JP2020040146A - 移動ロボット - Google Patents
移動ロボット Download PDFInfo
- Publication number
- JP2020040146A JP2020040146A JP2018168032A JP2018168032A JP2020040146A JP 2020040146 A JP2020040146 A JP 2020040146A JP 2018168032 A JP2018168032 A JP 2018168032A JP 2018168032 A JP2018168032 A JP 2018168032A JP 2020040146 A JP2020040146 A JP 2020040146A
- Authority
- JP
- Japan
- Prior art keywords
- period
- vacuum pump
- signal output
- control
- mobile robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
まず、図1を用いて、本発明が適用される場面の一例について説明する。
搬送部1は、移動ロボット100を移動(搬送)させるものである。搬送部1は、無人搬送車11と、負圧を発生させる真空ポンプを制御する制御信号出力部12とを備えている。制御信号出力部12は、本発明の「制御部」の一例である。制御信号出力部12は、把持期間における真空ポンプの駆動量が、移動期間における真空ポンプの駆動量よりも大きくなるように制御を行う。把持期間は、ロボットアーム2によって対象物の把持動作が行われている期間を指す。移動期間は、ロボットアーム2によって対象物の把持動作が行われていない状態で搬送部1の無人搬送車11による移動が行われている期間を指す。
次に、図2を用いて、本実施形態に係る移動ロボット100のハードウェア構成の一例について説明する。
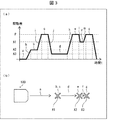
次に、図3を用いて、移動ロボット100の動作例を説明する。
以上、本発明の実施の形態を詳細に説明してきたが、上述の説明はあらゆる点において本発明の例示に過ぎない。本発明の範囲を逸脱することなく種々の改良及び変形を行うことができることは言うまでもない。例えば、以下のような変更が可能である。以下、変形例に係る移動ロボット1000について図4を参照して説明する。説明の便宜上、上述の実施形態と同様の部材に関しては同様の符号を用い、上述の実施形態と同様の点については、適宜説明を省略する。
本発明の態様1に係る移動ロボット100、1000は、無人搬送車11と、負圧により対象物を吸着することによって把持動作を行うロボットアーム2と、前記負圧を発生させる真空ポンプ4を制御する制御部(制御信号出力部12、120)であって、前記ロボットアーム2によって前記対象物の前記把持動作が行われている把持期間(第1の把持期間c、第2の把持期間e、第3の把持期間g)における前記真空ポンプ4の駆動量Pが、前記ロボットアーム2によって前記対象物の前記把持動作が行われていない状態で前記無人搬送車11による移動が行われている移動期間(第1の移動期間a、第2の移動期間d)における前記真空ポンプ4の駆動量A2、A3よりも大きくなるように制御を行う制御部(制御信号出力部12、120)と、を備える。
2 ロボットアーム
3 マニピュレータ制御部
4 真空ポンプ
5、55 バッテリー
6 切替回路
11 無人搬送車
12、120 制御信号出力部(制御部)
21 マニピュレータ部
22 吸着部
100、1000 移動ロボット
111 搬送制御部
121 アナログ信号出力部
1201 デジタル信号出力部
a 第1の移動期間(移動期間)
b 位置調整期間
c 第1の把持期間(把持期間)
d 第2の移動期間(移動期間)
e 第2の把持期間(把持期間)
f 第3の移動期間(移動期間)
g 第3の把持期間(把持期間)
h 第1の遷移期間(遷移期間)
i 第2の遷移期間(遷移期間)
j 第3の遷移期間(遷移期間)
k 第4の遷移期間(遷移期間)
l 第5の遷移期間(遷移期間)
m 第6の遷移期間(遷移期間)
X1 第1の作業位置
X2 第2の作業位置
X3 第3の作業位置
Claims (6)
- 無人搬送車と、
負圧により対象物を吸着することによって把持動作を行うロボットアームと、
前記負圧を発生させる真空ポンプを制御する制御部であって、前記ロボットアームによって前記対象物の前記把持動作が行われている把持期間における前記真空ポンプの駆動量が、前記ロボットアームによって前記対象物の前記把持動作が行われていない状態で前記無人搬送車による移動が行われている移動期間における前記真空ポンプの駆動量よりも大きくなるように制御を行う制御部と、
を備える移動ロボット。 - 前記制御部は、
前記無人搬送車による移動が停止しており、前記ロボットアームによって前記対象物の前記把持動作が行われる直前の期間において、前記ロボットアームの位置を調整する位置調整期間をさらに設け、
前記把持期間における前記真空ポンプの駆動量、前記位置調整期間における前記真空ポンプの駆動量、及び、前記移動期間における前記真空ポンプの駆動量が、この順で小さくなるように制御を行う請求項1に記載の移動ロボット。 - 前記制御部は、
前記移動期間における移動距離の長さに応じて、前記真空ポンプの駆動量を変更するように制御を行う請求項1又は2に記載の移動ロボット。 - 前記制御部は、アナログ信号を前記真空ポンプの制御信号として出力するアナログ信号出力部を備え、
前記アナログ信号出力部は、前記期間の遷移時に所定の遷移期間を設けるとともに、該遷移期間において、前記アナログ信号を単調増加又は単調減少させる制御を行う請求項1〜3のいずれか1項に記載の移動ロボット。 - 前記制御部から2値のデジタル信号を入力し、入力値に応じたアナログ信号を前記真空ポンプの制御信号として出力する切替回路をさらに備え、
前記制御部は、前記切替回路に対して前記デジタル信号を出力するデジタル信号出力部を備え、
前記デジタル信号出力部は、前記把持期間に第1の値のデジタル信号を出力し、前記移動期間に第2の値のデジタル信号を出力する請求項1〜3のいずれか1項に記載の移動ロボット。 - 前記制御部は、前記無人搬送車から受信する搬送状態信号に基づいて、前記期間を検知する請求項1〜5のいずれか1項に記載の移動ロボット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168032A JP6988747B2 (ja) | 2018-09-07 | 2018-09-07 | 移動ロボット |
| PCT/JP2019/034899 WO2020050345A1 (ja) | 2018-09-07 | 2019-09-05 | 移動ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168032A JP6988747B2 (ja) | 2018-09-07 | 2018-09-07 | 移動ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020040146A true JP2020040146A (ja) | 2020-03-19 |
| JP6988747B2 JP6988747B2 (ja) | 2022-01-05 |
Family
ID=69721513
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018168032A Active JP6988747B2 (ja) | 2018-09-07 | 2018-09-07 | 移動ロボット |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6988747B2 (ja) |
| WO (1) | WO2020050345A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH073987U (ja) * | 1993-06-08 | 1995-01-20 | シチズン時計株式会社 | 走行ロボット |
| JP2000110735A (ja) * | 1998-10-01 | 2000-04-18 | Internatl Business Mach Corp <Ibm> | ポンプ保護装置、ポンプ保護方法及びポンプ装置 |
| WO2007041003A2 (en) * | 2005-09-30 | 2007-04-12 | Photon Dynamics, Inc. | Vacuum gripping system for positioning large thin substrate on a support table |
| JP2009027976A (ja) * | 2007-07-26 | 2009-02-12 | National Agriculture & Food Research Organization | 把持装置 |
| JP2010075612A (ja) * | 2008-09-29 | 2010-04-08 | Panasonic Corp | 電気掃除機 |
| US20150032252A1 (en) * | 2013-07-25 | 2015-01-29 | IAM Robotics, LLC | System and method for piece-picking or put-away with a mobile manipulation robot |
| JP2016048474A (ja) * | 2014-08-27 | 2016-04-07 | シャープ株式会社 | 自律移動体及び自律移動体システム |
-
2018
- 2018-09-07 JP JP2018168032A patent/JP6988747B2/ja active Active
-
2019
- 2019-09-05 WO PCT/JP2019/034899 patent/WO2020050345A1/ja not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH073987U (ja) * | 1993-06-08 | 1995-01-20 | シチズン時計株式会社 | 走行ロボット |
| JP2000110735A (ja) * | 1998-10-01 | 2000-04-18 | Internatl Business Mach Corp <Ibm> | ポンプ保護装置、ポンプ保護方法及びポンプ装置 |
| WO2007041003A2 (en) * | 2005-09-30 | 2007-04-12 | Photon Dynamics, Inc. | Vacuum gripping system for positioning large thin substrate on a support table |
| JP2009027976A (ja) * | 2007-07-26 | 2009-02-12 | National Agriculture & Food Research Organization | 把持装置 |
| JP2010075612A (ja) * | 2008-09-29 | 2010-04-08 | Panasonic Corp | 電気掃除機 |
| US20150032252A1 (en) * | 2013-07-25 | 2015-01-29 | IAM Robotics, LLC | System and method for piece-picking or put-away with a mobile manipulation robot |
| JP2016048474A (ja) * | 2014-08-27 | 2016-04-07 | シャープ株式会社 | 自律移動体及び自律移動体システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020050345A1 (ja) | 2020-03-12 |
| JP6988747B2 (ja) | 2022-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9957116B2 (en) | Method for providing vacuum to a moving element | |
| WO2017104648A1 (ja) | 基板搬送ロボットおよびその運転方法 | |
| CA2708282A1 (en) | Power assist device and method of controlling the power assist device | |
| KR102146143B1 (ko) | 반송 베이스 및 반송 시스템 | |
| JPH10118969A (ja) | 搬送対象物吸着装置 | |
| JP5633555B2 (ja) | ロボットシステム | |
| JP5449856B2 (ja) | 半導体ウエハの搬送方法 | |
| CN109804461B (zh) | 半导体封装设备及其控制方法和控制装置 | |
| JP2020040146A (ja) | 移動ロボット | |
| WO2022137918A1 (ja) | ウエハ治具、ロボットシステム、通信方法、及びロボット教示方法 | |
| JP2005052919A (ja) | ワーク搬送装置の加速度制御方法 | |
| JP6204498B2 (ja) | 電子部品装着機 | |
| CN104418097A (zh) | 用于机器的处理站以及控制装置和控制方法 | |
| JP2004079569A (ja) | 基板搬送装置及び基板搬送方法 | |
| CN114174005A (zh) | 机器人的停止方法及机器人系统 | |
| JP2011245566A (ja) | チャック装置 | |
| CN105706012A (zh) | 伺服控制器 | |
| JP6326130B2 (ja) | 基板搬送装置 | |
| JP2016203201A (ja) | 自動プログラミング装置、ローダ装置、及び板材搬送方法 | |
| JP2008022044A (ja) | 回路部品装着システム | |
| JP2002307361A (ja) | 部材搬送装置及びその部材位置決め方法 | |
| JP2001219390A (ja) | 搬送装置 | |
| JP3179681B2 (ja) | 自動搬送ロボット | |
| KR20210043785A (ko) | 대상물 이송 장치 및 대상물 이송 방법 | |
| JP4508845B2 (ja) | 半導体製造装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211115 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6988747 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |