JP2019098423A - 携帯式操作装置 - Google Patents
携帯式操作装置 Download PDFInfo
- Publication number
- JP2019098423A JP2019098423A JP2017228330A JP2017228330A JP2019098423A JP 2019098423 A JP2019098423 A JP 2019098423A JP 2017228330 A JP2017228330 A JP 2017228330A JP 2017228330 A JP2017228330 A JP 2017228330A JP 2019098423 A JP2019098423 A JP 2019098423A
- Authority
- JP
- Japan
- Prior art keywords
- side wall
- operator
- robot
- switch
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Manipulator (AREA)
- Numerical Control (AREA)
- Push-Button Switches (AREA)
Abstract
Description
配置される。
Claims (5)
- ロボットを操作する携帯式操作装置であって、
前記ロボットを操作する操作パネルと、
前記ロボットの状態を表示する表示パネルと、
前記操作パネルと前記表示パネルとを保持する装置本体とを備え、
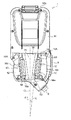
前記装置本体の前記操作パネルが配置された基端側の側部には、操作者が前記装置本体を把持する把持部が形成されており、
前記装置本体の基端側の裏面には、前記把持部を把持した操作者の指を収容する収容凹部が形成されており、
前記収容凹部には、底部と、前記底部から立ち上った対向する一対の側壁部が少なくとも形成されており、
前記一対の側壁部同士は、前記装置本体の先端側から基端側に進むに従って近づくように傾斜しており、
前記一対の側壁部のうち、少なくとも一方の側壁部には、前記一方の側壁部側に押し込むことにより前記ロボットを起動する長尺状の起動スイッチが、前記一方の側壁部から突出するように配置され、かつ、前記装置本体の先端側から基端側に向う前記一方の側壁部に沿って延在していることを特徴とする携帯式操作装置。 - 前記起動スイッチと、前記収容凹部の先端側を形成する先端壁面との間には、操作者の指掛かり用の隙間が形成されていることを特徴とする請求項1に記載の携帯式操作装置。
- 前記起動スイッチは、前記収容凹部の開口縁に対して、前記基端側に近づくように、前記開口縁に対して傾斜していることを特徴とする請求項1または2に記載の携帯式操作装置。
- 前記起動スイッチと、前記底部との間には、操作者の指先を収容する空間が形成されていることを特徴とする請求項1〜3のいずれかに一項に記載の携帯式操作装置。
- 前記一対の側壁部同士が、前記収容凹部の前記底部から前記収容凹部の開口縁に進むに従って広がるように傾斜していることを特徴とする請求項1〜4のいずれかに一項に記載の携帯式操作装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017228330A JP7026495B2 (ja) | 2017-11-28 | 2017-11-28 | 携帯式操作装置 |
| CN201811344467.2A CN109841441B (zh) | 2017-11-28 | 2018-11-12 | 便携式操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017228330A JP7026495B2 (ja) | 2017-11-28 | 2017-11-28 | 携帯式操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019098423A true JP2019098423A (ja) | 2019-06-24 |
| JP7026495B2 JP7026495B2 (ja) | 2022-02-28 |
Family
ID=66883099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017228330A Active JP7026495B2 (ja) | 2017-11-28 | 2017-11-28 | 携帯式操作装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7026495B2 (ja) |
| CN (1) | CN109841441B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7277294B2 (ja) * | 2019-07-09 | 2023-05-18 | ファナック株式会社 | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 |
| CN115519562A (zh) * | 2022-09-19 | 2022-12-27 | 广东美的智能科技有限公司 | 示教器及运动控制系统 |
| CN116476101A (zh) * | 2023-06-25 | 2023-07-25 | 云南涟浪机器人科技有限公司 | 一种用于工业机器人的控制器及工业机器人 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0192080A (ja) * | 1987-10-02 | 1989-04-11 | Hitachi Ltd | 可搬式教示装置 |
| JP2002307347A (ja) * | 2001-04-17 | 2002-10-23 | Fanuc Ltd | 可搬式教示装置 |
| JP2004122243A (ja) * | 2002-09-30 | 2004-04-22 | Yaskawa Electric Corp | 片手持ち教示器 |
| JP2016068242A (ja) * | 2014-10-02 | 2016-05-09 | 上銀科技股▲分▼有限公司 | ロボットの教示装置 |
| JP2016097482A (ja) * | 2014-11-21 | 2016-05-30 | 株式会社神戸製鋼所 | 産業用ロボットの操作に用いられる教示装置 |
| JP2016221644A (ja) * | 2015-06-02 | 2016-12-28 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015016531A (ja) * | 2013-07-12 | 2015-01-29 | 株式会社ダイヘン | 操作装置 |
| JP6679846B2 (ja) * | 2015-06-02 | 2020-04-15 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
-
2017
- 2017-11-28 JP JP2017228330A patent/JP7026495B2/ja active Active
-
2018
- 2018-11-12 CN CN201811344467.2A patent/CN109841441B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0192080A (ja) * | 1987-10-02 | 1989-04-11 | Hitachi Ltd | 可搬式教示装置 |
| JP2002307347A (ja) * | 2001-04-17 | 2002-10-23 | Fanuc Ltd | 可搬式教示装置 |
| JP2004122243A (ja) * | 2002-09-30 | 2004-04-22 | Yaskawa Electric Corp | 片手持ち教示器 |
| JP2016068242A (ja) * | 2014-10-02 | 2016-05-09 | 上銀科技股▲分▼有限公司 | ロボットの教示装置 |
| JP2016097482A (ja) * | 2014-11-21 | 2016-05-30 | 株式会社神戸製鋼所 | 産業用ロボットの操作に用いられる教示装置 |
| JP2016221644A (ja) * | 2015-06-02 | 2016-12-28 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7026495B2 (ja) | 2022-02-28 |
| CN109841441B (zh) | 2022-07-26 |
| CN109841441A (zh) | 2019-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6854871B2 (ja) | 制御装置及び制御プログラム | |
| EP2900344B1 (en) | A game controller | |
| EP3100831B1 (en) | Teaching device and robot system | |
| US11803206B2 (en) | User interface device | |
| CN112207847B (zh) | 安全开关装置和操作装置 | |
| JPWO2017033381A1 (ja) | ロボットシステム | |
| JP7026495B2 (ja) | 携帯式操作装置 | |
| US10722786B2 (en) | Video game controller with unitary back shell for button control and battery access | |
| JP2009083089A (ja) | 手持ち式電動工具のハンドル部 | |
| WO1996009147A1 (en) | Hand-held operating unit | |
| JP4143817B2 (ja) | 片手持ち教示器とこれを備えた産業用ロボット | |
| JPH0722312Y2 (ja) | テレビゲーム機用コントローラー | |
| WO1998043784A1 (en) | Teaching control panel for robot | |
| US4990729A (en) | Teaching console panel for robot | |
| JP2018138316A (ja) | 教示操作端末および教示操作システム | |
| JP2020119229A (ja) | 操作受付装置 | |
| JP3215538U (ja) | マウス装置 | |
| JP5259735B2 (ja) | 人間工学的マウス | |
| JP2020119228A (ja) | 手持ち型操作受付装置 | |
| JP2023165439A (ja) | ストッパー具及びカバー体 | |
| JPH0323638Y2 (ja) | ||
| JPH04205214A (ja) | ジョイスティック付き操作パネル | |
| JPH10261347A (ja) | ハンディスイッチ | |
| JP2021094359A (ja) | 左手用片手ゲームコントローラー | |
| JPH06134685A (ja) | 手持ち操作器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7026495 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |