以下、本発明に係る実施の形態について、図面を参照して説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。
図1に示すカラー画像形成装置1には、4つのプロセスユニット9Y,9M,9C,9Bkが着脱可能に設けられた作像部2が配置されている。各プロセスユニット9Y,9M,9C,9Bkは、カラー画像の色分解成分に対応するイエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(Bk)の異なる色の現像剤を収容している以外は同様の構成となっている。
具体的な各プロセスユニット9としては、表面上に現像剤としてのトナーを担持可能なドラム状の回転体である感光体ドラム10と、感光体ドラム10の表面を一様に帯電させる帯電ローラ11や、感光体ドラム10の表面にトナーを供給する現像装置12、クリーニング装置等を備えている。
プロセスユニット9の上方には、露光部が配置されている。露光部は、画像データに基づいて、レーザ光を発するように構成されている。
作像部2の直下には転写部4が配置されている。転写部4は、駆動ローラ13、二次転写対向ローラ15、複数のテンションローラ、これらのローラによって周回走行可能に張架されている無端状の中間転写ベルト16、各プロセスユニット9の感光体ドラム10に対して中間転写ベルト16を挟んだ対向位置に配置されている一次転写ローラ17等で構成されている。各一次転写ローラ17はそれぞれの位置で中間転写ベルト16の内周面を押圧しており、中間転写ベルト16の押圧された部分と各感光体ドラム10とが接触する箇所に一次転写ニップが形成されている。
また、中間転写ベルト16の駆動ローラ13と、中間転写ベルト16を挟んで駆動ローラ13に対向した位置には二次転写ローラ18が配設されている。二次転写ローラ18は中間転写ベルト16の外周面を押圧しており、二次転写ローラ18と中間転写ベルト16とが接触する箇所に二次転写ニップが形成されている。
給紙部5は、画像形成装置1の下部に位置しており、シートとしての用紙Pを収容したシート積載部としての給紙カセット19や、各給紙カセットから用紙Pを搬出する給紙ローラ20等からなっている。
搬送路6は、給紙部5から搬出された用紙Pを搬送する搬送経路である。搬送路6上には、複数の搬送ローラ対が、後述する排紙部に至るまで、適宜配置されている。
搬送路6上で、給紙部5よりも用紙搬送方向下流側で二次転写ニップ位置よりも上流側には、搬送路6上における用紙Pの位置ズレを補正し、用紙Pを下流側へ搬送する搬送装置30が設けられる。
定着装置7は、加熱源によって加熱される定着ローラ22、その定着ローラ22を加圧可能な加圧ローラ23等を有している。
排紙部は、画像形成装置1の搬送路6の最下流に設けられる。
以下、図1を参照して上記画像形成装置1の基本的動作について説明する。
画像形成装置1において、画像形成動作が開始されると、各プロセスユニット9Y,9C,9M,9Bkの感光体ドラム10の表面に静電潜像が形成される。各感光体ドラム10に露光部3によって露光される画像情報は、所望のフルカラー画像をイエロー、シアン、マゼンタおよびブラックの色情報に分解した単色の画像情報である。各感光体ドラム10上には静電潜像が形成され、各現像装置に蓄えられたトナーが、ドラム状の現像ローラによって感光体ドラム10に供給されることにより、静電潜像は顕像であるトナー画像(現像剤像)として可視像化される。
転写部4では、駆動ローラ13の回転駆動により中間転写ベルト16が図の矢印A1の方向に走行駆動される。また、各一次転写ローラ17には、トナーの帯電極性と逆極性の定電圧又は定電流制御された電圧が印加される。これにより、一次転写ニップにおいて転写電界が形成され、各感光体ドラム10に形成されたトナー画像は一次転写ニップにて中間転写ベルト16上に順次重ね合わせて転写される。このように、例えば、作像部2、露光部、転写部4等は、用紙Pに画像を形成する画像形成部として機能する。
一方、画像形成動作が開始されると、画像形成装置1の下部では、給紙部5の給紙ローラ20が回転駆動することによって、給紙カセット19に収容された用紙Pが搬送路6に送り出される。
搬送路6に送り出された用紙Pは、搬送路6上の搬送装置30やローラ対によって下流側へ搬送されると共に、搬送装置30によってその位置ズレを補正され、二次転写ローラ18と二次転写対向ローラ15との間に形成される二次転写ニップへ送られる。このとき、中間転写ベルト16上のトナー画像のトナー帯電極性と逆極性の転写電圧が印加されており、二次転写ニップに転写電界が形成されている。二次転写ニップに形成された転写電界によって、中間転写ベルト16上のトナー画像が用紙P上に一括して転写される。
トナー画像が転写された用紙Pは、定着装置7へと搬送され、定着ローラ22と加圧ローラ23とによって用紙Pが加熱および加圧されてトナー画像が用紙Pに定着される。そして、トナー画像が定着された用紙Pは、定着ローラ22から分離されて下流の排紙部に搬送され、装置外へ排出される。
以上の説明は、用紙P上にフルカラー画像を形成するときの画像形成動作であるが、4つのプロセスユニット9Y,9C,9M,9Bkのいずれか1つを使用して単色画像を形成したり、2つ又は3つのプロセスユニット9を使用して、2色又は3色の画像を形成したりすることも可能である。
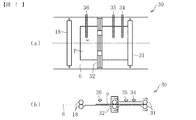
図2(a)および図2(b)に示すように、搬送装置30は、用紙Pを搬送する搬送ローラ31、挟持ローラ(補正部材)32、用紙Pを検知するための第一CIS(上流側検知機構)34,第二CIS(検知機構)35、第三CIS(下流側検知機構)36を有する。挟持ローラ32の下流側には、二次転写ローラ18が設けられる。以下、用紙Pの搬送方向を単に搬送方向、搬送方向の上流側、下流側を、単に、上流側、下流側とも呼ぶ。また、用紙Pの幅方向を単に幅方向とも呼ぶ。
搬送ローラ31および挟持ローラ32は、一対のローラによって構成される搬送部材であり、ローラ同士のニップ部に用紙Pを挟持した状態で各ローラが回転駆動することにより、用紙Pを下流側へ搬送することができる。
挟持ローラ32は、用紙Pの搬送面内で回転可能、そして、幅方向に移動可能に設けられる(図2aの矢印参照)。これらの動作により、挟持した用紙Pを回転あるいは幅方向に移動させ、用紙Pの斜行あるいは幅方向の位置ズレを補正することができる。なお、以下、挟持ローラ32については、用紙Pを搬送するためのローラの回転を、単に回転、斜行補正のための回転を、用紙搬送面内の回転と記載して区別する。
第一CIS34、第二CIS35、および、第三CIS36は、LED等の発光素子とフォトダイオード等の受光素子とからなるフォトセンサが、用紙Pの幅方向に複数並設されたコンタクトイメージセンサである。
第一CIS34および第二CIS35は、搬送ローラ31の下流側で、挟持ローラ32の上流側に設けられる。また、第三CIS36は、挟持ローラ32の下流側に設けられる。
次に、搬送装置30によって用紙Pを搬送しながら、その位置ズレを補正する過程について、図3〜図9、および、図10のフロー図を用いて説明する。
図3(a)および図3(b)に示すように、用紙Pは、搬送ローラ31によって搬送れて第一CIS34、次に第二CIS35に到達する(図10のステップS1)。そして、これらのCISによって用紙Pの斜行量および幅方向の位置ズレ量が検知される(ステップS2)。
具体的な用紙P1の斜行量および幅方向の位置ズレ量の算出方法の一例を、図9を用いて説明する。
図9に示すように、第一CIS34および第二CIS35により、用紙部分と非用紙部分の境目を検知することができ、用紙Pの側端Paを検知することができる。具体的には、第一CIS34により点Pa1の幅方向位置L1を、第二CIS35により点Pa2の幅方向位置L2を検知することができる。そして、用紙Pの幅方向の位置ズレ量は、例えば、幅方向位置L1と幅方向位置L2を平均することによって求めることができる。また、用紙P1の傾斜角(斜行量)θは、第一CIS34と第二CIS35との搬送方向の距離Mを用いて、
TANθ=(L1−L2)/M・・・(1)
と表すことができる。この式(1)により用紙Pの斜行量を求めることができる。なお、用紙Pの幅方向の位置ズレ量については、一つのCISによって検知することも可能であり、例えば、図2の位置でその検知を行ってもよい。
そして、図4(a)および図4(b)に示すように、検知された用紙Pの斜行量および幅方向の位置ズレ量を補正量として、挟持ローラ32が迎え動作を行う(ステップS2、S5)。迎え動作は、用紙P1の斜行の方向、および、幅方向の位置ズレ方向へ、その位置ズレ量の分だけ、基準位置から移動する動作である。言い換えると、挟持ローラ32が、位置ズレした用紙P1に正対した状態で迎え入れることができるように、移動する動作である。また、挟持ローラ32の基準位置は、用紙Pの搬送方向に対して直交して配置された位置である(図3a参照)。なお、後述する平均位置ズレ量に関しては、今回の補正動作では設定されていないものとし(ステップS3)、平均位置ズレ量の詳細については後述する。
図5(a)および図5(b)に示すように、用紙Pが挟持ローラ32に到達すると、用紙Pは挟持されてさらに下流側へ搬送される(ステップS6)。また、上流側の搬送ローラ31は、用紙Pから離間する。
図6(a)および図6(b)に示すように、挟持ローラ32は、用紙Pを搬送すると共に、搬送面内での回転および幅方向の移動によって用紙Pの位置ズレを補正する、戻し動作を行う(ステップS7)。この戻し動作は、用紙Pが下流の第三CIS36に到達するまでの間に行われる。なお、挟持ローラ32は、戻し動作により基準位置へ移動する。
次に、図7(a)および図7(b)に示すように、用紙Pが第三CIS36に到達すると(ステップS8)、第二CIS35および第三CIS36によって用紙Pの斜行量および幅方向の位置ズレ量が再度検知される(ステップS9)。なお、この位置ズレ量の検知方法は、第一CIS34および第二CIS35による検知方法と同様である。また、第二CIS35および第三CIS36によって検知された最初の位置ズレ量が記憶される(ステップS9)。この位置ズレ量は、平均位置ズレ量を算出するために用いられる(詳しくは後述する。このため、今回の説明では、平均位置ズレ量に関係するステップS10、ステップS11の説明は省略する)。
そして、第二CIS35および第三CIS36によって検知された用紙Pの位置ズレ量に基づいて、挟持ローラ32が用紙Pを再度補正する(以下、この動作を用紙の再補正動作と呼ぶ。ステップS12参照。)。この再補正動作時には、第二CIS35および第三CIS36によって、時々刻々の用紙Pの位置ズレ量が繰り返し検知され、この検知された位置ズレ量が、その都度、挟持ローラ32の補正動作にフィードバックされるフィードバック制御が行われる。これにより、用紙Pの位置ズレ量を高精度に補正することができる。以上の第二CIS35および第三CIS36による検知動作は、用紙Pの後端が第二CIS35を通過するまでの間、行われる。また、再補正動作は、用紙Pが下流のローラに到達するまでの間に完了する。
そして、図8(a)および図8(b)に示すように、位置ズレを補正された用紙Pは、下流の二次転写ローラ18に到達し、二次転写ニップ位置にて画像を転写される(ステップS13)。以上のようにして、搬送装置30による用紙Pの搬送動作および搬送動作中の位置ズレ補正動作が行われる。このように、用紙Pは、その位置ズレを補正された状態で二次転写位置に到達し、画像が転写される。また、用紙Pの搬送を終えた挟持ローラ32は、次の用紙の搬送に備えるために再び搬送路に正対した位置である基準位置(図2a参照)に復帰する。
図11(a)および図11(b)は、以上の搬送装置30による搬送動作中の、挟持ローラ32の移動の軌跡を示す図で、(a)図の縦軸が挟持ローラ32の幅方向の位置、(b)図の縦軸が搬送面内の回転角度の基準となる値を示し、(a)図の縦軸の0は搬送路6の中央に配置された状態、(b)図の縦軸の0は搬送路6に正対した状態を示す。なお、(b)図の縦軸の値〔μm〕は、図9の距離Mを200mmとした場合の、L1−L2の値(各CISによる幅方向の検知位置の差)を示しており、この値が大きいほど、挟持ローラ32の回転量は大きくなる。また、横軸は用紙Pの搬送方向の位置を示しており、点T1は迎え動作直前の位置(図3の位置)、点T2は戻し動作直前の位置(図5の位置)、点T3は戻し動作完了後の位置(図6の位置)、点T4は再度の位置ズレ検知直前の位置(図7の手前の位置)、点T5は再補正動中、あるいは、完了後の位置(図8の手前の位置)をそれぞれ示している。また、図の右上に示す太線部は、第二CIS35および第三CIS36によって検知される用紙の位置ズレ量を示している。
図11(a)および図11(b)の例では、第一CIS34および第二CIS35によって検知された幅方向の位置ズレ量が約−500μm、斜行量が約20μmであった。このため、点T1から点T2にかけて挟持ローラ32が迎え動作をし、上記の位置ズレ量の分だけ移動している。そして、点T2から点T3にかけて戻し動作をすることにより、挟持ローラ32が基準位置に復帰し、用紙Pの位置ズレが補正されている。
戻し動作後の点T3の位置では、第一CIS34および第二CIS35によって検知された位置ズレ量が補正された状態にある。しかし、点T4の太線で示すように、第二CIS35および第三CIS36による用紙Pの位置ズレ量の検知時には、幅方向の位置ズレ量が約300μm、斜行量が約150μmだけ検知されている。以降、第二CIS35および第三CIS36によって検知される位置ズレ量に基づいて、点T4から点T5までの間に挟持ローラ32が再補正動作を行い、用紙Pの位置ズレを補正している。
このように、第一CIS34および第二CIS35による検知結果に基づいて、一度目の補正動作である第一の補正動作(迎え動作および戻し動作)を行った場合でも、第二CIS35および第三CIS36による検知時に、相当量の位置ズレ量が検知されている。このように、2回目の検知時に位置ズレが検知される要因(以下、誤差要因とも呼ぶ)としては、各CISの取付位置の誤差や挟持ローラ32による補正量の誤差、そして、CISの検知バラつきがある。また、その他の要因として、第一CIS34および第二CIS35による検知後に生じた位置ズレがある。具体的には、第一CIS34および第二CIS35による検知後、搬送ローラ31による搬送時に生じた位置ズレや、挟持ローラ32が用紙Pを挟持したことによる位置ズレ、挟持ローラ32による搬送および補正動作時に生じた位置ズレ等がある。
そして、このように再補正動作時の補正量が大きい場合には、用紙Pが下流側の二次転写ローラ18(図8参照)に到達するまでに、再補正動作を完了することができなくなるおそれがある。そこで、以下の本実施形態の構成により、再補正動作時の補正量を低減させている。
まず、上記の誤差要因のうち、各CISの取付誤差は、毎回決まった量だけ生じる誤差である。また、その他の誤差に関しては、毎回略決まった量だけ生じる固定成分と、バラつきのある変動成分とが存在すると考えられる。例えば、挟持ローラ32が用紙Pを挟持、搬送、および補正する動作時に生じる誤差は、挟持ローラ32の部品形状の誤差等に起因して、毎回決まった方向に生じる傾向を持つ場合がある。一方で、例えば、搬送されてくる用紙Pの位置ズレ量は様々であるため、用紙Pの位置ズレ量によって、挟持ローラ32の上記動作に起因する誤差量は変動すると考えられる。このように、誤差要因としては、固定成分と、変動成分とが存在する。
そこで本実施形態では、再補正時の補正量を減らすために、前述した平均位置ズレ量を用いる。具体的には、第二CIS35および第三CIS36によって最初に検知される各用紙の位置ズレ量を記憶して(ステップS9)、このデータをN枚蓄積した時点で(ステップS10)、N枚分の位置ズレ量の平均値として平均位置ズレ量を算出する(ステップS11)。つまり、補正動作後、再補正動作を行う前の段階で、第二CIS35および第三CIS36によって検知された位置ズレ量を記憶し、平均位置ズレ量を算出する。このようにすることで、第一CIS34および第二CIS35によって検知された位置ズレ量を補正し、再補正をする前の状態の用紙Pについて、第二CIS35および第三CIS36が検知した位置ズレ量を記憶することができる。言い換えると、前者のCIS二つと後者のCIS二つとの検知誤差を記憶することができる。なお、Nとしては、適宜、必要な値を設定することができ、本実施形態では200枚に設定している。
このようにして算出した平均位置ズレ量は、上記の各固定成分と、各変動成分の平均値との総和となる。そして、算出された平均位置ズレ量を、設定値として記憶する(ステップS11)。
上記のようにして算出された平均位置ズレ量は、一度目の補正動作時に使用される。具体的には、迎え動作の前に、設定された平均位置ズレ量があるか否かを判断する(ステップS3)。そして、平均位置ズレ量が設定されている場合には、ステップS2で第一CIS34および第二CIS35により検知された用紙Pの位置ズレ量に、この平均位置ズレ量を上乗せし(ステップS4)、迎え動作(ステップS5)および戻し動作(ステップS7)を行う。
このように、第二CIS35および第三CIS36によって最初に検知された用紙Pの位置ズレ量の平均値を、一度目の補正量に上乗せすることにより、再補正時の補正量、言い換えると、挟持ローラ32の移動量を減らすことができる。つまり、平均位置ズレ量を一度目の補正量に上乗せすることにより、上記の誤差要因のうち、上記の固定成分と、変動成分の平均値分だけ、用紙Pを再補正動作を始める前に移動させることができる。これにより、誤差要因の固定成分は予め取り除くことができ、さらに、変動成分に関しても、その平均値分だけ予め移動させることができるので、再補正時の補正量を低減することができる。従って、再補正動作に要する時間を短縮することができるので、挟持ローラ32による用紙P搬送中に再補正動作が完了しなくなることを防止できる。このため、挟持ローラ32と下流の二次転写ローラ18との距離を小さくすることもでき、装置を小型化することができる。
なお、第一CIS34および第二CIS35によって検知された位置ズレ量と、第二CIS35および第三CIS36によって検知された位置ズレ量との間に誤差が生じる場合、いずれの検知結果を正として用紙Pの位置ズレを補正するかを選択することになるが、本実施形態では下流側の第二CIS35および第三CIS36の検知結果を正としている。これにより、第一補正後に生じる位置ズレに関しても、その位置ズレ量を平均化し、補正することが可能になる。
図12(a)および図12(b)に、以上の平均位置ズレ量を上乗せして一度目の補正動作を行った場合の、挟持ローラ32の移動軌跡の一例を示す。図の実線部が平均位置ズレ量を上乗せして補正した本実施形態の場合、図の点線部が、図11と同様の、平均位置ズレ量を用いない場合である。なお、設定された平均位置ズレ量は、幅方向の位置ズレ量が200μm、斜行量が100μmとし、この分だけ余分に、迎え動作及び戻し動作を行うものとする。
図12(a)に示すように、第一CIS34および第二CIS35によって、点T1で幅方向の位置ズレ量が約−500μm検知された。そして、記憶された平均位置ズレ量は200μmであるので、迎え動作時の移動量は−300μm、戻し動作時の移動量が300μmになる。つまり、第一補正時の用紙Pの補正量としては、図の点線部と比較すると、200μm小さくなっている。
そして、点T4に達すると、第二CIS35および第三CIS36によって再び用紙の位置ズレ量が検知される。平均位置ズレ量を用いない場合には、約300μmの幅方向の位置ズレ量が検知される(図12aの点線部T4の位置)。対して、本実施形態では、点T4で検知される位置ズレ量が200μm減少し、約100μmになっている。これにより、再補正動作時の移動量は減少し、より早い段階で再補正動作を完了することができる。
また、図12(b)に示すように、第一CIS34および第二CIS35によって検知された斜行量が約20μmで、記憶された平均位置ズレ量は100μmであるので、迎え動作時の移動量が120μm、戻し動作時の移動量が−120μmになる。つまり、第一補正時の用紙Pの補正量としては、図の点線部と比較すると、マイナスの方向に100μmだけ大きくなっている。従って、点T4において、点線部では約150μm検知される斜行量が、約50μmに減少する。これにより、再補正動作時の移動量は減少し、より早い段階で再補正動作が完了することができる。
このように、第一補正動作時に平均位置ズレ量を上乗せして補正することにより、第二CIS35および第三CIS36によって検知される位置ズレ量の一部を予め補正することができる。従って、幅方向の位置ズレ、および、斜行の双方で、再補正時の補正量を減らし、早期に再補正動作を完了することができる。
特に、第一CIS34および第二CIS35による検知時と、第二CIS35および第三CIS36による検知時との間に生じる誤差要因のうち、各CISの取付誤差に関しては、毎回定量的に生じる誤差であるため、本実施形態の構成により、各CISの取付誤差によって生じる再補正時の補正量を、確実になくすことができる。
前述したように、平均位置ズレ量の算出のためのデータを蓄積する用紙Pの枚数Nとしては、本実施形態では、出力動作時から200枚としている。また、200枚毎に平均位置ズレ量を最新の200枚の平均値に置き換えるようにしており、新たな平均値に平均位置ズレ量を置き換えた時点でステップS10のカウントをリセットし、再び200枚をカウントするようにしている。例えば、1〜200枚目は平均位置ズレ量のデータが存在せず、データを蓄積するための期間であり、200枚目のデータを記憶した時点で、平均位置ズレ量を算出してその値を設定値とする(ステップS11)。そして、201枚目〜400枚目は、1〜200枚目のデータから算出された平均位置ズレ量を用いて、第一の補正動作を行う期間である。この際、201枚目から再び新たなカウントをはじめ、400枚目に新たな平均位置ズレ量を算出し、その値を新たな設定値とする。さらに、401枚目から600枚目までは、201枚目〜400枚目のデータによって算出された平均位置ズレ量を用いる期間である。このようにして、200枚毎に新しい平均位置ズレ量に置き換えていくことができる。
この際、201枚目以降に算出される平均位置ズレ量は、既に設定された平均位置ズレ量を上乗せして算出することが必要になる。例えば、1〜200枚目の用紙により算出された幅方向の平均位置ズレ量が60μmであったとして、201〜400枚目に算出された幅方向の平均位置ズレ量が20μmであったとすると、この201〜400枚目において検知された位置ズレ量は、第一の補正動作時に既に60μmを上乗せした上で生じた位置ズレ量であるので、201〜400枚目の平均位置ズレ量としては、60μmを上乗せして、80μmとすることが必要になる。
また、以上の平均位置ズレ量の設定値に関しては、誤差要因が変動する動作が生じた時点で、平均位置ズレ量を初期化し、以降に搬送されてきた用紙Pから、1枚目からデータを取ることもできる。例えば、搬送装置30に用紙Pのジャムが生じて、搬送装置30に設けられたガイド板を開閉し、用紙Pのジャムを解消したとする。この場合、ガイド板の開閉によって各CISの取付位置がわずかに変化し、各CISの取付位置の誤差が変動していると考えられる。従って、ジャム処理後に最初に印刷された用紙を1枚目として、200枚目まで印刷された時点で平均位置ズレ量を算出し、201枚目以降の補正に用いることができる。
この他、誤差要因が変動する動作としては、挟持ローラ32を構成する各部材、特に挟持ローラ32の各動作をさせるための駆動モータの交換動作や挟持ローラ32自体の交換、着脱動作、また、搬送装置30に設けられた各部材、あるいは、搬送装置30自体を部品交換等の理由により、画像形成装置から着脱した場合がある。このような動作を起点として、平均位置ズレ量を初期化し、以降に搬送されてきた用紙から、新たにデータを取ることができる。
また、画像形成装置に複数の給紙部が設けられた構成である場合、いずれの給紙部から用紙を搬送するかにより、用紙の搬送経路が変化するため、上記の誤差要因の値が変動する。また、給紙部によって用紙のサイズが異なる場合には、用紙のサイズによっても誤差要因が変動する。このため、給紙部ごとに平均位置ズレ量のデータを記憶し、各給紙部に対応した平均位置ズレ量を用いて、補正動作を行うことができる。あるいは、用紙Pを供給する給紙部が変更された場合には、それまで設定されていた平均位置ズレ量を初期化し、次に印刷される用紙から、新たに位置ズレ量を記憶して平均位置ズレ量を算出することもできる。さらに、同一の給紙部を使用する場合であっても、使用される給紙部の開閉動作があった場合には、平均位置ズレ量を初期化することもできる。つまり、一度給紙部が開閉された場合には、新たな用紙の束が給紙部にセットされて給紙部に積載された用紙の姿勢が変化していることが考えられる。このような場合、搬送されてくる用紙の位置ズレの傾向が変化し、誤差要因が変動すると考えられる。
以上のように、誤差要因が変動する動作を起点として、それまで設定されていた平均位置ズレ量を初期化し、以降、新たに平均位置ズレ量を算出する制御とすることができる。このようにすることで、第一CIS34および第二CIS35による検知時と、第二CIS35および第三CIS36による検知時との間に生じる検知の誤差の変化を、より正確に捉えることができる。つまり、適切な平均位置ズレ量のデータを用いて、挟持ローラ32に第一の補正動作を行わせることができ、再補正動作時の補正量をより効果的に低減することができる。
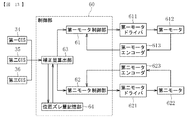
図13は、以上の搬送装置30の各動作を制御する制御部の構成を示すブロック図である。
図13に示すように、制御部60は、第一モータ制御部61と、第二モータ制御部62と、補正量算出部63と、位置ズレ量記憶部64とを有する。
第一モータ制御部61および第二モータ制御部62は、補正量算出部63から送られた補正量の情報に基づいて、挟持ローラ32の各移動動作を制御する部分である。
第一モータ制御部61は、挟持ローラ32の搬送面内での回転動作を制御する部分である。第一モータ制御部61からの信号により、第一モータドライバ611が第一モータ612を駆動させて挟持ローラ32を搬送面内で回転させる。そして、第一モータエンコーダ613により、挟持ローラ32の搬送面内での回転量を検出する。
第二モータ制御部62は、挟持ローラ32の幅方向の移動動作を制御する部分である。第二モータ制御部62からの信号により、第二モータドライバ621が第二モータ622を駆動させて挟持ローラ32を幅方向に移動させる。そして、第二モータエンコーダ623により、挟持ローラ32の幅方向の移動量を検出する。
これらの第一モータ612および第二モータ622は、挟持ローラ32の迎え動作(図10のステップS5)、戻し動作(ステップS7)、再補正動作(ステップS12)、そして、基準位置への復帰動作の際に駆動されることになる。
補正量算出部63は、各CISから受け取った検知情報から、用紙Pの斜行量および幅方向の位置ズレ量を算出する。そして、補正量算出部63は、この位置ズレ量の情報を第一モータ制御部61および第二モータ制御部62に送る。
また、第二CIS35および第三CIS36によって最初に検知された位置情報により、補正量算出部63が、各用紙Pの位置ズレ量を算出すると、この位置ズレ量は、位置ズレ量記憶部64に記憶される。そして、記憶された位置ズレ量が基準枚数(本実施形態では200枚)に達すると、平均位置ズレ量が算出される。また、位置ズレ量記憶部64は、現在の設定値である平均位置ズレ量を補正量算出部63に入力する。補正量算出部63は、迎え動作および戻し動作時の移動量に、入力された平均位置ズレ量を加算する。
第一モータ制御部61および第二モータ制御部62は、補正量算出部63から入力された補正量(移動量)に従って、各モータを駆動させ、挟持ローラ32を搬送面内で回転および幅方向に移動させる。
以上のように、制御部60が、各CISの検知情報に基づいて挟持ローラ32を移動させ、用紙Pの位置ズレを補正することができる。
次に、前述した各動作を行う挟持ローラ32について、図14〜図17を用いて、より詳細にその構成を説明する。挟持ローラ32が行う具体的な動作としては、用紙を搬送するための回転動作、位置ズレを補正するための搬送面内での回転動作、および、幅方向への移動動作等がある。
挟持ローラ32は、ローラ移動機構により、搬送面内での回転動作および幅方向への移動動作を行うことができる。このローラ移動機構は、図14に示すように、本体フレーム151の上に固定されたベースフレーム152を有する。このベースフレーム152は上下2枚の水平板153、154を有し、上側水平板154の上に、挟持ローラ32を支持するローラ保持部材110が水平方向に可動に配設されている。
図15に示すように、上側水平板154の上面における、ローラ保持部材110の底面の四隅に対応する位置に、4個のフリーベアリング111(ボールトランスファー)が配設されている。フリーベアリング111の上に、ローラ保持部材110が水平方向で前後左右に移動可能に配設されている。なお、図15の矢印は、用紙の搬送方向を示している。
フリーベアリング111は公知のように台座の凹部に鋼球が回転自在に嵌め込まれたもので、鋼球の頂部がローラ保持部材110の底面に点接触している。フリーベアリング111の最低数は3個であるが、図示例では4個配設してローラ保持部材110の安定移動化を図っている。
図14に示すように、ローラ保持部材110は、用紙Pの搬送方向と直交する方向に延びた板状フレームで構成されている。板状フレームの両端は上方に向けて直角に折曲され、この折曲部分に軸受114、115が上下に並んで固定されている。ローラ保持部材110の下面の片側には、用紙Pの搬送方向と直交する方向において所定長さで延びた回動受け部110bが、ローラ保持部材110の下面に垂直に一体形成されている。
挟持ローラ32は、下段側の駆動ローラ32bと上段側の従動ローラ32aとで構成されている。上段側の従動ローラ32aの回転軸はローラ保持部材110の上側の軸受114に支持され、下段側の駆動ローラ32bの回転軸はローラ保持部材110の下側の軸受115に支持されている。
下側の軸受115から外側に突出した駆動ローラ32bの回転軸にロータリーエンコーダ144が装着されている。そしてロータリーエンコーダ144で検知される駆動ローラ32bの回転数に基づいて、後述する回転数可変型ローラ駆動モータ140が駆動され、そして従動ローラ32aが駆動ローラ32bの回転に従動して回転するようになっている。
ローラ保持部材110の片側下面には、下方に向けて短く突出した被ガイド部としての支軸110aが固定されている。この支軸110aの下端部にガイドコロ136が回転可能に装着され、また支軸110aの中間部にはカムフォロワ135が回転可能に装着されている。
下側水平板153に、第1モータ120、第2モータ130及びロータリーエンコーダ128、138が左右方向に並んで配設されている。一方の第1モータ120は斜行補生用であって、その回転軸に駆動プーリ121が固定されている。他方の第2モータ130は幅方向の位置ズレ補正用であって、その回転軸に別の駆動プーリ131が固定されている。
なお、一方のロータリーエンコーダ128に代えて、後述の第1回動カム124やレバー部材125の動きと位置を検知する任意のエンコーダ(例えばリニアエンコーダ)や任意のセンサ(例えばレーザ変位計)を設けてもよい。また他方のロータリーエンコーダ138に代えて、後述のシフトカム134やローラ保持部材110の動きと位置を検知する任意のエンコーダ(例えばリニアエンコーダ)や任意のセンサ(例えばレーザ変位計)を設けてもよい。
上下の水平板153、154の間に、従動プーリ122、132が回転可能に支持されている。従動プーリ122、132の回転軸122a、132aの上下両端部は、上下の水平板153、154にそれぞれ回転可能に軸支されている。回転軸122aと132aは互いに平行である。そして、それぞれの駆動プーリ121、131と従動プーリ122、132との間に、タイミングベルト123、133が架け渡されている。
下側水平板153から下方に突出した従動プーリ122、132の回転軸122a、132aに、ロータリーエンコーダ128、138の回転側部品である回転板128a、138aが固定されている。この回転板128a、138aの周縁部には複数のスリットが連続的に形成され、周縁部を上下に挟むようにしてロータリーエンコーダ128、138の固定側部品である投受光器が配設されている。
上側水平板154から上方に突出した従動プーリ122、132の回転軸122a、132aの上端部に、第1回動カム124、シフトカム134が固定されている。第1回動カム124、シフトカム134のカム曲線はそれぞれ等速度カム曲線となるように形成されている。等速度カムを使用することで、第1回動カム124、シフトカム134の回転角と後述のカムフォロワ126、135の直動移動距離が比例関係になり、支軸110aのシフト位置制御やレバー部材125の回動制御が容易になる。
片側のシフトカム134に隣接する位置の上側水平板154に、用紙搬送方向と直交する方向に延びたガイド部としての長穴154aが形成されている。この長穴154aに、支軸110aの下端部のガイドコロ136が挿入されている。図15に示すように、支軸110aの中間部のカムフォロワ135は、シフトカム134の周縁部のカム面に、引張バネ113の力で当接している。長穴154aはガイドコロ136を直線上に移動案内するためのもので、長穴に代えて長溝とすることも可能である。
シフトカム134とは反対側の上側水平板154上に支点軸154bが突設され、この支点軸154bにレバー部材125が水平方向に回動可能に配設されている。このレバー部材125の両端部上に一体形成された支軸125a、125bに、カムフォロワ126と第1押圧部としての作用コロ127が玉軸受などの任意の軸受材を介して回転可能に装着されている。カムフォロワ126の外周面は、第1引張バネ112のバネ力で第1回動カム124の外周面に当接している。作用コロ127の外周面は第1引張バネ112のバネ力で回動受け部110bに当接している。
すなわち、図14に示すように、斜行補正用の第1モータ120、駆動プーリ121、タイミングベルト123、従動プーリ122、第1回動カム124及びレバー部材125、作用コロ127によって、第1押圧部としての作用コロ127を用紙Pの搬送路の方向で前後動する第1駆動部が構成されている。
また、幅方向の位置ズレ補正用の第2モータ130、駆動プーリ131、タイミングベルト133、従動プーリ132及びシフトカム134によって、被ガイド部としての支軸110aにカムフォロワ135を介して当接した第2押圧部(カム外周面)を有し、支軸110aを用紙Pの搬送路と直交する方向で左右動する第2駆動部が構成されている。
本体フレーム151上であって挟持ローラ32の軸方向一端側に、ブラケット155が垂直に配設されている。このブラケット155の外側面に、挟持ローラ32の駆動ローラ32bを回転駆動するための回転数可変型ローラ駆動モータ140が固定されている。ローラ駆動モータ140の回転軸はブラケット155の内側に向けて水平に突出し、この内側に突出した回転軸にピニオン141が固定されている。ピニオン141はブラケット155の内側に軸支された減速ギア142と噛み合わされている。
減速ギア142の回転軸142aは、2段スプラインカップリング143を介して、挟持ローラ32の駆動ローラ32bの回転軸32b1に連結されている。これにより、ローラ駆動モータ140の回転駆動力がピニオン141、減速ギア142及び2段スプラインカップリング143を介して駆動ローラ32bに伝達され、挟持ローラ32が回転駆動される。したがって、挟持ローラ32が用紙Pを挟持した状態で駆動ローラ32bがローラ駆動モータ140で回転することで用紙Pを任意の搬送速度で搬送することができる。
2段スプラインカップリング143は一種の等速自在継手であって、図14の部分拡大図に示すように、第1スプラインギア143a、第2スプラインギア143b、中間スプラインギア143c、ガイドリング143d等で構成されている。
第1スプラインギア143aは外歯車であって、第1駆動部の減速ギア142と共に回転する回転軸142aに設置されている。回転軸142aは、ブラケット155に軸受を介して回転可能に保持されている。
第2スプラインギア143bも外歯車であって、挟持ローラ32の駆動ローラ32bの回転軸32b1に連結されている。中間スプラインギア143cは内歯車であって、挟持ローラ32(ローラ保持部材110)が幅方向に移動しても2つのスプラインギア143a、143bに常に噛合するように幅方向に延設されている。また、2つのスプラインギア143a、143bは、挟持ローラ32(ローラ保持部材110)が斜め方向に回動しても中間スプラインギア143cに噛合するようにクラウン状に形成されている。
このような2段スプラインカップリング143を用いることで、挟持ローラ32が良好に回転駆動される。すなわち、挟持ローラ32が支軸110aを中心にして略水平面方向に回動したり、幅方向にスライド移動したりしても、固定側のローラ駆動モータ140の駆動力が、挟持ローラ32の駆動ローラ32bに精度よく確実に伝達される。
なお、ガイドリング143dは中間スプラインギア143cの幅方向両端部にそれぞれ設置された略環状のストッパ部材であって、2つのスプラインギア143a、143bが幅方向に相対的に移動して2段スプラインカップリング143から脱落するのを防止する。
図16(a)〜(d)は、挟持ローラ32の位置ズレ補正時の動作を示す図で、図16(b)と図16(c)は、用紙Pの斜行補正と幅方向の位置ズレ補正の動作を分かりやすく示すために、斜行補正と横レジ補正の動作を分けて示した図である。実際には、図16(d)のように斜行補正動作と幅方向の位置ズレ補正動作が組み合わせて行われる。
図16(a)→(b)は用紙Pの横レジ補正動作を示したものである。すなわち、第2モータ130が駆動されてシフトカム134が回転されると、シフトカム134によって第2引張バネ113のバネ力に抗するようにローラ保持部材110が右側にスライド移動する。この際、カムフォロワ135は回転しながらシフトカム134の外周を移動するので、幅方向の位置ズレ補正用の第2モータ130に作用するローラ保持部材110の移動負荷が小さくて済む。
また、レバー部材125の作用コロ127は、第1引張バネ112の力を受けながら回動受け部110bの面上を転動するので、ローラ保持部材110のスライド移動がスムーズである。換言すると、作用コロ127がローラ保持部材110の幅方向シフト移動による摩擦負荷を受けないので、ローラ保持部材110のスムーズな回動とシフト移動が可能となっている。なお、第1回動カム124が停止している状態では回動受け部110bも用紙搬送方向では停止したままであるから用紙Pの斜行補正動作は発生しない。
図16(a)→(c)は用紙Pの斜行補正動作を示したものである。すなわち、第1モータ120が駆動されて第1回動カム124が回転されると、レバー部材125が第1回動カム124に押動されて支点軸154bを中心に反時計方向に回動する。
この結果、ローラ保持部材110が回動受け部110bの位置でレバー部材125の作用コロ127に押動され、第1引張バネ112のバネ力に抗するようにローラ保持部材110が右端の支軸110aを中心として反時計方向に回動する。この際、カムフォロワ126、135は回転しながら第1回動カム124、シフトカム134の外周をそれぞれ移動するので、斜行補正用の第1モータ120に作用するローラ保持部材110の回動負荷が小さくて済む。
図16(a)→(d)は用紙Pの幅方向の位置ズレ補正動作と斜行補正動作の組み合わせを示したものである。すなわち、第1モータ120が駆動されて第1回動カム124が回転され、かつ、第2モータ130が駆動されてシフトカム134が回転されると、前述した(b)の横レジ補正動作と(c)の斜行補正動作が組み合わされた動作が発生する。
このように本実施形態では、用紙の搬送路の幅方向に移動可能かつ支軸110aを中心に回転可能なローラ保持部材110に挟持ローラ32を保持し、固定側のローラ駆動モータ140の回転駆動力は2段スプラインカップリング143を介して挟持ローラ32に伝達するようにしている。したがって、ローラ駆動モータ140及び幅方向の位置ズレ補正用の第2モータ130を固定側配置とすることが可能となり、ローラ保持部材110から上の構造の軽量化により斜行補正の応答性向上を図れる。
前述した幅方向の位置ズレ補正と斜行補正において、図17に示すように、1)用紙Pの斜行量をθ、2)幅方向の位置ズレ補正量をΔy、3)用紙の幅方向基準位置(被ガイド部である支軸110aの初期位置)と、第1駆動部の第1押圧部としての作用コロ127の支軸125bの中心との間の距離をdとする。なおΔyは、図17で用紙の幅方向基準位置から右側がブラス、左側がマイナスである。また、図17の矢印は、用紙の搬送方向を示している。
この場合、作用コロ127で前後動する回動受け部110bの前後動距離をΔxとしたとき、下記の数式(1)で演算した結果に基づいて、制御部によって第1駆動部としての斜行補正用の第1モータ120が制御される。
Δx=(d+Δy)tanθ …(2)
(2)式においてΔxを演算するに際し、tanθに対して単にdを掛けるのではなく、(d+Δy)を掛ける理由は次の通りである。すなわち、前述したように図16(b)の幅方向の位置ズレ補正動作又は図16(c)の斜行補正動作のみが発生することは稀であり、通常は図16(d)のように斜行補正動作と幅方向の位置ズレ補正動作が組み合わされた形となる。
したがって、Δyを無視して後述する数式(3)で演算したΔxでローラ保持部材110を回動(迎え作動)させると、迎え作動が大きくなり過ぎたり小さくなり過ぎたりする。つまり幅方向の位置ズレ補正に伴う斜行補正誤差が発生する。
例えば図17のように幅方向の位置ズレ補正のため支軸110aがΔyだけ右側に移動した場合、この移動を考慮せずに斜行補正用の第1モータ120を駆動して回動受け部110bをΔxだけ移動すると、斜行量を補正しきれない。つまり、制御部は下記の数式(2)でΔxを演算するので、迎え作動量が小さ過ぎる結果、その復動時の等量の戻し作動量では斜行量を補正しきれない。
Δx=d・tanθ …(3)
この反対に図17で横レジ補正のため支軸110aがΔyだけ反対側(すなわち左側)に移動した場合を考えると、この移動を考慮せずに斜行補正用の第1モータ120を駆動して回動受け部110bをΔxだけ移動すると、今度は斜行量の補正し過ぎとなる。つまり、迎え作動量が大き過ぎる結果、その復動時の等量の戻し作動量では大き過ぎて斜行量の補正し過ぎとなる。
以上、本発明の実施形態について説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変更を加え得ることは勿論である。
以上で説明した実施形態では、搬送装置30に三つのCISを設け、第一CIS34および第二CIS35を一度目の補正のための検知機構(上流側検知機構)とし、第二CIS35および第三CIS36を再補正動作のための検知機構(下流側検知機構)とした。しかし、例えば、用紙の幅方向の位置ズレのみを補正する場合、CIS一つでも検知動作は可能であるため、搬送装置30にCISを二つだけ設けた構成とすることもできる。この場合、下流側のCISによって最初に検知した幅方向の位置ズレ量を記憶して平均位置ズレ量を算出することができる。また、検知機構に関しても、用紙の位置ズレを検知できるものであれば、適宜、公知の検知機構を採用することができる。
本発明に係る画像形成装置は、図1に示すカラー画像形成装置に限らず、モノクロ画像形成装置や、複写機、プリンタ、ファクシミリ、あるいはこれらの複合機等であってもよい。
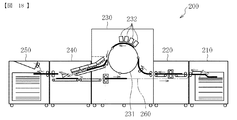
また、以上で説明した実施形態では、電子写真方式の画像形成装置1に設置される搬送装置30に対して本発明を適用したが、インクジェット方式の画像形成装置に設置される搬送装置に対しても本発明を適用することができる。以下、図18を用いてインクジェット方式の画像形成装置について説明する。
図18に示すように、インクジェット方式の画像形成装置200は、給紙部210と、搬送装置220と、画像形成部230と、乾燥部240と、排紙部250とを備えている。
給紙部210から送り出された用紙Pは、搬送装置220によって搬送され、画像形成部230へ送り出される。
画像形成部230においては、用紙Pが円筒形状ドラム231に位置決めされ、円筒形状ドラム231の回転によって図中矢印方向へ搬送される。そして、各色の吐出ヘッド232の下部(用紙Pへの画像形成位置)に所定のタイミングで用紙Pが搬送され、各色のインクが用紙Pに吐き出され、用紙Pの表面上に画像が形成される。
画像形成部230によって画像が形成された用紙Pは、乾燥部240に搬送されてインク中の水分を蒸発させた後、排紙部250にて、作業者が取り出し可能な位置に排出される。
両面印刷が行われる場合には、乾燥工程の後、用紙Pが反転搬送路260へ送られて、用紙Pの表裏が反転した状態で、再び搬送装置220へ送り出される。
上記の搬送装置220に、前述した本発明の搬送装置の構成を適用することにより、前述した本実施形態と同様の効果を得ることができる。つまり、搬送装置220によって用紙Pの斜行および幅方向の位置ズレが補正される。そして、用紙Pの位置ズレが補正された状態で下流の画像形成部230へ搬送される。
シートとしては、用紙P(普通紙)の他、厚紙、はがき、封筒、薄紙、塗工紙(コート紙やアート紙等)、トレーシングペーパ、OHPシート、プラスチックフィルム、プリプレグ、銅箔等が含まれる。