JP2020007145A - 物品移動装置および制御装置 - Google Patents
物品移動装置および制御装置 Download PDFInfo
- Publication number
- JP2020007145A JP2020007145A JP2018132430A JP2018132430A JP2020007145A JP 2020007145 A JP2020007145 A JP 2020007145A JP 2018132430 A JP2018132430 A JP 2018132430A JP 2018132430 A JP2018132430 A JP 2018132430A JP 2020007145 A JP2020007145 A JP 2020007145A
- Authority
- JP
- Japan
- Prior art keywords
- article
- condition
- side conveyor
- wall portion
- end effector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Intermediate Stations On Conveyors (AREA)
- Specific Conveyance Elements (AREA)
Abstract
【課題】物品の形態にかかわらず、コンベア間などのように所望の領域間でスムーズに物品を移動させることが可能な物品移動装置を提供する。【解決手段】物品移動装置は、ピッキングロボットと、該ロボットの動作を制御する制御装置とを備える。ピッキングロボットは、所定範囲内で変位するエンドエフェクタを含む。エンドエフェクタは、平板状の第1の壁部と、第1の壁部の縁から垂下して配置された第2の壁部と、物品を把持する把持機構と、第1および第2の壁部を所定の回動方向に回動させる回動機構とを有する。制御装置は、物品の把持状況に基づいて物品を移動させる方法を選択するための条件を判定し、条件を満たす場合、把持機構で把持した状態で物品を引きずり可能な姿勢に、条件を満たさない場合、把持機構で把持することなく物品を押し出し可能な姿勢に、第1および第2の壁部を回動させ、物品を移動させるようピッキングロボットを制御する。【選択図】 図1
Description
本発明の実施形態は、物品をピッキングエリアからリリースエリアに移動させる移動装置(以下、物品移動装置という)、およびその制御装置に関する。
物品の物流センタなどでは、荷物、部品、製品などの様々な物品が荷下ろしなどの上流工程から仕分けや組み立てなどの下流工程へ、物品移動装置によって順次移動される。物品の移動には、例えばベルトコンベアやローラコンベアなどのコンベアおよびピッキングロボットが使用される。
工程間での物品の受け渡しの際には、物品の集積領域とコンベア間、あるいはコンベア間で物品の移動が行われる。コンベア間で物品を移動させる場合、例えば、上流工程側のコンベア(以下、ピッキング側コンベアという)を搬送される物品をピッキングロボットでピッキングし、下流工程側のコンベア(以下、リリース側コンベアという)に移動させる。この場合、ピッキングロボットは、ピッキング側コンベアを搬送されている物品を把持(一例として、吸着)して持ち上げ、リリース側コンベア上まで移動させて解放し、リリース側コンベアに載置する。これにより、物品は、リリース側コンベアによって次工程に搬送される。
しかしながら、移動の対象となる物品の形態、例えば大きさ、形状、重量、梱包状態などは、一律ではなく多種多様である場合も多い。したがって、移動対象の物品群の中には、ピッキング側コンベアからピッキングロボットで持ち上げ、リリース側コンベアで解放するのに不向きな物品が混在している場合がある。例えば、ピッキングロボットで適正に把持できない大きさや形状、梱包状態の物品であったり、持ち上げられない重量の物品であったりした場合など、物品の形態によっては、ピッキング作業のやり直しや中断などを発生させ、コンベア間での移動効率を低下させるおそれがある。
このため、物品の形態にかかわらず、コンベア間などのように所望の領域間で、従来よりもスムーズに物品を移動させることが可能な物品移動装置が求められている。
実施形態の物品移動装置は、作業台に位置する物品を把持してリリース側コンベアに移動させるピッキングロボットと、ピッキングロボットでの物品の把持状況に基づいて、ピッキングロボットの動作を制御する制御装置とを備える。ピッキングロボットは、作業台およびリリース側コンベアに対して所定範囲内で変位するエンドエフェクタを含む。エンドエフェクタは、平板状の第1の壁部と、第1の壁部の縁から垂下して配置された第2の壁部と、第1の壁部および第2の壁部にそれぞれ設けられて物品を把持する把持機構と、第1の壁部および前記第2の壁部を所定の回動方向に回動させる回動機構とを有する。制御装置は、物品の把持状況に基づいて、作業台からリリース側コンベアに物品を移動させる方法を選択するための条件を判定し、条件を満たす場合、把持機構で把持した状態で物品を引きずり可能な姿勢に、条件を満たさない場合、把持機構で把持することなく前記物品を押し出し可能な姿勢に、それぞれ第1の壁部および第2の壁部を回動させ、物品を移動させるようピッキングロボットを制御する。
以下、実施形態に係る物品移動装置およびその制御装置について、図1から図8を参照して説明する。物品移動装置は、物品を所望の領域間で移動させる装置であり、例えば物流センタなどで稼働する物流システムを構成する装置の一つである。制御装置は、かかる物品移動装置において物品の移動制御を行う装置である。物品は、宅配物、小包、郵便物等を含む荷物、各種の部品や製品など、移動の対象となり得る有形物である。物品の形態(大きさ、形状、重量、梱包状態など)は、一律ではなく多種多様である場合を想定するが、一律であってもよい。また、物品の移動は、所望領域の一方から他方に物品の所在位置を変位させる動作態様であり、変位方法の如何は問わない。本実施形態では、後述するような持ち上げ、引きずり、押し出しのいずれの方法による移動も含むものとする。
図1には、本実施形態の物品移動装置1を斜め上方から模式的に示す。図1に示すように、物品移動装置1は、作業台2とリリース側コンベア10との間で物品6を移動させる装置であり、ピッキングロボット3と、検出装置4と、制御装置5とを備えて構成されている。
作業台2は、リリース側コンベア10に対する物品6の移動元であり、ピッキングロボット3にピッキングされる物品6が位置する。本実施形態において、作業台2はコンベア(以下、ピッキング側コンベア2という)である。ピッキング側コンベア2は、ピッキングロボット3によってピッキングされる物品6(図1に実線で示す物品6)を搬送する。
リリース側コンベア10は、ピッキングロボット3から解放された物品6(図1に二点鎖線で示す物品6)を搬送する。リリース側コンベア10は、物品移動装置1が組み込まれた物流システムが稼働する物流センタなどに設置されており、物品移動装置1が移動させた物品6を仕分けや組み立てなどの次工程に送るためのコンベアである。リリース側コンベア10の稼動は、物流システムの制御装置によって制御されるが、制御装置5によって制御されてもよい。
なお、ピッキング側コンベア2およびリリース側コンベア10は、いずれもベルトコンベアであるが、ローラコンベアであっても構わない。これらのコンベア2,10は、いずれも無端ベルト2b,10bが搬送方向A2,A10に流れるように、所定の駆動機構(図示しない)によって駆動される。搬送方向A2,A10は、それぞれのコンベア2,10において物品6が搬送される方向である。
このように、本実施形態ではリリース側コンベア10に対する物品6の移動元、つまり作業台2をコンベアとし、物品6を搬送する構成としている。ピッキング側コンベア2には、所定の時間差で物品が1つずつ投入されている。したがって、ピッキング側コンベア2では、物品6が所定の間隔をあけて1つずつ搬送される。ピッキング側コンベア2への物品6の投入方法は、特に問わない。なお、作業台2は、コンベアのように物品6を搬送する可動構造を有していなくてもよく、テーブルのように物品6を静止して載置する構造のものであってもよい。コンベアであるかにかかわらず、作業台2は、リリース側コンベア10の高さに合わせて高さ調節が可能な機構を有することが好ましい。
ピッキング側コンベア2とリリース側コンベア10は、図1に示すように搬送方向A2,A10を合わせ、所定間隔をあけて並べて設置されている。これらのコンベア2,10間には、両者を架け渡し、空隙を埋める架橋部7が設けられている。架橋部7は、コンベア2,10間への物品6の落下を防ぎ、ピッキング側コンベア2からリリース側コンベア10に物品6をスムーズに移動させるための部材である。したがって、物品6の大きさ(例えば、最短辺の長さ)と比べ、ピッキング側コンベア2とリリース側コンベア10との間隔が十分に短く、コンベア2,10間での物品6の移動に支障がない場合、架橋部7は省略可能である。なお、ピッキング側コンベア2とリリース側コンベア10は、間隔をほぼあけずに並べて設置してもよい。
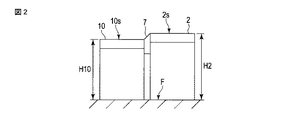
図2には、ピッキング側コンベア2とリリース側コンベア10の設置態様の一例を模式的に示す。図2に示すように、本実施形態では一例として、互いの設置面Fから搬送面2s,10sまでの高さH2,H10は、リリース側コンベア10よりもピッキング側コンベア2の方が高い(H2>H10)。したがって、搬送面2sと搬送面10sとの段差をなくすように、架橋部7は、ピッキング側コンベア2からリリース側コンベア10に向けて下り勾配のスロープ状に構成されている。なお、搬送面10sの方が搬送面2sよりも高い場合、架橋部7は、ピッキング側コンベア2からリリース側コンベア10に向けて上り勾配のスロープ状であればよい。
ピッキングロボット3は、ピッキング側コンベア2を搬送される物品6をピッキングし、ピッキングした物品6をリリース側コンベア10に移動させる。図1に示すように、ピッキングロボット3は、いわゆるパラレルリンクロボットであり、ベース部31と、リンク部32と、可動部33と、エンドエフェクタ34とを含んで構成される。なお、ピッキングロボットは、このようなパラレルリンクロボットに限定されず、例えば複数の軸まわりに動作制御されるシリアルリンクロボット(ロボットアーム)であってもよい。
ベース部31は、ピッキング側コンベア2およびリリース側コンベア10に対してピッキングロボット3を位置決めする部分である。ベース部31は、例えば物流センタの建屋の天井や梁などに位置決め固定されている。
リンク部32は、ベース部31の下側に周方向へ等間隔で配置されている。リンク部32は、リンク機構としてベース部31に連結される3つの第1アーム321と、これらの第1アーム321にそれぞれ1つずつ連結される3つの第2アーム322を有している。第1アーム321は、ベース部31から放射状に周方向へほぼ等ピッチ(120°間隔)で配置され、ベース部31に収容されたモータ(図示省略)の回転軸に基端が連結されて回動可能とされている。モータは、3つの第1アーム321に1つずつ対応して3つ設けられている。第2アーム322は、互いに平行な直線状の2本の棒体によって構成され、これら棒体の基端がそれぞれ第1アーム321の先端(モータとの連結側とは反対の端部)に回動可能に連結されている。
可動部33は、3つの第2アーム322の先端(第1アーム321との連結側とは反対の端部)にそれぞれ回動可能に連結されている。ベース部31のモータを個別に駆動させることで、第1アーム321および第2アーム322が回動することによって、可動部33は、所定範囲内において、ベース部31に対して自由に変位(動作)する。所定範囲(つまり、可動範囲)には、ピッキング側コンベア2およびリリース側コンベア10が含まれている。したがって、モータを駆動させることで、可動部33をピッキング側コンベア2およびリリース側コンベア10に対して変位させることが可能となる。なお、モータの駆動は、制御装置5によって制御される。
エンドエフェクタ34は、可動部33に着脱可能に取り付けられ、可動部33とともにピッキング側コンベア2およびリリース側コンベア10に対して所定範囲内で変位する。また、エンドエフェクタ34は、物品6を解放可能に把持する。把持は、例えば吸着、挟持など、物品6の保持態様全般を包含する概念として規定される。
図3には、エンドエフェクタ34の構成を模式的に示す。図3に示すように、エンドエフェクタ34は、2つの壁部341,342と、把持機構343と、回動機構344とを有する。2つの壁部341,342は、一方が平板状をなし、他方が一方の辺縁から垂下して配置されている。本実施形態では、2つの壁部341,342は、互いに略直交して連続しており、ほぼL状に構成されている。例えば、2つの壁部341,342のうち第1の壁部341は、物品6の第1面と対向可能な壁部である。物品6の第1面は、物品6がピッキング側コンベア2に載置(搬送)された状態における上面、つまり搬送面2sと接触する底面と対をなす面(一例として、図3(a),(b)に示す面61)である。第2の壁部342は、第1の壁部341の縁から垂下して配置され、物品6の第2面と対向可能な壁部である。物品6の第2面は、物品6がピッキング側コンベア2に載置された状態における上面と底面以外のいずれかの面、つまり側面(一例として、図3(a),(b)に示す面62)である。
把持機構343は、第1の壁部341に設けられた第1の把持機構343aと、第2の壁部342に設けられた第2の把持機構343bを有する。第1の把持機構343aは、物品6の第1面を解放可能に把持する。第2の把持機構343bは、物品6の第2面を解放可能に把持する。本実施形態では一例として、把持機構343は、エアによって物品6の吸着と解放を行う。したがって、把持機構343は、吸着パッド35のほか、真空発生器、コンプレッサ、電磁弁、圧力センサ(いずれも図示省略)などを含んで構成される。これにより、ピッキングロボット3は、ピッキング側コンベア2を搬送される物品6を把持機構343の吸着パッド35で吸着し、吸着した物品6をリリース側コンベア10に対して解放することで、物品6をコンベア2,10間で移動可能とされている。吸着パッド35は、樹脂製や蛇腹構造などとされ、吸着方向に伸縮可能に弾性変形する。第1の壁部341および第2の壁部342にそれぞれ設けられる吸着パッド35の数、大きさ、配置などは、エンドエフェクタ34の大きさ、吸着対象に含まれる物品6の大きさや重量などに応じて任意に設定され、特に限定されない。
回動機構344は、エンドエフェクタ34を可動部33に対して所定の回動方向に回動させる。例えば、図3の(a)と(b)で示す状態に互換するように、回動機構344はエンドエフェクタ34を回動させる。この時、第2の壁部342は、エンドエフェクタ34の回動方向に互いに略180°ずれて(図3(a),(b)においては左右反転して)位置付けられる。図3(a)に示す姿勢は、エンドエフェクタ34の基本姿勢の一例であり、同図(b)に示す姿勢は、エンドエフェクタ34の反転姿勢の一例である(詳細は後述)。回動機構344は、アクチュエータのほか、ギア部、軸受部(いずれも図示省略)などを含んで構成される。アクチュエータは、駆動軸を垂直方向に沿わせて可動部33に固定される。アクチュエータの駆動は、制御装置5によって制御される。
検出装置4は、ピッキングロボット3での物品6の把持状況を検出する。把持状況には、ピッキングロボット3で物品6が把持された状況と把持されなかった状況のいずれも含まれる。かかる把持状況を検出するため、検出装置4は、検出部として各種センサやカメラなどを含んでいる。
物品6の把持状況として、検出装置4は、エンドエフェクタ34の把持機構343に物品6が正常に吸着されているか否かを検出する。検出装置4は、例えば吸着パッド35の内圧を圧力センサで検出する。検出された吸着パッド35の内圧が適正な負圧範囲内であれば、物品6が吸着パッド35に正常に吸着されていると判定できる。かかる判定は、制御装置5が行う。
物品6の把持状況として、検出装置4は、エンドエフェクタ34の把持機構343に物品6が正常に吸着されているか否かを検出する。検出装置4は、例えば吸着パッド35の内圧を圧力センサで検出する。検出された吸着パッド35の内圧が適正な負圧範囲内であれば、物品6が吸着パッド35に正常に吸着されていると判定できる。かかる判定は、制御装置5が行う。
また、物品6が正常に吸着されている場合、検出装置4は、吸着された物品6をピッキング側コンベア2からピッキングロボット3で持ち上げられるか否かを検出する。加えて、物品6を持ち上げられない場合であっても、ピッキング側コンベア2の搬送面2s上で物品6を引きずることができるか否かを検出する。これらの検出にあたって、検出装置4は、例えば物品6を吸着した状態でエンドエフェクタ34が上昇した際、もしくは水平移動(スライド)した際、吸着パッド35と物品6との接触有無を接触センサで検出する。吸着パッド35と物品6とが接触していることが検出されれば、吸着した物品6をピッキングロボット3で持ち上げること、もしくは引きずることが可能と判定できる。かかる判定は、制御装置5が行う。なお、上記検出は、接触センサではなく、例えば3Dカメラで行ってもよい。この場合、物品6の把持状態を立体的に捉えた画像を3Dカメラで撮像し、エンドエフェクタ34の上昇時やスライド時の画像を解析して吸着パッド35と物品6との接触有無を検出する。また、吸着パッド35の内圧を圧力センサで検出し、検出された内圧に基づいて物品6の持ち上げや引きずりの可否を判定してもよい。例えば、物品6の持ち上げや引きずり動作に入った際、吸着パッド35の内圧が大気圧に戻ることなく適正な負圧範囲内に保たれていれば、物品6の持ち上げや引きずりが可能であると判定できる。
また、検出装置4は、ピッキング側コンベア2を搬送されている物品6の形態を検出する。検出装置4は、例えば搬送されている物品6を立体的に捉えた画像を3Dカメラで撮像し、その画像を解析して物品6の形態(大きさ、形状、梱包状態など)を検出する。
制御装置5は、作業台(ピッキング側コンベア)2、ピッキングロボット3、検出装置4の動作をそれぞれ制御する。制御装置5は、CPU、メモリ、記憶装置(不揮発メモリ)、入出力回路、タイマなどを含む演算処理部(図示省略)を備えている。演算処理部は、各種データを入出力回路により読み込み、記憶装置からメモリに読み出したプログラムを用いてCPUで演算処理し、処理結果に基づいた制御(物品6の移動制御)を行う。本実施形態において、制御装置5は、ピッキング側コンベア2、ピッキングロボット3、検出装置4と有線もしくは無線で接続され、これらとの間で各種データや演算結果などを送受信している。
これにより、制御装置5は、検出装置4を動作制御して検出させたデータ(検出結果)を入出力回路により読み込み、メモリから読み出したプログラムを用いてCPUで演算し、演算結果に基づいてピッキング側コンベア2およびピッキングロボット3の動作制御をそれぞれ行う。
このような構成をなす物品移動装置1の動作と作用について、ピッキング側コンベア2、ピッキングロボット3、および検出装置4に対する制御装置5の制御フローに従って説明する。図4には、本実施形態の物品移動装置1における制御装置5の制御フローを示す。なお、制御装置5は、例えばピッキング側コンベア2で物品6が搬送されている間、別の捉え方をすればピッキング側コンベア2への物品6の投入が終了するまで、コンベア2,10間での物品6の移動制御を繰り返し行う。
制御装置5は、ピッキング側コンベア2を搬送されている物品6をピッキングロボット3に把持させる(S101)。ただし、この段階では、物品6がピッキングロボット3に実際に把持(吸着)されているかどうかは確定されていない。物品6を把持させる際、制御装置5は、回動機構344を動作させて、エンドエフェクタ34を基本姿勢にする。基本姿勢は、第1の壁部341が水平をなし、第1の壁部341のリリース側コンベア10寄りの縁で第2の壁部342が垂下している姿勢である。後述する図5(a)、図6(a)、および図7(a)には、基本姿勢の一例をそれぞれ示す。また、物品6を把持させる際、制御装置5は、検出装置4によって検出された物品6の形態に基づいて、把持機構343による物品6の把持(吸着)位置を決定する。
続いて、制御装置5は、検出装置4に物品6の把持状況を検出させる(S102)。検出装置4は、吸着パッド35の内圧を圧力センサで検出するとともに、吸着パッド35と物品6との接触有無を接触センサで検出する。
そして、制御装置5は、検出装置4による物品6の把持状況の検出結果に基づいて、物品6の移動方法を選択するための条件判定を次のように行う。
制御装置5は、物品6の持ち上げ条件を判定する(S103)。持ち上げ条件は、ピッキングロボット3で物品6をピッキング側コンベア2から持ち上げられるか否かを判定するための条件である。例えば、吸着パッド35の内圧が適正な負圧範囲内であり、かつエンドエフェクタ34を上昇させても吸着パッド35が物品6と接触している場合は、持ち上げ条件を満たす。一方、吸着パッド35の内圧が適正な負圧範囲外である場合、あるいはエンドエフェクタ34の上昇時に吸着パッド35が物品6と非接触となる場合は、持ち上げ条件を満たさない。なお、吸着パッド35の内圧の適正な負圧範囲は、例えば制御装置5の記憶装置に格納され、持ち上げ条件の判定時にパラメータとして制御装置5に読み出される。
制御装置5は、物品6の持ち上げ条件を判定する(S103)。持ち上げ条件は、ピッキングロボット3で物品6をピッキング側コンベア2から持ち上げられるか否かを判定するための条件である。例えば、吸着パッド35の内圧が適正な負圧範囲内であり、かつエンドエフェクタ34を上昇させても吸着パッド35が物品6と接触している場合は、持ち上げ条件を満たす。一方、吸着パッド35の内圧が適正な負圧範囲外である場合、あるいはエンドエフェクタ34の上昇時に吸着パッド35が物品6と非接触となる場合は、持ち上げ条件を満たさない。なお、吸着パッド35の内圧の適正な負圧範囲は、例えば制御装置5の記憶装置に格納され、持ち上げ条件の判定時にパラメータとして制御装置5に読み出される。
S103において持ち上げ条件を満たす場合、制御装置5は、ピッキング側コンベア2から物品6を持ち上げ、リリース側コンベア10に移動させるようにピッキングロボット3を動作させる(S104)。
そして、制御装置5は、ピッキングロボット3でリリース側コンベア10の搬送面10sに物品6を載置し、解放させる(S105)。物品6の解放後、制御装置5は、エンドエフェクタ34を上昇させる。これにより、解放された物品6は、リリース側コンベア10を搬送方向A10に搬送され、次工程に送られる。
そして、制御装置5は、ピッキングロボット3でリリース側コンベア10の搬送面10sに物品6を載置し、解放させる(S105)。物品6の解放後、制御装置5は、エンドエフェクタ34を上昇させる。これにより、解放された物品6は、リリース側コンベア10を搬送方向A10に搬送され、次工程に送られる。
図5には、このように物品6aを持ち上げて移動させる場合のエンドエフェクタ34の動作態様の一例を示す。図5において、搬送方向A2,A10は、いずれも裏から表(奥から手前)の方向である。物品6aの移動にあたって、ピッキングロボット3のエンドエフェクタ34は、物品6aを吸着パッド35で吸着する(図5(a))。その際、吸着パッド35は、物品6aの第1面61aと第2面62aにそれぞれ吸着する。次いで、ピッキングロボット3は、吸着した物品6aをピッキング側コンベア2から持ち上げ、リリース側コンベア10の上方に向けて移動させる(図5(b))。そして、ピッキングロボット3は、吸着した物品6aを下降させてリリース側コンベア10の搬送面10sに載置する(図5(c))。載置後、ピッキングロボット3は、吸着パッド35から物品6aを解放し、エンドエフェクタ34を上昇させる(図5(d))。なお、リリース側コンベア10の搬送面10sではなく、架橋部7の上で物品6aを解放させてもよい。これにより、スロープ状に構成された架橋部7を滑らせて物品6aをリリース側コンベア10まで移動させることができる。
これに対し、S103において持ち上げ条件を満たさない場合、制御装置5は、引きずり条件を判定する(S106)。引きずり条件は、物品6を持ち上げられない場合に、ピッキング側コンベア2の搬送面2s上で物品6を引きずることができるか否かを判定するための条件である。例えば、吸着パッド35の内圧が適正な負圧範囲内であり、かつエンドエフェクタ34を水平移動(スライド)させても吸着パッド35が物品6と接触している場合は、引きずり条件を満たす。なお、引きずり条件は、持ち上げ条件を満たさないこと、具体的にはエンドエフェクタ34の上昇時に吸着パッド35が物品6と非接触となることを前提条件として満たされる。一方、吸着パッド35の内圧が適正な負圧範囲外である場合、あるいはエンドエフェクタ34のスライド時に吸着パッド35が物品6と非接触となる場合は、引きずり条件を満たさない。なお、吸着パッド35の内圧の適正な負圧範囲は、引きずり条件の判定時にパラメータとして制御装置5に読み出される。
S106において引きずり条件を満たす場合、制御装置5は、ピッキング側コンベア2から物品6を持ち上げることなく、搬送面2s上を引きずってリリース側コンベア10に移動させるようにピッキングロボット3を動作させる(S107)。
そして、制御装置5は、ピッキングロボット3でリリース側コンベア10の搬送面10sに載置されるまで物品6を引きずり、解放させる(S105)。これにより、物品6を持ち上げられない場合であっても、ピッキング側コンベア2からリリース側コンベア10に物品6を速やかに移動させ、次工程に送ることができる。
そして、制御装置5は、ピッキングロボット3でリリース側コンベア10の搬送面10sに載置されるまで物品6を引きずり、解放させる(S105)。これにより、物品6を持ち上げられない場合であっても、ピッキング側コンベア2からリリース側コンベア10に物品6を速やかに移動させ、次工程に送ることができる。
図6には、このように物品6bを引きずって移動させる場合のエンドエフェクタ34の動作態様の一例を示す。図6において、搬送方向A2,A10は、いずれも裏から表(奥から手前)の方向である。この場合、持ち上げることができないため、物品6bは、例えば物品6a(図5)よりも重く、吸着パッド35で吸着して持ち上げ可能な最大重量を超えるような物品である。物品6bの移動にあたって、ピッキングロボット3のエンドエフェクタ34は、物品6bを吸着パッド35で吸着する(図6(a))。その際、吸着パッド35は、物品6bの第1面61bと第2面62bにそれぞれ吸着する。次いで、ピッキングロボット3は、吸着した物品6bをピッキング側コンベア2からリリース側コンベア10へ向けて引きずる(図6(b))。そして、ピッキングロボット3は、リリース側コンベア10の搬送面10sに載置されるまで物品6bを引きずる(図6(c))。その後、ピッキングロボット3は、吸着パッド35から物品6bを解放し、エンドエフェクタ34を上昇させる(図6(d))。
なお、吸着パッド35から物品6bを解放するタイミングは、解放された物品6bをリリース側コンベア10で適正に搬送させることが可能であれば、特に限定されない。図6(d)に示すように、搬送面10sに載置されるまで引きずった後、物品6bを解放してもよいし、例えば架橋部7まで引きずった段階で物品6bを解放してもよい。架橋部7で解放させた場合、物品6bは、スロープ状に構成された架橋部7を滑ってリリース側コンベア10まで移動する。
これに対し、S106において引きずり条件を満たさない場合、制御装置5は、ピッキング側コンベア2から持ち上げず、搬送面2s上を引きずることもなく、押し出すことで物品6を移動させる。例えば、吸着パッド35の内圧が適正な負圧範囲外である場合、エンドエフェクタ34を水平移動(スライド)させると吸着パッド35が物品6と非接触となる場合などは、引きずり条件を満たさない。
この場合、制御装置5は、エンドエフェクタ34を基本姿勢から反転姿勢になるように回動させる(S108)。反転姿勢は、第1の壁部341が水平をなし、第1の壁部341のピッキング側コンベア2寄りの縁で第2の壁部342が垂下している姿勢である。すなわち、エンドエフェクタ34を回動方向に略180°回動させ、基本姿勢を反転させた姿勢である。例えば後述する図7(b)には、図7(a)に示す基本姿勢に対する反転姿勢を一例として示す。
エンドエフェクタ34を反転姿勢とした後、制御装置5は、リリース側コンベア10の搬送面10sに載置されるまで物品6を押し出すように、ピッキングロボット3を動作させる(S109)。これにより、物品6を持ち上げることも引きずることもできない場合であっても、ピッキング側コンベア2からリリース側コンベア10に物品6を速やかに移動させ、次工程に送ることができる。
図7には、このように物品6cを押し出して移動させる場合のエンドエフェクタ34の動作態様の一例を示す。図7において、搬送方向A2,A10は、いずれも裏から表(奥から手前)の方向である。この場合、持ち上げることも引きずることもできないため、物品6cは、例えば吸着パッド35で適正に吸着できないような(吸着パッド35の内圧が適正な負圧範囲内でない)物品である。一例として、図7には、外形(梱包状態の形状を含む)が凸曲面状の物品6cを示す。
物品6cの移動にあたって、ピッキングロボット3は、基本姿勢のエンドエフェクタ34で物品6cの吸着を試みる(図7(a))。この場合、持ち上げ条件および引きずり条件をいずれも満たさないため、ピッキングロボット3は、エンドエフェクタ34を反転姿勢とする(図7(b))。反転姿勢のまま、ピッキングロボット3は、エンドエフェクタ34を僅かに下降させ、物品6cを搬送面2sに押圧させる(図7(c))。物品6cが吸着パッド35で吸着されていないため、このように押圧させることで、物品6cを押し出して移動させる際、その姿勢を安定させることができる。この時、吸着パッド35は、物品6cに吸着していないが、弾性変形して接触している。
次いで、ピッキングロボット3は、物品6cをピッキング側コンベア2からリリース側コンベア10へ向けて押し出す(図7(d))。この時、エンドエフェクタ34の第2の壁部342から吸着パッド35を介して、リリース側コンベア10方向(図7(d)においては左方向)への押出力が物品6cに作用される。これにより、物品6cは、エンドエフェクタ34とともにリリース側コンベア10へ向けて押し出される。すなわち、第2の壁部342は、物品6cを押し出すための押出壁として機能する。そして、ピッキングロボット3は、リリース側コンベア10の搬送面10sに載置されるまで物品6cを押し出し、エンドエフェクタ34を上昇させる(図7(e))。なお、物品6cの形態(大きさ、形状、重量など)によっては、リリース側コンベア10の搬送面10sに載置されるまで押し出さなくとも、架橋部7の上まで押し出すことで、スロープ状に構成された架橋部7を滑ってリリース側コンベア10まで移動させることが可能である。
制御装置5は、物品6を持ち上げて移動させる場合(S104)や引きずって移動させる場合(S107)、吸着パッド35に吸着された物品6をピッキングロボット3に解放させた後、物品6の移動制御を終了する。これに対し、物品6を押し出して移動させる場合、物品6が吸着パッド35に吸着されていないため、制御装置5は、持ち上げ移動や引きずり移動の場合のように物品6をピッキングロボット3に解放させる必要はない。したがって、制御装置5は、そのまま物品6の移動制御を終了する。
そして、上述したとおり、制御装置5は、例えばピッキング側コンベア2で物品6が搬送されている間(ピッキング側コンベア2への物品6の投入が終了するまで)、コンベア2,10間での物品6の移動制御を繰り返し行えばよい。
このように、本実施形態の制御装置5を備えた物品移動装置1によれば、物品6の形態にかかわらず、コンベア2,10間で、従来よりもスムーズに物品6を移動させることができる。例えば大きさ、形状、重量、梱包状態など、物品6の形態が一律ではなく多種多様である場合であっても、物品6をピッキング側コンベア2からリリース側コンベア10にスムーズに移動させることができる。したがって、物品6をリリース側コンベア10から仕分けや組み立てなどの次工程に速やかに送ることが可能となる。
すなわち、ピッキングロボット3で適正に把持できない大きさや形状、梱包状態の物品6cや、持ち上げられない重量の物品6bが移動対象の物品群に混在していた場合であっても、ピッキング作業のやり直しや中断などを生じさせることなく、コンベア2,10間で物品6を移動させることができる。このため、コンベア2,10間での物品6の移動効率を低下させずに済む。
以上、本発明の実施形態を説明したが、上述した実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これらの実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
上述した実施形態において、物品6を引きずって移動させる場合および押し出して移動させる場合、ピッキングロボット3は、エンドエフェクタ34を最短距離で、つまり搬送方向A2,A10といずれも直交する方向に変位させている。その際、ピッキング側コンベア2およびリリース側コンベア10の搬送速度に合わせてエンドエフェクタ34を搬送方向A2,A10に変位させながら、搬送方向A2,A10と直交する方向に変位させてもよい。すなわち、ピッキング側コンベア2およびリリース側コンベア10を斜めに横断するように、エンドエフェクタ34を変位させてもよい。これにより、物品6とコンベア2,10の搬送面2s,10sとの摩擦負荷を軽減して、物品6を移動させることができる。その結果、例えば破損しやすく取扱いに注意を要するような物品であっても、コンベア2,10間を安全に移動させることが可能となる。
図8には、このようにピッキング側コンベア2およびリリース側コンベア10を斜めに横断して物品6を移動させる場合のエンドエフェクタ34変位軌跡の一例を示す。図8の(a)は斜め横断開始時の状態、(b)は斜め横断中の状態、(c)は斜め横断終了時の状態をそれぞれ示す図である。
図8(a)に示すように物品6を吸着した状態で、ピッキング側コンベア2の搬送速度に合わせて搬送方向A2に変位させながら(矢印Y2で示す変位)、搬送方向A2と直交する方向にエンドエフェクタ34を変位させる(矢印X2で示す変位)。そのまま、図8(b)に示すように、架橋部7を経由してリリース側コンベア10まで、リリース側コンベア10の搬送速度に合わせて搬送方向A10およびこれと直交する方向に、エンドエフェクタ34をそれぞれ変位させる(矢印Y10および矢印X10で示す変位)。矢印Y2と矢印Y10で示す変位は、ピッキング側コンベア2およびリリース側コンベア10の搬送速度に応じて設定され、同一であっても異なっていてもよい。矢印X2と矢印X10で示す変位も同様に、同一であっても異なっていてもよい。
図8(a)に示すように物品6を吸着した状態で、ピッキング側コンベア2の搬送速度に合わせて搬送方向A2に変位させながら(矢印Y2で示す変位)、搬送方向A2と直交する方向にエンドエフェクタ34を変位させる(矢印X2で示す変位)。そのまま、図8(b)に示すように、架橋部7を経由してリリース側コンベア10まで、リリース側コンベア10の搬送速度に合わせて搬送方向A10およびこれと直交する方向に、エンドエフェクタ34をそれぞれ変位させる(矢印Y10および矢印X10で示す変位)。矢印Y2と矢印Y10で示す変位は、ピッキング側コンベア2およびリリース側コンベア10の搬送速度に応じて設定され、同一であっても異なっていてもよい。矢印X2と矢印X10で示す変位も同様に、同一であっても異なっていてもよい。
そして、図8(c)に示すように、リリース側コンベア10の搬送面10sに載置されるまで、エンドエフェクタ34を同様に変位させる。これにより、図8(c)に二点鎖線で示す状態から矢印A34で示すように、エンドエフェクタ34は、双方のコンベア2,10を斜めに横断するように変位する。その結果、双方のコンベア2,10を斜めに横断するように物品6を移動させることができる。
なお、図8には、エンドエフェクタ34に物品6を吸着させて引きずる場合を例示するが、物品6を吸着させることなく、押し出す場合も同様にエンドエフェクタ34を変位させることで、双方のコンベア2,10を斜め横断して物品6を移動させることができる。この場合、図8(a),(b),(c)に示す各状態において、エンドエフェクタ34は基本姿勢ではなく、反転姿勢である。
また、持ち上げ、引きずり、押し出しのいずれであるかを問わず、物品6を移動させる際、ピッキング側コンベア2およびリリース側コンベア10を一旦停止させ、移動終了後に再びこれらのコンベア2,10を稼動させてもよい。移動対象の物品6が少ない場合など、物品6の移動速度(効率)がそれほど要求されない場合には、コンベア2,10を一旦停止させることで、より安全かつ確実に物品6を移動させることができる。例えば、物品6を引きずり移動および押し出し移動させる場合のみ、コンベア2,10の一旦停止および再稼動を行ってもよい。
また、ピッキング側コンベア2に物品6を投入する際、例えば物品6の形態(大きさ、形状、重量、梱包状態など)を検出し、その検出結果(形態情報)を制御装置5に与えてもよい。これにより、ピッキング側コンベア2を搬送される物品6について予め取得した形態情報を用いて、その物品6の移動制御を行うことができる。例えば、物品6の重量や形状が予め得られている場合、制御装置5は、持ち上げ条件や引きずり条件の判定を行うことなく、物品6の引きずり移動や押し出し移動を行うことが可能である。すなわち、図4に示す制御フローにおいて、持ち上げ条件や引きずり条件の判定ステップ(S103,S106)を省略することができるので、より迅速に物品6の移動工程に入ることができ、コンベア2,10間での移動効率の一層の向上を図ることができる。
また、持ち上げ条件および引きずり条件をいずれも満たさない場合、制御装置5は、押し出し条件を判定してもよい。押し出し条件は、物品を持ち上げも引きずりもできない場合に、ピッキング側コンベア2の搬送面2s上で物品を押し出すことができるか否かを判定するための条件である。例えば、エンドエフェクタ34を反転姿勢とし、物品とともにリリース側へ向けて水平移動(スライド)させられる場合は、押し出し条件を満たす。一方、かかる状態でエンドエフェクタ34をスライドさせられない場合は、押し出し条件を満たさない。
押し出し条件を満たす場合、制御装置5は、上述したように物品を押し出し移動させる。これに対し、押し出し条件を満たさない場合、制御措置5は、物品の移動制御を中断する。この場合、持ち上げ、引きずり、押し出しのいずれでも物品を移動させられない状態であり、物品移動装置1を含む物流システムおよび作業員などの安全確保のため、物品の移動制御を中断する。具体的には、ピッキング側コンベア2、リリース側コンベア10およびピッキングロボット3をいずれも停止させる。そして、かかる物品を排除した後、コンベア2,10およびピッキングロボット3を再稼動させ、物品の移動制御を再開させればよい。
1…物品移動装置、2…作業台(ピッキング側コンベア)、2b…無端ベルト、2s…ピッキング側コンベアの搬送面、3…ピッキングロボット、4…検出装置、5…制御装置、6(6a,6b,6c)…物品、7…架橋部、10…リリース側コンベア、10b…無端ベルト、10s…リリース側コンベアの搬送面、31…ベース部、32…リンク部、33…可動部、34…エンドエフェクタ、35…吸着パッド、61,61a,61b…物品の第1面(上面)、62,62a,62b…物品の第2面(側面)、321…第1アーム、322…第2アーム、341…第1の壁部、342…第2の壁部、343…把持機構、343a…第1の把持機構、343b…第2の把持機構、344…回動機構、A2,A10…搬送方向、A34…斜め横断方向の変位、F…設置面、H2,H10…設置面から搬送面までの高さ、X2,X10…搬送方向と直交する変位、Y2,Y10…搬送方向の変位。
Claims (6)
- 作業台に位置する物品を把持してリリース側コンベアに移動させるピッキングロボットと、
前記ピッキングロボットでの前記物品の把持状況に基づいて、前記ピッキングロボットの動作を制御する制御装置と、を備え、
前記ピッキングロボットは、前記作業台および前記リリース側コンベアに対して所定範囲内で変位するエンドエフェクタを含み、
前記エンドエフェクタは、平板状の第1の壁部と、前記第1の壁部の縁から垂下して配置された第2の壁部と、前記第1の壁部および前記第2の壁部にそれぞれ設けられて前記物品を把持する把持機構と、前記第1の壁部および前記第2の壁部を所定の回動方向に回動させる回動機構と、を有し、
前記制御装置は、前記物品の把持状況に基づいて、前記作業台から前記リリース側コンベアに前記物品を移動させる方法を選択するための条件を判定し、前記条件を満たす場合、前記把持機構で把持した状態で前記物品を引きずり可能な姿勢に、前記条件を満たさない場合、前記把持機構で把持することなく前記物品を押し出し可能な姿勢に、それぞれ前記第1の壁部および前記第2の壁部を回動させ、前記物品を移動させるよう前記ピッキングロボットを制御する
物品移動装置。 - 前記回動機構は、前記第1の壁部が水平をなし、前記第1の壁部の前記リリース側コンベア寄りの縁で前記第2の壁部が垂下する基本姿勢と、前記基本姿勢を前記所定の回動方向に略180°反転させた反転姿勢とに、前記第1の壁部および前記第2の壁部を回動させる
請求項1に記載の物品移動装置。 - 前記制御装置は、
前記物品の把持状況に基づいて、前記物品を前記作業台の上で引きずることができるか否かの引きずり条件を判定し、
前記引きずり条件が満たされる場合、前記エンドエフェクタを前記基本姿勢にさせ、
前記引きずり条件が満たされない場合、前記エンドエフェクタを前記反転姿勢にさせる
請求項2に記載の物品移動装置。 - 前記制御装置は、
前記物品の把持状況に基づいて、前記物品を前記作業台から持ち上げられるか否かの持ち上げ条件を判定し、
前記持ち上げ条件が満たされる場合、前記把持機構で前記物品を把持し、把持した前記物品を持ち上げて移動させるように、前記ピッキングロボットを動作させ、
前記持ち上げ条件が満たされない場合、前記引きずり条件を判定する
請求項3に記載の物品移動装置。 - 前記作業台と前記リリース側コンベアとは、所定間隔をあけて配置され、
これらの間には、両者を架け渡し、両者間の空隙を埋める架橋部が設けられており、
前記制御装置は、前記作業台から前記架橋部まで前記物品を移動させるよう前記ピッキングロボットを制御する
請求項1に記載の物品移動装置。 - 物品が位置する作業台からピッキングロボットで前記物品を把持させた際の把持状況を検出させる手段と、
検出された前記把持状況に基づいて、前記作業台からリリース側コンベアに前記物品を移動させる方法を選択するための条件を判定する手段と、
前記条件の判定結果に応じて、把持する把持機構を有する前記ピッキングロボットのエンドエフェクタの姿勢を変位させる手段と、
前記条件を満たす場合、前記把持機構で把持した状態で前記物品を引きずり可能な姿勢に前記エンドエフェクタを変位させ、前記物品を移動させるよう前記ピッキングロボットを制御する手段と、
前記条件を満たさない場合、前記把持機構で把持することなく前記物品を押し出し可能な姿勢に前記エンドエフェクタを変位させ、前記物品を移動させるよう前記ピッキングロボットを制御する手段と、を備える
制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132430A JP2020007145A (ja) | 2018-07-12 | 2018-07-12 | 物品移動装置および制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132430A JP2020007145A (ja) | 2018-07-12 | 2018-07-12 | 物品移動装置および制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020007145A true JP2020007145A (ja) | 2020-01-16 |
Family
ID=69150430
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018132430A Pending JP2020007145A (ja) | 2018-07-12 | 2018-07-12 | 物品移動装置および制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020007145A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021062962A (ja) * | 2019-10-16 | 2021-04-22 | 上銀科技股▲分▼有限公司 | 自動搬送システム |
| JP2023511584A (ja) * | 2020-01-24 | 2023-03-20 | ベクトン・ディッキンソン・ロワ・ジャーマニー・ゲーエムベーハー | ピースグッズを分離するためのデバイスおよび方法 |
| CN116944058A (zh) * | 2023-06-29 | 2023-10-27 | 江西超音速人工智能科技有限公司 | 一种自动分拣装置及其分拣方法 |
| WO2024166982A1 (ja) * | 2023-02-09 | 2024-08-15 | ソフトバンクグループ株式会社 | 物品の包装装置、包装装置、および、包装システム |
| US12552617B2 (en) | 2020-01-24 | 2026-02-17 | Becton Dickinson Rowa Germany Gmbh | Device and method for separating piece goods |
-
2018
- 2018-07-12 JP JP2018132430A patent/JP2020007145A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021062962A (ja) * | 2019-10-16 | 2021-04-22 | 上銀科技股▲分▼有限公司 | 自動搬送システム |
| JP2023511584A (ja) * | 2020-01-24 | 2023-03-20 | ベクトン・ディッキンソン・ロワ・ジャーマニー・ゲーエムベーハー | ピースグッズを分離するためのデバイスおよび方法 |
| JP7682188B2 (ja) | 2020-01-24 | 2025-05-23 | ベクトン・ディッキンソン・ロワ・ジャーマニー・ゲーエムベーハー | ピースグッズを分離するためのデバイスおよび方法 |
| US12552617B2 (en) | 2020-01-24 | 2026-02-17 | Becton Dickinson Rowa Germany Gmbh | Device and method for separating piece goods |
| WO2024166982A1 (ja) * | 2023-02-09 | 2024-08-15 | ソフトバンクグループ株式会社 | 物品の包装装置、包装装置、および、包装システム |
| CN116944058A (zh) * | 2023-06-29 | 2023-10-27 | 江西超音速人工智能科技有限公司 | 一种自动分拣装置及其分拣方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020007145A (ja) | 物品移動装置および制御装置 | |
| US10793378B2 (en) | Transfer apparatus and article taking-out method | |
| US10494198B2 (en) | Pickup method and pickup device | |
| US10633198B2 (en) | Method and apparatus for feeding items of laundry to a laundry-treatment device, in particular to at least one loading conveyor | |
| JP2010005769A (ja) | デパレタイズ装置および方法 | |
| JP6532232B2 (ja) | 物品移送装置および物品移送方法 | |
| CN108698767A (zh) | 物品移送装置 | |
| CN117656037B (zh) | 一种自适应抓取晶圆双臂搬运机器人 | |
| JPH09131685A (ja) | ロボットのハンド装置 | |
| CN105339285B (zh) | 用于将设置成堆垛的物品卸垛和运送的设备和方法 | |
| JP2015036343A (ja) | 容器の保持アームと反転移送装置 | |
| CN210307880U (zh) | 具有吸附功能的末端执行器、机器人以及分拣系统 | |
| JP7419082B2 (ja) | 荷役装置および物品把持機構 | |
| JP7131974B2 (ja) | 物品移動装置および制御装置 | |
| TWI765247B (zh) | 機器人手、機器人及機器人系統 | |
| CN103857497B (zh) | 处理系统 | |
| JP2024027194A (ja) | 袋供給装置 | |
| JP7326559B2 (ja) | 物品移動装置および制御装置 | |
| JP7196729B2 (ja) | デパレタイズ装置及びデパレタイズ方法 | |
| CN108248932B (zh) | 物品转运装置 | |
| JP4274101B2 (ja) | 搬送システム | |
| JPH074448U (ja) | 板状物の半重ね搬送装置 | |
| EP1403196A1 (en) | Gripping members gripping and moving items stacked by a conveyor | |
| JP2025042264A (ja) | 物品移載装置 | |
| CN109205331A (zh) | 用于拆垛、分配的设备及其作业方法 |