以下、添付の図面を参照しながら、本発明の実施形態について説明する。なお、この実施形態に記載されている構成要素はあくまでも例示であり、本発明の範囲をそれらのみに限定する趣旨のものではない。図面においては、理解容易のため、必要に応じて各部の寸法や数が誇張または簡略化して図示されている場合がある。
<1. 第1実施形態>
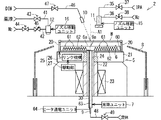
図1は、第1実施形態に係る基板処理装置1の内部のレイアウトを説明するための図解的な平面図である。基板処理装置1は、シリコンウエハなどの基板Wを一枚ずつ処理する枚葉式の装置である。この実施形態では、基板Wは、円板状に形成されている。
基板処理装置1は、複数の処理ユニット2、ロードポートLP、搬送ロボットIR、搬送ロボットCRおよび制御ユニット3を含む。処理ユニット2は、処理液で基板Wを処理する。複数の処理ユニット2は、たとえば、同様の構成を有している。ロードポートLPは、処理ユニット2で処理される複数枚の基板Wを収容するキャリヤCが載置される。搬送ロボットIRは、キャリヤCと搬送ロボットCRとの間で基板Wを搬送する。搬送ロボットCRは、搬送ロボットIRと処理ユニット2との間で基板Wを搬送する。制御ユニット3は、基板処理装置1の各要素の動作を制御する。
図2は、処理ユニット2の構成例を説明するための図解的な断面図である。処理ユニット2は、スピンチャック5、ヒータユニット6、昇降ユニット7、カップ8と、下面ノズル9、DIWノズル10、第1移動ノズル11、第2移動ノズル12およびチャンバ13(図1参照)を備えている。
スピンチャック5は、一枚の基板Wを水平な姿勢で保持しながら、基板Wの中央部を通る鉛直な回転軸線A1まわりに基板Wを回転させる。ヒータユニット6は、基板Wを下面側から加熱する。昇降ユニット7は、ヒータユニット6を基板Wの下方で上下動させる。カップ8は、スピンチャック5を取り囲み可能な筒状に形成されている。下面ノズル9は、基板Wの下面に処理流体を供給する。DIWノズル10は、基板Wの上面にリンス液としての脱イオン水(DIW)を供給する。第1移動ノズル11および第2移動ノズル12は、基板Wの上方で移動可能に構成されている。チャンバ13は、カップ8を収容可能に構成されている。チャンバ13には、基板Wを搬入/搬出するための搬入/搬出口が形成されており、この搬入/搬出口を開閉するシャッタユニットが備えられている。
スピンチャック5は、チャックピン20(チャック部材)と、スピンベース21と、スピンベース21の下面中央に結合された回転軸22と、回転軸22に回転力を与える電動モータ23とを含む。回転軸22は回転軸線A1に沿って鉛直方向に延びており、この実施形態では中空軸である。回転軸22の上端に、スピンベース21が結合されている。スピンベース21は、水平方向に沿う円盤形状を有している。スピンベース21の上面の周縁部には、複数のチャックピン20が周方向に間隔を空けて配置されている。
複数のチャックピン20は、基板Wの周端に接触して基板Wを把持する閉状態と、基板Wの周端から退避した開状態との間で開閉可能である。また、複数のチャックピン20は、開状態において、基板Wの周縁部の下面に接触して、基板Wを下方から支持する。
チャックピン駆動ユニット25は、チャックピン20を開閉駆動する。チャックピン駆動ユニット25は、たとえば、スピンベース21に内蔵されたリンク機構26と、スピンベース21外に配置された駆動源27とを含む。駆動源27は、たとえば、ボールねじ機構と、それに駆動力を与える電動モータとを含む。
ヒータユニット6は、スピンベース21の上方に配置されている。ヒータユニット6の下面には、回転軸線A1に沿って鉛直方向に延びる昇降軸30が結合されている。昇降軸30は、スピンベース21の中央部に形成された貫通孔24と、中空の回転軸22とを挿通している。昇降軸30の下端は、回転軸22の下端よりもさらに下方にまで延びている。この昇降軸30の下端に、昇降ユニット7が結合されている。昇降ユニット7を作動させることにより、ヒータユニット6は、スピンベース21の上面に近い下位置から、基板Wの下面を支持してチャックピン20から持ち上げる上位置までの間で上下動する。
昇降ユニット7は、たとえば、ボールねじ機構と、それに駆動力を与える電動モータとを含む。これにより、昇降ユニット7は、下位置および上位置の間の任意の中間位置にヒータユニット6を配置する。たとえば、ヒータユニット6の上面である加熱面6aを基板Wの下面との間に所定の間隔を開けた離隔位置に配置した状態で、加熱面6aからの輻射熱によって基板Wを加熱できる。また、ヒータユニット6で基板Wを持ち上げれば、加熱面6aを基板Wの下面に接触させた接触状態で、加熱面6aからの熱伝導により、基板Wをより大きな熱量で加熱できる。このように、昇降ユニット7は、基板Wの下面に対してヒータユニット6(加熱部)を接離させる接離部の一例である。
第1移動ノズル11は、第1ノズル移動ユニット15によって、水平方向および鉛直方向に移動する。第1移動ノズル11は、水平方向への移動によって、基板Wの上面の回転中心に対向する処理位置と、基板Wの上面に対向しないホーム位置(退避位置)との間で移動する。ここで、「基板Wの上面の回転中心」とは、基板Wの上面における回転軸線A1との交差位置である。「基板Wの上面に対向しないホーム位置」とは、平面視において、スピンベース21の外方の位置であり、具体的には、カップ8の外方の位置であってもよい。
第1移動ノズル11は、鉛直方向への移動によって、基板Wの上面に接近したり、基板Wの上面から上方に退避したりする。第1ノズル移動ユニット15は、たとえば、鉛直方向に沿う回動軸と、回動軸に結合されて水平に延びるアームと、アームを駆動するアーム駆動機構とを含む。アーム駆動機構は、回動軸を鉛直な回動軸線まわりに回動させることによってアームを揺動させ、回動軸を鉛直方向に沿って昇降させることによって、アームを上下動させる。第1移動ノズル11はこのアームに固定され得る。アームの揺動および昇降に応じて、第1移動ノズル11が水平方向および垂直方向に移動する。
第2移動ノズル12は、第2ノズル移動ユニット16によって、水平方向および垂直方向に移動する。第2移動ノズル12は、水平方向への移動によって、基板Wの上面の回転中心に対向する位置と、基板Wの上面に対向しないホーム位置(退避位置)との間で移動する。ここで、「ホーム位置」は、平面視において、スピンベース21の外方の位置であり、具体的には、カップ8の外方の位置であってもよい。
第2移動ノズル12は、鉛直方向への移動によって、基板Wの上面に接近したり、基板Wの上面から上方に退避したりする。第2ノズル移動ユニット16は、たとえば、鉛直方向に沿う回動軸と、回動軸に結合されて水平に延びるアームと、アームを駆動するアーム駆動機構とを含む。アーム駆動機構は、回動軸を鉛直な回動軸線まわりに回動させることによってアームを揺動させ、回動軸を鉛直方向に沿って昇降させることによって、アームを上下動させる。第2移動ノズル12はアームに固定され得る。アームの揺動および昇降に応じて、第2移動ノズル12が水平方向および垂直方向に移動する。
第1移動ノズル11は、この実施形態では、有機溶剤を吐出する有機溶剤ノズルとしての機能と、窒素ガス等の不活性ガスを吐出するガスノズルとしての機能とを有する。第1移動ノズル11には、有機溶剤供給管35および不活性ガス供給管36が連結している。有機溶剤供給管35には、その流路を開閉する有機溶剤バルブ37が介装されている。不活性ガス供給管36には、その流路を開閉する不活性ガスバルブ38が介装されている。有機溶剤供給管35には、有機溶剤供給源から、イソプロピルアルコール(IPA)等の有機溶剤が供給される。不活性ガス供給管36には、不活性ガス供給源から、窒素ガス(N2)等の不活性ガスが供給される。
第2移動ノズル12は、この実施形態では、酸、アルカリ等の薬液を供給する薬液ノズルとしての機能と、窒素ガス等の不活性ガスを吐出するガスノズルとしての機能とを有している。より具体的には、第2移動ノズル12は、液体と気体とを混合して吐出することができる二流体ノズルの形態を有していてもよい。二流体ノズルは、気体の供給を停止して液体を吐出すれば液体ノズルとして使用でき、液体の供給を停止して気体を吐出すればガスノズルとして使用できる。
第2移動ノズル12には、薬液供給管41および不活性ガス供給管42が結合されている。薬液供給管41には、その流路を開閉する薬液バルブ43が介装されている。不活性ガス供給管42には、その流路を開閉する不活性ガスバルブ44と、不活性ガスの流量を可変する流量可変バルブ45とが介装されている。薬液供給管41には、薬液供給源から、酸、アルカリ等の薬液が供給されている。不活性ガス供給管42には、不活性ガス供給源から、窒素ガス(N2)等の不活性ガスが供給されている。
薬液の具体例は、エッチング液および洗浄液である。さらに具体的には、薬液は、フッ酸、SC1(アンモニア過酸化水素水混合液)、SC2(塩酸過酸化水素水混合液)、バッファードフッ酸(フッ酸とフッ化アンモニウムとの混合液)などであってもよい。
DIWノズル10は、この実施形態では、基板Wの上面の回転中心に向けてDIWを吐出可能な位置に固定されたノズルである。DIWノズル10には、DIW供給源から、DIW供給管46を介して、DIWが供給される。DIW供給管46には、その流路を開閉するためのDIWバルブ47が介装されている。DIWノズル10は固定ノズルである必要はなく、たとえば、水平方向に移動可能な移動ノズルであってもよい。
下面ノズル9は、中空の昇降軸30を挿通し、さらに、ヒータユニット6を貫通している。下面ノズル9は、基板Wの下面中央に臨む吐出口9aを上端に有している。下面ノズル9には、流体供給源から流体供給管48を介して処理流体が供給されている。供給される処理流体は、液体であってもよいし、気体であってもよい。流体供給管48には、その流路を開閉するための流体バルブ49が介装されている。
図3は、スピンチャック5およびヒータユニット6の平面図である。スピンチャック5のスピンベース21は、平面視において、回転軸線A1を中心とする円形であり、その直径は基板Wの直径よりも大きい。スピンベース21の周縁部には、間隔を空けて複数個(この実施形態では3個)のチャックピン20が配置されている。
ヒータユニット6は、円板状のホットプレートの形態を有しており、プレート本体60と、支持ピン61と、ヒータ62とを含む。プレート本体60は、平面視において、基板Wの外形とほぼ同形同大で、回転軸線A1を中心とする円形に構成されている。より正確には、プレート本体60は、基板Wの直径よりも僅かに小さい直径の円形の平面形状を有している。たとえば、基板Wの直径が300mmであり、プレート本体60の直径(とくに加熱面6aの直径)がそれよりも6mmだけ小さい294mmであってもよい。この場合、プレート本体60の半径は基板Wの半径よりも3mm小さい。
プレート本体60の上面は、水平面に沿う平面である。プレート本体60の上面に複数の支持ピン61(図2を併せて参照)が突出している。支持ピン61は、たとえば、それぞれ半球状であり、プレート本体60の上面から微小高さ(たとえば0.1mm)だけ突出している。したがって、基板Wが複数の支持ピン61に接触して支持されるとき、基板Wの下面はたとえば0.1mmの微小間隔を開けてプレート本体60の上面に対向する。このように基板Wをプレート本体60に近接した位置にて点で支持することにより、基板Wを効率的かつ均一に加熱し得る。
なお、複数の支持ピン61は必須ではない。支持ピン61を有していない場合には、基板Wをプレート本体60の上面に接触させることができる。ヒータユニット6の加熱面6aは、支持ピン61を有している場合には、プレート本体60の上面および支持ピン61の表面を含む。また、支持ピン61が備えられていない場合には、プレート本体60の上面が加熱面6aに相当する。以下では、支持ピン61が基板Wの下面に接している状態を、加熱面6aに基板Wの下面が接しているなどという場合がある。
ヒータ62は、プレート本体60に内蔵されている抵抗体であってもよい。図3には、複数の領域に分割されたヒータ62を示している。ヒータ62に通電することによって、加熱面6aが室温(たとえば20〜30℃。たとえば25℃)よりも高温に加熱される。具体的には、ヒータ62への通電によって、第1移動ノズル11から供給される有機溶剤の沸点よりも高温に加熱面6aを加熱することができる。図2に示すように、ヒータ62への給電線63は、昇降軸30内に通されている。そして、給電線63には、ヒータ62に電力を供給するヒータ通電ユニット64が接続されている。ヒータ通電ユニット64は、基板処理装置1の動作中、常時、通電されてもよい。
支持ピン61は、プレート本体60の上面にほぼ均等に配置されている。プレート本体60の外周端よりも外方に、チャックピン20が配置されている。チャックピン20の全体がプレート本体60の外周端よりも外方に配置されている必要はなく、ヒータユニット6の上下動範囲に対向する部分がプレート本体60の外周端よりも外方に位置していればよい。
図4は、チャックピン20の構造例を説明するための斜視図である。また、図5は、チャックピン20の平面図である。図5中、(a)は閉状態を示しており、(b)は開状態を示している。
チャックピン20は、ベース部50と、鉛直方向に延びたシャフト部53と、シャフト部53の上端に設けられたベース部50と、シャフト部53の下端に設けられた回動支持部54とを含む。ベース部50は、把持部51と、支持部52とを含む。回動支持部54は、鉛直方向に沿うチャック回動軸線55まわりに回動可能にスピンベース21に結合されている。シャフト部53は、チャック回動軸線55から離れた位置にオフセットされて、回動支持部54に結合されている。より具体的には、シャフト部53はチャック回動軸線55よりも、回転軸線A1から離れた位置に配置されている。したがって、チャックピン20がチャック回動軸線55まわりに回動されると、ベース部50は、その全体が基板Wの周端面に沿って移動しながら、チャック回動軸線55まわりに回動する。回動支持部54は、スピンベース21の内部に設けられたリンク機構26(図2参照)に結合されている。このリンク機構26からの駆動力によって、回動支持部54は、チャック回動軸線55まわりに所定角度範囲で往復回動する。なお、基板Wの周端面とは、基板Wの外周面であり、基板Wの表面のうち主面(最も面積が大きい面)を除いた径方向外方を向く面である。
ベース部50は、平面視において、くさび形に形成されている。ベース部50の上面には、チャックピン20の開状態で基板Wの周縁部下面に当接して基板Wを下方から支持する支持面52aが設けられている。換言すれば、ベース部50は支持面52aを上面とする支持部52を有している。把持部51は、ベース部50の上面において、支持部52とは別の位置で上方に突出している。把持部51は、基板Wの周端面に対向するようにV字状に開いた保持溝51aを有している。
回動支持部54が図5(b)に示す開状態からチャック回動軸線55まわりに時計まわり方向に回動されるとき、把持部51は基板Wの周端面に接近し、支持部52は基板Wの回転中心から離反する。また、回動支持部54が図5(a)に示す閉状態からチャック回動軸線55まわりに反時計まわり方向に回動されるとき、把持部51は基板Wの周端面から離反し、支持部52は基板Wの回転中心に接近する。
図5(a)に示すチャックピン20の閉状態では、保持溝51aに基板Wの周端面が入り込む。このとき、基板Wの下面は、支持面52aから微小距離だけ上方に離間した高さに位置する。図5Bに示すチャックピン20の開状態では、保持溝51aから基板Wの周端面が脱していて、平面視において、把持部51は基板Wの周端面よりも外方に位置する。チャックピン20の開状態および閉状態のいずれにおいても、支持面52aは、少なくとも一部が基板Wの周縁部下面の下方に位置している。
チャックピン20が開状態のとき、チャックピン20は基板Wを支持部52で支持する。その開状態からチャックピン20を閉状態に切り換えると、断面V字状の保持溝51aに案内されてせり上がりながら基板Wの周端面が保持溝51a内へと案内され、保持溝51aの上下の傾斜面によって基板Wが挟持された状態に至る。その状態からチャックピン20を開状態に切り換えると、基板Wの周端面が保持溝51aの下側傾斜面に案内されながら滑り降り、基板Wの周縁部下面が支持面52aに当接する。
図5に示すように、ベース部50は、平面視において、ヒータユニット6のプレート本体60に対向する縁部が、プレート本体60の周縁形状に倣っている。すなわち、支持部52は、平面視において、プレート本体60よりも回転中心に対して外方に位置する側面52bを有している。このため、基板Wよりも若干小さい円形の加熱面6aを有するプレート本体60は、ヒータユニット6が上下動するときに、チャックピン20と干渉しない。この非干渉位置関係は、チャックピン20が閉状態および開状態のいずれにおいても保たれる。すなわち、チャックピン20が閉状態のときも開状態のときも、支持部52の側面52bは、平面視において、ヒータユニット6の加熱面6aから外方に離隔している。それによって、ヒータユニット6は、チャックピン20が閉状態か開状態かを問わず、加熱面6aを側面52bの内側を通過させながら、昇降できる。
基板Wの直径は、たとえば300mmであり、プレート本体60の上面の直径はたとえば294mmである。したがって、加熱面6aは、基板Wの下面の中央領域および周縁領域を含むほぼ全域に対向している。チャックピン20の閉状態および開状態のいずれにおいても、加熱面6aの外周縁の外側に所定の微小間隔(たとえば2mm)以上の間隔を確保した状態で、支持部52が配置される。
把持部51は、チャックピン20の閉状態において、その内側縁が、プレート本体60の外周縁の外側に所定の微小間隔(たとえば2mm)以上の間隔を確保した状態で位置するように構成されている。したがって、ヒータユニット6は、チャックピン20の閉状態および開状態のいずれにおいても、加熱面6aを把持部51の内側で上下させて、基板Wの下面に接触するまで上昇させることができる。
チャック回動軸線55は、平面視において、回転軸線A1(図2および図3参照)を中心とし、加熱面6aの半径よりも小さな半径の円周上に位置している。
<周縁当接部65>
スピンベース21の周縁部には、その周縁に沿って等間隔を空けて複数個(ここでは、3個)の周縁当接部65が配置されている。ここでは、チャックピン20と周縁当接部65とが、スピンベース21の周縁部に沿って交互に配置されている。また、周縁当接部65各々は、プレート本体60の外周端よりも外方に配置されている。ただし、周縁当接部65の全体がプレート本体60よりも外方に配置されている必要はない。周縁当接部65のうち、上下動するプレート本体60の外周面に対向する部分(ここでは、シャフト部66)が、プレート本体60の外周端よりも外方に位置していればよい。
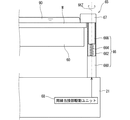
図6は、周縁当接部65の概略平面図である。図6(a)は開状態を示しており、図6(b)は閉状態を示している。図7は、周縁当接部65の図解的な側面図である。
周縁当接部65は、鉛直方向に延びたシャフト部66と、水平方向に延びた接触部67とを備えている。シャフト部66は、ベース部660、筒状部662、ばね部664(弾性部材)および連結部666を備えている。ベース部660は、円柱状に形成された部材であり、鉛直方向に沿う周縁当接部回動軸線66Zまわりに回動可能にスピンベース21に結合されている。筒状部662は、ベース部660の上端部に取り付けられている。筒状部662は、円筒状に形成されている。ここでは、ベース部660および筒状部662の外形を同一半径の円形状としているが、これは必須ではない。
筒状部662の内部に、ばね部664および連結部666が収容されている。ばね部664は、下端部がベース部660に固定されており、上端部が連結部666に固定されている。連結部666は、筒状部662の内側に、上下移動可能に挿通されている。連結部666上端部には、接触部67の一端寄りの部分が取り付けられている。
なお、筒状部662、ばね部664および連結部666を備えていることは必須ではない。たとえば、ベース部660を鉛直方向上方に延ばし、その先端に接触部67が取り付けられていてもよい。
周縁当接部65各々のベース部660は、周縁当接部駆動ユニット68に連結されている。この周縁当接部駆動ユニット68の駆動力によって、ベース部660が周縁当接部回動軸線66Zまわりに所定の回転角度範囲で往復回動する。周縁当接部駆動ユニット68は、たとえば、スピンベース21の内部に設けられたリンク機構と、スピンベース21の外側に配置された駆動源とを含む。駆動源は、たとえば、ボールねじ機構と、そのボールネジ機構に駆動力を与える電動モータとを含む。
周縁当接部駆動ユニット68により、周縁当接部65を回動駆動すると、接触部67が周縁当接部回動軸線66Zまわりに回動する。図6(a)に示すように、周縁当接部65が開状態のときには、接触部67全体が基板Wよりも外方の位置(離間位置)に配された状態となる。そして、図6(b)に示すように、周縁当接部65が閉状態のときには、接触部67の先端部が基板Wの周縁部に対して鉛直方向に重なる位置(周縁接触位置)に配された状態となる。周縁当接部65を離間位置に待避させることにより、チャックピン20に対して基板Wを搬入または搬出する際に、周縁当接部65の接触部67が基板Wに干渉することを抑制できる。
接触部67は、弾性変形可能な構造を有していてもよい。たとえば、接触部67の全部または基板Wに当接する下部のみを弾性材料により形成するとよい。弾性材料は耐熱性および耐薬性を有する例えばPTFE(polytetrafluoroethylene)などのフッ素樹脂が考えられる。このように接触部67を弾性変形可能に構成することによって、接触部67を基板Wの周縁部に柔軟に接触させることができる。これにより、基板Wの周縁部に与えられる衝撃を軽減できるため、基板Wの周縁部が破損することを有効に抑制できる。
図7に示すように、この実施形態では、昇降ユニット7によりヒータユニット6のプレート本体60が上昇することで、基板Wがチャックピン20によって保持されるときの位置(保持位置:図2参照)よりも上側の位置(上位置)に移動する。周縁当接部65各々は、この上位置に配された基板Wの周縁部の上面を下方に押圧する。
バネ部664が自然長のとき、接触部67の下面の高さは、ヒータユニット6に支持されて上位置に配される基板Wの上面よりも低い位置とされる。このため、接触部67が上位置に配された基板Wの周縁部に当接する際、ばね部664が鉛直方向に伸びる弾性変形によって、接触部67を基板Wの周縁部に柔軟に接触させることができる。これにより、基板Wの周縁部に与えられる衝撃を軽減できる。また、接触部67が基板Wの周縁部に当接している間、接触部67が基板Wの周縁部から上向きの力を受けることにより、バネ部664が伸張し、接触部67および連結部666が通常時よりも上側に配置される。このとき、バネ部664に蓄えられた弾性力によって、接触部67が適度な力で基板Wの周縁部を下方に押圧する。このため、基板Wの周縁部を破損させずに、基板Wの凹状の反り(上側への反り)を抑制できる。
図8は、第1移動ノズル11の構成例を説明するための模式的な縦断面図である。第1移動ノズル11は、有機溶剤ノズル71を備えている。有機溶剤ノズル71は、鉛直方向に沿った直管で構成されている。有機溶剤ノズル71に、有機溶剤供給管35が結合されている。
有機溶剤ノズル71に、基板Wの上方を不活性ガス雰囲気で覆うためのガスノズル72が結合されている。ガスノズル72は、下端にフランジ部73を有する円筒状のノズル本体74を有している。フランジ部73の側面である外周面には、上側気体吐出口75および下側気体吐出口76が、それぞれ環状に外方に向けて開口している。上側気体吐出口75および下側気体吐出口76は、上下に間隔を空けて配置されている。ノズル本体74の下面には、中心気体吐出口77が配置されている。
ノズル本体74には、不活性ガス供給管36から不活性ガスが供給される気体導入口78,79が形成されている。気体導入口78,79に対して、個別の不活性ガス供給管が結合されてもよい。ノズル本体74内には、気体導入口78と上側気体吐出口75および下側気体吐出口76とを接続する筒状の気体流路81が形成されている。また、ノズル本体74内には、気体導入口79に連通する筒状の気体流路82が有機溶剤ノズル71のまわりに形成されている。気体流路82の下方にはバッファ空間83が連通している。バッファ空間83は、さらに、パンチングプレート84を介して、その下方の空間85に連通している。この空間85が中心気体吐出口77に開放している。
気体導入口78から導入された不活性ガスは、気体流路81を介して上側気体吐出口75および下側気体吐出口76に供給され、これらの気体吐出口75,76から放射状に吐出される。これにより、上下方向に重なる2つの放射状気流が基板Wの上方に形成される。一方、気体導入口79から導入された不活性ガスは、気体流路82を介してバッファ空間83に蓄えられ、さらにパンチングプレート84を通って拡散された後に、空間85を通って中心気体吐出口77から基板Wの上面に向けて下方に吐出される。この不活性ガスは、基板Wの上面にぶつかって方向を変え、放射方向の不活性ガス流を基板Wの上方に形成する。
したがって、中心気体吐出口77から吐出される不活性ガスが形成する放射状気流と、気体吐出口75,76からの吐出される二層の放射状気流とを合わせて、三層の放射状気流が基板Wの上方に形成されることになる。この三層の放射状気流によって、基板Wの上面が保護される。とくに、後述するとおり、基板Wを高速回転するときに、三層の放射状気流によって基板Wの上面が保護されることにより、液滴やミストが基板Wの表面に付着することを回避できる。
有機溶剤ノズル71は、気体流路82、バッファ空間83およびパンチングプレート84を貫通して上下方向に延びている。有機溶剤ノズル71の下端の吐出口71aは、パンチングプレート84の下方に位置しており、基板Wの上面に向けて鉛直上方から有機溶剤を吐出する。
図9は、基板処理装置1の主要部の電気的構成を説明するためのブロック図である。制御ユニット3は、マイクロコンピュータを備えており、所定の制御プログラムに従って、基板処理装置1に備えられた制御対象を制御する。特に、制御ユニット3は、搬送ロボットIR,CR、スピンチャック5を回転駆動する電動モータ23、第1ノズル移動ユニット15、第2ノズル移動ユニット16、ヒータ通電ユニット64、ヒータユニット6を昇降する昇降ユニット7、チャックピン駆動ユニット25、周縁当接部駆動ユニット68、バルブ類37,38,43,44,45,47,49などの動作を制御する。
図10は、基板処理装置1による基板処理の一例を説明するための流れ図である。未処理の基板Wは、搬送ロボットIR,CRによってキャリヤCから処理ユニット2に搬入され、スピンチャック5に渡される(ステップS1)。このとき、制御ユニット3は、ヒータユニット6を下位置に配置するように昇降ユニット7を制御する。また、制御ユニット3は、チャックピン20が開状態になるようにチャックピン駆動ユニット25を制御する。また、制御ユニット3は、周縁当接部65を開状態としておく。その状態で、搬送ロボットCRは、基板Wをスピンチャック5に渡す。基板Wは、開状態のチャックピン20の支持部52(支持面52a)に載置される。その後、制御ユニット3は、チャックピン駆動ユニット25を制御して、チャックピン20を閉状態とする。それにより、複数のチャックピン20の把持部51によって基板Wが把持される。
搬送ロボットCRが処理ユニット2外に退避した後、薬液処理が実行される(ステップS2)。詳細には、制御ユニット3は、電動モータ23を駆動してスピンベース21を所定の薬液回転速度で回転させる。その一方で、制御ユニット3は、第2ノズル移動ユニット16を制御して、第2移動ノズル12を基板Wの上方の薬液処理位置に配置する。薬液処理位置は、第2移動ノズル12から吐出される薬液が基板Wの上面の回転中心に着液する位置であってもよい。そして、制御ユニット3は、薬液バルブ43を開く。それにより、回転状態の基板Wの上面に向けて、第2移動ノズル12から薬液が供給される。供給された薬液は遠心力によって基板Wの全面に行き渡る。
一定時間の薬液処理の後、基板W上の薬液をDIWに置換することにより、基板W上から薬液を排除するためのDIWリンス処理が実行される(ステップS3)。具体的には、制御ユニット3は、薬液バルブ43を閉じ、代わって、DIWバルブ47を開く。それにより、回転状態の基板Wの上面に向けてDIWノズル10からDIWが供給される。供給されたDIWは遠心力によって基板Wの全面に行き渡る。このDIWによって基板W上の薬液が洗い流される。この間に、制御ユニット3は、第2ノズル移動ユニット16を制御して、第2移動ノズル12を基板Wの上方からカップ8の側方へと退避させる。
一定時間のDIWリンス処理の後、基板W上のDIWを、より表面張力の低い処理液(低表面張力液)である有機溶剤に置換する有機溶剤処理が実行される(ステップS4)。詳細には、制御ユニット3は、第1ノズル移動ユニット15を制御して、第1移動ノズル11を基板Wの上方の有機溶剤リンス位置に移動させる。有機溶剤リンス位置は、第1移動ノズル11に備えられた有機溶剤ノズル71(図6参照)から吐出される有機溶剤(たとえばIPA)が基板Wの上面の回転中心に着液する位置であってもよい。そして、制御ユニット3は、DIWバルブ47を閉じて、有機溶剤バルブ37を開く。それにより、回転状態の基板Wの上面に向けて、第1移動ノズル11(有機溶剤ノズル71)から有機溶剤(液体)が供給される。供給された有機溶剤は遠心力によって基板Wの全面に行き渡り、基板W上のDIWを置換する。
有機溶剤処理において、制御ユニット3は、昇降ユニット7を制御して、ヒータユニット6を基板Wに向けて上昇させ、それによって、基板Wを加熱する。また、制御ユニット3は、スピンチャック5の回転を減速して基板Wの回転を停止し、かつ有機溶剤バルブ37を閉じて有機溶剤の供給を停止する。それにより、静止状態の基板W上に有機溶剤液膜が支持されたパドル状態とされる。基板Wの加熱によって、基板Wの上面に接している有機溶剤の一部が蒸発し、それによって、有機溶剤液膜と基板Wの上面との間に気相層が形成される。その気相層に支持された状態の有機溶剤液膜が排除される。
有機溶剤液膜の排除に際して、制御ユニット3は、第1ノズル移動ユニット15を制御して、第1移動ノズル11を基板Wの上方からカップ8の側方へと退避させる。そして、制御ユニット3は、第2ノズル移動ユニット16を制御して、第2移動ノズル12を基板Wの上方の気体吐出位置に配置する。気体吐出位置は、第2移動ノズル12から吐出される不活性ガス流が基板Wの上面の回転中心に向けられる位置であってもよい。そして、制御ユニット3は、不活性ガスバルブ44を開いて、基板W上の有機溶剤液膜に向けて不活性ガスを吐出する。これにより、不活性ガスの吐出を受ける位置、すなわち、基板Wの中央において、有機溶剤液膜が不活性ガスによって排除され、有機溶剤液膜の中央に、基板Wの表面を露出させる穴が空けられる。この穴を広げることによって、基板W上の有機溶剤が基板W外へと排出される。
こうして、有機溶剤処理を終えた後、制御ユニット3は、不活性ガスバルブ44を閉じ、第2移動ノズル12を退避させた後、電動モータ23を制御して、基板Wを乾燥回転速度で高速回転させる。それにより、基板W上の液成分を遠心力によって振り切るための乾燥処理が行われる(ステップS5:スピンドライ)。
その後、制御ユニット3は、電動モータ23を制御してスピンチャック5の回転を停止させる。また、昇降ユニット7を制御して、ヒータユニット6を下位置に制御する。さらに、制御ユニット3は、チャックピン駆動ユニット25を制御して、チャックピン20を開位置に制御する。これにより、基板Wは、チャックピン20の把持部51に把持された状態から、支持部52に載置された状態となる。その後、搬送ロボットCRが、処理ユニット2に進入して、スピンチャック5から処理済みの基板Wをすくい取って、処理ユニット2外へと搬出する(S6)。その基板Wは、搬送ロボットCRから搬送ロボットIRへと渡され、搬送ロボットIRによって、キャリヤCに収納される。
図11は、有機溶剤処理(図10のステップS4)の詳細を説明するためのタイムチャートである。また、図12〜図15は、有機溶剤処理の各ステップの様子を説明するための図解的な断面図である。図16は、乾燥処理(図10のステップS5)の様子を説明するための図解的な断面図である。
有機溶剤処理は、順に、有機溶剤リンスステップT1と、有機溶剤パドルステップT2と、持ち上げパドルステップT3と、ノズル入れ替えステップT4と、穴開けステップT5と、穴広げステップT6と、外周液落としステップT7とを含む。
有機溶剤リンスステップT1は、基板Wを回転しながら、基板Wの上面に有機溶剤を供給するステップ(処理液供給工程、有機溶剤供給工程)である。たとえば、図12(a)に示すように、基板Wの上面に有機溶剤ノズル71から有機溶剤が供給される。供給された有機溶剤は、遠心力を受けて基板Wの上面の中心から外方へと向かい、基板Wの上面を覆う液膜90を形成する。液膜90が基板Wの上面全域を覆うことにより、DIWリンス処理(図10のステップS3)で基板Wの上面に供給されたDIW(別の処理液)が全て有機溶剤に置換される。
有機溶剤リンスステップT1の期間中、基板Wは、スピンチャック5によって、有機溶剤リンス処理速度(液供給速度。たとえば300rpm程度)で回転させられる(液供給速度回転工程)。第1移動ノズル11(有機溶剤ノズル71)は、基板Wの回転中心の上方に配置される。有機溶剤バルブ37は開状態とされ、したがって、有機溶剤ノズル71から吐出される有機溶剤(たとえば、イソプロピルアルコール(IPA))が基板Wの上面の回転中心に向けて上方から供給される。チャックピン20は閉状態とされ、基板Wは把持部51によって把持され、スピンチャック5とともに回転する。ヒータユニット6は、下位置よりも上方に位置制御され、基板Wの下面から所定距離(たとえば2mm)だけ下方に離隔した離隔位置にその加熱面6aが配置される。これにより、基板Wは、加熱面6aからの輻射熱によって予熱される(基板予熱工程)。ヒータユニット6の加熱面の温度は、たとえば150℃程度であり、面内で均一である。第2移動ノズル12は、カップ8の側方のホーム位置に退避している。薬液バルブ43および不活性ガスバルブ38,44は閉状態に制御される。したがって、第2移動ノズル12は、不活性ガス(たとえば窒素ガス)を吐出しない。
有機溶剤パドルステップT2は、図12(b)に示すように、基板Wの回転を減速して停止させ、基板Wの表面に有機溶剤の厚い液膜90を形成して保持するステップである。
基板Wの回転は、この例では、有機溶剤リンス処理速度から段階的に減速される(減速工程、漸次減速工程、段階的減速工程)。より具体的には、基板Wの回転速度は、300rpmから、50rpmに減速されて所定時間(たとえば10秒)維持され、その後、10rpmに減速されて所定時間(たとえば10秒)維持され、その後、0rpm(停止)に減速されて所定時間(たとえば10秒)維持される。一方、有機溶剤ノズル71は、回転軸線A1上に保持され、引き続き、基板Wの上面の回転中心に向けて有機溶剤を吐出する。有機溶剤ノズル71からの有機溶剤の吐出は、有機溶剤パドルステップT2の全期間において継続される。すなわち、基板Wが停止しても、有機溶剤の吐出が継続される。このように、基板Wの回転の減速から停止に至る全期間において有機溶剤の供給が継続されることにより、基板Wの上面の至るところで処理液が失われることがない。また、基板Wの回転が停止した後も有機溶剤の供給が継続されることにより、基板Wの上面に厚い液膜90を形成できる。
ヒータユニット6の位置は、有機溶剤リンスステップのときと同じ位置であり、加熱面6aが基板Wの下面から所定距離(たとえば2mm)だけ下方に離隔した離隔位置である。これにより、基板Wは、加熱面6aからの輻射熱によって予熱される(基板予熱工程)。チャックピン20は、基板Wの回転が停止した後、その停止状態が保持されている間に、閉状態から開状態へと切り換わる。それにより、基板Wの周縁部下面がチャックピン20の支持部52によって下方から支持された状態となり、把持部51が基板Wの上面周縁部から離れるので、基板Wの上面全域が開放される。第2移動ノズル12は、ホーム位置のままである。
また、制御ユニット3は、チャックピン20を閉状態から開状態へと切り換えるタイミングで、周縁当接部65を開状態から閉状態へ切り換える。ただし、この周縁当接部65の切り換えのタイミングは、基板搬入処理(図10のステップS1)が完了した後から、持ち上げパドルステップT3が開始される前までの期間内で任意に変更され得る。
持ち上げパドルステップT3は、図12(c)に示すように、ヒータユニット6で基板Wを持ち上げた状態で、すなわち、加熱面6aを基板Wの下面に接触させた状態で、基板Wを加熱しながら、基板Wの上面に有機溶剤液膜90を保持するステップである。
ヒータユニット6が離隔位置から上位置まで上昇させられて、所定時間(たとえば10秒間)保持される。ヒータユニット6が上位置まで上昇させられる過程で、チャックピン20の支持部52から加熱面6aに基板Wが渡され、加熱面6a(より具体的には支持ピン61。図2参照)によって基板Wが支持される(ヒータユニット接近工程、ヒータユニット接触工程)。そして、図13に示すように、ヒータユニット6が上位置まで上昇することで、基板Wが所定の上位置(図8参照)に配されると、閉状態の周縁当接部65各々が基板Wの周縁部に接触する(周縁部接触工程T30)。
第1移動ノズル11(有機溶剤ノズル71)からの有機溶剤の吐出は、持ち上げパドルステップT3の途中まで継続される。したがって、ヒータユニット6の加熱面6aが基板Wの下面に接触し、加熱面6aからの熱伝導による基板Wの急加熱が開始され、基板Wに与えられる熱量が増加(熱量増加工程)するときには、有機溶剤の供給は継続している。それにより、基板Wの急激な昇温に伴う有機溶剤の蒸発によって有機溶剤の液膜90に不特定の位置で穴があくことを回避している。有機溶剤の供給は、ヒータユニット6の加熱面6aが基板Wの下面に接触した後(熱量増加工程の後)、所定時間の経過の後に停止される(供給停止工程)。すなわち、制御ユニット3は、有機溶剤バルブ37を閉じて、有機溶剤ノズル71からの有機溶剤の吐出を停止させる。
スピンチャック5の回転は停止状態であり、第2移動ノズル12はホーム位置にあり、不活性ガスバルブ44は閉状態である。第1移動ノズル11(有機溶剤ノズル71)は基板Wの回転中心の上方に位置している。
有機溶剤の供給が停止された後、所定時間が経過するまで、ヒータユニット6は上位置に保持される。基板Wに供給された有機溶剤は、中心に供給される新たな有機溶剤によって外周側へと押しやられ、その過程で、ヒータユニット6によって加熱された基板Wの上面からの熱で加熱されて昇温していく。有機溶剤の供給を継続している期間には、基板Wの中央領域の有機溶剤の温度は比較的低い。そこで、有機溶剤の供給を停止した後、所定の短時間だけヒータユニット6の接触状態を保持することによって、基板Wの中央領域における有機溶剤を昇温できる。それにより、基板Wの上面に支持された有機溶剤の液膜90の温度を均一化できる。
基板Wの上面からの熱を受けた有機溶剤液膜90では、基板Wの上面との界面において蒸発が生じる。それによって、基板Wの上面と有機溶剤液膜90との間に、有機溶剤の気体からなる気相層が生じる。したがって、有機溶剤液膜90は、基板Wの上面の全域において、気相層上に支持された状態となる(気相層形成工程)。
ノズル入れ替えステップT4は、図14(a)に示すように、第1移動ノズル11を回転軸線A1上から退避させ、代わって、第2移動ノズル12を回転中心上に配置するステップである。
具体的には、有機溶剤の供給を停止した後に、第1移動ノズル11は、カップ8の側方に設定したホーム位置に退避させられる。その後、第2移動ノズル12が、ホーム位置から回転軸線A1上の中心位置に移動させられる。ノズル入れ替えステップT4の期間中、ヒータユニット6は上位置から若干下に下降させられる。それにより、基板Wは、ヒータユニット6からチャックピン20の支持部52に渡され、加熱面6aは、基板Wの下面から所定の微小距離だけ間隔を空けた非接触状態で基板Wの下面に対向する。これにより、基板Wの加熱は加熱面6aからの輻射熱による加熱に切り換わり、基板Wに与えられる熱量が減少する(熱量減少工程)。これによって、ノズルを入れ替えている間に基板Wが過熱することを回避し、蒸発によって有機溶剤液膜90に亀裂(とくに基板Wの外周領域での亀裂)が生じることを回避している。
穴開けステップT5は、図14(b)に示すように、第2移動ノズル12から基板Wの中心に向けて小流量(第1流量。たとえば3リットル/分)で不活性ガス(たとえば窒素ガス)を吹き付け、有機溶剤液膜90の中央部に小さな穴91を開けて基板Wの上面の中央部を露出させるステップである(穴開け工程)。基板Wの回転は停止状態のままであり、したがって、静止状態の基板W上の液膜90に対して穴開けステップが行われる。
穴開けステップT5の期間中、ヒータユニット6は、上位置に移動することによって基板Wを持ち上げ、基板Wに接触しながら加熱する。穴開けステップT5の間、閉状態の周縁当接部65各々が基板Wの周縁部に接触した状態となる。
制御ユニット3は、不活性ガスバルブ44を開き、かつ流量可変バルブ45の開度を制御することによって、第2移動ノズル12から小流量で不活性ガスを吐出させる。
有機溶剤液膜90の穴開けの直後から(すなわち、ほぼ同時に)、基板Wの急加熱が始まる(再熱量増加工程)。それにより、不活性ガスによる穴開けによって液膜90の外方への移動が始まると、基板Wの加熱が速やかに(ほぼ同時に)開始され、それによって、液膜90は止まることなく基板Wの外方へと移動していく。
より具体的には、穴開けされて液膜90がなくなった中央領域では、液膜90が存在しているその周囲の領域に比較して、熱容量が小さくなるために基板Wの温度が速やかに上昇する。また、基板Wにおける液膜90が残存する部分は、液膜90の沸点以上に昇温し難い。このため、穴91の周縁において基板W内に大きな温度勾配が生じる。すなわち、穴91の周縁の内側が高温で、その外側が低温になる。この温度勾配によって、図14(c)に示すように、気相層上に支持されている有機溶剤液膜90が低温側、すなわち、外方に向かって移動を始め、それによって、有機溶剤液膜90の中央の穴91が拡大していく。
こうして、基板Wの加熱により生じる温度勾配を利用して、基板W上の有機溶剤液膜90が基板W外へと排除される(加熱排除工程、液膜移動工程)。より具体的には、基板Wの上面において、パターンが形成された領域内の液膜90は、温度勾配による有機溶剤の移動によって排除される。
仮に、不活性ガスの吹き付けによって基板Wの回転中心に穴91を形成した後に、長い時間を空けてヒータユニット6を基板Wに接触させた場合、その間に、穴91の拡大が停止する。このとき、液膜90の内周縁は、内方に向かったり外方に向かったりする平衡状態となる。このとき、基板Wの表面に形成されたパターン内に有機溶剤の液面が入り込み、表面張力によるパターン倒壊の原因となるおそれがある。そこで、この実施形態では、不活性ガスによる穴開けとほぼ同時にヒータユニット6を基板Wの下面に接触させて、基板Wに与える熱量を瞬時に増加させている。
穴広げステップT6は、図15(a)に示すように、第2移動ノズル12から吐出される不活性ガスの流量を増量し、大流量(第2流量。たとえば30リットル/分)の不活性ガスを基板Wの中心に吹き付けて、有機溶剤液膜90の中央の穴91を不活性ガスによってさらに広げるステップである(気体排除工程、液膜移動工程)。すなわち、制御ユニット3は、流量可変バルブ45を制御して、第2移動ノズル12に供給される不活性ガスの流量を増加させる。それにより、基板Wの上面の外周領域まで移動した液膜90がさらに基板W外へと押しやられる。基板Wの回転は停止状態に保持される。
具体的には、温度勾配によって穴91が広がっていく過程で、さらに不活性ガスの流量を増加させることで、液膜90の移動が停止することを回避して、液膜90の基板W外方に向かう移動を継続させることができる。温度勾配を利用する有機溶剤液膜90の移動だけでは、基板Wの上面の周縁領域で液膜90の移動が止まってしまうおそれがある。そこで、不活性ガスの流量を増加させることで、液膜90の移動をアシストでき、それによって、基板Wの上面の全域から有機溶剤液膜90を排除できる。不活性ガスを吐出する第2移動ノズル12、および、吐出量を制御する制御ユニット3は、チャックユニット20を解除状態とし、ヒータプレート6が下面に当接している基板Wの上面に形成された液膜90を基板Wの中央から周縁に向けて排除する液膜排除部の一例である。
なお、穴開けステップT5および孔広げステップT6は、上記基板W上の温度勾配により、基板Wの周縁部が中央部に対して反り上がることで、基板Wの上側が窪むように反るおそれがある。これに対して、穴開けステップT5および孔広げステップT6の不活性ガスの流量増加直後の間、閉状態の周縁当接部65各々がヒータユニット6に支持された基板Wの周縁部に接触している(図14(b)および図15(a)参照)。このため、温度勾配によって生じうる基板Wの周縁部の反りが、周縁当接部65各々に抑制される。つまり、周縁当接部65は、反り抑制部の一例である。基板Wの反りが抑制されることにより、基板Wの周縁部がヒータユニット6から離れることを抑制できるため、その周縁部の温度低下を抑制できる。これにより、周縁部におけるIPAの乾燥不良を抑制することができる。
孔広げステップT6では、不活性ガスの流量を増加させた後に、ヒータユニット6が下降させられ、加熱面6aからチャックピン20の支持部52に基板Wが渡される。その後、大流量での不活性ガス吐出が終了するまでに、チャックピン20が閉状態とされ、その把持部51によって基板Wが把持される。図11に示したタイムチャートの例では、ヒータユニット6は、チャックピン20に基板Wが渡された後、基板Wの下面に微小距離を隔てて対向する非接触加熱位置に短時間保持され、その後、さらに下降されて、基板Wの下面に所定距離だけ隔てて対向する離隔位置に配置される。
外周液落としステップT7は、図15(b)に示すように、基板Wを回転させることによって、基板Wの外周部に残る有機溶剤液膜を振り落とすステップである。詳細には、チャックピン20で基板Wが把持された後、第2移動ノズル12への不活性ガスの供給が停止され、第2移動ノズル12がホーム位置へと退避する。それとともに、スピンチャック5が低速の外周振り落とし速度で回転させられる。具体的には、たとえば30〜100rpmでスピンチャック5とともに基板Wが回転させられる。それにより、大流量の不活性ガスの供給によっても排除しきれずに基板Wの外周部(とくに周端面)に残る有機溶剤が振り落とされる。
温度差および大流量の不活性ガスの吹き付けによって、液膜90が外周部にまで移動した後であり、しかも、低速の外周振り落とし速度での回転であるので、遠心力によって液膜90が微小液滴に分裂することがなく、液塊の状態で基板Wから振り落とされる。また、基板Wの外周部には、製品に使用するための有効なパターンが形成されていない場合がほとんどであるので、たとえ液膜90の多少の分裂が生じても大きな問題ではない。
外周液落としステップT7に続けて、図16に示すように、スピンドライステップT8(乾燥処理。図10のステップS5)が実行される。具体的には、制御ユニット3は、第1移動ノズル11を、ホーム位置から回転軸線A1上に移動させる。さらに、制御ユニット3は、第1移動ノズル11を、基板Wの上面に接近した下位置に配置する。そして、制御ユニット3は、不活性ガスバルブ38を開く。それにより、第1移動ノズル11(ガスノズル72)は、三層の放射状不活性ガス流を基板Wの上方に形成する。その状態で、制御ユニット3は、スピンチャック5の回転を高速な乾燥回転速度(たとえば800rpm)まで加速される。これにより、遠心力によって、基板Wの表面の液成分を完全に振り切ることができる。基板Wの上面は放射状の不活性ガス流によって覆われているので、周囲に飛び散って跳ね返った液滴や周囲のミストが基板Wの上面に付着することを回避できる。
スピンドライステップT8の後は、スピンチャック5の回転が停止され、ヒータユニット6が下位置に下降させられる。また、不活性ガスバルブ38が閉じられて、ガスノズル72からの不活性ガスの吐出が停止される。そして、第1移動ノズル11は、ホーム位置に移動される。その後は、制御ユニット3は、チャックピン20を開状態とし、搬送ロボットCRに、処理済みの基板Wを処理ユニット2から搬出させる。
図11に示すように、この実施形態では、制御ユニット3は、穴広げステップT6におけるチャックピン20を閉状態に切り換えるタイミングで、周縁当接部65を閉状態から開状態へ切り換える。ただし、周縁当接部65の切り換えのタイミングは、穴広げステップT6にてヒータユニット6が下降することにより基板Wが下降し始めた後から、スピンドライステップT8完了後の搬送ロボットCRがチャックピン20から基板Wを搬出するよりも前までの期間内で、任意に変更され得る。
図17は、基板Wの温度差による有機溶剤液膜90の移動を説明するための図である。有機溶剤液膜90中の有機溶剤は、より低温の方に移動する性質を持つ。穴開けステップT5で有機溶剤液膜の中央に穴91が形成されることにより、図17(a)に示すように、基板W全面のうち、中央部に形成される穴91内の領域の温度が、穴91外の領域の温度よりも相対的に高くなる。それに応じて、穴91の近傍では有機溶剤液膜90の温度がその周囲よりも高くなる。これにより、有機溶剤液膜90中に温度差が生じるので、穴91の周縁部の有機溶剤が、基板Wの外方に向かって放射状に移動する。すると、図17(b)に示すように、気相層92上で、基板Wの周縁に向かう流れ94が生じ、有機溶剤液膜90の中央部の穴91が同心円状に広がる。
この温度差による有機溶剤の流れ94を利用した穴広げと並行して、不活性ガスの流量増大による穴広げステップT6が実行されるので、穴91は、途中で止まることなく、基板Wの外周縁まで広がる。それにより、途中で滞留を生じさせることなく、液膜90を基板W外に排除できる。
また、穴開けステップT5において、基板Wにおける中央側の部分と周縁側の部分とで温度差が発生すると、基板Wの周縁側が上側に反りやすくなる。基板Wに反りが発生すると、基板W上の有機溶剤液膜90を良好に除去することが困難となるおそれがある。これに対して、この実施形態では、穴開けステップT5の間、基板Wの周縁部における複数箇所の上面が、周縁当接部65各々に接触する。これにより、基板Wの周縁部の上側への反りが抑制されるため、基板Wの周縁部の温度低下を抑制できる。これにより、基板Wを均一に加熱できるため、有機溶剤液膜90の除去を良好に実施できる。
<2. 第2実施形態>
次に、第2実施形態について説明する。なお、以降の説明において、既に説明した要素と同様の機能を有する要素については、同じ符号またはアルファベット文字を追加した符号を付して、詳細な説明を省略する場合がある。
図18は、第2実施形態の周縁当接部65aの概略平面図である。図18(a)は開状態を示しており、図18(b)は閉状態を示している。また、図19は、周縁当接部65aの図解的な側面図である。
この実施形態では、スピンベース21の周縁部に、複数の周縁当接部65に代えて複数の周縁当接部65aが設けられている。周縁当接部65aは、鉛直方向に延びたシャフト部66aと、平面視において非円形状(ここでは、略卵型)の周端面接触部67aとを有している。周端面接触部67aは、シャフト部66aの上部に取り付けられている。シャフト部66aおよび周端面接触部67aは、周縁当接部駆動ユニット68により、鉛直方向に延びる周縁当接部回動軸線66Zまわりに回転する。この回転により、図18に示すように周縁当接部65が開状態と閉状態との間で切り換えられる。
図18(a)に示すように、周縁当接部65aが開状態のとき、周端面接触部67aはヒータユニット6およびヒータユニット6またはチャックピン20に支持されている基板Wよりも外方に配される。この状態では、各周縁当接部65aの周端面接触部67aのうち周縁当接部回動軸線66Zに相対的に近い側面部分が回転軸線A1に向けられている。
図18(b)および図19に示すように、周縁当接部65aが閉状態のとき、周端面接触部67aが、ヒータユニット6に支持されて上位置に配された基板Wの周端面に当接する。詳細には、基板Wがヒータユニット6に支持されて上位置まで移動させられた後に、周縁当接部駆動ユニット68がシャフト部66を所定角度(ここでは90度)だけ回転させる。これにより、各周縁当接部65aの周端面接触部67aのうち周縁当接部回動軸線66Zから相対的に離れた側面部分が、回転軸線A1に向けられるとともに、基板Wの周端面に当接させられる。周端面接触部67aが基板Wに接触する際、基板Wの周縁部は殆ど上下動しない。これにより、基板Wがヒータユニット6の加熱面6aから浮くことを抑制できる。
周端面接触部67aは、弾性変形可能な構造を有していてもよい。たとえば、周端面接触部67aの全体、あるいは、基板Wに当接させられる側面部分(閉状態で回転軸線A1側を向く部分)のみを弾性材料により形成してもよい。周端面接触部67aが弾性変形することによって、周端面接触部67aが基板Wの周端面に対して柔軟に接触できる。このため、基板Wの周縁部が破損することを抑制しつつ、基板Wの周縁部における反りの発生を抑制できる。
基板Wの周端面のうち、周縁当接部65aの周端面接触部67aに接触されている部分については、上下方向に移動することが抑制される。このため、基板Wにおいて、中央部と周縁部との温度差等が生じた場合にも、周縁当接部65aにより基板Wの周縁部が反ることを抑制できる。特に、周縁当接部65aの場合、基板Wの周端面が上方向だけでなく下方向に反ることも抑制できる。
さらに、周縁当接部65aの場合、基板Wのパターン形成面(上面または下面)に接触することがない。このため、基板Wのパターン形成面を清浄に保つことができる。また、基板Wに形成された有機溶剤液膜90が、基板Wの周縁部における周縁当接部65aとの接触部分から外方に流れ落ちる可能性はあるものの、その程度は、周縁当接部65の場合に比べて小さい。したがって、周縁当接部65に比べて、周縁当接部65aが有機溶剤液膜90の除去処理に与える影響を小さくできるため、より良好に基板Wから有機溶剤液膜90を除去し得る。
<3. 変形例>
以上、この発明の一実施形態について説明してきたが、この発明は、さらに他の形態で実施することもできる。この発明の範囲に含まれるいくつかの形態を以下に例示的に列挙する。
1.使用可能な有機溶剤は、IPAのほかにも、メタノール、エタノール、アセトン、HEF(ハイドルフルオロエーテル)を例示できる。これらは、いずれも水(DIW)よりも表面張力が小さい有機溶剤である。この発明は、有機溶剤以外の処理液にも適用可能である。たとえば、水などのリンス液を基板外に排除するためにこの発明を適用してもよい。リンス液としては、水のほかにも、炭酸水、電界イオン水、オゾン水、希釈濃度(たとえば、10〜100ppm程度)の塩酸水、還元水(水素水)などを例示できる。
2.穴開け工程に使用可能な気体としては、窒素ガスのほかにも、清浄空気その他の不活性ガスを採用できる。
3.前述の実施形態では、第1移動ノズル11に有機溶剤ノズル71が備えられる一方で、穴開け等のための不活性ガスの供給は第2移動ノズル12から行われている。しかし、たとえば、第1移動ノズル11に有機溶剤ノズル71とともに、基板Wの回転中心に向けて不活性ガスを吐出できるガスノズルを備え、このガスノズルから穴開けのための不活性ガス供給を行ってもよい。なお、前述のガスノズル72の中心気体吐出口77は、パンチングプレート84によって拡散された気体流を吐出するので、穴開けステップの実行には必ずしも適さない。より狭い領域に向けて気体を吐出できる形態のノズル、具体的には直管状ノズルや二流体ノズルなどのようなチューブノズルを穴開けステップの実行のために用いることが好ましい。
4.第1移動ノズル11に有機溶剤ノズル71とともに穴開けステップのためのガスノズルが備えられる場合には、ノズル入れ替えステップは省かれてもよい。ただし、この場合でも、穴開けステップのためにガスノズルから吐出された不活性ガスが液膜90に到達する瞬間には、ヒータユニット6は基板Wの下面から離隔させておくことが好ましい。
5.穴開けステップにおいて、室温(たとえば25℃)よりも高温の不活性ガスを用いてもよい。この場合には、不活性ガスが基板Wに到達したときの基板Wの上下面間の温度差を少なくできる。したがって、ヒータユニット6を基板Wの下面に接触させたままで、穴開けステップのための高温不活性ガス吐出を行ってもよい。不活性ガスの温度は、基板Wの温度に近いほど好ましい。
6.前述の実施形態では、有機溶剤パドルステップT2における基板Wの回転の漸次的減速が段階的に行われているが、連続的に回転を減速してもよい。たとえば、10秒以上かけて300rpmから0rpmまで回転速度を連続的(たとえば直線的)に減速すれば、液膜90が基板Wの上面全域を覆う状態を保持できる。
7.有機溶剤パドルステップT2において基板Wの回転を減速するときに、第1移動ノズル11から吐出される有機溶剤の流量を増加させてもよい(増流量減速工程)。この場合に、基板Wの回転の減速はステップ的に行われてもよいし、前述の実施形態のように、漸次的に行われてもよい。有機溶剤の供給流量を増加させることによって、基板Wの上面の外周領域における液切れが生じ難くなるので、基板Wの回転を速やかに減速して停止させることができる。これにより、短時間で基板Wの回転を停止できるので、生産性を向上できる。
8.前述の実施形態では、ヒータユニット6から基板Wに与えられる熱量を増減するために、ヒータユニット6と基板Wとの距離を変更している。しかし、ヒータユニット6と基板Wとの間の位置関係の変更に代えて、またはそれとともに、ヒータユニット6の出力を変化させることにより、基板Wに与える熱量を増減してもよい。
9.前述の実施形態では、気相層92を形成するときに、ヒータユニット6を基板Wの下面に接触させている。しかし、ヒータユニット6からの輻射熱によって気相層92を形成できるのであれば、ヒータユニット6を基板Wの下面から離隔させたままで、気相層92の形成のための基板加熱を行ってもよい。ただし、ヒータユニット6の加熱面6aを基板Wに接触させる方が、雰囲気温度の変化等の外乱の影響を抑制できるので、加熱の面内均一性を高めることができる。また、基板Wに対しては、有機溶剤の蒸発によって奪われる気化熱を補って気相層92を形成および保持できる熱量を与える必要がある。したがって、加熱面6aを基板Wに接触させることにより、基板Wを効率的、安定的かつ速やかに加熱できる。
10.処理対象の基板は、円形である必要はなく、矩形の基板であってもよい。
11.前述の実施形態では、有機溶剤パドルステップT2の途中から基板Wの回転を完全に停止して静止状態にしている。また、有機溶剤パドルステップT2に続く持ち上げパドルステップT3、ノズル入れ替えステップT4、および穴開けステップT5を通して、基板Wの静止状態を維持している。しかし、基板Wの上に有機溶剤の液膜を保持し続けることができるのであれば、有機溶剤パドルステップT2から穴開けステップT5までの期間の全部または一部の期間において基板を静止状態とせず、静止状態と同一視できる程度の低速(たとえば10rpm程度)で回転させるようにしてもよい。たとえば、穴開けステップT5において基板Wをこのような速度で回転させてもよい。
12.回転軸線A1周りにヒータユニット6を回転させるための電動モータ等からなる回転ユニットをさらに備えてもよい。この場合、ヒータユニット6を基板Wの回転に同期して回転させることができる。
13.上記実施形態では、複数の周縁当接部65,65aが接触する基板Wは、ヒータユニット6によって上位置に支持されている。ヒータユニット6で基板Wを支持する代わりに、スピンベース21の上面に対して突出/埋没する棒状のピン部材により基板Wを支持してもよい。
14.上記実施形態では、複数の周縁当接部65,65aがスピンベース21に取り付けられているが、これは必須ではない。たとえば、複数の周縁当接部65,65aがヒータユニット6のプレート本体60に設けてもよい。この場合、ヒータユニット6によって上位置に支持された状態の基板Wの周縁部に、プレート本体60に設けた周縁当接部を当接させるとよい。また、複数の周縁当接部65,65aがスピンベース21およびプレート本体60とは異なる部材に設けられてもよい。
15.上記実施形態では、周縁当接部65,65aが基板Wに当接するときの基板Wの位置は、ヒータユニット6によってチャックピン20で把持されるときの被把持位置よりも上側の上位置に限定されない。たとえば、周縁当接部が、この被把持位置と同じ高さ、もしくは、それよりも下側の位置の基板Wに当接する位置に設けられてもよい。
この変形例の場合、たとえば、接触部67の下端を、チャックピン20の把持部51と同じ高さかそれよりも下側に設けるとよい。そして、チャックピン20による把持が解除された解除状態の基板Wを、ヒータユニット6が上昇して被把持位置(またはそれよりも下側の位置)に支持するとともに、周縁当接部駆動ユニット68が接触部67を回転させて、この基板Wの周縁部に当接させるとよい。
16.第2実施形態の変形例として、チャックピン20を省略するとともに、チャックピン20の把持部51を、周縁当接部65aにおけるシャフト部66aに設けてもよい。この場合、シャフト部66aにおける周端面当接部67aよりも下側(スピンベース21側)の部分に、把持部51を設けるとよい。この場合、周縁当接部駆動ユニット68が、シャフト部66aを回転させることにより、ヒータユニット6に支持されて上位置にある基板Wの周端面に周端面接触部67を当接させる状態と、上位置よりも下側にある基板Wを把持部51で把持する状態との間で切り換えるとよい。
また、この変形例に関して、周端面当接部67aと同じ高さに把持部51を設けてもよい。この場合、ヒータユニット6が基板Wを把持部51に把持されるときの高さ位置(被把持位置)に支持しておき、周縁当接部駆動ユニット68が周端面当接部67aを回転させてこの基板Wの周端面に当接させるとよい。
この発明は詳細に説明されたが、上記の説明は、すべての局面において、例示であって、この発明がそれに限定されるものではない。例示されていない無数の変形例が、この発明の範囲から外れることなく想定され得るものと解される。上記各実施形態および各変形例で説明した各構成は、相互に矛盾しない限り適宜組み合わせたり、省略したりすることができる。