JP2020006834A - 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム - Google Patents
制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム Download PDFInfo
- Publication number
- JP2020006834A JP2020006834A JP2018130244A JP2018130244A JP2020006834A JP 2020006834 A JP2020006834 A JP 2020006834A JP 2018130244 A JP2018130244 A JP 2018130244A JP 2018130244 A JP2018130244 A JP 2018130244A JP 2020006834 A JP2020006834 A JP 2020006834A
- Authority
- JP
- Japan
- Prior art keywords
- control
- evaluation
- unit
- output
- learning model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/20—Cycle computers as cycle accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
- B62J50/20—Information-providing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
- B62J50/20—Information-providing devices
- B62J50/21—Information-providing devices intended to provide information to rider or passenger
- B62J50/22—Information-providing devices intended to provide information to rider or passenger electronic, e.g. displays
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/092—Reinforcement learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/174—Facial expression recognition
- G06V40/175—Static expression
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Mathematical Physics (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Chemical & Material Sciences (AREA)
- Computational Linguistics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Combustion & Propulsion (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Feedback Control In General (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
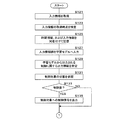
【解決手段】制御データ作成装置は、人力駆動車の走行に関する入力情報を取得する取得部と、前記取得部が取得した入力情報に基づいて前記人力駆動車のコンポーネントの制御に関する出力情報を出力する、学習モデルを学習アルゴリズムによって作成する作成部と、前記学習モデルから出力された出力情報を評価する評価部とを備え、前記作成部は、前記評価部の評価と、前記出力情報の出力に対応する入力情報と、前記出力情報とを含む教師データに基づいて前記学習モデルを更新する。
【選択図】図4
Description
このため、走行に関する測定値を含む多数の入力情報に基づき、閾値では判定しきれない状況に応じたコンポーネント制御をより最適化させることができ、乗り手に違和感を生じさせにくい制御が実現できる。
このため、スムーズとなるようにコンポーネント制御が最適化され、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手の操作に適合した自動制御が実現できる。
このため、走行に関する測定値を含む多数の入力情報に基づき、閾値では判定しきれない状況に応じたコンポーネント制御をより最適化させることができ、乗り手に違和感を生じさせにくい制御が実現できる。
このため、乗り手の嗜好に適合した自動制御が実現できる。
このため、走行に関する測定値を含む多数の入力情報に基づき、閾値では判定しきれない状況に応じたコンポーネント制御をより最適化させることができ、乗り手に違和感を生じさせにくい制御が実現できる。
このため、走行に関する測定値を含む多数の入力情報に基づき、閾値では判定しきれない状況に応じたコンポーネント制御をより最適化させることができ、乗り手に違和感を生じさせにくい制御が実現できる。
このため、走行に関する測定値を含む多数の入力情報に基づき、閾値では判定しきれない状況に応じたコンポーネント制御をより最適化させることができ、乗り手に違和感を生じさせにくい制御が実現できる。
図1は、第1実施形態の制御データ作成装置1が適用される人力駆動車Aの側面図である。人力駆動車Aは、電気エネルギーを用いて人力駆動車Aの推進をアシストするアシスト機構Cを含むロードバイクである。人力駆動車Aの構成は、任意に変更可能である。第1例では、人力駆動車Aはアシスト機構Cを含まない。第2例では、人力駆動車Aの種類は、シティサイクル、マウンテンバイク、または、クロスバイクである。第3例では、人力駆動車Aは、第1例および第2例の特徴を含む。
図6は、第2実施形態における制御ユニット100の内部構成を示すブロック図である。第2実施形態における人力駆動車Aおよび制御ユニット100の構成は、以下に説明する記憶部および処理の詳細以外は第1実施形態と同様であるから、共通する構成に同一の符号を付して詳細な説明を省略する。第2実施形態において制御ユニット100の記憶部12は、異なる時点で時系列に取得した複数の入力情報を逐次一時的に記憶する。記憶部12は具体的には、人力駆動車Aに設けられたセンサ群S1−S5,S61−S63,S7,S8から入出力部14によって入力した入力情報を時間情報と共に複数サンプリング周期分記憶する。記憶部12は、複数サンプリング周期分の記憶領域を用いて巡回的に入力情報を記憶し、古い入力情報に自動的に上書きして記憶する。
第3実施形態では、制御ユニット100に代替して、ユーザの端末装置にて学習モデルの作成およびコンポーネント制御処理を実行する。図9は、制御システム200の構成を示すブロック図である。制御システム200は、端末装置2と制御ユニット100とを含む。第3実施形態における制御ユニット100は、制御部11、記憶部12、入出力部14および通信部16を含む。第3実施形態における制御ユニット100の構成部の内、第1実施形態および第2実施形態における制御ユニット100と共通する構成には同一の符号を付して詳細な説明を省略する。
Claims (15)
- 人力駆動車の走行に関する入力情報を取得する取得部と、
前記取得部が取得した入力情報に基づいて前記人力駆動車のコンポーネントの制御に関する出力情報を出力する、学習モデルを学習アルゴリズムによって作成する作成部と、
前記学習モデルから出力された出力情報を評価する評価部と
を備え、
前記作成部は、前記評価部の評価と、前記出力情報の出力に対応する入力情報と、前記出力情報とを含む教師データに基づいて前記学習モデルを更新する、制御データ作成装置。 - 前記評価部は、前記学習モデルから出力された出力情報によるコンポーネントの制御がスムーズであったか否かを判断し、スムーズであった場合に評価を向上させる、請求項1に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車の駆動機構に掛かるトルクを検知し、前記トルクに応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車の駆動機構に掛かるトルクを検知し、前記トルクの変動に応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車の姿勢を検知し、前記人力駆動車の姿勢に応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車の振動を検知し、前記振動に応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車のチェーンテンションを測定し、前記チェーンテンションに応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記評価部は、前記制御の際の前記人力駆動車のユーザの姿勢を検知し、前記ユーザの姿勢に応じてスムーズであったか否かを判断する、請求項2に記載の制御データ作成装置。
- 前記作成部は、前記評価部の評価の度合いが高い、または低いほど、大きい重みを付与して前記学習モデルを更新する、請求項1〜8のいずれか一項に記載の制御データ作成装置。
- 前記出力情報に関する指定操作を受け付ける操作部を備え、
前記取得部は、時系列に複数の入力情報を逐次一時記憶する記憶部を備え、
前記作成部は、前記操作部にて指定操作を受け付けた場合、前記指定操作が行われたタイミングの前後に取得された複数の入力情報を入力データとし、前記入力データと前記操作部での操作内容とにより前記学習モデルを更新する、請求項1〜9のいずれか一項に記載の制御データ作成装置。 - 人力駆動車の走行に関する入力情報を入力として、前記人力駆動車のコンポーネントの制御に関する出力情報を出力するべく学習アルゴリズムにより作成された学習モデルと、
前記入力情報を取得する取得部と、
前記取得部が取得した入力情報を前記学習モデルに入力することにより出力される出力情報に基づき前記コンポーネントを制御する制御部と、
前記制御部による制御内容を評価する評価部と、
前記評価部の評価と、前記評価に対応する入力情報と、評価対象の制御内容とを含む教師データに基づいて前記学習モデルを更新する、コンポーネント制御装置。 - 前記評価部は、前記制御部による制御内容の評価を受け付ける評価受付部を備え、
前記評価受付部により評価を受け付けた場合、前記評価が受け付けられたタイミングの前後に取得された複数の入力情報と、前記制御内容と、前記評価受付部で受け付けた評価とを含む教師データに基づいて前記学習モデルを更新する、請求項11に記載のコンポーネント制御装置。 - 人力駆動車の走行に関する入力情報を取得し、
取得した入力情報を入力として、前記人力駆動車のコンポーネントの制御に関する出力情報を出力する学習モデルを学習アルゴリズムによって作成し、
前記学習モデルから出力された出力情報を評価し、
評価と、前記出力情報の出力に対応する入力情報と、評価対象の出力情報とを含む教師データに基づいて前記学習モデルを更新する制御データ作成方法。 - 人力駆動車の走行に関する入力情報を取得し、
前記入力情報を入力として、前記人力駆動車のコンポーネントの制御に関する出力情報を出力するべく学習アルゴリズムにより作成された学習モデルに、取得された入力情報を入力することにより出力される出力情報を特定し、
特定した出力情報に基づき前記コンポーネントを制御し、
制御内容を評価し、
評価と、前記評価に対応する入力情報と、評価対象の制御内容とを含む教師データに基づいて前記学習モデルを更新する、コンポーネント制御方法。 - 人力駆動車の走行に関する入力情報を取得し、
取得した入力情報を入力として、前記人力駆動車のコンポーネントの制御に関する出力情報を出力する学習モデルを学習アルゴリズムによって作成し、
前記学習モデルから出力された出力情報を評価し、
評価と、前記出力情報の出力に対応する入力情報と、評価対象の出力情報とを含む教師データに基づいて前記学習モデルを更新する
処理を、コンピュータに実行させるコンピュータプログラム。
Priority Applications (18)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130244A JP6985217B2 (ja) | 2018-07-09 | 2018-07-09 | 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム |
| US16/453,319 US11521117B2 (en) | 2018-07-09 | 2019-06-26 | Control data creation device, component control device, control data creation method, component control method and computer program |
| US16/503,584 US11731723B2 (en) | 2018-07-09 | 2019-07-04 | Rider recognition device for human-powered vehicle and control system of human-powered vehicle |
| US16/503,586 US12288430B2 (en) | 2018-07-09 | 2019-07-04 | Information processing device |
| US16/503,582 US12320660B2 (en) | 2018-07-09 | 2019-07-04 | Information processing device |
| DE102019118280.8A DE102019118280A1 (de) | 2018-07-09 | 2019-07-05 | Fahrererkennungsvorrichtung für ein mit Menschenkraft angetriebenes Fahrzeug und Steuersystem für ein mit Menschenkraft angetriebenes Fahrzeug |
| DE102019118279.4A DE102019118279A1 (de) | 2018-07-09 | 2019-07-05 | Informationsverarbeitungsvorrichtung |
| DE102019118277.8A DE102019118277A1 (de) | 2018-07-09 | 2019-07-05 | Human-powered vehicle control device, electronic device and human-powered vehicle control system |
| DE102019118274.3A DE102019118274A1 (de) | 2018-07-09 | 2019-07-05 | Elektronische Vorrichtung und mit Menschenkraft angetriebenes Fahrzeug |
| DE102019118273.5A DE102019118273A1 (de) | 2018-07-09 | 2019-07-05 | Informationsverarbeitungsvorrichtung |
| DE102019118281.6A DE102019118281A1 (de) | 2018-07-09 | 2019-07-05 | Erzeugungsvorrichtung, Komponentensteuervorrichtung, Erzeugungsverfahren, Komponentensteuerverfahren, Computerprogramm |
| DE102019118282.4A DE102019118282A1 (de) | 2018-07-09 | 2019-07-05 | Komponente eines mit Menschenkraft angetriebenen Fahrzeugs, mobile elektronische Vorrichtung und Ausrüstung für ein mit Menschenkraft angetriebenes Fahrzeug |
| DE102019118278.6A DE102019118278A1 (de) | 2018-07-09 | 2019-07-05 | Steuerdatenerzeugungsvorrichtung, Komponentensteuervorrichtung, Steuerdatenerzeugungsverfahren, Komponentensteuerverfahren und Computerprogramm |
| DE102019118275.1A DE102019118275A1 (de) | 2018-07-09 | 2019-07-05 | Erzeugungsvorrichtung, Komponentensteuervorrichtung, Erzeugungsverfahren, Komponentensteuerverfahren, Computerprogramm und Lernmodell |
| US16/505,570 US11527980B2 (en) | 2018-07-09 | 2019-07-08 | Electronic device and human-powered vehicle system |
| US16/505,578 US11527981B2 (en) | 2018-07-09 | 2019-07-08 | Human-powered vehicle control device, electronic device, and human-powered vehicle control system |
| US16/505,560 US11597470B2 (en) | 2018-07-09 | 2019-07-08 | Human-powered vehicle component, mobile electronic device, and equipment for human-powered vehicle |
| US17/692,628 US11912371B2 (en) | 2018-07-09 | 2022-03-11 | Human-powered vehicle component, mobile electronic device, and equipment for human-powered vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130244A JP6985217B2 (ja) | 2018-07-09 | 2018-07-09 | 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020006834A true JP2020006834A (ja) | 2020-01-16 |
| JP6985217B2 JP6985217B2 (ja) | 2021-12-22 |
Family
ID=69102199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018130244A Active JP6985217B2 (ja) | 2018-07-09 | 2018-07-09 | 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11521117B2 (ja) |
| JP (1) | JP6985217B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022019162A (ja) * | 2020-07-17 | 2022-01-27 | トヨタ自動車株式会社 | 自動変速機の油圧の学習方法、自動変速機の制御装置、自動変速機の制御システム、車両用制御装置および車両用学習装置 |
| JP2023151357A (ja) * | 2022-03-31 | 2023-10-16 | 株式会社シマノ | 人力駆動車用制御装置、学習方法、人力駆動車の制御方法、およびコンピュータプログラム |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11530015B2 (en) * | 2019-02-15 | 2022-12-20 | Sram, Llc | Bicycle control system |
| IT202000005530A1 (it) * | 2020-03-16 | 2021-09-16 | Motocicli Italiani S R L | Sistema di assistenza alla pedalata per bicicletta elettrica e relativa bicicletta |
| US20220161890A1 (en) * | 2020-11-20 | 2022-05-26 | Praxis Works LLC | Motor controller for electric bicycles |
| JP7491403B2 (ja) | 2020-11-25 | 2024-05-28 | 日本電気株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| DE102021130990A1 (de) * | 2021-11-25 | 2023-05-25 | Shimano Inc. | Motorisierte komponente und steuersystem für ein vom menschen angetriebenes fahrzeug |
| CN115042639B (zh) * | 2022-06-27 | 2025-07-22 | 深圳哲轮科技有限公司 | 一种助力车的助力调节方法、装置、电子设备及介质 |
| EP4410651A1 (en) * | 2023-02-06 | 2024-08-07 | MAHLE International GmbH | Method for adapting a power assistance provided by a drive motor of an electrically driveable or driven bicycle, method for providing pre-trained evaluation algorithms, assistance system for a bicycle and bicycle having such an assistance system |
| US12246747B2 (en) * | 2023-05-31 | 2025-03-11 | Plusai, Inc. | Adaptive and fuel efficient planning and control |
| US12384213B2 (en) * | 2023-08-25 | 2025-08-12 | Fox Factory, Inc. | Hot-start suspension tune |
| JP2025043417A (ja) * | 2023-09-19 | 2025-04-01 | カワサキモータース株式会社 | 鞍乗型乗物の挙動推定装置及び挙動推定方法 |
| TWI885891B (zh) * | 2024-05-06 | 2025-06-01 | 宏碁股份有限公司 | 電動輔助自行車的助力調整方法與系統 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH023756A (ja) * | 1988-06-17 | 1990-01-09 | Nissan Motor Co Ltd | 車両の自動変速機の変速制御装置 |
| JPH05203025A (ja) * | 1992-01-24 | 1993-08-10 | Jatco Corp | 自動変速機の変速制御装置 |
| JPH05296323A (ja) * | 1992-04-17 | 1993-11-09 | Toyota Motor Corp | 自動変速機のタイアップ判定装置、及びその制御装置 |
| US6047230A (en) * | 1997-02-27 | 2000-04-04 | Spencer; Marc D. | Automatic bicycle transmission |
| JP2007272361A (ja) * | 2006-03-30 | 2007-10-18 | Hitachi Ltd | プラントの制御装置 |
| JP2009113717A (ja) * | 2007-11-08 | 2009-05-28 | Fuji Heavy Ind Ltd | 状態推定システム |
| US20160288877A1 (en) * | 2015-04-01 | 2016-10-06 | Wick Werks, LLC | Bicycle derailleur with automatic alignment, and methods for automatic derailleur alignment |
| CN106896723A (zh) * | 2017-03-31 | 2017-06-27 | 浙江大学 | 一种自行车的智能自动变速控制系统 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9676441B2 (en) | 2013-11-12 | 2017-06-13 | Giant Manufacturing Co. Ltd | Automatic shock absorber system for bicycle |
| EP2979970B1 (en) | 2014-08-01 | 2017-09-13 | Campagnolo S.R.L. | Bicycle electronic gearshift system and related method |
-
2018
- 2018-07-09 JP JP2018130244A patent/JP6985217B2/ja active Active
-
2019
- 2019-06-26 US US16/453,319 patent/US11521117B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH023756A (ja) * | 1988-06-17 | 1990-01-09 | Nissan Motor Co Ltd | 車両の自動変速機の変速制御装置 |
| JPH05203025A (ja) * | 1992-01-24 | 1993-08-10 | Jatco Corp | 自動変速機の変速制御装置 |
| JPH05296323A (ja) * | 1992-04-17 | 1993-11-09 | Toyota Motor Corp | 自動変速機のタイアップ判定装置、及びその制御装置 |
| US6047230A (en) * | 1997-02-27 | 2000-04-04 | Spencer; Marc D. | Automatic bicycle transmission |
| JP2007272361A (ja) * | 2006-03-30 | 2007-10-18 | Hitachi Ltd | プラントの制御装置 |
| JP2009113717A (ja) * | 2007-11-08 | 2009-05-28 | Fuji Heavy Ind Ltd | 状態推定システム |
| US20160288877A1 (en) * | 2015-04-01 | 2016-10-06 | Wick Werks, LLC | Bicycle derailleur with automatic alignment, and methods for automatic derailleur alignment |
| CN106896723A (zh) * | 2017-03-31 | 2017-06-27 | 浙江大学 | 一种自行车的智能自动变速控制系统 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022019162A (ja) * | 2020-07-17 | 2022-01-27 | トヨタ自動車株式会社 | 自動変速機の油圧の学習方法、自動変速機の制御装置、自動変速機の制御システム、車両用制御装置および車両用学習装置 |
| JP2023151357A (ja) * | 2022-03-31 | 2023-10-16 | 株式会社シマノ | 人力駆動車用制御装置、学習方法、人力駆動車の制御方法、およびコンピュータプログラム |
| JP7801933B2 (ja) | 2022-03-31 | 2026-01-19 | 株式会社シマノ | 人力駆動車用制御装置、学習方法、人力駆動車の制御方法、およびコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200012964A1 (en) | 2020-01-09 |
| US11521117B2 (en) | 2022-12-06 |
| JP6985217B2 (ja) | 2021-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6985217B2 (ja) | 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム | |
| JP7792372B2 (ja) | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 | |
| JP7007244B2 (ja) | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、コンピュータプログラムおよび学習モデル | |
| JP7324632B2 (ja) | 出力装置、学習モデルの生成方法、およびコンピュータプログラム | |
| JP6989452B2 (ja) | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、およびコンピュータプログラム | |
| JP7193230B2 (ja) | 人力駆動車両用制御装置 | |
| US11597470B2 (en) | Human-powered vehicle component, mobile electronic device, and equipment for human-powered vehicle | |
| TWI814155B (zh) | 電動輔助自行車的輔助力控制系統與方法 | |
| US11527980B2 (en) | Electronic device and human-powered vehicle system | |
| JP2022176850A (ja) | 人力駆動車用の制御装置 | |
| DE102019118278A1 (de) | Steuerdatenerzeugungsvorrichtung, Komponentensteuervorrichtung, Steuerdatenerzeugungsverfahren, Komponentensteuerverfahren und Computerprogramm | |
| US20220242521A1 (en) | Electric motor-assisted bicycle and motor control apparatus | |
| JP7840143B2 (ja) | 人力駆動車情報処理装置、人力駆動車情報処理方法、人力駆動車情報処理システム、およびコンピュータプログラム | |
| JP7457458B2 (ja) | 出力装置、コンピュータプログラム、および記憶媒体 | |
| JP7337510B2 (ja) | 出力装置、学習モデルの生成方法、コンピュータプログラム、および記憶媒体 | |
| US20250368285A1 (en) | System for predicting travel of human-powered vehicle and system for generating model for predicting travel of human-powered vehicle | |
| JP7514597B2 (ja) | 情報処理装置 | |
| US12320660B2 (en) | Information processing device | |
| US20230182858A1 (en) | Human-powered vehicle control device, learning model creation method, learning model, human-powered vehicle control method and computer program | |
| JP7356230B2 (ja) | 制御システム | |
| EP3389030A1 (en) | Device for presenting onomatopoeia regarding evaluation result for user action | |
| JP2025081129A (ja) | 人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラム | |
| CN120553015A (zh) | 人力驱动车控制装置、人力驱动车控制方法以及程序产品 | |
| CN121493150A (zh) | 助力自行车的控制方法、装置、设备以及计算机可读介质 | |
| CN121053962A (zh) | 跨乘式车辆相关交互式人类语言信息输出系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6985217 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |