JP2020182402A - 走行制御装置、走行制御方法および草刈機 - Google Patents
走行制御装置、走行制御方法および草刈機 Download PDFInfo
- Publication number
- JP2020182402A JP2020182402A JP2019087529A JP2019087529A JP2020182402A JP 2020182402 A JP2020182402 A JP 2020182402A JP 2019087529 A JP2019087529 A JP 2019087529A JP 2019087529 A JP2019087529 A JP 2019087529A JP 2020182402 A JP2020182402 A JP 2020182402A
- Authority
- JP
- Japan
- Prior art keywords
- predetermined
- work
- rotation speed
- traveling
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Guiding Agricultural Machines (AREA)
- Harvester Elements (AREA)
Abstract
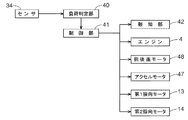
【解決手段】原動機4の駆動力により走行しながら原動機4の駆動力により作業を行う作業走行が可能な作業機の走行制御装置であって、原動機4からの出力の回転数を検出するセンサ34と、回転数から作業負荷が高負荷状態であるか否かを判定する負荷判定部40と、作業負荷が高負荷状態である場合に、所定の対応処置を行う制御部41とを備える。
【選択図】図6
Description
また、前記作業は、作業領域の走行経路を順に走行しながら行われ、前記所定の対応処置は、走行中の前記走行経路を、走行済みの前記走行経路の方向に所定の第2の距離ずらす走行であっても良い。
図1及び図2に示すように、草刈機において、刈刃ハウジング1が備えられて、刈刃ハウジング1に刈刃2が収容されており、刈刃ハウジング1に伝動ケース3及びエンジン4(原動部に相当)が支持されている。
図1及び図2に示すように、前側及び後側のフレーム8が、左右方向に沿って刈刃ハウジング1に連結されており、フレーム9が、前後方向に沿って前側及び後側のフレーム8に亘って連結されている。
平面視で、エンジン4が刈刃ハウジング1の左右中央CLから右側に変位して配置された状態となっており、エンジン4が右の車輪5の間に配置されている。前後方向視で、右の車輪5の上部と、エンジン4の下部とが重複するように、エンジン4が低い位置に配置されている。
図3に示すように、エンジン4の出力軸4aの動力が、伝動ケース3の内部の遠心クラッチ16及びブレーキ17を介して、伝動軸18に伝達され、伝動軸18から伝動ベルト19を介して発電機20に伝達される。
図3に示すように、伝動ケース3の内部において、伝動軸21にウォーム機構24が備えられている。伝動軸21の動力が、ウォーム機構24から伝動軸25、変速装置26、伝動軸27を介して、前後進切換装置28に伝達される。伝動ケース3の外部において、前後進切換装置28の動力が、トルクリミッター29及び伝動チェーン30を介して、伝動軸31に伝達される。
この草刈機は、無線操縦による遠隔操作型である。
図5に示すように、草刈機は、刈刃ハウジング1に、制御装置44、受信機45及び作業者が操作する運転停止スイッチ46、エンジン4のアクセル4b及びブレーキ17を操作するアクセルモータ47、前後進切換装置28を操作する前後進モータ48を備える。
エンジン4のアイドリング状態で、遠心クラッチ16(図3参照)が遮断状態であり、ブレーキ17が制動状態である。アクセルモータ47により、ブレーキ17が解除状態に操作され、エンジン4のアクセル4bが高速側に操作されて、遠心クラッチ16(図3参照)が伝動状態となる。
(2)一方側の右及び左の車輪5,6を直進位置に固定した状態で、第2操向モータ14により他方側の右及び左の車輪5,6を操向操作する第2操向モード。
(4)第1操向モータ13及び第2操向モータ14により、一方側及び他方側の右及び左の車輪5,6を互いに逆向きに操向操作して草刈機を小回り旋回させる逆位相モード。
このような作業走行において、ステアリングアシスト制御が行われても良い。ステアリングアシスト制御は、最初の走行経路を自動走行した後、2列目以降の走行経路を、最初の走行経路に倣って生成して自動走行する制御である。
図6に示すように、本実施形態の草刈機は、負荷判定部40と制御部41とを備える。なお、負荷判定部40および制御部41は、EUCやCPU等のプロセッサを含むハードウェアで構成することもできるし、少なくとも一部の機能をソフトウェアで構成することもできる。また、負荷判定部40および制御部41は一つの機能部で構成することもできるし、複数の機能部を組み合わせて負荷判定部40および制御部41を構成することもできる。また、制御部41または、負荷判定部40および制御部41は、前述の制御装置44により実現されても良い。
34 センサ
40 負荷判定部
41 制御部
Claims (17)
- 原動機の駆動力により走行しながら前記原動機の駆動力により作業を行う作業走行が可能な作業機の走行制御装置であって、
前記原動機からの出力の回転数を検出するセンサと、
前記回転数から作業負荷が高負荷状態であるか否かを判定する負荷判定部と、
前記作業負荷が前記高負荷状態である場合に、所定の対応処置を行う制御部とを備える走行制御装置。 - 前記高負荷状態は、前記作業走行が開始されてからの前記回転数が、所定の第1の回転数より小さい状態が所定の第1の時間以上継続した状態である請求項1に記載の走行制御装置。
- 前記高負荷状態は、前記回転数が、所定の第1の回転数以上になった後、所定の第2の回転数より小さくなる状態である請求項1に記載の走行制御装置。
- 前記回転数は所定の第2の時間ごとに検出され、
前記高負荷状態は、前記回転数が、所定の第1の回転数以上になった後、連続して検出された所定の数の前記回転数の平均値が所定の第2の回転数より小さくなる状態である請求項1に記載の走行制御装置。 - 前記所定の対応処置は、警報の報知である請求項1〜4のいずれか一項に記載の走行制御装置。
- 前記所定の対応処置は、前記原動機の停止である請求項1〜5のいずれか一項に記載の走行制御装置。
- 前記所定の対応処置は、所定の第1の距離だけ後進した後、再び前進を行う走行である請求項1〜5のいずれか一項に記載の走行制御装置。
- 前記作業は、作業領域の走行経路を順に走行しながら行われ、
前記所定の対応処置は、走行中の前記走行経路を、走行済みの前記走行経路の方向に所定の第2の距離ずらす走行である請求項1〜5のいずれか一項に記載の走行制御装置。 - 請求項1から8のいずれか一項に記載の走行制御装置を備える草刈機。
- 原動機の駆動力により走行しながら前記原動機の駆動力により作業を行う作業走行が可能な作業機の走行制御方法であって、
前記原動機からの出力の回転数を検出する工程と、
前記回転数から作業負荷が所定の負荷以上に高い高負荷状態であるか否かを判定する工程と、
前記作業負荷が前記高負荷状態である場合に、所定の対応処置を行う工程とを備える走行制御方法。 - 前記高負荷状態は、前記作業走行が開始されてからの前記回転数が、所定の第1の回転数より小さい状態が所定の第1の時間以上継続した状態である請求項10に記載の走行制御方法。
- 前記高負荷状態は、前記回転数が、所定の第1の回転数以上になった後、所定の第2の回転数より小さくなる状態である請求項10に記載の走行制御方法。
- 前記回転数は所定の第2の時間ごとに検出され、
前記高負荷状態は、前記回転数が、所定の第1の回転数以上になった後、連続して検出された所定の数の前記回転数の平均値が所定の第2の回転数より小さくなる状態である請求項10に記載の走行制御方法。 - 前記所定の対応処置は、警報の報知である請求項10〜13のいずれか一項に記載の走行制御方法。
- 前記所定の対応処置は、前記原動機の停止である請求項10〜14のいずれか一項に記載の走行制御方法。
- 前記所定の対応処置は、所定の第1の距離だけ後進した後、再び前進を行う走行である請求項10〜14のいずれか一項に記載の走行制御方法。
- 前記作業は、作業領域の走行経路を順に走行しながら行われ、
前記所定の対応処置は、走行中の前記走行経路を、走行済みの前記走行経路の方向に所定の第2の距離ずらす走行である請求項10〜14のいずれか一項に記載の走行制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019087529A JP7236924B2 (ja) | 2019-05-07 | 2019-05-07 | 走行制御装置、走行制御方法および草刈機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019087529A JP7236924B2 (ja) | 2019-05-07 | 2019-05-07 | 走行制御装置、走行制御方法および草刈機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020182402A true JP2020182402A (ja) | 2020-11-12 |
| JP7236924B2 JP7236924B2 (ja) | 2023-03-10 |
Family
ID=73044037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019087529A Active JP7236924B2 (ja) | 2019-05-07 | 2019-05-07 | 走行制御装置、走行制御方法および草刈機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7236924B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022253264A1 (zh) * | 2021-06-02 | 2022-12-08 | 苏州宝时得电动工具有限公司 | 智能割草机控制方法、装置、智能割草机和计算机设备 |
| JP2023157741A (ja) * | 2022-04-15 | 2023-10-26 | 井関農機株式会社 | 草刈機 |
| JP2024065871A (ja) * | 2022-10-31 | 2024-05-15 | ヤンマーホールディングス株式会社 | 自走式草刈機 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01291716A (ja) * | 1988-05-18 | 1989-11-24 | Kubota Ltd | 刈取集草装置の負荷制御装置 |
| JPH05252819A (ja) * | 1992-03-16 | 1993-10-05 | Kubota Corp | 草刈機の走行制御装置 |
| JPH10155327A (ja) * | 1996-11-28 | 1998-06-16 | Yanmar Agricult Equip Co Ltd | コンバイン |
| JP2000253729A (ja) * | 1999-03-09 | 2000-09-19 | Iseki & Co Ltd | コンバインの異常警報装置 |
| US20170105339A1 (en) * | 2015-10-14 | 2017-04-20 | Chervon (Hk) Limited | Power tool and control method thereof |
| WO2017154524A1 (ja) * | 2016-03-06 | 2017-09-14 | 日立工機株式会社 | 自走式草刈機及び自走式草刈機における草刈り方法 |
-
2019
- 2019-05-07 JP JP2019087529A patent/JP7236924B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01291716A (ja) * | 1988-05-18 | 1989-11-24 | Kubota Ltd | 刈取集草装置の負荷制御装置 |
| JPH05252819A (ja) * | 1992-03-16 | 1993-10-05 | Kubota Corp | 草刈機の走行制御装置 |
| JPH10155327A (ja) * | 1996-11-28 | 1998-06-16 | Yanmar Agricult Equip Co Ltd | コンバイン |
| JP2000253729A (ja) * | 1999-03-09 | 2000-09-19 | Iseki & Co Ltd | コンバインの異常警報装置 |
| US20170105339A1 (en) * | 2015-10-14 | 2017-04-20 | Chervon (Hk) Limited | Power tool and control method thereof |
| WO2017154524A1 (ja) * | 2016-03-06 | 2017-09-14 | 日立工機株式会社 | 自走式草刈機及び自走式草刈機における草刈り方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022253264A1 (zh) * | 2021-06-02 | 2022-12-08 | 苏州宝时得电动工具有限公司 | 智能割草机控制方法、装置、智能割草机和计算机设备 |
| US20240114827A1 (en) * | 2021-06-02 | 2024-04-11 | Positec Power Tools (Suzhou) Co. Ltd. | Method and apparatus for controlling intelligent lawn mower, intelligent lawn mower, and computer device |
| JP2023157741A (ja) * | 2022-04-15 | 2023-10-26 | 井関農機株式会社 | 草刈機 |
| JP7709683B2 (ja) | 2022-04-15 | 2025-07-17 | 井関農機株式会社 | 草刈機 |
| JP2024065871A (ja) * | 2022-10-31 | 2024-05-15 | ヤンマーホールディングス株式会社 | 自走式草刈機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7236924B2 (ja) | 2023-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7277520B2 (ja) | 作業車 | |
| US12201058B2 (en) | Riding grass mower with rotary blade drive selection unit | |
| US9699961B2 (en) | Mowing vehicle including arrangement for raising/lowering height of a mower unit | |
| US10967903B2 (en) | Electrically powered work vehicle | |
| US10974597B1 (en) | Traveling vehicle | |
| JP7547044B2 (ja) | 作業車両 | |
| JP7236924B2 (ja) | 走行制御装置、走行制御方法および草刈機 | |
| JP2019216670A (ja) | 作業車両 | |
| JP2910244B2 (ja) | 無人走行作業車 | |
| JP7076705B2 (ja) | 草刈機 | |
| JP6979816B2 (ja) | 作業機 | |
| JP7421707B2 (ja) | 作業車両 | |
| JP2023096966A (ja) | 作業車両 | |
| JP2006273286A (ja) | モーアの旋回操作装置 | |
| JP7554402B2 (ja) | 穀稈の刈取作業方法 | |
| JP6869133B2 (ja) | 作業機 | |
| JP2025095182A (ja) | 作業車両 | |
| JP2022044932A (ja) | 作業車両 | |
| JP6976234B2 (ja) | 作業機 | |
| JP4433491B2 (ja) | 草刈機の伝動装置 | |
| JP2023110760A (ja) | 走行機体及びそれを搭載した自走式草刈機並びにそれを用いた草刈方法 | |
| JP2018134054A (ja) | 乗用型草刈機 | |
| JP2024172609A (ja) | 作業車両 | |
| JP2025183860A (ja) | 屋外作業車 | |
| JP2005218311A (ja) | 草刈機の回転刃構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220729 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221220 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20221220 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20221227 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20230104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7236924 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |