JP2019082331A - 変位センサ - Google Patents
変位センサ Download PDFInfo
- Publication number
- JP2019082331A JP2019082331A JP2017208308A JP2017208308A JP2019082331A JP 2019082331 A JP2019082331 A JP 2019082331A JP 2017208308 A JP2017208308 A JP 2017208308A JP 2017208308 A JP2017208308 A JP 2017208308A JP 2019082331 A JP2019082331 A JP 2019082331A
- Authority
- JP
- Japan
- Prior art keywords
- waveform
- signal
- unit
- calculated
- displacement sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
- G01S17/14—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves wherein a voltage or current pulse is initiated and terminated in accordance with the pulse transmission and echo reception respectively, e.g. using counters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/487—Extracting wanted echo signals, e.g. pulse detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/24—Querying
- G06F16/248—Presentation of query results
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Measurement Of Optical Distance (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
まず、本実施の形態に従う変位センサ1の外観構成の一例について説明する。図1は、本実施の形態に従う変位センサ1の外観構成を示す斜視図である。図1(A)および図1(B)を参照して、変位センサ1は筐体2を有しており、筐体2には、接続部4と、投受光部6と、表示操作部50とが配置されている。
次に、TOF方式の変位センサの概要について説明する。本実施の形態に従う変位センサ1は、TOF方式の一例である、二値方式(パルス方式)を採用する。二値方式においては、パルス信号を対象物に出射し、対象物から反射して生じる反射信号を統計的に処理した上で、出射したパルス信号のエッジ(立上り部分および/または立下り部分)に対応する部分を特定することで、対象物までの変位を計測する。
次に、本実施の形態に従う変位センサ1のハードウェア構成の一例について説明する。図4は、本実施の形態に従う変位センサ1のハードウェア構成の一例を示す模式図である。図4を参照して、変位センサ1は、主処理部100と、発光素子10と、出射回路12と、受光素子20と、受信回路22と、外部クロック30と、表示操作部50とを含む。
受信信号量算出部112は、積算波形に現れる1または複数の累積値が示す特徴量に基づいて、受信部(受光素子20および受信回路22)で受信される反射信号の強度である受信信号量(反射信号により生じる受信信号の強度)を算出する。この算出される受信信号量(信号の受信信号量)は、当該計測状態におけるS/N(Signal to Noise)比に相当し、受信信号量が大きいほど、計測安定性が高いと評価でき、また、計測分解能も高いと評価できる。受信信号量算出部112における受信信号量の算出処理の詳細については、後述する。
<D.計測処理の概要>
次に、本実施の形態に従う変位センサ1における2段階の計測(ラフ計測およびファイン計測)の詳細について説明する。
本実施の形態に従う変位センサ1におけるラフ計測は、カウンタ計測部104によって実行される。カウンタ計測部104は、計測用クロックCLKおよび計測用クロックCLKを位相シフトさせたクロックに基づいて、時間と関連付けて二値化信号を収集する。収集した二値化信号の時間波形を複数の出射周期(計測周期)について計測する。所定回数(例えば、nサンプル分)にわたって時間波形を計測し、それぞれ計測した複数の時間波形の間で、対応する時間(サンプリングタイミング)毎の二値化情報を累積する。すなわち、二値化情報の時間波形をN回分計測すると、各サンプリングタイミングについてN回分の二値化情報が得られるので、サンプリングタイミング毎にN回分の二値化情報を累積することで、積算波形を算出できる。
本実施の形態に従う変位センサ1におけるファイン計測は、主として、TDCディレイライン106および波形積算部110によって実行される。TDCディレイライン106は、入力された二値化信号を直列多段接続された遅延素子に入力するとともに、カウンタ計測部104によって決定されたストップタイミングを示すストップ信号に応じて、同一タイミングの各遅延素子の値を一括して取込むことで二値化情報の波形データを取得する。
次に、ファイン計測によって取得された積算波形に対するフィルタ処理および段数算出処理について説明する。
距離換算部118は、段数算出処理部116により算出された段数に対して、遅延素子あたりに生じる遅延時間を乗じることで、出射パルスと反射信号との間に生じる時間差Δt、すなわち変位センサ1と対象物OBJとの間の距離Lを算出する。遅延素子あたりに生じる遅延時間は、温度補正TDCディレイライン108を用いて算出される。
出力判定部120は、距離換算部118により算出された変位センサ1と対象物OBJとの間の距離Lと、予め定められたしきい値とを比較して、算出された距離Lがしきい値を超えている場合、あるいは、算出された距離Lがしきい値を下回っている場合には、オン/オフ(あるいは、検出/非検出)の判定結果を出力する。出力判定部120からの判定結果に応じて、筐体2に配置されたインジケータ51、第1表示灯55、第2表示灯56の点灯状態を変化させてもよい。
次に、本実施の形態に従う変位センサ1の受信信号量算出部112における受信信号量算出処理の詳細について説明する。従来の二値方式(パルス方式)では、受信信号量、すなわち発光素子10からの出射パルスが対象物OBJで反射して生じる反射信号の強度を計測することはできない。これは、反射信号を二値化するためである。
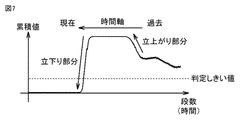
まず、1または複数の累積値が示す特徴量として、積算波形に現れる傾きを利用して受信信号量を算出する方法について説明する。
上述したような積算波形に現れる傾きは、しきい値ではなく、時間幅を利用して算出してもよい。
上述の説明においては、積算波形またはフィルタ後の積算波形から、受信信号量を算出するための特徴量を取得する方法を説明したが、このような特徴量を解析的に決定してもよい。
次に、1または複数の累積値が示す特徴量として、積算波形が示す高さ(累積値の大きさ)を利用して受信信号量を算出する方法について説明する。このとき、積算波形に現れる、予め定められた基準点(例えば、積算波形中の波形エッジと判定しきい値とのクロスポイント)に関連付けられる累積方向の大きさに基づいて、受信信号量を算出してもよい。
次に、1または複数の累積値が示す特徴量として、積算波形が示す高さ(累積値の大きさ)を利用して受信信号量を算出する別の方法について説明する。このとき、積算波形に現れる、予め定められた基準点(例えば、積算波形中の波形エッジと判定しきい値とのクロスポイント)に関連付けられる累積方向の大きさに基づいて、受信信号量を算出してもよい。
次に、1または複数の累積値が示す特徴量として、積算波形が規定する面積を利用して受信信号量を算出する方法について説明する。このとき、積算波形に現れる、予め定められた基準点(例えば、積算波形中の波形エッジと判定しきい値とのクロスポイント)に関連付けられる積算波形が規定する面積に基づいて、受信信号量を算出してもよい。
説明の便宜上、上述の処理においては、1つの積算波形またはフィルタ後の積算波形から受信信号量を算出する方法を説明したが、複数の積算波形からそれぞれ受信信号量を算出し、それらの受信信号量に対して平均化などの統計処理を適用することで、代表値となる受信信号量を算出するようにしてもよい。
上述したような方法により算出される受信信号量は、ユーザなどに向けてセンサ外部へ出力するようにしてもよい。
本実施の形態に従う変位センサ1は、算出される受信信号量の大きさを示す情報を視覚的に出力する出力部を有している。このような出力部としては、図1に示す、インジケータ51、第1表示灯55、第2表示灯56などが対応する。
上述したような、インジケータ51、第1表示灯55、第2表示灯56を介して通知される内容を任意の信号線、通信手段またはインターフェイスを介して、変位センサ1以外の外部装置に出力するようにしてもよい。すなわち、本実施の形態に従う変位センサ1は、算出される受信信号量の大きさを示す情報を外部出力する出力部を有していてもよい。
上述したような方法により算出される受信信号量を用いて、計測状態を適正化してもよい。なお、以下に説明する各種処理は適宜組み合わせることができる。
まず、算出される受信信号量に応じて出射パルスの強度を調整することで、計測状態を適正化する処理について説明する。
(2)発光素子10から出射される出射パルスの出射期間の長さ(パルス幅あるいはデューティ比)を大きくする。
(4)波形積算部110における時間波形の累積回数を増加する。
算出される受信信号量に応じて、出力判定部120における判定基準を変化させてもよい。例えば、変位センサ1の計測中に、算出される受信信号量に応じて、しきい値判定を行なう際に用いられるヒステリシス幅を動的に設定してもよい。この場合、予め定められた関数に従って算出される受信信号量からヒステリシス幅を決定してもよいし、受信信号量とヒステリシス幅との関係を予め規定したテーブルを参照することで、算出される受信信号量に対応するヒステリシス幅を決定できる。
本実施の形態に従う変位センサ1は、複数の二値化信号にわたって蓄積した積算波形(ヒストグラム)に基づいて、出射された出射パルスが対象物OBJで反射されて戻るのに要する時間(受信時点)を検出し、その検出された時間から、変位センサ1と対象物OBJとの間の距離を算出する。併せて、変位センサ1は、積算波形に現れる累積(高さ)方向の特徴量に基づいて、そのときのS/N比に相当する受信信号量を算出する。そして、変位センサ1は、算出した受信信号量をユーザなどへ通知するとともに、算出した受信信号量に応じた計測状態の適正化処理などを実行する。
Claims (11)
- パルス信号を周期的に出射する出射部と、
前記出射部から出射されたパルス信号が対象物で反射して生じる反射信号を受信して、当該受信した反射信号の信号強度を示す二値化信号を出力する受信部と、
前記二値化信号の時間波形の複数を、対応するパルス信号の出射タイミングを基準として対応する時間毎に累積することで、積算波形を生成する波形積算部と、
前記積算波形に現れるパルス信号の波形特徴に対応する波形特徴に基づいて、前記対象物までの距離を示す値を算出する距離算出部と、
前記積算波形に現れる1または複数の累積値が示す特徴量に基づいて、前記受信部で受信される反射信号の強度である受信信号量を算出する受信信号量算出部とを備える、変位センサ。 - 前記算出される受信信号量の大きさを示す情報を視覚的に出力する出力部をさらに備える、請求項1に記載の変位センサ。
- 前記算出される受信信号量の大きさを示す情報を外部出力する出力部をさらに備える、請求項1または2に記載の変位センサ。
- 前記出射部は、前記算出される受信信号量の大きさに応じて、出射するパルス信号の強度および出射期間の長さのうち少なくとも一方を変化させる、請求項1〜3のいずれか1項に記載の変位センサ。
- 前記受信部は、前記算出される受信信号量の大きさに応じて、前記反射信号に対する受信ゲインを変化させる、請求項1〜4のいずれか1項に記載の変位センサ。
- 前記波形積算部は、前記算出される受信信号量の大きさに応じて、前記積算波形を生成するために用いる前記二値化信号の時間波形の数を変化させる、請求項1〜5のいずれか1項に記載の変位センサ。
- 前記距離算出部において算出される距離を示す値に基づいて、前記対象物の存在の有無を判定する出力判定部をさらに備え、
前記出力判定部は、前記算出される受信信号量の大きさに応じて、前記対象物が存在しているとの判定結果と前記対象物が存在していないとの判定結果とを切替えるヒステリシス幅を変更する、請求項1〜6のいずれか1項に記載の変位センサ。 - 前記受信信号量算出部は、前記積算波形に現れる、パルス信号の立上り部分または立下り部分に対応する領域の傾きの大きさに基づいて、前記受信信号量を算出する、請求項1〜7のいずれか1項に記載の変位センサ。
- 前記受信信号量算出部は、前記積算波形に現れる、予め定められた基準点に関連付けられる累積方向の大きさに基づいて、前記受信信号量を算出する、請求項1〜7のいずれか1項に記載の変位センサ。
- 前記受信信号量算出部は、前記積算波形に現れる、予め定められた基準点に関連付けられる、前記積算波形が規定する面積に基づいて、前記受信信号量を算出する、請求項1〜7のいずれか1項に記載の変位センサ。
- 前記波形積算部が生成する積算波形をフィルタ処理するフィルタ処理部をさらに備え、
前記受信信号量算出部は、前記フィルタ処理部によりフィルタ処理された積算波形から前記1または複数の累積値が示す特徴量を算出する、請求項1〜10のいずれか1項に記載の変位センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017208308A JP6907886B2 (ja) | 2017-10-27 | 2017-10-27 | 変位センサ |
| US16/127,256 US11294057B2 (en) | 2017-10-27 | 2018-09-11 | Displacement sensor |
| CN201811060336.1A CN109725323B (zh) | 2017-10-27 | 2018-09-12 | 位移传感器 |
| EP18194050.3A EP3477340A1 (en) | 2017-10-27 | 2018-09-12 | Displacement sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017208308A JP6907886B2 (ja) | 2017-10-27 | 2017-10-27 | 変位センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019082331A true JP2019082331A (ja) | 2019-05-30 |
| JP6907886B2 JP6907886B2 (ja) | 2021-07-21 |
Family
ID=63579070
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017208308A Active JP6907886B2 (ja) | 2017-10-27 | 2017-10-27 | 変位センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11294057B2 (ja) |
| EP (1) | EP3477340A1 (ja) |
| JP (1) | JP6907886B2 (ja) |
| CN (1) | CN109725323B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020090291A1 (ja) * | 2018-10-30 | 2020-05-07 | オムロン株式会社 | センサ装置及び検出方法 |
| JP2020134480A (ja) * | 2019-02-26 | 2020-08-31 | セイコーエプソン株式会社 | 超音波計測装置、及び超音波計測方法 |
| CN111624582A (zh) * | 2020-07-07 | 2020-09-04 | Oppo广东移动通信有限公司 | 周期误差标定方法、装置及周期误差标定系统 |
| JP2021056223A (ja) * | 2019-09-27 | 2021-04-08 | センサーズ・アンリミテッド・インコーポレーテッド | 物体の反射率に依存しない飛行時間 |
| US12535591B2 (en) | 2021-01-28 | 2026-01-27 | Toppan Inc. | Distance image capturing device and method for capturing distance image |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2578788B (en) * | 2018-11-09 | 2022-10-05 | Toshiba Kk | An investigation system and method |
| US12386044B2 (en) | 2020-08-06 | 2025-08-12 | Samsung Electronics Co., Ltd. | Time-of-flight sensor and method of measuring distance using the same |
| CN112764048B (zh) * | 2020-12-30 | 2022-03-18 | 深圳市灵明光子科技有限公司 | 基于飞行时间的寻址和测距方法及测距系统 |
| JP1756736S (ja) * | 2023-03-15 | 2023-11-02 | ||
| JP1756737S (ja) * | 2023-03-15 | 2023-11-02 | ||
| JP1756735S (ja) * | 2023-03-15 | 2023-11-02 | ||
| JP1756734S (ja) * | 2023-03-15 | 2023-11-02 | ||
| JP1762885S (ja) * | 2023-08-25 | 2024-02-05 | ||
| JP1762942S (ja) * | 2023-08-25 | 2024-02-05 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61102575A (ja) * | 1984-10-25 | 1986-05-21 | Matsushita Electric Works Ltd | 光電スイツチ |
| JPH0772237A (ja) * | 1993-06-28 | 1995-03-17 | Nissan Motor Co Ltd | レーダ装置 |
| JPH0886875A (ja) * | 1994-09-16 | 1996-04-02 | Nissan Motor Co Ltd | 車両用レーダ装置 |
| JP2005077379A (ja) * | 2003-09-03 | 2005-03-24 | Denso Corp | レーダ装置 |
| JP2007256191A (ja) * | 2006-03-24 | 2007-10-04 | Hokuyo Automatic Co | 測距方法および測距装置 |
| JP2008180593A (ja) * | 2007-01-24 | 2008-08-07 | Matsushita Electric Works Ltd | 距離変化観測装置 |
| JP2017073322A (ja) * | 2015-10-08 | 2017-04-13 | 株式会社キーエンス | 光電スイッチ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5179286A (en) | 1990-10-05 | 1993-01-12 | Mitsubishi Denki K.K. | Distance measuring apparatus receiving echo light pulses |
| US5623335A (en) * | 1995-05-04 | 1997-04-22 | Bushnell Corporation | Laser range finder with target quality display |
| AT406093B (de) | 1998-05-19 | 2000-02-25 | Perger Andreas Dr | Verfahren zur optischen entfernungsmessung |
| US7777761B2 (en) * | 2005-02-11 | 2010-08-17 | Deltasphere, Inc. | Method and apparatus for specifying and displaying measurements within a 3D rangefinder data set |
| EP1901091B1 (en) * | 2005-07-04 | 2013-08-21 | Nikon Vision Co., Ltd. | Distance measuring apparatus |
| WO2008152647A2 (en) | 2007-06-15 | 2008-12-18 | Ben Gurion University Of The Negev Research And Development Authority | Three-dimensional imaging method and apparatus |
| CN101281022A (zh) * | 2008-04-08 | 2008-10-08 | 上海世科嘉车辆技术研发有限公司 | 基于单目机器视觉的车辆距离测量方法 |
| EP2315045B1 (de) | 2009-10-22 | 2012-08-01 | Sick Ag | Messung von Entfernungen oder Entfernungsänderungen |
| JP6214993B2 (ja) | 2013-10-11 | 2017-10-18 | 株式会社キーエンス | 光電センサ |
| DE102014106463A1 (de) * | 2014-05-08 | 2015-11-12 | Sick Ag | Entfernungsmessender Sensor und Verfahren zur Erfassung und Abstandsbestimmung von Objekten |
| US11131756B2 (en) | 2015-09-29 | 2021-09-28 | Qualcomm Incorporated | LIDAR system with reflected signal strength measurement |
| DE102018220932A1 (de) * | 2018-12-04 | 2020-06-04 | Osram Gmbh | Verfahren zum Bestimmen des Abstands und Rückstrahlvermögens einer Objektoberfläche |
-
2017
- 2017-10-27 JP JP2017208308A patent/JP6907886B2/ja active Active
-
2018
- 2018-09-11 US US16/127,256 patent/US11294057B2/en active Active
- 2018-09-12 EP EP18194050.3A patent/EP3477340A1/en active Pending
- 2018-09-12 CN CN201811060336.1A patent/CN109725323B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61102575A (ja) * | 1984-10-25 | 1986-05-21 | Matsushita Electric Works Ltd | 光電スイツチ |
| JPH0772237A (ja) * | 1993-06-28 | 1995-03-17 | Nissan Motor Co Ltd | レーダ装置 |
| JPH0886875A (ja) * | 1994-09-16 | 1996-04-02 | Nissan Motor Co Ltd | 車両用レーダ装置 |
| JP2005077379A (ja) * | 2003-09-03 | 2005-03-24 | Denso Corp | レーダ装置 |
| JP2007256191A (ja) * | 2006-03-24 | 2007-10-04 | Hokuyo Automatic Co | 測距方法および測距装置 |
| JP2008180593A (ja) * | 2007-01-24 | 2008-08-07 | Matsushita Electric Works Ltd | 距離変化観測装置 |
| JP2017073322A (ja) * | 2015-10-08 | 2017-04-13 | 株式会社キーエンス | 光電スイッチ |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020090291A1 (ja) * | 2018-10-30 | 2020-05-07 | オムロン株式会社 | センサ装置及び検出方法 |
| US12181577B2 (en) | 2018-10-30 | 2024-12-31 | Omron Corporation | Sensor device and detection method |
| JP2020134480A (ja) * | 2019-02-26 | 2020-08-31 | セイコーエプソン株式会社 | 超音波計測装置、及び超音波計測方法 |
| JP7298186B2 (ja) | 2019-02-26 | 2023-06-27 | セイコーエプソン株式会社 | 超音波計測装置、及び超音波計測方法 |
| JP2021056223A (ja) * | 2019-09-27 | 2021-04-08 | センサーズ・アンリミテッド・インコーポレーテッド | 物体の反射率に依存しない飛行時間 |
| JP7588489B2 (ja) | 2019-09-27 | 2024-11-22 | センサーズ・アンリミテッド・インコーポレーテッド | 物体の反射率に依存しない飛行時間 |
| CN111624582A (zh) * | 2020-07-07 | 2020-09-04 | Oppo广东移动通信有限公司 | 周期误差标定方法、装置及周期误差标定系统 |
| US12535591B2 (en) | 2021-01-28 | 2026-01-27 | Toppan Inc. | Distance image capturing device and method for capturing distance image |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6907886B2 (ja) | 2021-07-21 |
| EP3477340A1 (en) | 2019-05-01 |
| US20190129033A1 (en) | 2019-05-02 |
| CN109725323B (zh) | 2023-04-07 |
| US11294057B2 (en) | 2022-04-05 |
| CN109725323A (zh) | 2019-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6907886B2 (ja) | 変位センサ | |
| JP5901004B2 (ja) | 距離又は距離変化を測定するためのセンサ及び方法 | |
| US10830880B2 (en) | Selecting LIDAR pulse detector depending on pulse type | |
| JP6761001B2 (ja) | 距離を計測するための装置及び前記距離を計測するための方法 | |
| CN101213474B (zh) | 距离测量设备 | |
| CN112946675A (zh) | 一种基于时间融合的距离测量方法、系统和设备 | |
| JP2010122221A (ja) | 光電センサ及び光通過時間原理により距離を測定する方法 | |
| JP6665873B2 (ja) | 光検出器 | |
| US20240142584A1 (en) | Lidar time-of-flight signal processing | |
| JP6990356B2 (ja) | センサ装置及び検出方法 | |
| JP5411499B2 (ja) | 単一の自己混合レーザを用いて対象と光入力装置の二次元での相対移動を測定する方法 | |
| CN101349756A (zh) | 激光测距仪及其信号处理方法 | |
| WO2018181013A1 (ja) | 光検出器 | |
| EP3680683B1 (en) | Sensor device and measurement method | |
| US9243905B2 (en) | Distance-measuring sensor and method for synchronizing measurement value generation and measurement value output | |
| JP2011027451A (ja) | 測距装置および測距方法 | |
| JP2010078560A (ja) | 振動周波数計測装置および振動周波数計測方法 | |
| JP2014163884A (ja) | 距離測定装置 | |
| JP6760319B2 (ja) | 光検出装置、光検出方法および光学式測距センサ | |
| Yoshimatsu et al. | Signal processing for distance measurement using laser voltage fluctuation due to self-coupling effect | |
| CN119198022B (zh) | 一种飞秒激光器锁模状态检测方法及系统 | |
| US20240255619A1 (en) | Sensor device | |
| JP3198528B2 (ja) | 光センサおよびその動作方法 | |
| JP2024109001A (ja) | センサ装置 | |
| JP2009229381A (ja) | 反射型光電スイッチおよび物体検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210316 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210601 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210614 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6907886 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |