JP2020007117A - 出荷支援システム、出荷支援方法および出荷支援プログラム - Google Patents
出荷支援システム、出荷支援方法および出荷支援プログラム Download PDFInfo
- Publication number
- JP2020007117A JP2020007117A JP2018130758A JP2018130758A JP2020007117A JP 2020007117 A JP2020007117 A JP 2020007117A JP 2018130758 A JP2018130758 A JP 2018130758A JP 2018130758 A JP2018130758 A JP 2018130758A JP 2020007117 A JP2020007117 A JP 2020007117A
- Authority
- JP
- Japan
- Prior art keywords
- section
- target container
- information
- product
- shipping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 24
- 239000003550 marker Substances 0.000 claims abstract description 65
- 238000005259 measurement Methods 0.000 claims abstract description 46
- 238000005192 partition Methods 0.000 claims description 24
- 238000012545 processing Methods 0.000 claims description 16
- 230000001678 irradiating effect Effects 0.000 claims 1
- 230000032258 transport Effects 0.000 abstract description 47
- 238000010586 diagram Methods 0.000 abstract description 19
- 230000008569 process Effects 0.000 description 16
- 238000005516 engineering process Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 3
- 230000004308 accommodation Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images






Landscapes
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【課題】コンテナ内の商品の収容力を向上させ、コンテナに収容された商品を確実に把握可能とする技術を提供する。【解決手段】出荷支援システムは、複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送する搬送制御手段と、作業位置までの搬送経路上の計測位置において、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取る読取手段と、マーカに格納された情報に基づいて、出荷対象の商品が対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する出力手段と、を備える。【選択図】図11
Description
本発明は、出荷支援システム、出荷支援方法および出荷支援プログラムに関する。
E−コマースにおける取扱商品の増大により、物流倉庫内における在庫管理の効率化が望まれている。在庫商品はコンテナに収容して保管されるが、1コンテナに1商品を収容した場合、小さな商品ではコンテナ内に無駄なスペースが発生し、倉庫内の収容量が制限される。また、コンテナ数が増加するため、コンテナを搬送するコンベアの渋滞を招くおそれがある。したがって、1コンテナに複数商品を収容することが望ましい。1コンテナに複数商品を収容するため、コンテナ内の収納空間を複数の区画に分割し、区画のそれぞれを識別する複数の区画識別ラベルを取り付けて管理する技術が提案されている(例えば、特許文献1)。
顧客から商品の注文を受け付けると、出荷作業者は、在庫商品を保管するコンテナから出荷対象の商品を取り出して、出荷用のコンテナに収集するピッキング作業を行う。コンテナ内を複数の区画に仕切ってそれぞれに在庫商品を収容する場合、出荷対象の商品が、どの区画に収容されているかが正しく認識されなければ、出荷作業者は、間違った商品をピッキングするおそれがある。
本件開示の技術の一側面は、上記の事情に鑑み、コンテナ内の商品の収容力を向上させ、コンテナに収容された商品を確実に把握可能とする技術を提供することである。
本件開示の技術の一側面に係る出荷支援システムは、複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送する搬送制御手段と、作業位置までの搬送経路上の計測位置において、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取る読取手段と、マーカに格納された情報に基づいて、出荷対象の商品が対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する出力手段と、を備える。
上記の出荷支援システムは、コンテナ内を複数の区画に仕切って在庫商品を収容することができるため、コンテナ内の商品の収容力は向上する。また、出荷対象の商品がどの区画に含まれるかをより確実に把握可能となる。マーカは、区画内に収容される商品の情報を格納する情報記憶媒体である。マーカは、例えば、バーコード(1次元コード)、2次元コード、3次元コード、ICタグ、RFID(Radio Frequency Identifier)タグである。また、マーカは、例えば、蛍光塗料の塗布によって発光し、光通信によって読取り可能に情報を記憶するものであってもよい。
また、出荷支援システムは、計測位置において、対象コンテナの位置および対象コンテナ内の各区画に取り付けられたマーカの位置を計測し、マーカの位置に基づいて、各区画
の配置を特定する計測手段をさらに備えるものであってもよい。マーカの位置は、対象コンテナに対する相対位置であってもよく、各区画に取り付けられたマーカ同士の相対的な位置であってもよい。各区画の配置は、コンテナ内がどのように仕切られているかであって、計測手段によって計測された位置情報によって特定することができる。このような出荷支援システムは、マーカの位置に基づいて各区画の配置を特定するため、出荷対象の商品がどの区画に含まれるかをより確実に把握可能となる。
の配置を特定する計測手段をさらに備えるものであってもよい。マーカの位置は、対象コンテナに対する相対位置であってもよく、各区画に取り付けられたマーカ同士の相対的な位置であってもよい。各区画の配置は、コンテナ内がどのように仕切られているかであって、計測手段によって計測された位置情報によって特定することができる。このような出荷支援システムは、マーカの位置に基づいて各区画の配置を特定するため、出荷対象の商品がどの区画に含まれるかをより確実に把握可能となる。
また、搬送制御手段は、作業位置において、出荷作業を作業者が行うか、ロボットが行うかを判定するものであってもよい。このような出荷支援システムは、作業位置での出荷作業が人によって行われるかロボットによって行われるかに応じて、区画の情報の出力内容を柔軟に変更することができる。ロボットは、対象コンテナ内の出荷対象の商品を、出荷用のコンテナに移す作業を行うことができる設備である。
また、出力手段は、出荷作業を作業者が行うと判定された場合、出荷対象の商品を含む区画を、光で照射することにより作業者に示すものであってもよい。このような出荷支援システムであれば、作業者は、作業位置に到着した対象コンテナを見れば、出荷対象の商品を含む区画を認識することができるため、出荷対象の商品を確実に把握することができる。
また、出力手段は、出荷作業を作業者が行うと判定された場合、対象コンテナ内の各区画の配置および出荷対象の商品が収容されている区画を示す画像を作業者に提示するものであってもよい。このような出荷支援システムは、作業者に対し、出荷対象の商品が収容されている区画の情報を、視覚的に理解しやすく提示することができる。
また、出力手段は、出荷作業をロボットが行うと判定された場合、対象コンテナ内の各区画の配置に基づいて、出荷対象の商品が収容されている区画の位置情報をロボットに送信するものであってもよい。このような出荷支援システムは、ロボットが出荷作業を行うために用いられる情報を出力することができる。各区画の配置は、予め定義した区画の配置パターンであってもよい。また、各区画の配置は、計測手段によって計測された位置情報によって特定されてもよい。
また、本件開示の技術の一側面に係る出荷支援方法は、コンピュータが、複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送し、作業位置までの搬送経路上の計測位置において、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取り、出荷対象の商品が対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する。
また、本件開示の技術の一側面に係る出荷支援プログラムは、コンピュータに、複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送し、作業位置までの搬送経路上の計測位置において、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取り、出荷対象の商品が対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する、処理を実行させる。
本件開示の技術の一側面によれば、コンテナ内の商品の収容力を向上させ、コンテナに収容された商品を確実に把握可能とすることができる。
以下、実施形態の詳細について、図面を参照しながら説明する。ただし、以下に説明する実施の形態は一例に過ぎず、本開示に係る出荷支援システム、出荷支援方法および出荷支援プログラムを以下に説明する具体的構成に限定するものではない。実施にあたっては、実施形態に応じた具体的構成が適宜採用され、また、種々の改良や変形が行われてよい。
<実施形態>
[システム構成]
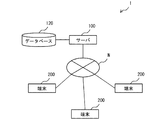
図1は、実施形態に係る出荷支援システムの概略構成図である。図1に示すように、出荷支援システム1は、サーバ100、データベース120、端末200を含む。図1は、3台の端末200に接続される例を示すが、接続される端末200の台数に制限はない。ネットワークNは、例えば、インターネット等の世界規模の公衆パケット通信網であり、WAN(Wide Area Network)やその他の通信網が採用されてもよい。
[システム構成]
図1は、実施形態に係る出荷支援システムの概略構成図である。図1に示すように、出荷支援システム1は、サーバ100、データベース120、端末200を含む。図1は、3台の端末200に接続される例を示すが、接続される端末200の台数に制限はない。ネットワークNは、例えば、インターネット等の世界規模の公衆パケット通信網であり、WAN(Wide Area Network)やその他の通信網が採用されてもよい。
サーバ100は、物流倉庫等において、商品の出荷作業(以下、ピッキング作業とも称する)を管理するためのサーバである。サーバ100は、在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、ピッキング作業を行う作業位置まで搬送する。各コンテナは、複数の区画に仕切られ、区画ごとに在庫商品を収容することができる。コンテナの各区画には、収容される在庫商品の情報を格納するマーカが取り付けられる。作業位置までの搬送経路上には、計測位置が設けられる。サーバ100は、計測位置において、コンテナ内の各区画に取り付けられたマーカを読み取る。サーバ100は、出荷対象の商品が対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する。
データベース120は、出荷対象の商品が、複数に仕切られたコンテナ内のどの区画に収容されているかを示す情報を出力するために用いられる各種情報を格納する。データベース120は、例えば、商品の出荷に関するオーダー情報、コンテナに収容されている商品の在庫情報、出荷支援システム1が管理する設備に関する設備情報、コンテナの区画に関する区画情報を格納する。なお、データベース120は、サーバ100が備える補助記憶装置内に構築されてもよく、サーバ100に接続される他のコンピュータに構築されてもよい。以下、データベース120は、サーバ100が備える補助記憶装置内に構築されるものとして説明する。
端末200は、ピッキングの作業位置に設置されるコンピュータである。端末200は、出荷対象の商品が、複数に仕切られたコンテナ内のどの区画に収容されているかを示す情報を、サーバ100から受信する。端末200は、サーバ100から受信した情報を、
作業位置でピッキングをする作業者に対して提示する。また、端末200は、ピッキング作業をするロボットであってもよい。この場合、端末200(ロボット)は、サーバ100から受信した情報に基づいて、出荷対象の商品をコンテナから取り出すピッキング作業を制御することができる。
作業位置でピッキングをする作業者に対して提示する。また、端末200は、ピッキング作業をするロボットであってもよい。この場合、端末200(ロボット)は、サーバ100から受信した情報に基づいて、出荷対象の商品をコンテナから取り出すピッキング作業を制御することができる。
[ハードウェア構成]
図2は、実施形態に係るサーバ100のハードウェア構成を例示する図である。図2に示すように、サーバ100は、CPU(Central Processing Unit)100a、RAM(Random Access Memory)100b、HDD(Hard Disk Drive)100c、NIC(Network Interface Card)100d、センサ100eを備える。
図2は、実施形態に係るサーバ100のハードウェア構成を例示する図である。図2に示すように、サーバ100は、CPU(Central Processing Unit)100a、RAM(Random Access Memory)100b、HDD(Hard Disk Drive)100c、NIC(Network Interface Card)100d、センサ100eを備える。
CPU100aは、中央演算処理装置であり、RAM100b等に展開された各種プログラムの命令およびデータを処理することで、RAM100b、HDD100c等を制御する。CPU100aは、単一のプロセッサに限定される訳ではなく、マルチプロセッサ構成であってもよい。また、単一のソケットで接続される単一のCPUがマルチコア構成であってもよい。上記各部の少なくとも一部の処理がDSP(Digital Signal Processor)、GPU(Graphics Processing Unit)、数値演算プロセッサ、ベクトルプロセッサ、画像処理プロセッサ等の専用プロセッサ、ASIC(Application Specific Integrated Circuit)などによって提供されてもよい。また、上記各部の少なくとも一部が、FPG
A(Field-Programmable Gate Array)などの専用LSI(Large Scale Integration)、その他のデジタル回路であってもよい。また、上記各部の少なくとも一部にアナログ回路が含まれてもよい。
A(Field-Programmable Gate Array)などの専用LSI(Large Scale Integration)、その他のデジタル回路であってもよい。また、上記各部の少なくとも一部にアナログ回路が含まれてもよい。
RAM100bは、主記憶装置であり、CPU100aによって制御され、各種命令やデータが書き込まれ、読み出される。HDD100cは、不揮発性の補助記憶装置であり、RAM100bにロードされる各種プログラム等、永続性が求められる情報が書き込まれ、読み出される。NIC100dは、ゲートウェイ等を介してインターネットに接続するためのインタフェースである。
センサ100eは、各区画に取り付けられたマーカに格納された情報を読み取るための装置である。センサ100eは、例えば、バーコードリーダー、QRコード(登録商標)リーダー、RFIDリーダーである。センサ100eは、マーカから読み取った情報を、HDD100cまたはデータベース120に格納する。センサ100eは、コンテナを計測する計測位置に設置される。センサ100eは、サーバ100とは別に構成されてもよく、この場合、ネットワークNを介して、サーバ100と接続されればよい。
端末200は、サーバ100と同様に、CPU、RAM、HDD、NICを有するコンピュータである。端末200は、ピッキング作業に使用される情報を表示するための出力装置を有するものであってもよい。出力装置は、例えば、タッチパネル、液晶ディスプレイである。端末200は、出力装置として、出荷対象の商品を含む区画を照射する照射装置を有してもよい。端末200は、例えば、PC(Personal Computer)が想定されるが
、スマートフォンやタブレット等の携帯端末、据置型の情報端末等の各種端末装置が採用されてもよい。また、端末200は、コンテナ内から出荷対象の商品をピッキングするアームを有するロボットが採用されてもよい。
、スマートフォンやタブレット等の携帯端末、据置型の情報端末等の各種端末装置が採用されてもよい。また、端末200は、コンテナ内から出荷対象の商品をピッキングするアームを有するロボットが採用されてもよい。
[機能構成]
図3は、実施形態に係るサーバの機能構成を例示する図である。サーバ100は、機能構成として、搬送制御部111、計測部112、読取部113、出力部114、オーダー情報データベース(DB)121、在庫情報データベース(DB)122、設備情報データベース(DB)123、区画情報データベース(DB)124およびピッキング情報デ
ータベース(DB)125を含む。サーバ100は、HDD100cに記憶されているプログラムが、RAM100bに読み出され、CPU100aによって実行されることで、図3に示す各機能構成を備えるコンピュータとして機能する。
図3は、実施形態に係るサーバの機能構成を例示する図である。サーバ100は、機能構成として、搬送制御部111、計測部112、読取部113、出力部114、オーダー情報データベース(DB)121、在庫情報データベース(DB)122、設備情報データベース(DB)123、区画情報データベース(DB)124およびピッキング情報デ
ータベース(DB)125を含む。サーバ100は、HDD100cに記憶されているプログラムが、RAM100bに読み出され、CPU100aによって実行されることで、図3に示す各機能構成を備えるコンピュータとして機能する。
なお、本実施形態において、サーバ100の備える各機能は、汎用プロセッサであるCPU100aによって実行されるが、これらの機能の一部または全部は、1または複数の専用プロセッサ、ハードウェアの演算回路等によって実行されてもよい。ここで、ハードウェアの演算回路とは、例えば、論理ゲートを組み合わせた加算回路、乗算回路、フリップフロップ等をいう。また、これらの機能の一部または全部は、ネットワークNを介してサーバ100と通信可能な別途のコンピュータにおいて実行されてもよい。
ここで、図4を用いて、サーバ100の備える搬送制御部111、計測部112、読取部113、出力部114の処理について説明する。図4は、各機能構成による出荷支援処理を説明するための図である。なお、図4に示す搬送経路、計測位置、作業位置等の配置は一例であって、配置位置の変更、追加、削除が可能である。
搬送制御部111は、出荷対象の商品を収容する対象コンテナC1を、搬送経路上に設置されたコンベアBによって、所望の位置に搬送する。搬送制御部111は、まず、対象コンテナC1を、計測位置A10まで矢印X1の向きに搬送する。計測位置A10でマーカを読み取った後、搬送制御部111は、対象コンテナC1を矢印X2の向きに搬送する。そして、搬送制御部111は、対応するオーダーのピッキングを行う作業位置まで、矢印X3に沿って、対象コンテナC1を搬送する。
図4の例では、作業位置A21および作業位置A22は、作業者がピッキング作業をする作業位置であり、作業位置A23は、ロボット等の設備がピッキング作業をする作業位置である。各作業位置A21からA23において、作業者またはロボットは、作業位置に到着した対象コンテナC1から、出荷対象の商品を取り出し、ピッキング用コンテナC2に入れる。ピッキング用コンテナC2は、対象コンテナC1とは別の搬送経路(コンベア)を通り、各作業位置A21からA23に搬送される。搬送制御部111は、「搬送制御手段」に相当する。
計測部112は、計測位置A10において、対象コンテナC1の位置を計測する。また、計測部112は、対象コンテナC1内の各区画に取り付けられたマーカの位置に基づいて、区画パターンを特定する。区画パターンは、対象コンテナC1内の区画数、各区画の形状または大きさの情報を含んでもよい。なお、計測位置A10は、図4に示す位置に限られず、対象コンテナC1が各作業位置A21からA23に搬送されるまでの搬送経路上に設けられればよい。また、計測位置A10は、複数個所に設けられてもよい。
計測部112は、例えば、計測位置A10に到着した対象コンテナC1の画像を上面側から撮像し、対象コンテナC1を検出する。次に、計測部112は、対象コンテナC1の撮像画像においてマーカの位置を検出し、対象コンテナC1に対する相対位置を算出することにより、マーカの位置を計測することができる。計測部112は、検出したマーカの数から、対象コンテナC1内の区画数を認識することができる。また、計測部112は、対象コンテナC1に対する各マーカの相対位置に基づいて、対象コンテナC1内がどのように仕切られているかの区画パターンを認識することができる。
また、計測部112は、対象コンテナC1に対する各マーカの相対位置ではなく、マーカ同士の相対位置に基づいて、区画パターンを認識することも可能である。この場合、計測部112は、例えば、基準となるマーカを定め、基準のマーカに対する他のマーカの相対位置を算出すればよい。計測部112は、各マーカの位置関係から、対象コンテナC1
内がどのように仕切られているかの区画パターンを認識することができる。なお、マーカがICタグのように無線通信によって読み書きをする電子タグの場合であっても、計測部112は、位相情報の解析による高精度の電子タグリーダーによって、位置情報の取得が可能である。計測部112は、「計測手段」に相当する。
内がどのように仕切られているかの区画パターンを認識することができる。なお、マーカがICタグのように無線通信によって読み書きをする電子タグの場合であっても、計測部112は、位相情報の解析による高精度の電子タグリーダーによって、位置情報の取得が可能である。計測部112は、「計測手段」に相当する。
ここで、図5により、複数の区画に仕切られ、各区画にマーカが取り付けられた対象コンテナC1の例を説明する。図5は、出荷対象の商品を収容する対象コンテナを例示する平面図である。
図5(A)は、対象コンテナC1を2つの区画に仕切る例である。図5(A)の例では、対象コンテナC1は区画1と区画2とに仕切られる。区画1を囲む壁の上面には、区画1のマーカM11が取り付けられ、区画2を囲む壁の上面には、区画2のマーカM12が取り付けられる。なお、各区画を囲む壁の上面とは、対象コンテナC1がコンベヤBに載置される面(底面)に対向する面とする。マーカは、壁の上面に限られず、壁の外側の側面など、読取部113によって読取可能な位置に取り付けられればよい。ただし、マーカは、区画間を仕切る仕切り板以外に取り付けられることが好ましい。図5(A)の例では、計測部112は、マーカM11が取り付けられた側面およびマーカM12が取り付けられた側面と並行に仕切られた区画パターンであることを認識することができる。
図5(B)は、対象コンテナC1を4つの区画に仕切る例である。図5(B)の例では、対象コンテナC1は区画1から区画4に仕切られる。対象コンテナC1の4隅の上面には、区画1から区画4に対応するマーカM21からM24が取り付けられる。この場合、計測部112は、4隅のマーカが異なる区画に含まれるように、格子状に仕切られた区画パターンであることを認識することができる。各マーカは、対応する区画を特定できれば、4隅以外の場所に取り付けられてもよい。
図5(C)は、対象コンテナC1を6つの区画に仕切る例である。図5(C)の例では、対象コンテナC1は区画1から区画6に仕切られる。対象コンテナC1の4隅の上面には、区画1から区画6に対応するマーカM31からM36が取り付けられる。図5(C)の例では、区画1から区画3は、区画4から区画6よりも大きくなっている。このように各区画の形状、大きさが異なる場合、計測部112は、対象コンテナC1の撮像画像において、仕切りの位置を検出することにより、対象コンテナC1内の各区画の形状、大きさを認識することが可能である。
読取部113は、計測位置A10において、対象コンテナC1を仕切る区画ごとに取り付けられたマーカを読み取る。マーカは、区画内に収容される商品の情報を格納する。商品の情報は、例えば、商品番号、入庫日、収容数量である。読取部113は、「読取手段」に相当する。
出力部114は、搬送制御部111によって、対象コンテナC1が作業位置A21から作業位置A23のいずれかの作業位置まで搬送されると、端末200に、出荷対象の商品が収容される区画の情報を出力する。出力部114は、「出力手段」に相当する。
次に、図6から図10を用いて、データベース120に含まれるオーダー情報データベース121、在庫情報データベース122、設備情報データベース123、区画情報データベース124およびピッキング情報データベース125に格納される情報について説明する。データベース120は、CPU100aによって実行されるデータベース管理システム(Database Management System、DBMS)のプログラムが、HDD100cに記憶されるデータを管理することで構築される。データベース120は、例えば、リレーショナルデータベースである。
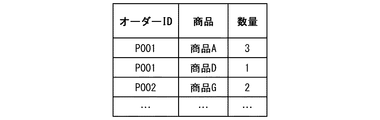
オーダー情報データベース121は、オーダー情報テーブルを有し、顧客からのオーダー情報を格納する。図6は、オーダー情報テーブルの一例を示す図である。図6の例では、オーダー情報テーブルに格納されるレコード1件は、各オーダーに含まれる1つの商品の情報を格納する。1件のオーダーに複数種類の商品が含まれる場合、オーダー情報テーブルは、当該1件のオーダーを、商品ごとに複数のレコードで管理する。
オーダー情報テーブルのレコードは、オーダーID、商品、数量のフィールドを有する。オーダーIDは、顧客からの1件の注文情報を識別するIDである。商品は、オーダーに含まれる商品である。数量は、商品の注文数量である。オーダー情報テーブルは、図6に示すフィールドの他、顧客の氏名、購入金額、支払方法等の商品の注文に関する情報を格納するフィールドを有してもよい。
在庫情報データベース122は、在庫情報テーブルを有し、対象コンテナ内に収容される商品の在庫情報を格納する。図7は、在庫情報テーブルの一例を示す図である。図7の例では、在庫情報テーブルに格納されるレコード1件は、対象コンテナ内の1種類の在庫商品の情報を格納する。
在庫情報テーブルのレコードは、コンテナID、商品、在庫数のフィールドを有する。コンテナIDは、出荷対象の商品を収容する対象コンテナを識別するIDである。商品は、対象コンテナ内に収容される商品である。在庫数は、区画に含まれる在庫商品の在庫数量である。
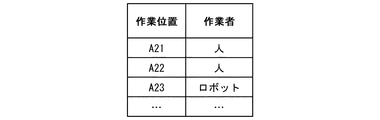
設備情報データベース123は、設備情報テーブルを有し、各作業位置における設備情報を格納する。図8は、設備情報テーブルの一例を示す図である。図8の例では、設備情報テーブルに格納されるレコード1件は、1つの作業位置に関する情報を格納する。
設備情報テーブルのレコードは、作業位置、作業者のフィールドを有する。作業位置は、ピッキング作業が行われる作業位置の識別情報である。作業者は、ピッキング作業の主体が「人」であるか「ロボット」であるかを格納する。
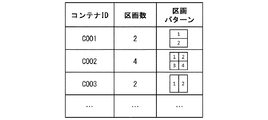
区画情報データベース124は、区画情報テーブルを有し、対象コンテナ内の区画の配置に関する情報を格納する。図9は、区画情報テーブルの一例を示す図である。図9の例では、区画情報テーブルに格納されるレコード1件は、1つのコンテナに関する情報を格納する。
区画情報テーブルのレコードは、コンテナID、区画数、区画パターンのフィールドを有する。コンテナIDは、出荷対象の商品を収容する対象コンテナを識別するIDである。区画数は、対象コンテナ内が何区画に仕切られているかを格納する。区画パターンは、対象コンテナ内がどのような形状に仕切られているかを格納する。区画パターンは、「区画の配置」の一例である。区画情報テーブルは、図9に示すフィールドの他、対象コンテナに対する区画の相対位置を示す位置情報を格納するフィールドを有してもよい。なお、区画情報テーブルに格納される情報は、対象コンテナに取り付けられるマーカに格納されてもよい。
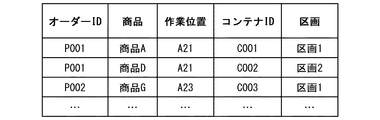
ピッキング情報データベース125は、ピッキング情報テーブルを有し、マーカから読み取った情報に基づいて、出荷対象の商品が対象コンテナ内のどの区画に含まれるかを格納する。出力部114は、ピッキング情報テーブルに格納された情報を端末200に送信することで、出荷対象の商品がどの区画に含まれるかを、作業者またはロボットに通知することができる。図10は、ピッキング情報テーブルの一例を示す図である。図10の例
では、ピッキング情報テーブルに格納されるレコード1件は、オーダーに含まれる1種類の商品の情報を格納する。1件のオーダーに複数種類の商品が含まれる場合、ピッキング情報テーブルは、当該1件のオーダーを、商品ごとに複数のレコードで管理すればよい。
では、ピッキング情報テーブルに格納されるレコード1件は、オーダーに含まれる1種類の商品の情報を格納する。1件のオーダーに複数種類の商品が含まれる場合、ピッキング情報テーブルは、当該1件のオーダーを、商品ごとに複数のレコードで管理すればよい。
ピッキング情報テーブルのレコードは、オーダーID、商品、作業位置、コンテナID、区画のフィールドを有する。オーダーIDおよび商品は、オーダー情報テーブルから取得される情報を格納する。作業位置は、オーダーの対象となっている商品をピッキングする作業位置である。作業位置は、例えば、搬送制御部111により、各作業位置でのピッキング作業の状況に応じて、オーダーごとに設定されてもよい。また、作業位置は、ピッキング対象の商品の形状等に応じて設定されてもよい。オーダー情報に応じて作業位置が予め設定されている場合、搬送制御部111は、オーダー情報とともに作業位置を取得することができる。コンテナID、区画フィールドは、マーカから読み取った情報を格納するフィールドである。コンテナIDは、出荷対象の商品を収容するコンテナのIDである。区画は、出荷対象の商品を含む区画である。
[処理の流れ]
図11は、出荷支援処理の流れを例示するフローチャートである。図11に示す処理の流れは、例えば、サーバ100が、オーダー情報を受信したことを契機に開始される。
図11は、出荷支援処理の流れを例示するフローチャートである。図11に示す処理の流れは、例えば、サーバ100が、オーダー情報を受信したことを契機に開始される。
まず、ステップS11では、搬送制御部111は、オーダー情報を取得する。オーダー情報は、例えば、オーダーID、商品、数量の情報を含む。搬送制御部111は、取得したオーダー情報を図6に示すオーダー情報テーブルに格納する。
ステップS12では、搬送制御部111は、オーダー情報に含まれる出荷対象の商品(以下、オーダー商品と称する)を収容する対象コンテナを計測位置に搬送する。搬送制御部111は、図7に示す在庫情報テーブルを参照して、オーダー商品を収容する対象コンテナを特定することができる。例えば、オーダーIDが「P001」のオーダー(以下、オーダーP001のように称する)に含まれる商品Aは、コンテナIDが「C001」のコンテナ(以下、コンテナC001のように称する)に収容されていることが特定される。この場合、搬送制御部111は、コンテナC001を計測位置に搬送すればよい。
ステップS13では、計測部112は、対象コンテナが計測位置に到着したことを検知する。計測部112は、例えば、計測位置に設置されるセンサ100eから、計測位置で対象コンテナが検知されたことの通知を受信して、対象コンテナの到着を検知することができる。
ステップS14では、計測部112は、対象コンテナの位置を計測する。計測部112は、例えば、対象コンテナを上面から撮像し、撮像画像における対象コンテナを検知する。計測部112は、基準となる点、例えば、対象コンテナの4隅の1点を原点とする座標系を用いて、対象コンテナの位置を計測することができる。
ステップS15では、計測部112は、対象コンテナに取り付けられたマーカの位置を読み取る。計測部112は、読み取ったマーカの数から、対象コンテナ内の区画数を取得することができる。計測部112は、例えば、ステップS14と同じ座標系を用いてマーカの位置を計測することができる。マーカの位置は、対象コンテナに対するマーカの相対位置であってもよく、マーカ同士の相対的な位置であってもよい。
ステップS16では、計測部112は、対象コンテナ内の区画パターンを特定する。区画パターンは、計測部112がステップS15で取得した区画数に応じて、予め定義されたパターンとすることができる。例えば、計測部112は、区画数が2であれば図5(A
)に示す区画パターン、区画数が4であれば図5(B)に示す区画パターン、区画数が6であれば図5(C)に示す区画パターンと定義することが可能である。
)に示す区画パターン、区画数が4であれば図5(B)に示す区画パターン、区画数が6であれば図5(C)に示す区画パターンと定義することが可能である。
また、区画パターンは、図9の区画情報テーブルに例示するように、予め対象コンテナごとに定義されてもよい。この場合、計測部112は、計測位置に到着した対象コンテナのコンテナIDに基づいて、区画パターンを特定すればよい。例えば、計測部112は、計測位置にコンテナC001が到着した場合、区画情報テーブルを参照して、図5(A)と同様の区画パターンで仕切られていることを特定することができる。
ステップS17では、読取部113は、各区画に取り付けられたマーカから、区画内の商品情報を読み取る。例えば、計測位置に、区画1と区画2の2区画に仕切られたコンテナC001が到着した場合、読取部113は、いずれかの区画のマーカから商品情報を読み取る。
ステップS18では、読取部113は、ステップS17で読み取ったマーカに対応する区画がオーダー商品を含むか否かを判定する。読取部113は、当該区画に含まれる商品が、オーダー商品と一致する場合、オーダー商品を含むと判定することができる。当該区画がオーダー商品を含む区画である場合(ステップS18:Yes)、処理はステップS19に進む。この場合、読取部113は、オーダー商品を含む区画およびコンテナIDの情報をピッキング情報テーブルに格納する。当該区画がオーダー商品を含まない場合(ステップS18:No)、処理はステップS17に戻り、読取部113は、次の区画のマーカを読み取る。
例えば、ステップS17において、読取部113が、まず、コンテナC001の区画2のマーカを読み取った場合、区画2は商品Bを含み、オーダー商品である商品Aを含まない。したがって、ステップS18では、区画2はオーダー商品を含まないと判定され、処理はステップS17に戻る。次に、読取部113は、コンテナC001の区画1のマーカを読み取る。区画1は、オーダー商品である商品Aを含む。したがって、ステップS18では、区画1はオーダー商品を含むと判定される。この場合読取部113は、ピッキング情報テーブルにおいて、オーダーP001の商品Aのレコードに、商品Aを含むコンテナC001および区画1の情報を格納する。
ステップS19では、搬送制御部111は、オーダー商品を含む区画が特定された対象コンテナを作業位置に搬送する。搬送制御部111は、例えば、ピッキング情報テーブルを参照して、搬送先の作業位置を特定することができる。
ステップS20では、出力部114は、オーダー商品を含む区画の情報を出力する。出力部114は、例えば、オーダー商品が対象コンテナ内のどの区画に含まれるかの区画情報を、作業位置に設置される端末200に送信する。端末200は、受信した区画情報に基づいて、例えば、オーダー商品を含む区画が光で照射されるように制御することができる。また、端末200は、オーダー商品を含む区画を示す画像を端末200のディスプレイに表示することも可能である。
なお、図11に示すフローチャートでは、コンテナIDに基づいて作業位置を決定する処理、およびマーカを読み取る処理は、計測位置で実行されることが想定されるが、これに限られない。例えば、搬送制御部111は、作業位置が予め設定されている場合、S11においてオーダー情報とともに作業位置を取得するようにしてもよい。また、読取部113は、オーダー商品が対象コンテナ内のどの区画に含まれるかを判定する処理(ステップS17およびステップS18の処理)を、作業位置において実行することも可能である。
[実施形態の作用効果]
上記の実施形態では、出荷支援システム1は、複数に仕切られた各区画に在庫商品を収容する複数のコンテナのうち、オーダー商品を収容する対象コンテナを、作業位置までの搬送経路上にある計測位置に搬送する。計測位置において、出荷支援システム1は、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取る。出荷支援システム1は、マーカから読み取った情報に基づいて、オーダー商品がどの区画に含まれるかを示す情報を出力することができる。これにより、コンテナ内を複数の区画に仕切って在庫商品を収容することができるようになり、コンテナ内の商品の収容力は向上する。また、出荷支援システム1は、搬送経路上でマーカを読み取って各区画に含まれる商品を特定するため、対象コンテナをコンベヤBに載置する向きが変わっても、読み取ったマーカに対応する区画内の商品を確実に特定することができる。これにより、コンテナに収容されたオーダー商品は、確実に把握可能となる。
上記の実施形態では、出荷支援システム1は、複数に仕切られた各区画に在庫商品を収容する複数のコンテナのうち、オーダー商品を収容する対象コンテナを、作業位置までの搬送経路上にある計測位置に搬送する。計測位置において、出荷支援システム1は、対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取る。出荷支援システム1は、マーカから読み取った情報に基づいて、オーダー商品がどの区画に含まれるかを示す情報を出力することができる。これにより、コンテナ内を複数の区画に仕切って在庫商品を収容することができるようになり、コンテナ内の商品の収容力は向上する。また、出荷支援システム1は、搬送経路上でマーカを読み取って各区画に含まれる商品を特定するため、対象コンテナをコンベヤBに載置する向きが変わっても、読み取ったマーカに対応する区画内の商品を確実に特定することができる。これにより、コンテナに収容されたオーダー商品は、確実に把握可能となる。
また、出荷支援システム1は、計測位置において、対象コンテナの位置および対象コンテナ内の各区画に取り付けられたマーカの位置を計測するようにしてもよい。出荷支援システム1は、計測したマーカの位置に基づいて、区画パターンを特定することができる。マーカの位置を計測して区画パターンを特定するため、マーカの数に基づいて区画パターンを特定する場合と比較して、オーダー商品がどの区画に含まれるかをより確実に把握可能となる。
<変形例>
以下に上記の実施形態の変形例について説明する。なお、以下の説明において、上記の実施形態と同等の構成や処理などについては、同一の符号を付し、詳細な説明は省略する。
以下に上記の実施形態の変形例について説明する。なお、以下の説明において、上記の実施形態と同等の構成や処理などについては、同一の符号を付し、詳細な説明は省略する。
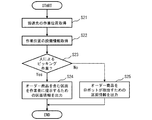
実施形態では、出荷支援システム1は、出荷対象の商品が対象コンテナ内のどの区画に含まれるかの情報を出力し、作業位置に設置される端末200に送信する。しかしながら、各作業位置でのピッキング作業は、オーダー商品の形状等に応じて、人(作業者)によって行われる場合およびロボットによって行われる場合がある。そこで、変形例では、出荷支援システム1は、ピッキング作業が人によって行われるかロボットによって行われるかによって、区画情報の出力処理の内容を変更する。変形例における出荷支援処理は、図11に示す出荷支援処理のステップS20の処理に変えて、図12に例示する区画情報の出力処理を含む。
図12は、区画情報の出力処理の流れを例示するフローチャートである。ステップS21では、出力部114は、ピッキング情報テーブルを参照して、オーダー商品を収容する対象コンテナの搬送先の作業位置を取得する。例えば、オーダーP001の商品Aを収容するコンテナの搬送先は、作業位置A21である。
ステップS22では、出力部114は、図8に示す設備情報テーブルを参照して、作業位置A21の設備情報を取得する。設備情報は、作業位置でのピッキング作業を人が行うかロボットが行うかの情報を含む。出力部114は、例えば、作業位置A21では人がピッキング作業をすることを特定することができる。
ステップS23では、出力部114は、対象コンテナの搬送先の作業位置において、ピッキング作業を人が行うかロボットが行うかを判定する。人によるピッキング作業である場合(ステップS23:Yes)、処理はステップS24に進む。ロボットによるピッキング作業である場合(ステップS23:No)、処理はステップS25に進む。
ステップS24では、出力部114は、作業者に対してオーダー商品がどの区画に含まれるかを提示するための区画情報を出力する。まず、出力部114は、ピッキング情報テーブルを参照して、オーダー商品を収容する対象コンテナおよび区画情報を取得する。出力部114は、取得した区画情報に基づいて、オーダー商品がどの区画に含まれるかを示す画像を、端末200に送信する。出力部114は、例えば、対象コンテナの撮像画像において、オーダー商品を含む区画を強調表示した画像を、端末200に送信することができる。また、出力部114は、オーダー商品がどの区画に含まれるかを示す画像に加えて、オーダー商品の商品名および注文数量を含むオーダー情報を、端末200に送信することができる。端末200は、出力部114によって出力された画像およびオーダー情報を受信し、オーダー商品がどの区画に含まれるかを作業者に提示することができる。
ステップS25では、出力部114は、ロボットがオーダー商品含む区画から商品を取り出すために用いられる区画情報を出力する。まず、出力部114は、ステップS24と同様に、ピッキング情報テーブルから、オーダー商品を収容する対象コンテナおよび区画情報を取得する。出力部114は、取得した区画情報をロボット(端末200)に送信する。ロボットに送信する情報は、対象コンテナの位置情報およびオーダー商品を含む区画の位置情報を含むことが想定される。ロボットは、受信した区画の位置情報に基づいて、オーダー商品をピッキングすることができる。
変形例では、出荷支援システム1は、作業位置でのピッキング作業が人によって行われるかロボットによって行われるかを判定して、区画情報の出力処理の内容を変更する。このため、出荷支援システム1は、ピッキング作業の主体に応じて、区画情報の出力内容を柔軟に変更することができる。
<コンピュータが読み取り可能な記録媒体>
コンピュータその他の機械、装置(以下、コンピュータ等)に上記電子商取引装置の設定を行うための管理ツール、OSその他を実現させるプログラムをコンピュータ等が読み取り可能な記録媒体に記録することができる。そして、コンピュータ等に、この記録媒体のプログラムを読み込ませて実行させることにより、その機能を提供させることができる。ここで、コンピュータは、例えば、サーバ等である。
コンピュータその他の機械、装置(以下、コンピュータ等)に上記電子商取引装置の設定を行うための管理ツール、OSその他を実現させるプログラムをコンピュータ等が読み取り可能な記録媒体に記録することができる。そして、コンピュータ等に、この記録媒体のプログラムを読み込ませて実行させることにより、その機能を提供させることができる。ここで、コンピュータは、例えば、サーバ等である。
ここで、コンピュータ等が読み取り可能な記録媒体とは、データやプログラム等の情報を電気的、磁気的、光学的、機械的、または化学的作用によって蓄積し、コンピュータ等から読み取ることができる記録媒体をいう。このような記録媒体のうちコンピュータ等から取り外し可能なものとしては、例えばフレキシブルディスク、光磁気ディスク、CD−ROM、CD−R/W、DVD、ブルーレイディスク、DAT、8mmテープ、フラッシュメモリ等のメモリカード等がある。また、コンピュータ等に固定された記録媒体としてハードディスクやROM等がある。
1:出荷支援システム 100:サーバ 100a:CPU 100b:RAM
100c:HDD 100d:NIC 100e:センサ 120:データベース111:搬送制御部 112:計測部 113:読取部 114:出力部
121:オーダー情報データベース 122:在庫情報データベース
123:設備情報データベース 124:区画情報データベース
125:ピッキング情報データベース
200:端末 N:ネットワーク
100c:HDD 100d:NIC 100e:センサ 120:データベース111:搬送制御部 112:計測部 113:読取部 114:出力部
121:オーダー情報データベース 122:在庫情報データベース
123:設備情報データベース 124:区画情報データベース
125:ピッキング情報データベース
200:端末 N:ネットワーク
Claims (8)
- 複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送する搬送制御手段と、
前記作業位置までの搬送経路上の計測位置において、前記対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取る読取手段と、
前記マーカに格納された情報に基づいて、前記出荷対象の商品が前記対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する出力手段と、を備える、
出荷支援システム。 - 前記計測位置において、前記対象コンテナの位置および前記対象コンテナ内の各区画に取り付けられた前記マーカの位置を計測し、前記マーカの位置に基づいて、各区画の配置を特定する計測手段をさらに備える、
請求項1に記載の出荷支援システム。 - 前記搬送制御手段は、前記作業位置において、前記出荷作業を作業者が行うか、ロボットが行うかを判定する、
請求項1または2に記載の出荷支援システム。 - 前記出力手段は、前記出荷作業を前記作業者が行うと判定された場合、前記出荷対象の商品を含む区画を、光で照射することにより前記作業者に示す、
請求項3に記載の出荷支援システム。 - 前記出力手段は、前記出荷作業を前記作業者が行うと判定された場合、前記対象コンテナ内の各区画の配置および前記出荷対象の商品が収容されている区画を示す画像を前記作業者に提示する、
請求項3に記載の出荷支援システム。 - 前記出力手段は、前記出荷作業を前記ロボットが行うと判定された場合、前記対象コンテナ内の各区画の配置に基づいて、前記出荷対象の商品が収容されている区画の位置情報を前記ロボットに送信する、
請求項3に記載の出荷支援システム。 - コンピュータが、
複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送し、
前記作業位置までの搬送経路上の計測位置において、前記対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取り、
前記マーカに格納された情報に基づいて、前記出荷対象の商品が前記対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する、
出荷支援方法。 - コンピュータに、
複数に仕切られた各区画に在庫商品を収容する複数のコンテナの中から、出荷対象の商品を収容する対象コンテナを、出荷作業を行う作業位置まで搬送し、
前記作業位置までの搬送経路上の計測位置において、前記対象コンテナ内の各区画に取り付けられ、各区画に収容される在庫商品の情報を格納するマーカを読み取り、
前記マーカに格納された情報に基づいて、前記出荷対象の商品が前記対象コンテナ内のいずれの区画に含まれるかを示す情報を出力する、
処理を実行させるための出荷支援プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130758A JP2020007117A (ja) | 2018-07-10 | 2018-07-10 | 出荷支援システム、出荷支援方法および出荷支援プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130758A JP2020007117A (ja) | 2018-07-10 | 2018-07-10 | 出荷支援システム、出荷支援方法および出荷支援プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020007117A true JP2020007117A (ja) | 2020-01-16 |
Family
ID=69150388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018130758A Pending JP2020007117A (ja) | 2018-07-10 | 2018-07-10 | 出荷支援システム、出荷支援方法および出荷支援プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020007117A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023531540A (ja) * | 2020-07-02 | 2023-07-24 | 深▲せん▼市海柔▲創▼新科技有限公司 | 物品棚卸方法、装置、倉庫ロボットおよび倉庫システム |
| JPWO2024142387A1 (ja) * | 2022-12-28 | 2024-07-04 |
-
2018
- 2018-07-10 JP JP2018130758A patent/JP2020007117A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023531540A (ja) * | 2020-07-02 | 2023-07-24 | 深▲せん▼市海柔▲創▼新科技有限公司 | 物品棚卸方法、装置、倉庫ロボットおよび倉庫システム |
| US12271863B2 (en) | 2020-07-02 | 2025-04-08 | Hai Robotics Co., Ltd. | Material inventory counting method and apparatus, warehousing robot, and warehousing system |
| JPWO2024142387A1 (ja) * | 2022-12-28 | 2024-07-04 | ||
| WO2024142387A1 (ja) * | 2022-12-28 | 2024-07-04 | ロジスティード株式会社 | 作業支援システム、作業支援方法、およびプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20090251294A1 (en) | Article management system and article management method | |
| JP3618676B2 (ja) | 情報システムを用いた通い箱物流管理システム | |
| JP5669921B2 (ja) | 所在管理システム | |
| KR20090043599A (ko) | 부품 관리 프로그램을 기억한 컴퓨터 판독 가능한 기억 매체, 부품 관리 방법 및 부품 관리 장치 | |
| CN107636708A (zh) | 对物流容器以及物品中的至少任意一种进行管理的管理系统以及管理方法 | |
| JP2019112231A (ja) | 物品管理システム及び物品管理モジュール | |
| JP5455401B2 (ja) | 所在管理システム | |
| CN114013891B (zh) | 一种立体分拣方法、立体分拣机器人和系统 | |
| JP2020007117A (ja) | 出荷支援システム、出荷支援方法および出荷支援プログラム | |
| JP6724155B2 (ja) | 重量管理システム及び重量管理方法 | |
| CN108269044A (zh) | 超市自助运输方法及装置 | |
| JP4435030B2 (ja) | 物品管理システム、サーバ装置、物品管理方法、およびプログラム | |
| JP2010238007A (ja) | 配置管理装置および配置管理プログラム | |
| JP6736125B2 (ja) | 運搬資材管理プログラムおよび運搬資材管理装置 | |
| JP2022165948A (ja) | 表示システム | |
| JP2003118814A (ja) | 棚割指示装置、棚割指示方法および棚割指示プログラム | |
| JP5061495B2 (ja) | 検品装置 | |
| JP7571876B2 (ja) | 電子部品の管理方法 | |
| US12242918B2 (en) | Egg information management system | |
| US20250315788A1 (en) | Storage and retrieval system | |
| JP4641196B2 (ja) | 仕分けシステム | |
| JP2019167239A (ja) | 物品管理システム、買物支援システム、物品管理方法、及びプログラム | |
| JP3644953B1 (ja) | 電子タグ情報処理装置及びpos端末並びに電子タグ情報処理プログラム | |
| JP2025018386A (ja) | 物品管理システム、物品管理方法 | |
| JPH04144808A (ja) | ピッキングカートシステム |