JP2020040480A - 車両の制御方法、車両システム及び車両の制御装置 - Google Patents
車両の制御方法、車両システム及び車両の制御装置 Download PDFInfo
- Publication number
- JP2020040480A JP2020040480A JP2018168655A JP2018168655A JP2020040480A JP 2020040480 A JP2020040480 A JP 2020040480A JP 2018168655 A JP2018168655 A JP 2018168655A JP 2018168655 A JP2018168655 A JP 2018168655A JP 2020040480 A JP2020040480 A JP 2020040480A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering
- torque
- steering wheel
- deceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
- B60W2710/0672—Torque change rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
- B60W2710/182—Brake pressure, e.g. of fluid or between pad and disc
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
これにより、ステアリングの取り付け位置及び操作方向によらずに、車両姿勢制御による運転席での前後加速度の立ち上がりをほぼ一定にすることができる。すなわち、本発明によれば、車両姿勢制御による運転席での前後加速度の立ち上がりの遅れを適切に解消することができる。以上より、本発明によれば、操舵角増加時において、車両姿勢制御により発生する前後加速度と横加速度との連動(バランス)を確保することができ、車両姿勢制御によるドライバの疲労軽減効果を適切に確保することが可能となる。
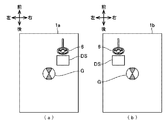
このように構成された本発明によれば、操舵角増加時において、右ハンドル車の運転席において車両姿勢制御による前後加速度を適切に発生させることができる。
このように構成された本発明によれば、操舵角増加時において、左ハンドル車の運転席において車両姿勢制御による前後加速度を適切に発生させることができる。
このように構成された本発明では、操舵装置の操舵角が減少したときに、つまりステアリングホイールが切り戻し操作されたときに、車両を加速させるための加速トルクを付加することで車両の姿勢を適切に制御することができる。
このように構成された本発明では、操舵角減少時において車両姿勢制御により付加する加速トルクを、ステアリングの車幅方向取り付け位置及びステアリングの操作方向に応じて変更する。よって、この車両姿勢制御による運転席での前後加速度の立ち上がりの遅れを適切に解消することができる。したがって、本発明によれば、操舵角減少時において、車両姿勢制御により発生する前後加速度と横加速度との連動(バランス)を確保することができ、車両姿勢制御によるドライバの疲労軽減効果を適切に確保することが可能となる。
このように構成された本発明によれば、操舵角減少時において、右ハンドル車の運転席において車両姿勢制御による前後加速度を適切に発生させることができる。
このように構成された本発明によれば、操舵角減少時において、左ハンドル車の運転席において車両姿勢制御による前後加速度を適切に発生させることができる。
<車両の構成>
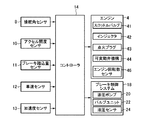
まず、図1及び図2を参照して、本発明の実施形態による車両の制御方法、車両システム及び車両の制御装置が適用された車両について説明する。図1は、本発明の実施形態による車両の全体構成を概略的に示すブロック図であり、図2は、本発明の実施形態による車両の電気的構成を示すブロック図である。
次に、本発明の実施形態による車両姿勢制御について説明する。
まず、図3を参照して、この車両姿勢制御の全体的な流れについて説明する。図3は、本発明の実施形態による車両姿勢制御処理のフローチャートである。
次に、図4及び図5を参照して、本発明の実施形態による減速トルク設定処理について説明する。図4は、本発明の実施形態による減速トルク設定処理のフローチャートであり、図5は、本発明の実施形態による付加減速度と操舵速度との関係を示したマップである。
次に、図8及び図9を参照して、本発明の実施形態による加速トルク設定処理について説明する。図8は、本発明の実施形態による加速トルク設定処理のフローチャートであり、図9は、本発明の実施形態による付加加速度と操舵速度との関係を示したマップである。
次に、上述した本発明の実施形態による作用及び効果について説明する。
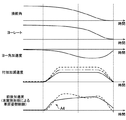
まず、本発明の実施形態による第1車両姿勢制御の作用について説明する。ここでは、本実施形態に対する比較例を挙げて、本実施形態の作用について具体的に説明する。上述したように、本実施形態では、ステアリング6の車幅方向取り付け位置及びステアリング6の操作方向に応じて、第1車両姿勢制御による減速トルクを変更していた、換言すると付加減速度を変更していた(図4のステップS14参照)。これに対して、比較例では、ステアリング6の取り付け位置及び操作方向に応じて、第1車両姿勢制御による付加減速度及び減速トルクを変更しない。
次に、本発明の実施形態による第2車両姿勢制御の作用について説明する。ここでは、本実施形態に対する比較例を挙げて、本実施形態の作用について具体的に説明する。上述したように、本実施形態では、ステアリング6の車幅方向取り付け位置及びステアリング6の操作方向に応じて、第2車両姿勢制御による加速トルクを変更していた、換言すると付加加速度を変更していた(図8のステップS24参照)。これに対して、比較例では、ステアリング6の取り付け位置及び操作方向に応じて、第2車両姿勢制御による付加加速度及び加速トルクを変更しない。
以上述べたように、本実施形態では、操舵角の増加(つまりステアリング6の切り込み操作)に応じて減速トルクを付加する第1車両姿勢制御を行うときに、ステアリング6の車幅方向取り付け位置及び操舵角増加時のステアリング6の操作方向に基づき、第1車両姿勢制御による減速トルクを変更する。これにより、ステアリング6の取り付け位置及び操作方向によらずに、第1車両姿勢制御による運転席DSでの前後加速度の立ち上がりをほぼ一定にすることができる。すなわち、本実施形態によれば、第1車両姿勢制御による運転席DSでの前後加速度の立ち上がりの遅れを適切に解消することができる。したがって、本実施形態によれば、第1車両姿勢制御により発生する前後加速度と横加速度との連動(バランス)を確保することができ、第1車両姿勢制御によるドライバの疲労軽減効果を適切に確保することが可能となる。
以下では、上述した実施形態の変形例について説明する。
上述した実施形態では、エンジン4がガソリンエンジンである場合について述べたが、他の例では、本発明はディーゼルエンジン(当該エンジンは点火プラグ43などを有しない)にも適用可能である。この例では、コントローラ14は、図3のステップS6において基本トルクから減速トルクを減算することにより最終目標トルクが設定された場合、つまり第1車両姿勢制御を行う場合には、ディーゼルエンジンのインジェクタによる燃料噴射量を、基本トルクを発生させるための燃料噴射量よりも減少させればよい。これに対して、コントローラ14は、ステップS6において基本トルクに加速トルクを加算することにより最終目標トルクが設定された場合、つまり第2車両姿勢制御を行う場合には、インジェクタによる燃料噴射量を、基本トルクを発生させるための燃料噴射量よりも増加させればよい。
上述した実施形態では、ステアリング6の車幅方向取り付け位置及びステアリング6の操作方向に応じて、付加減速度及び付加加速度を変更して、変更後の付加減速度及び付加加速度に基づき減速トルク及び加速トルクを設定していた。この実施形態では、ステアリング6の取り付け位置及び操作方向に応じて、減速トルク及び加速トルクを間接的に変更していたことになる。他の例では、付加減速度及び付加加速度を変更せずに、ステアリング6の取り付け位置及び操作方向に応じて、減速トルク及び加速トルクを直接的に変更してもよい。
上述した実施形態では、操舵角及び操舵速度に基づき車両姿勢制御を実行していたが、他の例では、操舵角及び操舵速度の代わりに、ヨーレートや横加速度やヨー加速度や横ジャークに基づき車両姿勢制御を実行してもよい。
4 エンジン
5 操舵装置
6 ステアリングホイール
8 操舵角センサ
10 アクセル開度センサ
12 車速センサ
13 加速度センサ
14 コントローラ
16 ブレーキ装置
18 ブレーキ制御システム
41 スロットルバルブ
42 インジェクタ
43 点火プラグ
DS 運転席
G 重心位置
Claims (12)
- 原動機により前輪が駆動される車両を制御する方法であって、
前記車両の運転状態に基づき、前記原動機が発生すべき基本トルクを設定する基本トルク設定工程と、
前記車両に搭載された操舵装置の操舵角の増加に基づいて、減速トルクを設定する減速トルク設定工程と、
前記基本トルク及び前記減速トルクに基づくトルクが発生するように前記原動機を制御するトルク発生工程と、
前記操舵装置のステアリングホイールの車幅方向取り付け位置と、前記操舵角の増加時における前記ステアリングホイールの操作方向とに基づき、前記減速トルクを変更する減速トルク変更工程と、
を有することを特徴とする車両の制御方法。 - 前記車両は、前記ステアリングホイールが当該車両の幅方向中心よりも右側に取り付けられた右ハンドル車であり、
前記減速トルク変更工程では、前記操舵角の増加時において、前記ステアリングホイールが前記車両を左旋回させる方向に操作されたときには、前記ステアリングホイールが前記車両を右旋回させる方向に操作されたときよりも、前記減速トルクを大きくする、
請求項1に記載の車両の制御方法。 - 前記車両は、前記ステアリングホイールが当該車両の幅方向中心よりも左側に取り付けられた左ハンドル車であり、
前記減速トルク変更工程では、前記操舵角の増加時において、前記ステアリングホイールが前記車両を左旋回させる方向に操作されたときには、前記ステアリングホイールが前記車両を右旋回させる方向に操作されたときよりも、前記減速トルクを小さくする、
請求項1に記載の車両の制御方法。 - 前記操舵装置の操舵角の減少に基づいて、加速トルクを設定する加速トルク設定工程を更に有し、
前記トルク発生工程は、前記基本トルク及び前記加速トルクに基づくトルクが発生するように前記原動機を制御する、
請求項1乃至3のいずれか一項に記載の車両の制御方法。 - 前記ステアリングホイールの車幅方向取り付け位置と、前記操舵角の減少時における前記ステアリングホイールの操作方向とに基づき、前記加速トルクを変更する加速トルク変更工程を更に有する、請求項4に記載の車両の制御方法。
- 前記車両は、前記ステアリングホイールが当該車両の幅方向中心よりも右側に取り付けられた右ハンドル車であり、
前記加速トルク変更工程では、前記操舵角の減少時において、前記ステアリングホイールが前記車両を左旋回させる方向に操作されたときには、前記ステアリングホイールが前記車両を右旋回させる方向に操作されたときよりも、前記加速トルクを小さくする、
請求項5に記載の車両の制御方法。 - 前記車両は、前記ステアリングホイールが当該車両の幅方向中心よりも左側に取付けられた左ハンドル車であり、
前記加速トルク変更工程では、前記操舵角の減少時において、前記ステアリングホイールが前記車両を左旋回させる方向に操作されたときには、前記ステアリングホイールが前記車両を右旋回させる方向に操作されたときよりも、前記加速トルクを大きくする、
請求項5に記載の車両の制御方法。 - 車輪に制動トルクを付加する制動装置を有する車両を制御する方法であって、
前記車両に搭載された操舵装置の操舵角の増加に基づいて、減速トルクを設定する減速トルク設定工程と、
前記減速トルクに基づく制動トルクが発生するように前記制動装置を制御するトルク発生工程と、
前記操舵装置のステアリングホイールの車幅方向取り付け位置と、前記操舵角の増加時における前記ステアリングホイールの操作方向とに基づき、前記減速トルクを変更する減速トルク変更工程と、
を有することを特徴とする車両の制御方法。 - 車両を制御するシステムであって、
前記車両の前輪を駆動する原動機と、
前記車両を操舵するためのステアリングホイールを備える操舵装置と、
前記操舵装置の操舵角を検出する操舵角センサと、
前記車両の運転状態を検出する運転状態センサと、
前記原動機を制御する制御器と、を有し、
前記制御器は、
前記運転状態センサにより検出された運転状態に基づき、前記原動機が発生すべき基本トルクを設定し、
前記操舵角センサにより検出された操舵角の増加に基づいて、減速トルクを設定し、
前記基本トルク及び前記減速トルクに基づくトルクが発生するように前記原動機を制御し、
前記ステアリングホイールの車幅方向取り付け位置と、前記操舵角の増加時における前記ステアリングホイールの操作方向とに基づき、前記減速トルクを変更するよう構成されている、
ことを特徴とする車両システム。 - 車両を制御するシステムであって、
前記車両の車輪に制動トルクを付加する制動装置と、
前記車両を操舵するためのステアリングホイールを備える操舵装置と、
前記操舵装置の操舵角を検出する操舵角センサと、
前記制動装置を制御する制御器と、を有し、
前記制御器は、
前記操舵角センサにより検出された操舵角の増加に基づいて、減速トルクを設定し、
前記減速トルクに基づく制動トルクが発生するように前記制動装置を制御し、
前記ステアリングホイールの車幅方向取り付け位置と、前記操舵角の増加時における前記ステアリングホイールの操作方向とに基づき、前記減速トルクを変更するよう構成されている、
ことを特徴とする車両システム。 - ステアリングホイールを備える操舵装置を有し、このステアリングホイールが車両の幅方向中心よりも右側に取り付けられた右ハンドル車として構成された車両を制御する装置であって、
前記操舵装置の操舵角が増加したときに、前記車両に減速度を付加して車両姿勢を制御する車両姿勢制御手段と、
前記操舵角の増加時における前記ステアリングホイールの操作方向に基づき、前記車両姿勢制御手段により付加される前記減速度を変更する減速度変更手段と、
を有することを特徴とする車両の制御装置。 - ステアリングホイールを備える操舵装置を有し、このステアリングホイールが車両の幅方向中心よりも左側に取り付けられた左ハンドル車として構成された車両を制御する装置であって、
前記操舵装置の操舵角が増加したときに、前記車両に減速度を付加して車両姿勢を制御する車両姿勢制御手段と、
前記操舵角の増加時における前記ステアリングホイールの操作方向に基づき、前記車両姿勢制御手段により付加される前記減速度を変更する減速度変更手段と、
を有することを特徴とする車両の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168655A JP7185218B2 (ja) | 2018-09-10 | 2018-09-10 | 車両の制御方法、車両システム及び車両の制御装置 |
| PCT/JP2019/034753 WO2020054534A1 (ja) | 2018-09-10 | 2019-09-04 | 車両の制御方法、車両システム及び車両の制御装置 |
| CN201980058197.5A CN112654542B (zh) | 2018-09-10 | 2019-09-04 | 车辆的控制方法、车辆系统以及车辆的控制装置 |
| US17/273,719 US12049216B2 (en) | 2018-09-10 | 2019-09-04 | Vehicle control method, vehicle system, and vehicle control apparatus |
| DE112019004518.0T DE112019004518T5 (de) | 2018-09-10 | 2019-09-04 | Fahrzeugsteuer- bzw. Regelverfahren, Fahrzeugsystem und Fahrzeugsteuer- bzw. Regeleinrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168655A JP7185218B2 (ja) | 2018-09-10 | 2018-09-10 | 車両の制御方法、車両システム及び車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020040480A true JP2020040480A (ja) | 2020-03-19 |
| JP7185218B2 JP7185218B2 (ja) | 2022-12-07 |
Family
ID=69777636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018168655A Active JP7185218B2 (ja) | 2018-09-10 | 2018-09-10 | 車両の制御方法、車両システム及び車両の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12049216B2 (ja) |
| JP (1) | JP7185218B2 (ja) |
| CN (1) | CN112654542B (ja) |
| DE (1) | DE112019004518T5 (ja) |
| WO (1) | WO2020054534A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021212274A1 (zh) * | 2020-04-20 | 2021-10-28 | 南京天擎汽车电子有限公司 | 疲劳驾驶状态检测方法、装置、计算机设备和存储介质 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006335171A (ja) * | 2005-06-01 | 2006-12-14 | Toyota Motor Corp | 車輌の制駆動力制御装置 |
| US20090030574A1 (en) * | 2007-07-26 | 2009-01-29 | Hitachi, Ltd. | Drive Controlling Apparatus For A Vehicle |
| US20090272592A1 (en) * | 2008-05-05 | 2009-11-05 | Gm Global Technology Operations, Inc. | System and method for integrating a torque vectoring differential with a stability control system |
| JP5143103B2 (ja) * | 2009-09-30 | 2013-02-13 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| JP2016068649A (ja) * | 2014-09-29 | 2016-05-09 | 日立オートモティブシステムズ株式会社 | 車両の運動制御方法、装置、および、それを搭載した車両 |
| JP2017193318A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017193317A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017193316A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017194045A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2019142469A (ja) * | 2018-02-19 | 2019-08-29 | マツダ株式会社 | 車両の制御装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4729907B2 (ja) * | 2004-11-22 | 2011-07-20 | 日産自動車株式会社 | 車両用操舵装置およびその操舵トルク制御方法 |
| JP5251216B2 (ja) * | 2007-07-31 | 2013-07-31 | 日産自動車株式会社 | 車両用走行制御装置および車両用走行制御方法 |
| JP5286027B2 (ja) * | 2008-10-28 | 2013-09-11 | 株式会社アドヴィックス | 車両安定化制御装置 |
| JP5710386B2 (ja) * | 2011-06-02 | 2015-04-30 | 日立建機株式会社 | 電気駆動ダンプトラック |
| JP6252993B2 (ja) * | 2015-11-06 | 2017-12-27 | マツダ株式会社 | 車両用挙動制御装置 |
-
2018
- 2018-09-10 JP JP2018168655A patent/JP7185218B2/ja active Active
-
2019
- 2019-09-04 WO PCT/JP2019/034753 patent/WO2020054534A1/ja not_active Ceased
- 2019-09-04 DE DE112019004518.0T patent/DE112019004518T5/de active Pending
- 2019-09-04 US US17/273,719 patent/US12049216B2/en active Active
- 2019-09-04 CN CN201980058197.5A patent/CN112654542B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006335171A (ja) * | 2005-06-01 | 2006-12-14 | Toyota Motor Corp | 車輌の制駆動力制御装置 |
| US20090030574A1 (en) * | 2007-07-26 | 2009-01-29 | Hitachi, Ltd. | Drive Controlling Apparatus For A Vehicle |
| US20090272592A1 (en) * | 2008-05-05 | 2009-11-05 | Gm Global Technology Operations, Inc. | System and method for integrating a torque vectoring differential with a stability control system |
| JP5143103B2 (ja) * | 2009-09-30 | 2013-02-13 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| JP2016068649A (ja) * | 2014-09-29 | 2016-05-09 | 日立オートモティブシステムズ株式会社 | 車両の運動制御方法、装置、および、それを搭載した車両 |
| JP2017193318A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017193317A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017193316A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2017194045A (ja) * | 2016-04-22 | 2017-10-26 | マツダ株式会社 | 車両用挙動制御装置 |
| JP2019142469A (ja) * | 2018-02-19 | 2019-08-29 | マツダ株式会社 | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112654542B (zh) | 2023-06-23 |
| US12049216B2 (en) | 2024-07-30 |
| JP7185218B2 (ja) | 2022-12-07 |
| US20210316717A1 (en) | 2021-10-14 |
| DE112019004518T5 (de) | 2021-06-02 |
| WO2020054534A1 (ja) | 2020-03-19 |
| CN112654542A (zh) | 2021-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7038971B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| US20210039624A1 (en) | Control method for vehicle, vehicle system, and vehicle controller | |
| US11529991B2 (en) | Control system for vehicle | |
| JP6521491B1 (ja) | 車両の制御装置 | |
| JP7008944B2 (ja) | 車両システム | |
| JP7034438B2 (ja) | 車両の制御方法及び車両システム | |
| JP7185219B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP7185218B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP7080443B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP7138847B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP7038972B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP6997413B2 (ja) | 車両の制御装置 | |
| JP7034437B2 (ja) | 車両の制御方法及び車両システム | |
| US20210197797A1 (en) | Control system for vehicle | |
| JP2019188905A (ja) | 車両の制御装置 | |
| JP6999092B2 (ja) | 車両の制御装置 | |
| JP6940816B2 (ja) | 車両の制御装置 | |
| JP6988557B2 (ja) | 車両の制御方法、車両システム及び車両の制御装置 | |
| JP7008945B2 (ja) | 車両の制御方法及び車両システム | |
| JP7026886B2 (ja) | 車両の制御装置 | |
| JP7069523B2 (ja) | 車両の制御装置 | |
| JP2020019382A (ja) | 車両の制御方法及び車両システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221017 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7185218 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |