JP2020040145A - マニピュレータ、及び移動ロボット - Google Patents
マニピュレータ、及び移動ロボット Download PDFInfo
- Publication number
- JP2020040145A JP2020040145A JP2018168031A JP2018168031A JP2020040145A JP 2020040145 A JP2020040145 A JP 2020040145A JP 2018168031 A JP2018168031 A JP 2018168031A JP 2018168031 A JP2018168031 A JP 2018168031A JP 2020040145 A JP2020040145 A JP 2020040145A
- Authority
- JP
- Japan
- Prior art keywords
- housing
- rotating unit
- arm
- unit
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
一例として、移動ロボット1が物流倉庫で使用される場合を説明する。一般に、物流倉庫では、複数の棚を上下に配列することにより複数のアイテムを効率よく保管している。移動ロボット1は、特定のアイテムが保管された棚の前で停止し、その棚から特定のアイテムを取得し、取得したアイテムを箱の中に入れ、その箱を他の場所に移動する。
図1は、実施の形態に係る移動ロボット1の斜視図の一例である。移動ロボット1は、無人搬送車2と、無人搬送車2に取り付けられるマニピュレータ10とを備える。
[ロボットアーム20の可動範囲]
図4は、ロボットアーム20の可動範囲の一例を示す正面図である。
[ロボットアーム20の折り畳み]
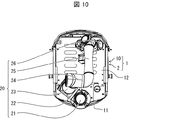
図9は、ロボットアーム20が筐体11の上側空間に収容された正面図の一例である。移動ロボット1では、第1回転部21、第2回転部22、及び第3回転部24はそれぞれ独立に制御される。そこで、図9に示すように、移動ロボット1は、第1回転部21、第2回転部22、及び第3回転部24の動作を制御して、ロボットアーム20を筐体11の上側空間に収容する。これにより、特に移動ロボット1の移動中に、ロボットアーム20と周囲の人又は物体との接触を抑制できる。また、移動ロボット1が静止している場合においても、ロボットアーム20と移動する周囲の人又は物体との接触を抑制できる。
本実施形態に係る移動ロボット1、及び移動ロボット1に搭載されるマニピュレータ10は、産業用ロボットとして様々な用途を有する。例えば、移動ロボット1、及びマニピュレータ10は、物流倉庫での物品の移動のほか、溶接、ハンドリング、塗装、シーリング、加工、又は組み立てなどに適用されうる。
2 無人搬送車
10 マニピュレータ
20 ロボットアーム
11 筐体
12 コンテナ台
21 第1回転部
22 第2回転部
23 第1アーム
24 第3回転部
25 第2アーム
26 吸着パッド
27 カメラ
50 コンテナ
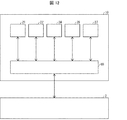
60 マニピュレータ制御部
Claims (7)
- 無人搬送車に取り付けられるマニピュレータであって、
前記無人搬送車に取り付けられる筐体と、
前記筐体の上部に設けられ、回転軸方向が鉛直方向となる第1回転部と、
前記第1回転部から水平方向に延伸し、回転軸方向が水平方向となる第2回転部と、
前記第2回転部から延伸し、前記第2回転部の回転によって当該第2回転部の回転軸を中心として前記筐体の側面よりも外側を周回するアーム部と、を備えるマニピュレータ。 - 前記第2回転部は、前記第1回転部の回転によって、前記筐体の上側空間の外側に配される請求項1に記載のマニピュレータ。
- 前記第1回転部は、前記筐体の上面端部に設けられる請求項1または2に記載のマニピュレータ。
- 前記アーム部から延伸する延伸部をさらに備え、
前記第1回転部、前記第2回転部、前記アーム部、及び前記延伸部を前記筐体の上側空間に収容する請求項1から3の何れか1項に記載のマニピュレータ。 - 前記無人搬送車の移動中に、前記第1回転部、前記第2回転部、前記アーム部、及び前記延伸部を前記筐体の上側空間に収容する請求項4に記載のマニピュレータ。
- 前記第1回転部及び前記第2回転部の動作を制御するマニピュレータ制御部を備え、
前記マニピュレータ制御部は、前記第1回転部、前記第2回転部、前記アーム部、及び前記延伸部を前記筐体の上側空間に収容させる請求項4または5に記載のマニピュレータ。 - 請求項1から6の何れか1項に記載のマニピュレータと前記無人搬送車とを備えた移動ロボット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168031A JP7110846B2 (ja) | 2018-09-07 | 2018-09-07 | マニピュレータ、及び移動ロボット |
| PCT/JP2019/033238 WO2020050079A1 (ja) | 2018-09-07 | 2019-08-26 | マニピュレータ、及び移動ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168031A JP7110846B2 (ja) | 2018-09-07 | 2018-09-07 | マニピュレータ、及び移動ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020040145A true JP2020040145A (ja) | 2020-03-19 |
| JP7110846B2 JP7110846B2 (ja) | 2022-08-02 |
Family
ID=69722534
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018168031A Active JP7110846B2 (ja) | 2018-09-07 | 2018-09-07 | マニピュレータ、及び移動ロボット |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7110846B2 (ja) |
| WO (1) | WO2020050079A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022023766A (ja) * | 2021-01-15 | 2022-02-08 | Dmg森精機株式会社 | 無人搬送システム |
| US12589505B2 (en) * | 2023-08-29 | 2026-03-31 | Yi Jin Kim | Autonomous picking and transport robot |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113664089B (zh) * | 2020-05-14 | 2023-11-03 | 泰科电子(上海)有限公司 | 冲压料带制造系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004230509A (ja) * | 2003-01-30 | 2004-08-19 | Matsushita Electric Ind Co Ltd | 移動ロボット |
| JP2012236249A (ja) * | 2011-05-11 | 2012-12-06 | Toyota Motor Corp | 走行ロボット |
| JP2014000664A (ja) * | 2012-06-21 | 2014-01-09 | Seiko Epson Corp | 関節機構およびロボット |
| JP2014210306A (ja) * | 2013-04-18 | 2014-11-13 | 株式会社安川電機 | 移動ロボット、移動ロボットの位置決めシステム、及び、移動ロボットの位置決め方法 |
| EP2939798A1 (en) * | 2014-05-02 | 2015-11-04 | OpiFlex Automation AB | An automation system and a method for tending a production system |
| US20170066592A1 (en) * | 2015-09-09 | 2017-03-09 | Bastian Solutions, Llc | Automated guided vehicle (agv) with batch picking robotic arm |
| CN206913136U (zh) * | 2017-03-07 | 2018-01-23 | 青岛科技大学 | 一种传送带式机械臂agv小车 |
-
2018
- 2018-09-07 JP JP2018168031A patent/JP7110846B2/ja active Active
-
2019
- 2019-08-26 WO PCT/JP2019/033238 patent/WO2020050079A1/ja not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004230509A (ja) * | 2003-01-30 | 2004-08-19 | Matsushita Electric Ind Co Ltd | 移動ロボット |
| JP2012236249A (ja) * | 2011-05-11 | 2012-12-06 | Toyota Motor Corp | 走行ロボット |
| JP2014000664A (ja) * | 2012-06-21 | 2014-01-09 | Seiko Epson Corp | 関節機構およびロボット |
| JP2014210306A (ja) * | 2013-04-18 | 2014-11-13 | 株式会社安川電機 | 移動ロボット、移動ロボットの位置決めシステム、及び、移動ロボットの位置決め方法 |
| EP2939798A1 (en) * | 2014-05-02 | 2015-11-04 | OpiFlex Automation AB | An automation system and a method for tending a production system |
| US20170066592A1 (en) * | 2015-09-09 | 2017-03-09 | Bastian Solutions, Llc | Automated guided vehicle (agv) with batch picking robotic arm |
| CN206913136U (zh) * | 2017-03-07 | 2018-01-23 | 青岛科技大学 | 一种传送带式机械臂agv小车 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022023766A (ja) * | 2021-01-15 | 2022-02-08 | Dmg森精機株式会社 | 無人搬送システム |
| US12589505B2 (en) * | 2023-08-29 | 2026-03-31 | Yi Jin Kim | Autonomous picking and transport robot |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7110846B2 (ja) | 2022-08-02 |
| WO2020050079A1 (ja) | 2020-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104136174B (zh) | 工业用机器人 | |
| WO2020050079A1 (ja) | マニピュレータ、及び移動ロボット | |
| JP5522298B2 (ja) | ビンピッキングシステム | |
| KR101952767B1 (ko) | 로봇 | |
| US20120067156A1 (en) | Robot for handling object | |
| US20110064554A1 (en) | Robot manipulator and robot system | |
| CN112969654B (zh) | 物品移载设备 | |
| EP3854733A1 (en) | Article transfer facility | |
| JP2018051708A (ja) | 水平多関節型ロボット | |
| TWI675728B (zh) | 機器人及機器人系統 | |
| JP2015112656A (ja) | ロボットハンド、ロボット、およびロボットセル | |
| KR101520451B1 (ko) | 3-자유도 손목장치가 부착된 데스크탑형 직각좌표 로봇 | |
| KR20210080524A (ko) | 로봇 핸드 및 이를 구비하는 로봇 | |
| KR20170018384A (ko) | 기계 및 상기 기계를 작동하기 위한 방법 | |
| US20180184864A1 (en) | Cleaning robot | |
| TW201433401A (zh) | 加工系統 | |
| JP2018012176A (ja) | 移載装置 | |
| CN208164320U (zh) | 焊接组装装置 | |
| EP1984151A2 (en) | Scara-type robotic system | |
| JPH1094983A (ja) | アクチュエータ機構 | |
| JP6291793B2 (ja) | ロボット、及びロボットシステム | |
| US10946512B2 (en) | Robot | |
| JP2017080859A (ja) | ロボットおよびロボットシステム | |
| Froehlich et al. | Design and implementation of a spherical joint for mobile manipulators | |
| CN110279204A (zh) | 镶石机及镶石系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220621 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220704 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7110846 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |