や排出ローラー対12がスリップして用紙Pの搬送量の減少が生じても画質への影響は見え難い。したがって、前記第1の補正制御を省略することができる。
尚、本実施形態において、「第1搬送部」及び「第2搬送部」は、用紙をニップして搬送するローラー対(搬送ローラー対11及び排出ローラー対12)としたが、「第1搬送部」及び「第2搬送部」として、例えば、駆動ローラーと従動ローラーにベルトが掛け回されて構成されるベルト搬送部を用いることも可能である。
[第2の実施形態]
以下においては、第1の補正制御における他の構成について説明する。
本実施形態において、搬送ローラー対11が用紙Pに付与する送り力は、排出ローラー対12が用紙Pに付与する送り力より大きくように構成されている。
より具体的には、搬送ローラー対11(図2)は、いわゆるSMAPローラーとして構成されている。SMAPローラーは、搬送駆動ローラー11aが、金属軸(SMAP軸)の表面にアルミナ粒子等の砥粒を塗布して形成されており、搬送従動ローラー11bが、図示を省略するバネ等の付勢手段により付勢されて、搬送駆動ローラー11aに圧接して構成されている。
SMAPローラーとして構成された搬送ローラー対11は、搬送駆動ローラー11aの表面の砥粒が用紙Pに食い付いて搬送するため、用紙Pに付与する送り力が大きく、搬送量が比較的安定する。
以下においては、第1の補正制御における他の構成について説明する。
本実施形態において、搬送ローラー対11が用紙Pに付与する送り力は、排出ローラー対12が用紙Pに付与する送り力より大きくように構成されている。
より具体的には、搬送ローラー対11(図2)は、いわゆるSMAPローラーとして構成されている。SMAPローラーは、搬送駆動ローラー11aが、金属軸(SMAP軸)の表面にアルミナ粒子等の砥粒を塗布して形成されており、搬送従動ローラー11bが、図示を省略するバネ等の付勢手段により付勢されて、搬送駆動ローラー11aに圧接して構成されている。
SMAPローラーとして構成された搬送ローラー対11は、搬送駆動ローラー11aの表面の砥粒が用紙Pに食い付いて搬送するため、用紙Pに付与する送り力が大きく、搬送量が比較的安定する。
一方、排出ローラー対12(図2)は、排出駆動ローラー12aが、例えば、ゴムローラーで形成され、排出従動ローラー12bが、排出駆動ローラー12aに対して軽く接するギザローラーで構成される。このことによって、記録面にギザローラーの排出従動ローラー12bが軽く接するので、記録面のインクが排出従動ローラー12bに付着することを抑制できる。
しかし、このように構成された排出ローラー対12は、用紙Pに付与する送り力が、搬送ローラー対11よりも小さくなる。用紙Pに付与する送り力が小さい排出ローラー対12は、搬送ローラー対11に比して搬送量が安定し難く、用紙のスリップが生じ易い。
しかし、このように構成された排出ローラー対12は、用紙Pに付与する送り力が、搬送ローラー対11よりも小さくなる。用紙Pに付与する送り力が小さい排出ローラー対12は、搬送ローラー対11に比して搬送量が安定し難く、用紙のスリップが生じ易い。
このように、搬送ローラー対11が用紙Pに付与する送り力が、排出ローラー対12が用紙Pに付与する送り力より大きい構成の場合に、制御部18が実行する前記第1の補正制御における、用紙Pが搬送ローラー対11によって搬送される場合(図5に示す第1状態)における搬送ローラー対11の駆動量の補正値Caは、用紙Pが排出ローラー対12によって搬送される場合(図6に示す第3状態)における排出ローラー対12の駆動量の補正値Cbよりも小さく設定することができる。
以下に示す表3に、媒体搬送方向において用紙Pが領域Gと重なる長さHと、搬送ローラー対11の駆動量の補正値Ca及び排出ローラー対12の駆動量の補正値Cbとの関係を示す。
以下に示す表3に、媒体搬送方向において用紙Pが領域Gと重なる長さHと、搬送ローラー対11の駆動量の補正値Ca及び排出ローラー対12の駆動量の補正値Cbとの関係を示す。
用紙Pが第1状態の場合(図5)に、媒体搬送方向において用紙Pが領域Gと重なる長さHが、H1以上、H2未満までである場合の補正値CaをCa1とし、H2以上、H3未満までである場合の補正値CaをCa2とし、H3以上、H4までである場合の補正値CaをCa3とする。
また、用紙Pが第3状態の場合(図6)に、媒体搬送方向において用紙Pが領域Gと重なる長さHが、H1以上、H2未満までである場合の補正値CbをCb1とし、H2以上、H3未満までである場合の補正値CbをCb2とし、H3以上、H4までである場合の補正値CbをCb3とする。
このとき、補正値Ca1<補正値Cb1、補正値Ca2<補正値Cb2、補正値Ca3<補正値Cb3、が成り立つように各補正値が設定されている。
また、用紙Pが第3状態の場合(図6)に、媒体搬送方向において用紙Pが領域Gと重なる長さHが、H1以上、H2未満までである場合の補正値CbをCb1とし、H2以上、H3未満までである場合の補正値CbをCb2とし、H3以上、H4までである場合の補正値CbをCb3とする。
このとき、補正値Ca1<補正値Cb1、補正値Ca2<補正値Cb2、補正値Ca3<補正値Cb3、が成り立つように各補正値が設定されている。
用紙Pに付与する送り力が大きく、搬送量が安定する搬送ローラー対11の駆動量の補正値Caを、搬送ローラー対11に比して用紙のスリップが発生し易い排出ローラー対12の駆動量の補正値Cbよりも小さくするので、用紙Pが搬送ローラー対11及び排出ローラー対12のいずれで搬送されるかに応じて、用紙Pの搬送量の適切な補正を実現できる。
1…インクジェットプリンター(記録装置)、2…筐体、3…用紙トレイ、
4…給送ローラー、5…分離ローラー対、6…第1中間ローラー、
7…第2中間ローラー、8a、8b…従動ローラー、9a、9b…従動ローラー、
10…記録ヘッド、11…搬送ローラー対(第1搬送部)、
12…排出ローラー対(第2搬送部)、13…キャリッジ、14…媒体支持部、
15…支持面、16…吸引孔、17…排紙トレイ、18…制御部、
19…駆動源、20…吸着機構、21…吸引部、21a…回転羽根、
22…駆動源、23a、23b…回転軸、24a、24b…回転軸、
25…第1センサー、26…第2センサー、
P、P1、P2…用紙、N1、N2…ニップ部
4…給送ローラー、5…分離ローラー対、6…第1中間ローラー、
7…第2中間ローラー、8a、8b…従動ローラー、9a、9b…従動ローラー、
10…記録ヘッド、11…搬送ローラー対(第1搬送部)、
12…排出ローラー対(第2搬送部)、13…キャリッジ、14…媒体支持部、
15…支持面、16…吸引孔、17…排紙トレイ、18…制御部、
19…駆動源、20…吸着機構、21…吸引部、21a…回転羽根、
22…駆動源、23a、23b…回転軸、24a、24b…回転軸、
25…第1センサー、26…第2センサー、
P、P1、P2…用紙、N1、N2…ニップ部
Claims (10)
- 搬送される媒体に液体を噴射して記録を行う記録ヘッドと、
前記記録ヘッドに対向して配置され、前記媒体を支持する支持面を備える媒体支持部と、
前記記録ヘッドによる記録領域に対して媒体搬送方向上流側に設けられる第1搬送部と、
前記記録ヘッドによる記録領域に対して媒体搬送方向下流側に設けられる第2搬送部と、
前記媒体支持部の前記支持面に前記媒体を吸着する吸着力を発生させる吸着機構と、
前記第1搬送部及び前記第2搬送部の駆動を制御する制御部と、を備え、
前記制御部は、
前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、前記媒体搬送方向における前記媒体の端部の位置に応じて決まる補正値に基づいて、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を補正する補正制御を実行する、
ことを特徴とする記録装置。 - 請求項1に記載の記録装置において、
前記制御部は、前記補正制御において、前記媒体搬送方向における前記媒体の端部の位置の情報から、前記媒体搬送方向において前記媒体が前記吸着機構が設けられている領域と重なる部分の長さを得て、前記長さに応じて前記補正値を決定する、
ことを特徴とする記録装置。 - 請求項1または請求項2に記載の記録装置において、
前記制御部は、前記補正制御において、前記媒体搬送方向における、前記第1搬送部と前記第2搬送部との間にある前記媒体の一方側端部の位置に応じて前記補正値を決定する、
ことを特徴とする記録装置。 - 請求項3に記載の記録装置において、
前記制御部は、前記補正制御において、前記一方側端部の位置が、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部から離れているほど、前記搬送部の駆動量を増やす、
ことを特徴とする記録装置。 - 請求項1から請求項4のいずれか一項に記載の記録装置において、
前記媒体の通過を検出する検出部を備え、
前記制御部は、前記検出部から送信される検出信号に基づいて前記媒体の前記端部の位置を把握する、
ことを特徴とする記録装置。 - 請求項1から請求項5のいずれか一項に記載の記録装置において、
前記第1搬送部が前記媒体に付与する送り力は、前記第2搬送部が前記媒体に付与する送り力より大きく、
前記補正制御における、前記媒体が前記第1搬送部によって搬送される場合における前記第1搬送部の駆動量の補正値は、前記媒体が前記第2搬送部によって搬送される場合における前記第2搬送部の駆動量の補正値よりも小さい、
ことを特徴とする記録装置。 - 請求項1から請求項6のいずれか一項に記載の記録装置において、
前記吸着機構は、
前記媒体支持部の前記支持面に、前記媒体搬送方向に沿って複数設けられる吸引孔と、
前記複数の吸引孔に、前記支持面に前記媒体を吸着するための吸引力を発生させる吸引部と、を備えて構成される、
ことを特徴とする記録装置。 - 請求項7に記載の記録装置において、
前記制御部は、前記補正制御において、前記媒体によって塞がれる前記吸引孔の数が多いほど、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を増やす、
ことを特徴とする記録装置。 - 請求項1から請求項8のいずれか一項に記載の記録装置において、
前記制御部は、前記補正制御において、前記媒体の種類に応じて前記補正値を変える、
ことを特徴とする記録装置。 - 請求項1から請求項9のいずれか一項に記載の記録装置において、
前記補正制御を第1の補正制御とし、
前記制御部は、前記媒体が前記第1搬送部及び前記第2搬送部のいずれか一方によって搬送される場合に、前記第1の補正制御と、
前記媒体搬送方向における前記媒体の端部の位置に係わらず、前記第1搬送部及び前記第2搬送部のいずれにより前記媒体が搬送されるかによってのみ決まる補正値に基づいて、前記媒体を搬送する前記第1搬送部及び前記第2搬送部のいずれか一方の搬送部の駆動量を補正する第2補正制御と、のいずれかを選択可能である、
ことを特徴とする記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165175A JP2019042936A (ja) | 2017-08-30 | 2017-08-30 | 記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165175A JP2019042936A (ja) | 2017-08-30 | 2017-08-30 | 記録装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019042936A true JP2019042936A (ja) | 2019-03-22 |
Family
ID=65813551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017165175A Pending JP2019042936A (ja) | 2017-08-30 | 2017-08-30 | 記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019042936A (ja) |
-
2017
- 2017-08-30 JP JP2017165175A patent/JP2019042936A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5197162B2 (ja) | シート搬送装置及び画像形成装置 | |
| JP6410575B2 (ja) | シート供給装置およびプリント装置 | |
| CN202053692U (zh) | 印刷装置 | |
| JP5419576B2 (ja) | インクジェット記録装置およびインクジェット記録装置の記録媒体搬送方法 | |
| JP2018118430A (ja) | 媒体搬送装置、記録装置 | |
| JP2018158776A (ja) | 記録装置 | |
| JP6669412B2 (ja) | プリント装置 | |
| JP2008137196A (ja) | 記録媒体搬送装置 | |
| US10526153B2 (en) | Printing apparatus | |
| JP2019042936A (ja) | 記録装置 | |
| JP4182353B2 (ja) | 被記録媒体給送装置、記録装置 | |
| JP2019043073A (ja) | 記録装置 | |
| JP2000153604A (ja) | インクジェット記録装置 | |
| JP2007160879A (ja) | 画像記録装置 | |
| JP5549803B2 (ja) | 記録装置 | |
| JP6213433B2 (ja) | インクジェット記録装置 | |
| CN114940405B (zh) | 输送装置 | |
| JP2018039200A (ja) | 記録装置 | |
| JP3572002B2 (ja) | シート材搬送装置及び画像形成装置 | |
| JP4561999B2 (ja) | 被記録媒体搬送装置、記録装置、記録装置の製造方法、液体噴射装置 | |
| JP2019025738A (ja) | 記録装置 | |
| JP2007161371A (ja) | 給紙装置 | |
| JP7109183B2 (ja) | 搬送装置 | |
| JP2006247932A (ja) | 被記録媒体搬送装置、記録装置、液体噴射装置 | |
| JP2016022998A (ja) | 印刷装置、及び、印刷方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190920 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20191209 |