JP2020003288A - 劣化検出方法及び劣化検出装置 - Google Patents
劣化検出方法及び劣化検出装置 Download PDFInfo
- Publication number
- JP2020003288A JP2020003288A JP2018121744A JP2018121744A JP2020003288A JP 2020003288 A JP2020003288 A JP 2020003288A JP 2018121744 A JP2018121744 A JP 2018121744A JP 2018121744 A JP2018121744 A JP 2018121744A JP 2020003288 A JP2020003288 A JP 2020003288A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- coil
- conductor
- deterioration
- detection signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
Abstract
Description
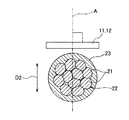
11 励磁コイル
12 検出コイル
16 表示部(出力部)
17 制御部(検出部)
22 導体
D1 長手方向
Claims (5)
- 導体の劣化状態を検出するための劣化検出方法であって、
励磁コイルに励磁信号を流して前記導体上に渦電流を発生させ、検出コイルを用いて前記渦電流に応じた検出信号を出力させる出力工程と、
前記検出信号の大きさと、前記励磁信号及び前記検出信号の位相差と、に基づいて前記導体の劣化状態を検出する検出工程と、を備えたことを特徴とする劣化検出方法。 - 前記導体が、電線の導体から構成され、
前記出力工程において、前記励磁コイル及び前記検出コイルを前記導体に対して、その長手方向に沿って移動させ、
前記検出工程において、前記励磁コイル及び前記検出コイルが移動する毎に得た前記検出信号の大きさと、前記位相差と、に基づいて前記導体の劣化状態を検出することを特徴とする請求項1に記載の劣化検出方法。 - 前記検出工程において、前記励磁コイル及び前記検出コイルが移動する毎に得た前記検出信号の大きさと、前記位相差と、の関係をマッピングしたグラフを作成し、前記グラフに基づいて前記導体の劣化状態を検出することを特徴とする請求項2に記載の劣化検出方法。
- 導体に渦電流を発生させるための励磁コイルと、前記渦電流に応じた検出信号を出力するための検出コイルと、を備え、前記導体の劣化状態を検出するための劣化検出装置において、
前記検出信号の大きさと、前記励磁信号及び前記検出信号の位相差と、を出力する出力部をさらに備えたことを特徴とする劣化検出装置。 - 導体に渦電流を発生させるための励磁コイルと、前記渦電流に応じた検出信号を出力するための検出コイルと、を備え、前記導体の劣化状態を検出するための劣化検出装置において、
前記検出信号の大きさと、前記励磁信号及び前記検出信号の位相差と、に基づいて前記導体状態を検出する検出部をさらに備えたことを特徴とする劣化検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018121744A JP7204291B2 (ja) | 2018-06-27 | 2018-06-27 | 劣化検出方法及び劣化検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018121744A JP7204291B2 (ja) | 2018-06-27 | 2018-06-27 | 劣化検出方法及び劣化検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020003288A true JP2020003288A (ja) | 2020-01-09 |
| JP7204291B2 JP7204291B2 (ja) | 2023-01-16 |
Family
ID=69099516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018121744A Active JP7204291B2 (ja) | 2018-06-27 | 2018-06-27 | 劣化検出方法及び劣化検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7204291B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006071350A (ja) * | 2004-08-31 | 2006-03-16 | Tohoku Electric Power Co Inc | 絶縁被覆電線劣化診断方法及びその診断装置 |
| JP2007127600A (ja) * | 2005-11-07 | 2007-05-24 | Kaisei Engineer Kk | 電磁誘導型検査装置および電磁誘導型検査方法 |
| JP2014102197A (ja) * | 2012-11-21 | 2014-06-05 | Meielec:Kk | 磁気誘導式レール探傷方法及び磁気誘導式レール探傷装置 |
-
2018
- 2018-06-27 JP JP2018121744A patent/JP7204291B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006071350A (ja) * | 2004-08-31 | 2006-03-16 | Tohoku Electric Power Co Inc | 絶縁被覆電線劣化診断方法及びその診断装置 |
| JP2007127600A (ja) * | 2005-11-07 | 2007-05-24 | Kaisei Engineer Kk | 電磁誘導型検査装置および電磁誘導型検査方法 |
| JP2014102197A (ja) * | 2012-11-21 | 2014-06-05 | Meielec:Kk | 磁気誘導式レール探傷方法及び磁気誘導式レール探傷装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7204291B2 (ja) | 2023-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5315814B2 (ja) | 絶縁被覆導体検査方法及び装置 | |
| JP7231357B2 (ja) | 導体劣化検出装置 | |
| CN104849662B (zh) | 一种电磁感应式发电机气隙检测方法及其装置 | |
| US10058944B2 (en) | Wire electric discharge machine determining whether or not electrical discharge machining of workpiece can be performed | |
| JP7112157B2 (ja) | 巻線試験装置 | |
| JP6158057B2 (ja) | 電極式液位検出装置及び電極式液位検出方法 | |
| JP2020003288A (ja) | 劣化検出方法及び劣化検出装置 | |
| JP7339881B2 (ja) | 部分放電検出装置および部分放電検出方法 | |
| JP7196297B2 (ja) | 巻線短絡診断装置および巻線短絡診断方法 | |
| JP5286127B2 (ja) | シールド部材の異常検出方法及びシールド部材の異常検出装置 | |
| JP7374348B2 (ja) | 被覆欠陥検出装置と被覆欠陥検出方法、および回転電機の製造方法 | |
| JP6984975B2 (ja) | 腐食診断方法及び腐食診断装置 | |
| JP2011158438A (ja) | コンクリート柱の鉄筋腐食検査方法 | |
| JP6608234B2 (ja) | 接触判定装置および測定装置 | |
| JP6018011B2 (ja) | 回転電機の絶縁検査装置 | |
| JP5903029B2 (ja) | 絶縁検査装置 | |
| RU67284U1 (ru) | Устройство индикации искрения коллекторных электрических машин постоянного тока с разрезными щетками | |
| JP2012078349A (ja) | パルス励磁検査装置及びパルス励磁検査方法 | |
| JP2015137930A (ja) | 減肉検出装置 | |
| JP2019060728A (ja) | 巻線短絡診断装置および巻線短絡診断方法 | |
| JP2020003289A (ja) | 劣化検出装置及び劣化検出方法 | |
| CN107735651A (zh) | 用于识别开路分解器激励导线的方法和电路 | |
| JP2015219229A (ja) | 巻線短絡箇所の診断システム | |
| CN115004536B (zh) | 短路探测装置以及旋转电机的短路探测方法 | |
| JP2020038072A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221026 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7204291 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |