JP2020005745A - 内視鏡装置 - Google Patents
内視鏡装置 Download PDFInfo
- Publication number
- JP2020005745A JP2020005745A JP2018127445A JP2018127445A JP2020005745A JP 2020005745 A JP2020005745 A JP 2020005745A JP 2018127445 A JP2018127445 A JP 2018127445A JP 2018127445 A JP2018127445 A JP 2018127445A JP 2020005745 A JP2020005745 A JP 2020005745A
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- unit
- spot
- measurement information
- subject
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0623—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements for off-axis illumination
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0638—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements providing two or more wavelengths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0676—Endoscope light sources at distal tip of an endoscope
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2461—Illumination
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Abstract
【課題】被写体が3次元形状である場合において、ユーザーに負担を掛けることなく簡便に且つ正確に計測情報を得ることができる内視鏡装置を提供する。【解決手段】計測補助光出射部は、少なくとも2つの第1特徴線CL1を含む平面光である計測補助光を出射する。被写体を撮像して得られる撮像画像には、交差曲線CCと、交差曲線CC上のうち第1特徴線CL1に対応する位置に形成される少なくとも2つの第1スポットSP1とを含む。第1特徴点の位置を用いて、被写体に関する実寸サイズを表す計測情報を撮像画像上に表示する。【選択図】図5
Description
本発明は、被写体の大きさを測定する内視鏡装置に関する。
内視鏡装置では、観察対象物までの距離又は観察対象物の大きさなどを取得することが行われている。例えば、特許文献1では、内視鏡の先端部から被写体にビーム光線を照射し、そのビーム照射によって被写体上に形成されるビーム光線の点の位置と角度から、観察対象物までの距離などを算出している。また、特許文献2では、平面状の光を被写体に照射して、被写体上において平面状の光と被写体との交差曲線を形成し、交差曲線上の2点の距離を算出している。また、特許文献3では、照明光を発する照明窓が内視鏡の先端部に2つ設けられている場合において、それら2つの照明窓から発せられた2つの照明光によって被写体上に2つの輝点を形成し、その2つの輝点間の距離から、観察対象物までの距離を算出している。
医療分野の内視鏡で観察する被写体は、3次元的形状を有していることが多いことから、3次元的形状に適した計測情報を取得方法が求められている。これに関して、特許文献1については、ビーム光線に基づく1点の位置情報のみであるため、被写体が3次元的形状である場合の計測情報の取得には適していない。
一方、特許文献2については、交差曲線上の2点から距離を算出しているため、被写体が3次元的形状である場合の計測情報の取得には適している。しかしながら、交差曲線上の2点については、ユーザーがGUI(Graphical User Interface)で指定する必要があり、両手がふさがることが多い内視鏡操作では不便である。また、交差曲線は動画上では常時変動することから、特許文献2では、静止画上で指定することになる。そのため、2点間の距離を、静止画ではなく、動画上で計測することが求められていた。
また、特許文献3には、2つの輝点間の位置情報を用いることによって、被写体が3次元的形状である場合の計測情報をより正確に取得することができる。ただし、特許文献3の場合には、2点の輝点の位置情報のみであるため、それら2つの輝点の間の情報、例えば、被写体の起伏などが分かりにくくなっている。
本発明は、被写体が3次元形状である場合において、ユーザーに負担を掛けることなく簡便に且つ正確に計測情報を得ることができる内視鏡装置を提供することを目的とする。
本発明の内視鏡装置は、少なくとも2つの第1特徴線を含む平面光である計測補助光を出射する計測補助光出射部と、計測補助光が照明された被写体を撮像する撮像素子と、被写体を撮像素子で撮像することにより得られる撮像画像を取得する画像取得部であって、撮像画像には、被写体上に形成される交差曲線と、交差曲線上のうち第1特徴線に対応する位置に形成される少なくとも2つの第1特徴点とを含む画像取得部と、撮像画像に基づいて、第1特徴点の位置を少なくとも特定する位置特定部と、第1特徴点の位置を用いて、被写体に関する実寸サイズを表す計測情報を撮像画像上に表示する表示制御部とを備える。
計測情報には、2つの第1特徴点間の第1直線距離が含まれることが好ましい。計測情報には、2つの第1特徴点のうちの一方と、2つの第1特徴点以外の特定点との第2直線距離が含まれることが好ましい。計測情報には、交差曲線のうち2つの第1特徴点の間にある特定交差曲線部の長さが含まれ、位置特定部は、特定交差曲線部の位置を特定し、表示制御部は、第1特徴点の位置と特定交差曲線部の位置を用いて、特定交差曲線部の長さを撮像画像上に表示することが好ましい。
計測補助光には、2つの前記第1特徴線の間に、第1特徴線と異なる複数の第2特徴線が含まれ、特定交差曲線部は、第2特徴線によって交差曲線上に第1特徴点よりも小さく形成される複数の第2特徴点からなり、位置特定部は、撮像画像に含まれる複数の第2特徴点から、特定交差曲線部の位置を特定することが好ましい。
前記計測情報が複数ある場合において、前記撮像画像上に表示する計測情報として、複数の計測情報のうちのいずれか、又は、複数の計測情報のうち2以上を組み合わせたものに切り替えるための計測情報切替部を有することが好ましい。撮像画像の静止画を取得するための静止画取得指示を行う静止画取得指示部を有し、静止画取得指示が行われた場合には、計測情報も合わせて保存されることが好ましい。
被写体を照明するための照明光を発する第1光源部を有し、計測補助光出射部は、第1光源部とは独立して設けられる第2光源部と、第2光源部から発せられた光から、計測補助光を得るための計測補助用光学素子を有することが好ましい。計測補助光出射部は、撮像素子の光軸と計測補助光の光軸を交差させた状態で、計測補助光を被写体に向けて出射するための特定光学部材を有することが好ましい。特定光学部材には反射防止部が設けられることが好ましい。計測補助光出射部は、撮像素子の光軸と計測補助光の光軸を交差させた状態で、計測補助光を前記被写体に向けて出射するための計測補助用スリットを有することが好ましい。第2光源部はレーザー光源であることが好ましい。第2光源部から発せられる光の波長は、495nm以上570nm以下であることが好ましい。
本発明によれば、被写体が3次元形状である場合において、ユーザーに負担を掛けることなく簡便に且つ正確に計測情報を得ることができる。
図1に示すように、内視鏡装置10は、内視鏡12と、光源装置14と、プロセッサ装置16と、モニタ18と、ユーザーインターフェース19とを有する。内視鏡12は光源装置14と光学的に接続され、且つ、プロセッサ装置16と電気的に接続される。プロセッサ装置16は、画像を表示するモニタ18(表示部)に電気的に接続されている。ユーザーインターフェース19は、プロセッサ装置16に接続されており、プロセッサ装置16に対する各種設定操作等に用いられる。なお、ユーザーインターフェース19は図示したキーボードの他、マウスなどが含まれる。
内視鏡12は、被検体内に挿入される挿入部12aと、挿入部12aの基端部分に設けられた操作部12bと、挿入部12aの先端側に設けられる湾曲部12c及び先端部12dを有している。操作部12bのアングルノブ12eを操作することにより、湾曲部12cは湾曲動作する。この湾曲動作に伴って、先端部12dが所望の方向に向けられる。
内視鏡12は、通常モードと、測長モードとを備えており、これら2つのモードは内視鏡12の操作部12bに設けられたモード切替スイッチ13a(モード切替部)によって切り替えられる。通常モードは、照明光によって観察対象を照明するモードである。測長モードは、照明光又は計測補助光を観察対象に照明し、且つ、観察対象の撮像により得られる撮像画像上に、観察対象の大きさなどの測定に用いられる計測情報を表示する。なお、本実施形態における計測情報は、被写体に関する実寸サイズを表している。
また、内視鏡12の操作部12bには、撮像画像の静止画の取得を指示する静止画取得指示を操作するためのフリーズスイッチ13b(静止画取得指示部)が設けられている。ユーザーがフリーズスイッチ13bを操作することにより、モニタ18の画面がフリーズ表示し、合わせて、静止画取得を行う旨のアラート音(例えば「ピー」)を発する。そして、フリーズスイッチ13bの操作タイミング前後に得られる撮像画像の静止画が、プロセッサ装置16内の静止画保存部37(図3参照)に保存される。また、測長モードに設定されている場合には、撮像画像の静止画と合わせて、後述する計測情報も保存することが好ましい。なお、静止画保存部37はハードディスクやUSB(Universal Serial Bus)メモリなどの記憶部である。プロセッサ装置16がネットワークに接続可能である場合には、静止画保存部37に代えて又は加えて、ネットワークに接続された静止画保存サーバ(図示しない)に撮像画像の静止画を保存するようにしてもよい。
なお、フリーズスイッチ13b以外の操作機器を用いて、静止画取得指示を行うようにしてもよい。例えば、プロセッサ装置16にフットペダルを接続し、ユーザーが足でフットペダル(図示しない)を操作した場合に、静止画取得指示を行うようにしてもよい。モード切替についてのフットペダルで行うようにしてもよい。また、プロセッサ装置16に、ユーザーのジェスチャーを認識するジェスチャー認識部(図示しない)を接続し、ジェスチャー認識部が、ユーザーによって行われた特定のジェスチャーを認識した場合に、静止画取得指示を行うようにしてもよい。モード切替についても、ジェスチャー認識部を用いて行うようにしてもよい。
また、モニタ18の近くに設けた視線入力部(図示しない)をプロセッサ装置16に接続し、視線入力部が、モニタ18のうち所定領域内にユーザーの視線が一定時間以上入っていることを認識した場合に、静止画取得指示を行うようにしてもよい。また、プロセッサ装置16に音声認識部(図示しない)を接続し、音声認識部が、ユーザーが発した特定の音声を認識した場合に、静止画取得指示を行うようにしてもよい。モード切替についても、音声認識部を用いて行うようにしてもよい。また、プロセッサ装置16に、タッチパネルなどのオペレーションパネル(図示しない)を接続し、オペレーションパネルに対してユーザーが特定の操作を行った場合に、静止画取得指示を行うようにしてもよい。モード切替についても、オペレーションパネルを用いて行うようにしてもよい。
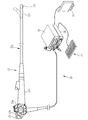
図2に示すように、内視鏡12の先端部は略円形となっており、内視鏡12の撮像光学系を構成する光学部材のうち最も被写体側に位置する対物レンズ21と、被写体に対して照明光を照射するための照明レンズ22と、後述する計測補助光を被写体に照明するための計測補助用光学素子23と、処置具を被写体に向けて突出させるための開口24と、送気送水を行うための送気送水ノズル25とが設けられている。
対物レンズ21の光軸Axは、紙面に対して垂直な方向に延びている。縦の第1方向D1は、光軸Axに対して直交しており、横の第2方向D2は、光軸Ax及び第1方向D1に対して直交する。対物レンズ21と計測補助用光学素子23とは、第1方向D1に沿って配列されている。
図3に示すように、光源装置14は、光源部26(第1光源部)と、光源制御部27とを備えている。光源部26は、被写体を照明するための照明光を発生する。光源部26から出射された照明光は、ライトガイド28に入射され、照明レンズ22を通って被写体に照射される。光源部26としては、照明光の光源として、白色光を出射する白色光源、又は、白色光源とその他の色の光を出射する光源(例えば青色光を出射する青色光源)を含む複数の光源等が用いられる。光源制御部27は、プロセッサ装置16のシステム制御部41と接続されている。光源制御部27は、システム制御部41からの指示に基づいて光源部を制御する。光源制御部27は、通常モードに設定されている場合には、照明光を発するように制御し、測長モードに設定されている場合には、照明光及び計測補助光を発するように制御する。なお、照明光としては、白色光の他、青色帯域から赤色帯域のうち青色帯域の光強度が強い特殊光を用いるようにしてもよい。
内視鏡12の先端部12dには、照明光学系29a、撮像光学系29b、及び計測補助光出射部30が設けられている。照明光学系29aは照明レンズ22を有しており、この照明レンズ22を介して、ライトガイド28からの光が観察対象に照射される。撮像光学系29bは、対物レンズ21及び撮像素子32を有している。観察対象からの反射光は、対物レンズ21を介して、撮像素子32に入射する。これにより、撮像素子32に観察対象の反射像が結像される。
撮像素子32はカラーの撮像センサであり、被検体の反射像を撮像して画像信号を出力する。この撮像素子32は、CCD(Charge Coupled Device)撮像センサやCMOS(Complementary Metal-Oxide Semiconductor)撮像センサ等であることが好ましい。本発明で用いられる撮像素子32は、R(赤)、G(緑)B(青)の3色のRGB画像信号を得るためのカラーの撮像センサである。撮像素子32は、撮像制御部33によって制御される。
撮像素子32から出力される画像信号は、CDS・AGC回路34に送信される。CDS・AGC回路34は、アナログ信号である画像信号に相関二重サンプリング(CDS(Correlated Double Sampling))や自動利得制御(AGC(Auto Gain Control))を行う。CDS・AGC回路34を経た画像信号は、A/D変換器(A/D(Analog /Digital)コンバータ)35により、デジタル画像信号に変換される。A/D変換されたデジタル画像信号は、通信I/F(Interface)36を介して、プロセッサ装置16に入力される。
プロセッサ装置16は、内視鏡12の通信I/Fと接続される通信I/F(Interface)38と、信号処理部39と、表示制御部40と、システム制御部41とを備えている。通信I/Fは、内視鏡12の通信I/F36から伝送されてきた画像信号を受信して信号処理部39に伝達する。信号処理部39は、通信I/F38から受けた画像信号を一時記憶するメモリを内蔵しており、メモリに記憶された画像信号の集合である画像信号群を処理して、撮像画像を生成する。なお、信号処理部39では、測長モードに設定されている場合には、撮像画像に対して、血管などの構造を強調する構造強調処理や、観察対象のうち正常部と病変部などの特定領域との色差を拡張した色差強調処理を施すようにしてもよい。
表示制御部40は、信号処理部39によって生成された撮像画像をモニタ18に表示する。システム制御部41は、内視鏡12に設けられた撮像制御部33を介して、撮像素子32の制御を行う。撮像制御部33は、撮像素子32の制御に合わせて、CDS/AGC34及びA/D35の制御も行う。また、システム制御部41は、光源制御部27を介して、光源部26の制御を行う。また、システム制御部41は、計測補助光出射部30の光源30a(図4参照)の制御を行う。
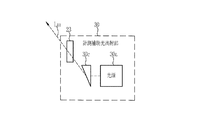
図4に示すように、計測補助光出射部30は、光源30aと、プリズム30cと、計測補助用光学素子23とを備える。光源30a(第2光源部)は、撮像素子32の画素によって検出可能な色の光(具体的には可視光)を出射するものであり、レーザー光源LD(Laser Diode)又はLED(Light Emitting Diode)等の発光素子と、この発光素子から出射される光を集光する集光レンズとを含む。
光源30aが出射する光の波長は、例えば、495nm以上570nm以下とされるが、この波長に限定されるものではない。495nm以上570nm以下の緑色光を用いることで、被写体が特殊光によって照明されている状況下においても、位置特定部50は、後述の第1スポットSP1又は第2スポットSP2の位置を認識し易くなる。その他の波長としては、600nm以上650nm以下であってもよい。光源30aはシステム制御部41によって制御され、システム制御部41からの指示に基づいて光出射を行う。
プリズム30c(特定光学部材)は、光源30aからの光の進行方向を変えるための光学部材である。プリズム30cは、対物レンズ21及びレンズ群を含む撮像光学系の視野と交差するように、光源30aからの光の進行方向を変更する。プリズム30cから出射した光は、計測補助用光学素子23を通って、被写体へと照射される。また、プリズム23cには、反射防止コート(AR(Anti-Reflection)コート)(反射防止部)を施すことが好ましい。このように反射防止コートを設けるのは、計測補助光がプリズム23cを透過せずに反射して、被写体に照射される計測補助光の割合が低下すると、後述する位置特定部50が、計測補助光により被写体上に形成される第1スポットSP1又は第2スポットSP2の位置を認識し難くなるためである。
計測補助用光学素子23は回折光学素子(DOE(Diffractive Optical Element))から構成され、プリズム30cから出射した光を、計測情報を得るための計測補助光に変換する。計測補助光及び計測補助光の進行方向の詳細については、後述する。
なお、計測補助光出射部30は、計測補助光を撮像光学系の視野に向けて出射できるものであればよい。例えば、光源30aが光源装置に設けられ、光源30aから出射された光が光ファイバによって計測補助用光学素子23にまで導光されるものであってもよい。また、プリズム30cを用いずに、光源30a及び計測補助用光学素子23の向きを光軸Axに対して斜めに設置することで、撮像光学系の視野を横切る方向に計測補助光Lmを出射させる構成としてもよい。この場合には、計測補助光Lmを出射させるために、内視鏡の先端部12に計測補助用スリットが形成される。
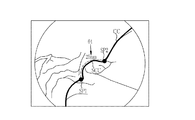
図5に示すように、計測補助光Lmは、少なくとも2つの第1特徴線CLを含む平面状の光で構成されている。この計測補助光Lmが被写体に照射されると、被写体上の起伏に合わせて交差曲線CCが形成され、且つ、交差曲線CC上において2つの第1特徴線CL1に対応する位置にそれぞれ第1スポットSP1(第1特徴点)が形成される。被写体上における第1スポットSP1の位置に基づいて、計測情報が算出される。また、図6に示すように、計測補助光Lmには、2つの第1特徴線CL1の間に、第1特徴線CL1と異なる複数の第2特徴線CL2を含むようにしてもよい。第1特徴線CL1及び第2特徴線CL2を含む計測補助光Lmが被写体に照射されると、複数の第2特徴線CL2に対応する位置にそれぞれ第2スポットCP2(第2特徴点)が形成される。第2スポットSP2は、第1スポットCP1よりも小さく、また、第2スポットSP2の間隔は小さい。そのため、複数の第2スポットSP2によって、交差曲線CC上に特定交差曲線SCCが形成される。特定交差曲線SCCの位置に基づいて、計測情報が算出される。
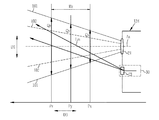
計測補助光の進行方向については、図7に示すように、計測補助光Lmの光軸Lmが対物レンズ21の光軸Axと交差する状態で、計測補助光Lmを出射する。観察距離の範囲Rxにおいて観察可能であるとすると、範囲Rxの近端Px、中央付近Py、及び遠端Pzでは、各点での撮像範囲(矢印Qx、Qy、Qzで示す)における計測補助光によって被写体上に形成される第1スポットSP1又は第2スポットSP2の位置(各矢印Qx、Qy、Qzが光軸Axと交わる点)が異なることが分かる。なお、撮像光学系の撮影画角は2つの実線101で挟まれる領域内で表され、この撮影画角のうち収差の少ない中央領域(2つの点線102で挟まれる領域)で計測を行うようにしている。
以上のように、計測補助光の光軸Lmを光軸Axと交差する状態で、計測補助光Lmを出射することによって、観察距離の変化に対するスポット位置の移動の感度が高いことから、被写体の大きさを高精度に計測することができる。そして、計測補助光が照明された被写体を撮像素子32で撮像することによって、第1スポットSP1又は第2スポットSP2を含む撮像画像が得られる。第2撮像画像では、第1スポットSP1又は第2スポットSP2の位置は、対物レンズ21の光軸Axと計測補助光Lmの光軸Lmとの関係、及び観察距離に応じて異なるが、観察距離が近ければ、同一の実寸サイズ(例えば5mm)を示すピクセル数が多くなり、観察距離が遠ければピクセル数が少なくなる。
したがって、詳細を後述するように、第1スポットSP1又は第2スポットSP2の位置と被写体の実寸サイズに対応する計測情報(ピクセル数)との関係を示す情報を予め記憶しておくことで、第1スポットSP1又は第2スポットSP2の位置から計測情報を算出することができる。
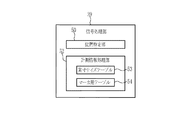
図8に示すように、プロセッサ装置16の信号処理部39は、第1スポットSP1又は第2スポットSP2の位置認識、及び計測情報の算出を行うために、位置特定部50と、計測情報処理部52とを有している。なお、信号処理部39は、測長モードに設定されている場合に、第1スポットSP1又は第2スポットSP2を含む撮像画像が入力される。この第1スポットSP1又は第2スポットSP2を含む撮像画像は、通信I/F38(画像取得部)で取得される。
位置特定部50は、撮像画像から、第1スポットSP1又は第2スポットSP2の位置を特定する。第1スポットSP1又は第2スポットSP2は、撮像画像において、計測補助光の色に対応する成分を多く含む略円状の緑色領域で表示される。したがって、略円状の緑色領域から第1スポットSP1又は第2スポットSP2の位置を特定する。位置の特定方法としては、例えば、撮像画像を二値化し、二値化画像のうち白部分(信号強度が二値化用閾値より高い画素)の重心を、第1スポットSP1又は第2スポットSP2の位置として特定する。
計測情報処理部52は、第1スポットSP1又は第2スポットSP2の位置から、計測情報を算出する。算出された計測情報は、表示制御部40によって、撮像画像上に表示される。計測情報について2つの第1スポットSP1の位置に基づいて算出する場合、被写体が3次元形状を有している状況下においても、正確に計測情報を算出することができる。また、2つの第1スポットSP1の位置は、プロセッサ装置16において自動的に認識されることから、それら2つの第1スポットSP1の位置の取得に、ユーザーに負担をかけることがない。また、被写体が動いて交差曲線の位置が変わったとしても、交差曲線上の2つの第1スポットSP1は自動的に認識し、この認識結果に基づいて計測情報が算出される。したがって、撮像画像の動画上においても、計測情報の取得が可能である。
計測情報には、図9に示すように、2つの第1スポットSP1、第2スポットSP2間の直線距離を示す第1直線距離が含まれる。計測情報処理部52は、以下の方法で、第1直線距離を算出する。計測情報処理部52では、図10に示すように、第1スポットSP1の位置に基づいて、第1スポットSP1における実寸サイズを示す座標(xp1、yp1、zp1)を求める。ここで、xp1、yp1は、それぞれ撮像画像にける第1スポットSP1の位置の座標から、実寸サイズに対応する座標を得る。zp1は、第1スポットSP1の位置の座標と、予め定められた特定スポットSPk(特定点)の位置の座標から、実寸サイズに対応する座標を得る。同様にして、第2スポットSP2の位置に基づいて、第2スポットSP2における実寸サイズを示す座標(xp2、yp2、zp2)を求める。また、xp2、yp2は、それぞれ撮像画像にける第2スポットSP2の位置の座標から、実寸サイズに対応する座標を得る。zp2は、第2スポットSP2の位置の座標と、予め定められた特定スポットSPk(特定点)の位置の座標から、実寸サイズに対応する座標を得る。そして、下記式)により、第1直線距離を算出する。
式)第1直線距離=
((xp2−xp1)2+(yp2−yp1)2+(zp2−zp1)2)0.5
算出された第1直線距離は、撮像画像上に、計測情報60(図9では「20mm」)として表示される。なお、特定スポットSPkはモニタ18上に表示してもよく、表示しなくてもよい。
式)第1直線距離=
((xp2−xp1)2+(yp2−yp1)2+(zp2−zp1)2)0.5
算出された第1直線距離は、撮像画像上に、計測情報60(図9では「20mm」)として表示される。なお、特定スポットSPkはモニタ18上に表示してもよく、表示しなくてもよい。
また、計測情報には、図11に示すように、2つの第1スポットSP1、第2スポットSP2のうちの一方(図11では「SP1」とする)と、特定スポットSPk(特定点)との間の直線距離を示す第2直線距離が含まれる。計測情報処理部52では、例えば、第1スポットSP1と特定スポットSPkとの第2直線距離を求める場合には、第1スポットSP1の位置の座標と、予め定められた特定スポットSPk(特定点)の位置の座標から、実寸サイズに対応する座標zp1を得る。この座標zp1が、第1スポットSP1と特定スポットSPkとの第2直線距離となる。算出された第2直線距離は、撮像画像上において計測情報62(図11では「12mm」)として表示される。
計測情報には、図12に示すように、交差曲線CCのうち2つの第1スポットSP1、第2スポットSP2の間にある特定交差曲線SCCの長さが含まれる。計測情報処理部52は、以下の方法で、特定交差曲線SCCの長さを算出する。図13に示すように、特定交差曲線SCCのうち第1スポットSP1とこの第1スポットSP1に隣接する第2スポットSP2(1)との第1直線距離を求め、求めた第1直線距離をSCC(0)とする。ここで、第1直線距離の算出方法は上記と同様である(以下も同様)。次に、特定交差曲線SCCのうち第2スポットSP2(1)とこの第2スポットSP2(1)に隣接する第2スポットSP2(2)との第1直線距離を求め、求めた第1直線距離をSL(1)とする。
以上の方法で、第2スポットSP2(3)と第2スポットSP2(4)との第1直線距離SCC(3)、・・・、第2スポットSP2(n−1)と第2スポットSP2(n)(nは2以上の自然数)との第1直線距離SL(n−1)を算出する。また、第2スポットSP(n)とこの第2スポットSP(n)に隣接する第2スポットSPとの第1直線距離SL(n)を算出する。そして、得られた全ての第1直線距離SL(0)、SL(1)、・・・、SL(n−1)、SL(n)を足し合わせることによって、特定交差曲線SCCの長さが算出される。算出された特定交差曲線SCCの長さは、撮像画像上において計測情報64(図12では「25mm」)として表示される。
計測情報には、図14に示すように、被写体の実寸サイズを表す計測用マーカが含まれる。計測用マーカとしては、例えば、第1スポットSP1、第2スポットSP2を中心とする同心円の計測用マーカMCが含まれる。同心円の計測用マーカMCは、第1スポットSP1、第2スポットSP2からの距離が5mmであることを表している。計測用マーカは、表示制御部40によって、撮像画像上に表示される。計測情報処理部52は、第1スポットSP1、第2スポットSP2の位置に基づいて、計測用マーカを生成する。具体的には、計測情報処理部52は、撮像画像におけるスポットの位置と被写体の実寸サイズを示す計測用マーカとの関係を記憶したマーカ用テーブル54(図8参照)を参照して、スポットの位置からマーカの大きさを算出する。そして、計測情報処理部52では、マーカの大きさに対応する計測用マーカを生成する。なお、マーカ用テーブル54の作成方法については後述する。また、計測用マーカの形状については、同心円の他、十字などが含まれる。
なお、計測情報処理部52では、計測情報として、第1直線距離、第2直線距離、特定交差曲線の長さ、又は、計測用マーカのうち少なくとも1つを算出する。また、表示制御部40は、計測情報のうち1又は複数組み合わせて表示してもよい。この場合、モード切替スイッチ13a(計測情報切替部)を操作して、撮像画像上に表示する計測情報として、複数の計測情報のうちのいずれか、又は、複数の計測情報のうち2以上を組み合わせたものに切り替える。例えば、モード切替スイッチ13aを操作する毎に、撮像画像上に表示される計測情報が、第1直線距離→第2直線距離→特定交差曲線の長さ→計測用マーカ→「第1直線距離、第2直線距離、特定交差曲線の長さ、又は、計測用マーカのうち2以上を組み合わせたもの」の順で切り替えるようにすることが好ましい。なお、計測情報を切り替える順序や種類については、ユーザーインターフェース19の操作によって、適宜変更が可能である。
なお、複数の計測情報のうち第1直線距離と第2直線距離を組み合わせて表示する場合には、図15に示すように、第1スポットSP1、第2スポットSP2の第1直線距離(図15では「20mm」)に加えて、第1スポットSP1と特定スポットSPkとの第2直線距離(図15では「12mm」)、及び、第1スポットSP1と特定スポットSPkとの第2直線距離(図15では「25mm」)が撮像画像上に表示される。
また、複数の計測情報のうち第1直線距離、第2直線距離、及び特定交差曲線の長さを組み合わせて表示する場合には、図16に示すように、第1スポットSP1、第2スポットSP2の第1直線距離(図16では「20mm」)に加えて、第1スポットSP1と特定スポットSPkとの第2直線距離(図16では「12mm」)、第2スポットSP2と特定スポットSPkとの第2直線距離(図16では「25mm」)、及び、特定交差曲線の長さ(図16では「25mm」)が撮像画像上に表示される。
マーカ用テーブル54の作成方法について、以下説明する。スポットの位置とマーカの大きさとの関係は、実寸サイズのパターンが規則的に形成されたチャートを撮像することで得ることができる。例えば、計測補助光をチャートに向けて出射し、観察距離を変化させてスポットの位置を変えながら実寸サイズと同じ罫(5mm)もしくはそれより細かい罫(例えば1mm)の方眼紙状のチャートを撮像し、スポットの位置(撮像素子32の撮像面におけるピクセル座標)と実寸サイズに対応するピクセル数(実寸サイズである5mmが何ピクセルで表されるか)との関係を取得する。
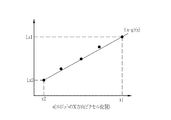
図17に示すように、(x1、y1)は、撮像素子32の撮像面におけるスポットSPのX、Y方向のピクセル位置(左上が座標系の原点)である。スポットSPMの位置(x1、y1)での、実寸サイズ5mmに対応するX方向ピクセル数をLx1とし、Y方向ピクセル数をLy1とする。このような測定を、観察距離を変えながら繰り返す。図18は、図17と同じ5mm罫のチャートを撮像した状態を示しているが、図17の状態よりも撮影距離が遠端に近い状態であり、罫の間隔が狭く写っている。図18の状態において、撮像素子32の撮像面におけるスポットSPNの位置(x2、y2)での実寸サイズ5mmに対応するX方向ピクセル数をLx2とし、Y方向ピクセル数をLy2とする。そして、観察距離を変えながら、図17、18のような測定を繰り返し、結果をプロットする。なお、図17、18では、対物レンズ21の歪曲収差を考慮せず表示している。
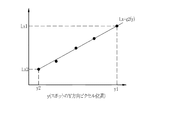
図19は、スポットの位置のX座標とLx(第2の計測用マーカのX方向ピクセル数)との関係を示しており、図20は、スポットの位置のY座標とLxとの関係を示している。Lxは図19の関係よりX方向位置の関数として、Lx=g1(x)と表され、また、Lxは、図20の関係より、Y方向位置の関数として、Lx=g2(y)として表される。g1、g2は上述のプロット結果から、例えば、最小二乗法により求めることができる。
なお、スポットのX座標とY座標とは一対一に対応しており、関数g1、g2のいずれを用いても、基本的に同じ結果(同じスポット位置に対しては同じピクセル数)が得られるため、第2の計測用マーカの大きさを算出する場合には、どちらの関数を用いてもよく、g1、g2のうち位置変化に対するピクセル数変化の感度が高い方の関数を選んでもよい。また、g1、g2の値が大きく異なる場合には、「スポットの位置を認識できなかった」と判断してもよい。
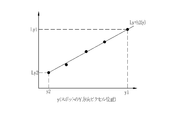
図21は、スポット位置のX座標とLy(Y方向ピクセル数)との関係を表しており、図22は、スポット位置のY座標とLyとの関係を表している。図21の関係より、LyはX方向位置の座標としてLy=h1(x)と表され、図22の関係より、LyはY方向位置の座標としてLy=h2(y)として表される。Lyについても、Lxと同様に関数h1、h2のいずれを用いてもよい。
以上のように得られた関数g1、g2、h1、h2については、ルックアップテーブル形式によってマーカ用テーブルに記憶される。なお、関数g1、g2については、関数形式でマーカ用テーブルに記憶するようにしてもよい。
上記実施形態において、信号処理部39、表示制御部40、システム制御部41、位置特定部50、計測情報処理部52といった各種の処理を実行する処理部(processing unit)のハードウェア的な構造は、次に示すような各種のプロセッサ(processor)である。各種のプロセッサには、ソフトウエア(プログラム)を実行して各種の処理部として機能する汎用的なプロセッサであるCPU(Central Processing Unit)、FPGA (Field Programmable Gate Array) などの製造後に回路構成を変更可能なプロセッサであるプログラマブルロジックデバイス(Programmable Logic Device:PLD)、各種の処理を実行するために専用に設計された回路構成を有するプロセッサである専用電気回路などが含まれる。
1つの処理部は、これら各種のプロセッサのうちの1つで構成されてもよいし、同種または異種の2つ以上のプロセッサの組み合せ(例えば、複数のFPGAや、CPUとFPGAの組み合わせ)で構成されてもよい。また、複数の処理部を1つのプロセッサで構成してもよい。複数の処理部を1つのプロセッサで構成する例としては、第1に、クライアントやサーバなどのコンピュータに代表されるように、1つ以上のCPUとソフトウエアの組み合わせで1つのプロセッサを構成し、このプロセッサが複数の処理部として機能する形態がある。第2に、システムオンチップ(System On Chip:SoC)などに代表されるように、複数の処理部を含むシステム全体の機能を1つのIC(Integrated Circuit)チップで実現するプロセッサを使用する形態がある。このように、各種の処理部は、ハードウェア的な構造として、上記各種のプロセッサを1つ以上用いて構成される。
さらに、これらの各種のプロセッサのハードウェア的な構造は、より具体的には、半導体素子などの回路素子を組み合わせた形態の電気回路(circuitry)である。
10 内視鏡装置
12 内視鏡
12a 挿入部
12b 操作部
12c 湾曲部
12d 先端部
12e アングルノブ
13a モード切替スイッチ
13b フリーズスイッチ
14 光源装置
16 プロセッサ装置
18 モニタ
19 ユーザーインターフェース
21 対物レンズ
22 照明レンズ
23 計測補助用レンズ
24 開口
25 送気送水ノズル
26 光源部
27 光源制御部
28 ライトガイド
29a 照明光学系
29b 撮像光学系
30 計測補助光出射部
30a 光源
30c プリズム
32 撮像素子
33 撮像制御部
34 CDS/AGC回路
35 A/D回路
36 通信I/F(Interface)
37 静止画保存部
38 通信I/F(Interface)
39 信号処理部
40 表示制御部
41 システム制御部
50 位置特定部
52 計測情報処理部
53 実寸サイズテーブル
54 マーカ用テーブル
SP1 第1スポット
SP2 第2スポット
SPk 特定スポット
CC 交差曲線
SCC 特定交差曲線
MC 計測用マーカ
12 内視鏡
12a 挿入部
12b 操作部
12c 湾曲部
12d 先端部
12e アングルノブ
13a モード切替スイッチ
13b フリーズスイッチ
14 光源装置
16 プロセッサ装置
18 モニタ
19 ユーザーインターフェース
21 対物レンズ
22 照明レンズ
23 計測補助用レンズ
24 開口
25 送気送水ノズル
26 光源部
27 光源制御部
28 ライトガイド
29a 照明光学系
29b 撮像光学系
30 計測補助光出射部
30a 光源
30c プリズム
32 撮像素子
33 撮像制御部
34 CDS/AGC回路
35 A/D回路
36 通信I/F(Interface)
37 静止画保存部
38 通信I/F(Interface)
39 信号処理部
40 表示制御部
41 システム制御部
50 位置特定部
52 計測情報処理部
53 実寸サイズテーブル
54 マーカ用テーブル
SP1 第1スポット
SP2 第2スポット
SPk 特定スポット
CC 交差曲線
SCC 特定交差曲線
MC 計測用マーカ
Claims (13)
- 少なくとも2つの第1特徴線を含む平面光である計測補助光を出射する計測補助光出射部と、
前記計測補助光が照明された被写体を撮像する撮像素子と、
前記被写体を前記撮像素子で撮像することにより得られる撮像画像を取得する画像取得部であって、前記撮像画像には、前記被写体上に形成される交差曲線と、前記交差曲線上のうち前記第1特徴線に対応する位置に形成される少なくとも2つの第1特徴点とを含む画像取得部と、
前記撮像画像に基づいて、前記第1特徴点の位置を少なくとも特定する位置特定部と、
前記第1特徴点の位置を用いて、前記被写体に関する実寸サイズを表す計測情報を前記撮像画像上に表示する表示制御部とを備える内視鏡装置。 - 前記計測情報には、2つの前記第1特徴点間の第1直線距離が含まれる請求項1記載の内視鏡装置。
- 前記計測情報には、2つの前記第1特徴点のうちの一方と、前記2つの第1特徴点以外の特定点との第2直線距離が含まれる請求項1または2記載の内視鏡装置。
- 前記計測情報には、前記交差曲線のうち2つの前記第1特徴点の間にある特定交差曲線部の長さが含まれ、
前記位置特定部は、前記特定交差曲線部の位置を特定し、
前記表示制御部は、前記第1特徴点の位置と前記特定交差曲線部の位置を用いて、前記特定交差曲線部の長さを前記撮像画像上に表示する請求項1ないし3いずれか1項記載の内視鏡装置。 - 前記計測補助光には、2つの前記第1特徴線の間に、前記第1特徴線と異なる複数の第2特徴線が含まれ、
前記特定交差曲線部は、前記第2特徴線によって前記交差曲線上に前記第1特徴点よりも小さく形成される複数の第2特徴点からなり、
前記位置特定部は、前記撮像画像に含まれる前記複数の第2特徴点から、前記特定交差曲線部の位置を特定する請求項4記載の内視鏡装置。 - 前記計測情報が複数ある場合において、前記撮像画像上に表示する計測情報として、複数の計測情報のうちのいずれか、又は、複数の計測情報のうち2以上を組み合わせたものに切り替えるための計測情報切替部を有する請求項1記載の内視鏡装置。
- 前記撮像画像の静止画を取得するための静止画取得指示を行う静止画取得指示部を有し、
前記静止画取得指示が行われた場合には、前記計測情報も合わせて保存される請求項1ないし6いずれか1項記載の内視鏡装置。 - 前記被写体を照明するための照明光を発する第1光源部を有し、
前記計測補助光出射部は、前記第1光源部とは独立して設けられる第2光源部と、前記第2光源部から発せられた光から、前記計測補助光を得るための計測補助用光学素子を有する請求項1ないし7いずれか1項記載の内視鏡装置。 - 前記計測補助光出射部は、前記撮像素子の光軸と前記計測補助光の光軸を交差させた状態で、前記計測補助光を前記被写体に向けて出射するための特定光学部材を有する請求項8記載の内視鏡装置。
- 前記特定光学部材には反射防止部が設けられる請求項9記載の内視鏡装置。
- 前記計測補助光出射部は、前記撮像素子の光軸と前記計測補助光の光軸を交差させた状態で、前記計測補助光を前記被写体に向けて出射するための計測補助用スリットを有する請求項8記載の内視鏡装置。
- 前記第2光源部はレーザー光源である請求項8ないし11のうちいずれか1項記載の内視鏡装置。
- 前記第2光源部から発せられる光の波長は、495nm以上570nm以下である請求項12記載の内視鏡装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018127445A JP2020005745A (ja) | 2018-07-04 | 2018-07-04 | 内視鏡装置 |
| EP19183632.9A EP3590408B1 (en) | 2018-07-04 | 2019-07-01 | Endoscope apparatus |
| US16/459,595 US11399707B2 (en) | 2018-07-04 | 2019-07-01 | Endoscope apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018127445A JP2020005745A (ja) | 2018-07-04 | 2018-07-04 | 内視鏡装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020005745A true JP2020005745A (ja) | 2020-01-16 |
Family
ID=67137837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018127445A Pending JP2020005745A (ja) | 2018-07-04 | 2018-07-04 | 内視鏡装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11399707B2 (ja) |
| EP (1) | EP3590408B1 (ja) |
| JP (1) | JP2020005745A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115564825A (zh) * | 2021-06-17 | 2023-01-03 | 珠海原妙医学科技股份有限公司 | 内视镜图像定位方法 |
| JP7741004B2 (ja) * | 2022-02-01 | 2025-09-17 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0313805A (ja) * | 1989-06-12 | 1991-01-22 | Welch Allyn Inc | 物体の内部観察方法とその装置 |
| JPH07136101A (ja) * | 1993-11-16 | 1995-05-30 | Sony Corp | 計測機能付き内視鏡 |
| JP2005279028A (ja) * | 2004-03-30 | 2005-10-13 | Hamamatsu Univ School Of Medicine | 内視鏡 |
| JP2011234871A (ja) * | 2010-05-10 | 2011-11-24 | Olympus Corp | 内視鏡システム |
| JP2012147857A (ja) * | 2011-01-17 | 2012-08-09 | Olympus Medical Systems Corp | 画像処理装置 |
| JP2015531271A (ja) * | 2012-09-14 | 2015-11-02 | ソニー株式会社 | 外科用画像処理システム、外科用画像処理方法、プログラム、コンピュータ可読記録媒体、医用画像処理装置、および画像処理検査装置 |
| JP2017508529A (ja) * | 2014-03-02 | 2017-03-30 | ブイ.ティー.エム.(バーチャル テープ メジャー)テクノロジーズ リミテッド | 内視鏡測定システム及び方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03231622A (ja) | 1990-02-06 | 1991-10-15 | Olympus Optical Co Ltd | 内視鏡装置 |
| US5436655A (en) * | 1991-08-09 | 1995-07-25 | Olympus Optical Co., Ltd. | Endoscope apparatus for three dimensional measurement for scanning spot light to execute three dimensional measurement |
| JP2013005830A (ja) | 2011-06-22 | 2013-01-10 | Fujifilm Corp | 内視鏡システム、プロセッサ装置及び撮影距離測定方法 |
| WO2015151098A2 (en) * | 2014-04-02 | 2015-10-08 | M.S.T. Medical Surgery Technologies Ltd. | An articulated structured light based-laparoscope |
| US9261356B2 (en) * | 2014-07-03 | 2016-02-16 | Align Technology, Inc. | Confocal surface topography measurement with fixed focal positions |
| WO2017003650A1 (en) * | 2015-06-29 | 2017-01-05 | General Electric Company | Method and system for detecting known measurable object features |
| JP6898425B2 (ja) | 2017-03-03 | 2021-07-07 | 富士フイルム株式会社 | 計測支援装置、内視鏡システム、及び内視鏡システムのプロセッサ |
| CN110418596B (zh) * | 2017-03-28 | 2021-12-24 | 富士胶片株式会社 | 测量辅助装置、内窥镜系统及处理器 |
| WO2018230099A1 (ja) | 2017-06-15 | 2018-12-20 | オリンパス株式会社 | 内視鏡システム、内視鏡システムの作動方法 |
-
2018
- 2018-07-04 JP JP2018127445A patent/JP2020005745A/ja active Pending
-
2019
- 2019-07-01 EP EP19183632.9A patent/EP3590408B1/en active Active
- 2019-07-01 US US16/459,595 patent/US11399707B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0313805A (ja) * | 1989-06-12 | 1991-01-22 | Welch Allyn Inc | 物体の内部観察方法とその装置 |
| JPH07136101A (ja) * | 1993-11-16 | 1995-05-30 | Sony Corp | 計測機能付き内視鏡 |
| JP2005279028A (ja) * | 2004-03-30 | 2005-10-13 | Hamamatsu Univ School Of Medicine | 内視鏡 |
| JP2011234871A (ja) * | 2010-05-10 | 2011-11-24 | Olympus Corp | 内視鏡システム |
| JP2012147857A (ja) * | 2011-01-17 | 2012-08-09 | Olympus Medical Systems Corp | 画像処理装置 |
| JP2015531271A (ja) * | 2012-09-14 | 2015-11-02 | ソニー株式会社 | 外科用画像処理システム、外科用画像処理方法、プログラム、コンピュータ可読記録媒体、医用画像処理装置、および画像処理検査装置 |
| JP2017508529A (ja) * | 2014-03-02 | 2017-03-30 | ブイ.ティー.エム.(バーチャル テープ メジャー)テクノロジーズ リミテッド | 内視鏡測定システム及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3590408B1 (en) | 2023-07-19 |
| US20200008661A1 (en) | 2020-01-09 |
| EP3590408A1 (en) | 2020-01-08 |
| US11399707B2 (en) | 2022-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7115897B2 (ja) | 内視鏡装置 | |
| EP3586719B1 (en) | Endoscope apparatus | |
| EP3705023B1 (en) | Endoscope apparatus, calibration device, and calibration method | |
| US12471804B2 (en) | Endoscope apparatus, method of operating the same, and non-transitory computer readable medium | |
| JP7167352B2 (ja) | 内視鏡システム及びその作動方法 | |
| US11399707B2 (en) | Endoscope apparatus | |
| CN114286641B (zh) | 内窥镜装置及其工作方法以及计算机可读介质 | |
| US11957316B2 (en) | Endoscope apparatus | |
| EP3698714B1 (en) | Endoscope apparatus | |
| JP7116264B2 (ja) | 内視鏡システム及びその作動方法 | |
| US12133626B2 (en) | Endoscope system and endoscope system operation method | |
| WO2021039719A1 (ja) | 内視鏡 | |
| JP2020014807A (ja) | 内視鏡装置及びその作動方法並び内視鏡装置用プログラム | |
| JP2020014808A (ja) | 内視鏡装置及びその作動方法並び内視鏡装置用プログラム | |
| JP2020151250A (ja) | 内視鏡装置及びその作動方法並びに内視鏡装置用プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210413 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210601 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210706 |