JP5286027B2 - 車両安定化制御装置 - Google Patents
車両安定化制御装置 Download PDFInfo
- Publication number
- JP5286027B2 JP5286027B2 JP2008277467A JP2008277467A JP5286027B2 JP 5286027 B2 JP5286027 B2 JP 5286027B2 JP 2008277467 A JP2008277467 A JP 2008277467A JP 2008277467 A JP2008277467 A JP 2008277467A JP 5286027 B2 JP5286027 B2 JP 5286027B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- curve
- pass
- target
- stably
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000006641 stabilisation Effects 0.000 title claims description 36
- 238000011105 stabilization Methods 0.000 title claims description 36
- 238000004364 calculation method Methods 0.000 claims description 106
- 230000001133 acceleration Effects 0.000 claims description 53
- 230000001629 suppression Effects 0.000 description 30
- 230000005540 biological transmission Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/16—Curve braking control, e.g. turn control within ABS control algorithm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/30—Environment conditions or position therewithin
- B60T2210/36—Global Positioning System [GPS]
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
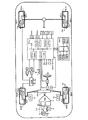
図1は、本発明の実施形態に係る車両安定化制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。本装置は、車両の動力源であるエンジンEGと、自動変速機TMと、ブレーキアクチュエータBRKと、電子制御ユニットECUと、ナビゲーション装置NAVとを備えている。
以下、図4を参照しながら、本装置により実行される車両安定化制御の概要について説明する。
次に、図5を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の一例について詳細に説明する。図5は、前述の横加速度Gyeを使用して判定値Fgが演算される場合の一例を示す。
Gye=Vx2/Rm
次に、図6を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の他の例について詳細に説明する。図6は、前述の目標車速Vtを使用して判定値Fgが演算される場合の一例を示す。
次に、図7を参照しながら、目標制御量演算手段A4による目標制御量Bt**の演算の一例について詳細に説明する。
次に、図8を参照しながら、制御手段A5の車輪ブレーキ制御手段A52による車輪ブレーキ制御について詳細に説明する。
計算横加速度 Gye=Vx2/Rvh
計算ヨーレイト Yre=Vx/Rvh
計算操舵角度 δfe=〔L・(1+Kh・Vx2)〕/Rvh
計算ステアリングホイール角度 θswe=〔SG・L・(1+Kh・Vx2)〕/Rvh
計算車輪速度差 ΔVwe=(Tr・Vx)/Rvh
計算方位角Yae(カーブ入口手前の直線部の方向に対する車両位置Pvhにおけるカーブの接線方向)
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、Trは車両のトレッド、SGは車両のステアリングギア比である。
Rta=Vx2/Gya
Rta=Vx/Yra
Rta=〔L・(1+Kh・Vx2)〕/δfa
Rta=〔SG・L・(1+Kh・Vx2)〕/θswa
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、SGは車両のステアリングギア比である。
Claims (8)
- 車両の実際の旋回状態を表す実旋回状態量を取得する実旋回状態量取得手段と、
前記実旋回状態量に基づいて、前記車両のアンダステアが抑制されるように前記車両の各車輪の制動力を制御するための前記各車輪の目標制御量を演算する制御量演算手段と、
前記各車輪の目標制御量に基づいて前記各車輪の制動力を制御する制御手段と、
を備えた車両安定化制御装置であって、
前記車両の進行方向前方にあるカーブの形状を取得するカーブ情報取得手段と、
前記車両の速度を取得する車速取得手段と、
前記カーブ形状と前記車両の速度とに基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するカーブ通過可否判定手段と、
を備え、
前記制御量演算手段は、
前記車両が前記カーブを安定して通過できる可能性に応じて前記各車輪の目標制御量を調整するように構成され、
前記制御量演算手段は、
前記各車輪の目標制御量の演算について、前記車両の減速よりも前記車両へのヨーモーメントの付与を優先する第1演算特性と、前記車両へのヨーモーメントの付与よりも前記車両の減速を優先する第2演算特性と、を備えるとともに、
前記車両が前記カーブを安定して通過できる可能性が高い場合には前記第1演算特性を使用して前記各車輪の目標制御量を演算し、前記車両が前記カーブを安定して通過できる可能性が低い場合には前記第2演算特性を使用して前記各車輪の目標制御量を演算するように構成された、車両安定化制御装置。 - 請求項1に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記カーブ形状と前記車両の速度とに基づいて、前記車両に作用する横加速度を演算するとともに、前記演算された横加速度に基づいて前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。 - 請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第1所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第1所定値よりも大きい場合、前記演算された横加速度と前記第1所定値との差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記演算された横加速度が前記第1所定値よりも大きい第2所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。 - 請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第3所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第3所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。 - 請求項1に記載の車両安定化制御装置であって、
前記カーブ情報取得手段は、前記カーブ形状に対応する前記カーブ内の位置を取得するように構成されていて、
前記車両の位置を取得する車両位置取得手段と、
前記カーブ形状に対応する位置、前記カーブ形状、及び前記車両位置に基づいて、前記車両が前記カーブを安定して通過するための目標車速を演算する目標車速演算手段と、
を備え、
前記カーブ通過可否判定手段は、
前記目標車速と前記車両の速度との比較結果に基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。 - 請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第4所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第4所定値よりも大きい場合、前記車速偏差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記車速偏差が前記第4所定値よりも大きい第5所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。 - 請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第6所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第6所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。 - 請求項1乃至請求項7の何れか一項に記載の車両安定化制御装置であって、
前記車両の操向車輪の舵角に相当する値を取得する舵角取得手段と、
前記車両の速度と前記舵角に相当する値とに基づいて、前記実旋回状態量に対応する目標旋回状態量を演算する目標旋回状態量演算手段と、
前記目標旋回状態量と前記実旋回状態量とを比較することで前記車両のステア特性を表すステア特性値を演算するステア特性値演算手段と、
を備え、
前記制御量演算手段は、
前記ステア特性値がしきい値以下の場合に前記各車輪の目標制御量をゼロに演算し、前記ステア特性値が前記しきい値よりも大きい場合に前記各車輪の目標制御量をゼロより大きい値に演算するとともに、
前記車両が前記カーブを安定して通過できる可能性が低いほど、前記しきい値をより小さい値に設定するように構成された車両安定化制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008277467A JP5286027B2 (ja) | 2008-10-28 | 2008-10-28 | 車両安定化制御装置 |
| EP09011936A EP2181903B1 (en) | 2008-10-28 | 2009-09-18 | Vehicle stabilization control device |
| US12/570,722 US8224526B2 (en) | 2008-10-28 | 2009-09-30 | Vehicle stabilization control device |
| CN200910206076.9A CN101722952B (zh) | 2008-10-28 | 2009-10-20 | 车辆稳定控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008277467A JP5286027B2 (ja) | 2008-10-28 | 2008-10-28 | 車両安定化制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010105453A JP2010105453A (ja) | 2010-05-13 |
| JP5286027B2 true JP5286027B2 (ja) | 2013-09-11 |
Family
ID=41571451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008277467A Expired - Fee Related JP5286027B2 (ja) | 2008-10-28 | 2008-10-28 | 車両安定化制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8224526B2 (ja) |
| EP (1) | EP2181903B1 (ja) |
| JP (1) | JP5286027B2 (ja) |
| CN (1) | CN101722952B (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009040308A (ja) * | 2007-08-10 | 2009-02-26 | Denso Corp | 路面勾配推定装置、車両用制御装置、及び車両用制御システム |
| JP4636062B2 (ja) * | 2007-08-27 | 2011-02-23 | トヨタ自動車株式会社 | 車両の挙動制御装置 |
| US8600638B2 (en) | 2009-01-15 | 2013-12-03 | Toyota Jidosha Kabushiki Kaisha | Vehicle stabilization controlling apparatus |
| DE112009005073B4 (de) * | 2009-07-17 | 2018-06-21 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugverhaltenssteuervorrichtung |
| JP5285787B2 (ja) * | 2009-12-25 | 2013-09-11 | ヤマハ発動機株式会社 | ライダー特性判定装置およびそれを備えた鞍乗り型車両 |
| JP5378318B2 (ja) * | 2010-07-30 | 2013-12-25 | 日立オートモティブシステムズ株式会社 | 車両運動制御装置 |
| JP5429126B2 (ja) * | 2010-10-01 | 2014-02-26 | トヨタ自動車株式会社 | 走行支援装置及び方法 |
| EP2627525B1 (en) * | 2010-10-15 | 2015-08-26 | Robert Bosch GmbH | Continuous correction for steering wheel angle offset |
| JP5588388B2 (ja) * | 2011-03-25 | 2014-09-10 | 株式会社豊田中央研究所 | 操舵装置 |
| CN103813950B (zh) * | 2011-07-19 | 2017-03-08 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于改善行驶稳定性的方法 |
| US20150246654A1 (en) * | 2012-01-13 | 2015-09-03 | Pulse Function F6 Ltd | Telematics system with 3d intertial sensors |
| JP5668746B2 (ja) * | 2012-12-26 | 2015-02-12 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6036371B2 (ja) * | 2013-02-14 | 2016-11-30 | 株式会社デンソー | 車両用運転支援システム及び運転支援方法 |
| US9511681B2 (en) * | 2013-05-09 | 2016-12-06 | Rockwell Automation, Inc. | Controlled motion system having an improved track configuration |
| EP2853458B1 (en) * | 2013-09-30 | 2019-12-18 | Hitachi, Ltd. | Method and apparatus for performing driving assistance |
| JP6330465B2 (ja) * | 2014-05-12 | 2018-05-30 | 株式会社デンソー | 運転支援装置 |
| JP6350003B2 (ja) * | 2014-06-19 | 2018-07-04 | 三菱自動車工業株式会社 | 車両の制御装置 |
| EP3246221B1 (en) * | 2015-01-13 | 2019-12-04 | Honda Motor Co., Ltd. | Control system, control method and recording medium for a driving device |
| DE102016204018A1 (de) * | 2016-03-11 | 2017-09-14 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung der Querneigung einer Fahrbahn |
| US10029679B2 (en) * | 2016-08-09 | 2018-07-24 | Ford Global Technologies, Llc | Controlling skidding vehicles |
| JP6565054B2 (ja) * | 2016-08-23 | 2019-08-28 | 株式会社 三英技研 | 走行軌道作成装置、方法及びプログラム、並びに、運転支援装置及びシステム |
| US20200242938A1 (en) | 2017-08-08 | 2020-07-30 | Pioneer Corporation | Determination device, determination method and program |
| CA3073798C (en) * | 2017-08-24 | 2021-05-04 | Nissan Motor Co., Ltd. | Method and device for controlling travel of drive-assisted vehicle |
| JP6962076B2 (ja) * | 2017-09-01 | 2021-11-05 | 株式会社デンソー | 車両運転制御装置およびその制御方法 |
| JP6990622B2 (ja) * | 2018-04-26 | 2022-01-12 | 日立Astemo株式会社 | 制駆動力制御装置、車両制御方法および車両制御システム |
| JP7185218B2 (ja) * | 2018-09-10 | 2022-12-07 | マツダ株式会社 | 車両の制御方法、車両システム及び車両の制御装置 |
| JP6734905B2 (ja) * | 2018-11-07 | 2020-08-05 | 本田技研工業株式会社 | 車両挙動安定化装置 |
| KR102654528B1 (ko) * | 2018-12-07 | 2024-04-03 | 현대자동차주식회사 | 자동차용 선회 주행 제어 시스템 및 방법 |
| JP7310169B2 (ja) * | 2019-02-25 | 2023-07-19 | 株式会社アドヴィックス | 車両の制動制御装置 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08205306A (ja) * | 1995-01-27 | 1996-08-09 | Fuji Heavy Ind Ltd | 車両の警報装置 |
| JPH10141102A (ja) * | 1996-11-12 | 1998-05-26 | Honda Motor Co Ltd | 車両制御装置 |
| JP3425727B2 (ja) * | 1997-03-14 | 2003-07-14 | 三菱ふそうトラック・バス株式会社 | 車両の自動ブレーキ装置 |
| JP3378490B2 (ja) | 1998-01-29 | 2003-02-17 | 富士重工業株式会社 | 道路情報認識装置 |
| JP4037506B2 (ja) * | 1998-03-12 | 2008-01-23 | 富士重工業株式会社 | 車両運動制御装置 |
| US6269308B1 (en) * | 1998-08-20 | 2001-07-31 | Honda Giken Kogyo Kabushiki Kaisha | Safety running system for vehicle |
| JP3349120B2 (ja) * | 1999-09-09 | 2002-11-20 | 富士重工業株式会社 | カーブ進入制御装置 |
| JP2001312798A (ja) * | 2000-04-28 | 2001-11-09 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP4219126B2 (ja) | 2002-08-06 | 2009-02-04 | 株式会社アドヴィックス | 車両の運動制御装置 |
| US7676314B2 (en) * | 2002-08-06 | 2010-03-09 | Advics Co., Ltd. | Motion control apparatus for a vehicle |
| JP3990623B2 (ja) * | 2002-11-19 | 2007-10-17 | 富士重工業株式会社 | 車両挙動制御装置 |
| JP2004233331A (ja) | 2002-12-04 | 2004-08-19 | Sumitomo Rubber Ind Ltd | 車輪力検出装置及び車輪力検出方法 |
| JP2005104346A (ja) * | 2003-09-30 | 2005-04-21 | Mitsubishi Fuso Truck & Bus Corp | 車両のスタビリティファクタ学習方法及び学習装置並びに車両用制御装置 |
| JP2005271822A (ja) * | 2004-03-25 | 2005-10-06 | Mitsubishi Fuso Truck & Bus Corp | 車両の自動減速制御装置 |
| JP4326390B2 (ja) * | 2004-03-31 | 2009-09-02 | 本田技研工業株式会社 | 車両の運動制御装置 |
| JP3979400B2 (ja) * | 2004-04-23 | 2007-09-19 | 日産自動車株式会社 | 前方道路対応制御装置 |
| JP4252487B2 (ja) * | 2004-04-23 | 2009-04-08 | 日産自動車株式会社 | 減速制御装置 |
| JP4762528B2 (ja) * | 2004-11-10 | 2011-08-31 | 本田技研工業株式会社 | 車両の走行安全装置 |
| JP2006175898A (ja) * | 2004-12-20 | 2006-07-06 | Fuji Heavy Ind Ltd | 車両の挙動制御装置 |
| JP4742818B2 (ja) * | 2005-11-07 | 2011-08-10 | 日産自動車株式会社 | 車両用減速制御装置 |
| JP2007245901A (ja) | 2006-03-15 | 2007-09-27 | Hitachi Ltd | 車両運動制御装置 |
| JP2008024073A (ja) | 2006-07-19 | 2008-02-07 | Nsk Ltd | 電動パワーステアリング装置 |
| JP4860391B2 (ja) * | 2006-07-27 | 2012-01-25 | 本田技研工業株式会社 | 車両の走行安全装置 |
| JP2008277467A (ja) | 2007-04-27 | 2008-11-13 | Mitsui Chemicals Inc | 有機トランジスタ |
-
2008
- 2008-10-28 JP JP2008277467A patent/JP5286027B2/ja not_active Expired - Fee Related
-
2009
- 2009-09-18 EP EP09011936A patent/EP2181903B1/en not_active Not-in-force
- 2009-09-30 US US12/570,722 patent/US8224526B2/en not_active Expired - Fee Related
- 2009-10-20 CN CN200910206076.9A patent/CN101722952B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP2181903A1 (en) | 2010-05-05 |
| EP2181903B1 (en) | 2013-03-20 |
| CN101722952B (zh) | 2014-03-12 |
| US20100106374A1 (en) | 2010-04-29 |
| US8224526B2 (en) | 2012-07-17 |
| JP2010105453A (ja) | 2010-05-13 |
| CN101722952A (zh) | 2010-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5286027B2 (ja) | 車両安定化制御装置 | |
| JP5468549B2 (ja) | 車両の走行制御装置 | |
| JP5257923B2 (ja) | 車両の運動制御装置 | |
| JP5363906B2 (ja) | 車両の速度制御装置 | |
| JP5137764B2 (ja) | 車両の速度制御装置 | |
| US8428842B2 (en) | Speed control device for vehicle | |
| US8195371B2 (en) | Motion control device for vehicle | |
| US9823111B2 (en) | Method and device for estimating loading state of vehicle | |
| JP5546106B2 (ja) | 車両の運動制御装置 | |
| JP2003312319A (ja) | 車両の運動制御装置 | |
| JP5341469B2 (ja) | 車両の制御装置 | |
| JP2003312465A (ja) | 車輪のグリップ度推定装置、及び該装置を備えた車両の運動制御装置 | |
| JP5572184B2 (ja) | 車両の運動制御装置 | |
| JP5122307B2 (ja) | 車両の運動制御装置 | |
| JP5363907B2 (ja) | 車両の速度制御装置 | |
| JP5420263B2 (ja) | 車両のシート制御装置 | |
| JP4929196B2 (ja) | 車両の運動制御装置 | |
| JP2006117154A (ja) | 車両の運動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130603 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5286027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |