JP2019124683A - オブジェクト速度推定方法と装置及び画像処理機器 - Google Patents
オブジェクト速度推定方法と装置及び画像処理機器 Download PDFInfo
- Publication number
- JP2019124683A JP2019124683A JP2018199076A JP2018199076A JP2019124683A JP 2019124683 A JP2019124683 A JP 2019124683A JP 2018199076 A JP2018199076 A JP 2018199076A JP 2018199076 A JP2018199076 A JP 2018199076A JP 2019124683 A JP2019124683 A JP 2019124683A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- image
- corner
- corner points
- foreground
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/194—Segmentation; Edge detection involving foreground-background segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30236—Traffic on road, railway or crossing
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Abstract
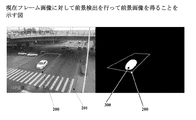
【解決手段】かかる方法は、入力された現在フレーム画像に対して前景検出及びエッジ検出を行い、前景画像及びエッジ画像を取得し;前景画像及びエッジ画像に基づいて候補検出領域を確定し;候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;及び、複数のコーナーポイントの速度を計算し、複数のコーナーポイントの速度の平均値をオブジェクトの速度とするステップを含む。
【選択図】図1
Description
入力された現在フレーム画像に対して前景検出及びエッジ検出を行い、前景画像及びエッジ画像を取得し;
前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定し;
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;
前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値をオブジェクトの速度とすることを含む。
入力された現在フレーム画像に対して前景検出を行い、前景画像を得るための第一検出ユニット;
入力された現在フレーム画像に対してエッジ検出を行い、エッジ画像を得るための第二検出ユニット;
前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定するための確定ユニット;
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを得るための第三検出ユニット;及び
前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値をオブジェクトの速度とするための計算ユニットを含む。
ステップ102:前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定し;
ステップ103:前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;
ステップ104:前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値をオブジェクトの速度とする。

であり、areaforeground≧Th1・height・widthの場合、後続の処理を継続して行う。
threshR=c・Rmax
Harris演算子のレスポンスが最大で且つ該第二閾値threshRよりも大きい画素点は、コーナーポイントと見なすことができ、これにより、コーナーポイント画像を得ることができ、ここでは、Iconnerと表される。
であり、Shi-Tomasiコーナー検出方法では、レスポンス値の計算方式は、
であり、そのうち、λ1及びλ2は、ベクトルAHarrisの2つの固有値である。Harrisコーナー検出に比べ、Shi-Tomasiコーナー検出によるコーナーポイントの抽出は、より安定であるが、固有値を計算する必要があるため、より大きい計算量を要する。
(外1)
(vx及びvyの組み合わせ)が道路の方向
(外2)
に接近することを要し、即ち、
であり、ここでの道路の方向とは、車両の走行方向を指す。
ガウス加重最小二乗を 上述の公式では、k個のコーナーポイントが前述の検証をパスしたとし、また、viは、第i個目のコーナーポイントの速度であり、第i個目のコーナーポイントのx、y方向上での速度成分vx及びvyからなり、即ち、
である。
ステップ502:前景画像の面積が第一閾値よりも大きいかを判断し、判断の結果が「はい」の場合、ステップ503を実行し、そうでない場合、次の1つのフレーム画像に対しての処理を行い;
ステップ503:現在フレーム画像に対してエッジ検出を行い、エッジ画像を取得し、前景画像及びエッジ画像に基づいて候補検出領域を生成し;
ステップ504:候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;
ステップ505:コーナーポイントの数量が第二閾値よりも大きいかを判断し、判断の結果が「はい」の場合、ステップ506を実行し、そうでない場合、次の1つのフレーム画像に対しての処理を行い;
ステップ506:すべてのコーナーポイントの速度を計算し、すべてのコーナーポイントの速度の平均値を取得し;
ステップ507:すべてのコーナーポイントの速度の平均値に対して検証及びフィルタリングを行い、オブジェクトの速度を得る。
第一判断ユニット606の判断結果が「はい」の場合、第一検出ユニット601は、後続の処理を継続して行い;
第一判断ユニット606の判断結果が「いいえ」の場合、第一検出ユニット601は、現在フレーム画像に対しての処理を終了する。
第二判断ユニット607の判断結果が「はい」の場合、第三検出ユニット604は、現在フレーム画像に対しての処理を終了し;
第二判断ユニット607の判断結果が「いいえ」の場合、第三検出ユニット604は、得られたすべてのコーナーポイントのHarris演算子のレスポンスの、大から小への順序に従って、得られたすべてのコーナーポイントのうちから第一所定数量のコーナーポイントを上述の複数のコーナーポイントとして選択し、そのうち、選択された該第一所定数量のコーナーポイント間の距離は、第三閾値よりも大きい。
第三判断ユニット608の判断結果が「はい」の場合、計算ユニット605は、該コーナーポイントの速度を捨てる。
オブジェクト速度推定方法であって、
入力された現在フレーム画像に対して前景検出及びエッジ検出を行い、前景画像及びエッジ画像を取得し;
前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定し;
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;及び
前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値を前記オブジェクト速度とすることを含む、方法。
付記1に記載の方法であって、
前記現在フレーム画像は、ビデオフレーム画像、又は、ビデオフレーム画像中の関心領域である、方法。
付記1に記載の方法であって、
現在フレーム画像に対して前景検出を行い、前景画像を得た後に、前記方法は、さらに、
前記前景画像の面積が前記現在フレーム画像の高さ、幅、及び第一閾値の三者の乗積以上であるかを判断し、「はい」と判断された場合、後続の検出ステップを行い、「いいえ」と判断された場合、現在フレーム画像についての処理を終了する、方法。
付記1に記載の方法であって、
前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定することは、
前記前景画像中の画素点及び前記エッジ画像中の画素点に対してAND論理演算を行ることで得られた画素点を前記候補検出領域中の画素点とすることを含む、方法。
付記1に記載の方法であって、
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得することは、
前記候補検出領域中の各画素点について、前記画素点のHarris演算子のレスポンスが最大で且つ第二閾値よりも大きい場合、前記画素点をコーナーポイントとし、これにより得られた前記候補検出領域中のすべてのコーナーポイントを前記複数のコーナーポイントとすることを含む、方法。
付記5に記載の方法であって、さらに、
得られたすべてのコーナーポイントの数量が第一所定数量よりも小さいかを判断することを含み、
「はい」と判断された場合、現在フレーム画像についての処理を終了し、
「いいえ」と判断された場合、得られたすべてのコーナーポイントのHarris演算子のレスポンスの、大から小への順序に従って、得られたすべてのコーナーポイントのうちから第一所定数量のコーナーポイントを前記複数のコーナーポイントとして選択し、そのうち、選択された前記第一所定数量のコーナーポイント間の距離は、第三閾値よりも大きい、方法。
付記1に記載の方法であって、
オプティカルフロー計算公式により各コーナーポイントの速度を計算し、すべてのコーナーポイントの速度の平均値と前記オブジェクトの速度とする、方法。
付記7に記載の方法であって、さらに、
計算された各コーナーポイントの速度について、前記コーナーポイントの速度が第四閾値以上であるか、又は、前記コーナーポイントの速度ベクトルの方向が道路の方向と異なるかを判断することを含み、
「はい」と判断された場合、前記コーナーポイントの速度を捨てる、方法。
付記7に記載の方法であって、さらに、
移動平均の方法で前記平均値に対して時間の次元(time dimension)でフィルタリングを行うことで得られた速度を前記オブジェクトの速度とすることを含む、方法。
Claims (10)
- オブジェクトの速度を推定する装置であって、
入力された現在フレーム画像に対して前景検出を行い、前景画像を得るための第一検出ユニット;
入力された現在フレーム画像に対してエッジ検出を行い、エッジ画像を得るための第二検出ユニット;
前記前景画像及び前記エッジ画像に基づいて、候補検出領域を確定するための確定ユニット;
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを得るための第三検出ユニット;及び
前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値を前記オブジェクトの速度とするための計算ユニットを含む、装置。 - 請求項1に記載の装置であって、
前記第一検出ユニットが現在フレーム画像に対して前景検出を行って前景画像を得た後に、前記前景画像の面積が前記現在フレーム画像の高さ、幅、及び第一閾値の三者の乗積以上であるかを判断するための第一判断ユニットをさらに含み、
前記第一判断ユニットにより「はい」と判断された場合、前記第一検出ユニットは、後続の処理を行い、
前記第一判断ユニットにより「いいえ」と判断された場合、前記第一検出ユニットは、現在フレーム画像に対しての処理を終了する、装置。 - 請求項1に記載の装置であって、
前記確定ユニットは、前記前景画像中の画素点及び前記エッジ画像中の画素点に対して論理積(AND)演算を行うことで得られた画素点を前記候補検出領域中の画素点とする、装置。 - 請求項1に記載の装置であって、
前記第三検出ユニットは、前記候補検出領域中のHarris演算子のレスポンスが最大であり且つ第二閾値よりも大きい画素点をコーナーポイントとすることで、複数のコーナーポイントを取得する、装置。 - 請求項4に記載の装置であって、
前記第三検出ユニットにより得られたすべてのコーナーポイントの数量が第一所定数量よりも小さいかを判断するための第二判断ユニットをさらに含み、
前記第二判断ユニットにより「はい」と判断された場合、前記第三検出ユニットは、現在フレーム画像に対しての処理を終了し、
前記第二判断ユニットにより「いいえ」と判断された場合、前記第三検出ユニットは、得られたすべてのコーナーポイントのHarris演算子のレスポンスの、大から小への順序に従って、得られたすべてのコーナーポイントのうちから第一所定数量のコーナーポイントを前記複数のコーナーポイントとして選択し、また、選択された前記第一所定数量のコーナーポイント間の距離は、第三閾値よりも大きい、装置。 - 請求項1に記載の装置であって、
前記計算ユニットは、オプティカルフロー計算公式を用いて各コーナーポイントの速度を計算し、すべてのコーナーポイントの速度の平均値を前記オブジェクトの速度とする、装置。 - 請求項6に記載の装置であって、
計算された各コーナーポイントの速度について、該コーナーポイントの速度が第四閾値以上であるか、又は、該コーナーポイントの速度ベクトルの方向が道路の方向と異なるかを判断するための第三判断ユニットをさらに含み、
前記第三判断ユニットにより「はい」と判断された場合、前記計算ユニットは、前記コーナーポイントの速度を捨てる、装置。 - 請求項6に記載の装置であって、
移動平均の方法で前記平均値に対して時間的にフィルタリングを行うことで得られた速度を前記オブジェクトの速度とするための後処理ユニットをさらに含む、装置。 - オブジェクトの速度を推定する方法であって、
入力された現在フレーム画像に対して前景検出及びエッジ検出を行い、前景画像及びエッジ画像を取得し;
前記前景画像及び前記エッジ画像に基づいて候補検出領域を確定し;
前記候補検出領域に対してコーナー検出を行い、複数のコーナーポイントを取得し;及び
前記複数のコーナーポイントの速度を計算し、前記複数のコーナーポイントの速度の平均値を前記オブジェクト速度とすることを含む、方法。 - 請求項1〜8のうちの任意の1項に記載の装置を含む、画像処理機器。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810026930.2A CN110033476A (zh) | 2018-01-11 | 2018-01-11 | 目标速度估计方法、装置和图像处理设备 |
| CN201810026930.2 | 2018-01-11 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019124683A true JP2019124683A (ja) | 2019-07-25 |
| JP7081438B2 JP7081438B2 (ja) | 2022-06-07 |
Family
ID=67234703
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018199076A Expired - Fee Related JP7081438B2 (ja) | 2018-01-11 | 2018-10-23 | オブジェクト速度推定方法と装置及び画像処理機器 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7081438B2 (ja) |
| CN (1) | CN110033476A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112132163A (zh) * | 2020-09-21 | 2020-12-25 | 杭州睿琪软件有限公司 | 识别对象边缘的方法、系统及计算机可读存储介质 |
| CN112150456A (zh) * | 2020-09-30 | 2020-12-29 | 内蒙古科技大学 | 一种基于四点探测的关键点检测方法 |
| CN112784851A (zh) * | 2019-11-11 | 2021-05-11 | 珠海格力电器股份有限公司 | 阈值选取电路及方法、角点检测电路及方法 |
| CN112989987A (zh) * | 2021-03-09 | 2021-06-18 | 北京京东乾石科技有限公司 | 用于识别人群行为的方法、装置、设备以及存储介质 |
| CN114838666A (zh) * | 2022-04-26 | 2022-08-02 | 西安航天动力试验技术研究所 | 一种超分辨实时位移测量系统及测量方法 |
| CN115619789A (zh) * | 2022-12-20 | 2023-01-17 | 山西蒲谷香农业科技有限公司 | 用于黑芝麻丸生产的成丸控制方法 |
| CN116309717A (zh) * | 2023-03-21 | 2023-06-23 | 宜宾精宜科技有限责任公司 | 一种辐照用输送线速度测量装置 |
| CN117237597A (zh) * | 2023-08-30 | 2023-12-15 | 福信富通科技股份有限公司 | 一种基于北斗卫星数据与ai图形融合的数据处理终端 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110751620B (zh) * | 2019-08-28 | 2021-03-16 | 宁波海上鲜信息技术有限公司 | 估算体积和重量的方法、电子设备及计算机可读存储介质 |
| CN110596415A (zh) * | 2019-09-13 | 2019-12-20 | 福建工程学院 | 一种基于单目测距的相邻车辆速度检测方法及装置 |
| CN112651263A (zh) * | 2019-10-09 | 2021-04-13 | 富士通株式会社 | 过滤背景物体的方法和装置 |
| CN110874853B (zh) * | 2019-11-15 | 2024-03-08 | 上海思岚科技有限公司 | 目标运动的确定方法、装置、设备及存储介质 |
| CN111551122A (zh) * | 2020-06-30 | 2020-08-18 | 上海振华重工(集团)股份有限公司 | 一种基于激光雷达的火车车皮数量和长度测量系统及方法 |
| CN112001949B (zh) * | 2020-08-13 | 2023-12-05 | 地平线(上海)人工智能技术有限公司 | 确定目标点移动速度的方法、装置、可读存储介质及设备 |
| CN114648871B (zh) * | 2020-12-18 | 2024-01-02 | 富士通株式会社 | 速度融合方法和装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11211738A (ja) * | 1998-01-27 | 1999-08-06 | Omron Corp | 移動体の速度計測方法およびその方法を用いた速度計測装置 |
| JP2002190027A (ja) * | 2000-12-21 | 2002-07-05 | Nec Corp | 画像認識による速度測定システム及び速度測定方法 |
| JP2006011556A (ja) * | 2004-06-22 | 2006-01-12 | Sumitomo Electric Ind Ltd | 異常事象通知システムおよび異常事象通知方法 |
| JP2006059183A (ja) * | 2004-08-20 | 2006-03-02 | Matsushita Electric Ind Co Ltd | 画像処理装置 |
| CN1980322A (zh) * | 2005-12-07 | 2007-06-13 | 日产自动车株式会社 | 物体检测系统和物体检测方法 |
| US20080166023A1 (en) * | 2007-01-05 | 2008-07-10 | Jigang Wang | Video speed detection system |
| JP2010211398A (ja) * | 2009-03-09 | 2010-09-24 | Denso Corp | 画像処理装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4756660B2 (ja) * | 2008-03-14 | 2011-08-24 | 株式会社ソニー・コンピュータエンタテインメント | 画像処理装置および画像処理方法 |
| JP5520463B2 (ja) * | 2008-09-04 | 2014-06-11 | 株式会社ソニー・コンピュータエンタテインメント | 画像処理装置、対象物追跡装置および画像処理方法 |
| US8553982B2 (en) * | 2009-12-23 | 2013-10-08 | Intel Corporation | Model-based play field registration |
| CN102402680B (zh) * | 2010-09-13 | 2014-07-30 | 株式会社理光 | 人机交互系统中手部、指示点定位方法和手势确定方法 |
| TWI452540B (zh) * | 2010-12-09 | 2014-09-11 | Ind Tech Res Inst | 影像式之交通參數偵測系統與方法及電腦程式產品 |
| AU2011253910B2 (en) * | 2011-12-08 | 2015-02-26 | Canon Kabushiki Kaisha | Method, apparatus and system for tracking an object in a sequence of images |
| CN104183127B (zh) * | 2013-05-21 | 2017-02-22 | 北大方正集团有限公司 | 交通监控视频检测方法和装置 |
| CN103473554B (zh) * | 2013-08-19 | 2016-12-28 | 上海汇纳信息科技股份有限公司 | 人流统计系统及方法 |
| US9158985B2 (en) * | 2014-03-03 | 2015-10-13 | Xerox Corporation | Method and apparatus for processing image of scene of interest |
| US9275289B2 (en) * | 2014-03-27 | 2016-03-01 | Xerox Corporation | Feature- and classifier-based vehicle headlight/shadow removal in video |
| WO2015147764A1 (en) * | 2014-03-28 | 2015-10-01 | Kisa Mustafa | A method for vehicle recognition, measurement of relative speed and distance with a single camera |
| US10401375B2 (en) * | 2014-04-10 | 2019-09-03 | SZ DJI Technology Co., Ltd. | Method and device for measuring flight parameters of an unmanned aerial vehicle |
| CN104902265B (zh) * | 2015-05-22 | 2017-04-05 | 深圳市赛为智能股份有限公司 | 一种基于背景边缘模型的摄像机异常检测方法及系统 |
| US10997428B2 (en) * | 2015-06-01 | 2021-05-04 | Placemeter Inc. | Automated detection of building entrances |
| CN104994360B (zh) * | 2015-08-03 | 2018-10-26 | 北京旷视科技有限公司 | 视频监控方法和视频监控系统 |
| CN106560861A (zh) * | 2015-09-30 | 2017-04-12 | 徐贵力 | 基于计算机视觉的智能监管方法 |
| CN105261042A (zh) * | 2015-10-19 | 2016-01-20 | 华为技术有限公司 | 光流估计的方法及装置 |
| KR102153607B1 (ko) * | 2016-01-22 | 2020-09-08 | 삼성전자주식회사 | 영상에서의 전경 검출 장치 및 방법 |
| CN108229256B (zh) * | 2016-12-21 | 2021-03-02 | 杭州海康威视数字技术股份有限公司 | 一种道路施工检测方法及装置 |
-
2018
- 2018-01-11 CN CN201810026930.2A patent/CN110033476A/zh active Pending
- 2018-10-23 JP JP2018199076A patent/JP7081438B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11211738A (ja) * | 1998-01-27 | 1999-08-06 | Omron Corp | 移動体の速度計測方法およびその方法を用いた速度計測装置 |
| JP2002190027A (ja) * | 2000-12-21 | 2002-07-05 | Nec Corp | 画像認識による速度測定システム及び速度測定方法 |
| JP2006011556A (ja) * | 2004-06-22 | 2006-01-12 | Sumitomo Electric Ind Ltd | 異常事象通知システムおよび異常事象通知方法 |
| JP2006059183A (ja) * | 2004-08-20 | 2006-03-02 | Matsushita Electric Ind Co Ltd | 画像処理装置 |
| CN1980322A (zh) * | 2005-12-07 | 2007-06-13 | 日产自动车株式会社 | 物体检测系统和物体检测方法 |
| US20080166023A1 (en) * | 2007-01-05 | 2008-07-10 | Jigang Wang | Video speed detection system |
| JP2010211398A (ja) * | 2009-03-09 | 2010-09-24 | Denso Corp | 画像処理装置 |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112784851A (zh) * | 2019-11-11 | 2021-05-11 | 珠海格力电器股份有限公司 | 阈值选取电路及方法、角点检测电路及方法 |
| US12254638B2 (en) | 2020-09-21 | 2025-03-18 | Hangzhou Glority Software Limited | Method and system of recognizing object edges and computer-readable storage medium |
| CN112132163B (zh) * | 2020-09-21 | 2024-04-02 | 杭州睿琪软件有限公司 | 识别对象边缘的方法、系统及计算机可读存储介质 |
| CN112132163A (zh) * | 2020-09-21 | 2020-12-25 | 杭州睿琪软件有限公司 | 识别对象边缘的方法、系统及计算机可读存储介质 |
| CN112150456B (zh) * | 2020-09-30 | 2023-06-27 | 内蒙古科技大学 | 一种基于四点探测的关键点检测方法 |
| CN112150456A (zh) * | 2020-09-30 | 2020-12-29 | 内蒙古科技大学 | 一种基于四点探测的关键点检测方法 |
| CN112989987A (zh) * | 2021-03-09 | 2021-06-18 | 北京京东乾石科技有限公司 | 用于识别人群行为的方法、装置、设备以及存储介质 |
| CN114838666B (zh) * | 2022-04-26 | 2023-09-12 | 西安航天动力试验技术研究所 | 一种超分辨实时位移测量方法 |
| CN114838666A (zh) * | 2022-04-26 | 2022-08-02 | 西安航天动力试验技术研究所 | 一种超分辨实时位移测量系统及测量方法 |
| CN115619789B (zh) * | 2022-12-20 | 2023-03-31 | 山西蒲谷香农业科技有限公司 | 用于黑芝麻丸生产的成丸控制方法 |
| CN115619789A (zh) * | 2022-12-20 | 2023-01-17 | 山西蒲谷香农业科技有限公司 | 用于黑芝麻丸生产的成丸控制方法 |
| CN116309717A (zh) * | 2023-03-21 | 2023-06-23 | 宜宾精宜科技有限责任公司 | 一种辐照用输送线速度测量装置 |
| CN117237597A (zh) * | 2023-08-30 | 2023-12-15 | 福信富通科技股份有限公司 | 一种基于北斗卫星数据与ai图形融合的数据处理终端 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7081438B2 (ja) | 2022-06-07 |
| CN110033476A (zh) | 2019-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7081438B2 (ja) | オブジェクト速度推定方法と装置及び画像処理機器 | |
| JP7052663B2 (ja) | 物体検出装置、物体検出方法及び物体検出用コンピュータプログラム | |
| CN111448478B (zh) | 用于基于障碍物检测校正高清地图的系统和方法 | |
| TWI452540B (zh) | 影像式之交通參數偵測系統與方法及電腦程式產品 | |
| US11120292B2 (en) | Distance estimation device, distance estimation method, and distance estimation computer program | |
| US9607402B1 (en) | Calibration of pedestrian speed with detection zone for traffic intersection control | |
| CN107463890B (zh) | 一种基于单目前视相机的前车检测与跟踪方法 | |
| US11093762B2 (en) | Method for validation of obstacle candidate | |
| US9449506B1 (en) | Pedestrian counting and detection at a traffic intersection based on location of vehicle zones | |
| JP7675339B2 (ja) | 物体追跡装置 | |
| CN113269007B (zh) | 道路监控视频的目标跟踪装置以及方法 | |
| US10984263B2 (en) | Detection and validation of objects from sequential images of a camera by using homographies | |
| CN107230218A (zh) | 用于生成对从安装在运载工具上的摄像机捕捉的图像导出的估计的置信度测量的方法和设备 | |
| JP6520740B2 (ja) | 物体検出方法、物体検出装置、およびプログラム | |
| WO2020154990A1 (zh) | 目标物体运动状态检测方法、设备及存储介质 | |
| JP2010244194A (ja) | 物体識別装置 | |
| Liu et al. | Vehicle detection and ranging using two different focal length cameras | |
| JP2013537661A (ja) | ステレオビジョン技術を使用することによる移動物体の自動検出 | |
| US11087150B2 (en) | Detection and validation of objects from sequential images of a camera by using homographies | |
| CN110348332A (zh) | 一种交通视频场景下机非人多目标实时轨迹提取方法 | |
| JP2019066333A (ja) | 車両用外界認識装置 | |
| CN113029185A (zh) | 众包式高精度地图更新中道路标线变化检测方法及系统 | |
| Petrovai et al. | A stereovision based approach for detecting and tracking lane and forward obstacles on mobile devices | |
| CN108629225B (zh) | 一种基于多幅子图与图像显著性分析的车辆检测方法 | |
| JP2017076394A (ja) | 移動物体の計数装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220426 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7081438 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |