JP2021522012A - 管腔内医療撮像インタフェース装置及びシステム - Google Patents
管腔内医療撮像インタフェース装置及びシステム Download PDFInfo
- Publication number
- JP2021522012A JP2021522012A JP2020560934A JP2020560934A JP2021522012A JP 2021522012 A JP2021522012 A JP 2021522012A JP 2020560934 A JP2020560934 A JP 2020560934A JP 2020560934 A JP2020560934 A JP 2020560934A JP 2021522012 A JP2021522012 A JP 2021522012A
- Authority
- JP
- Japan
- Prior art keywords
- head assembly
- assembly
- coupled
- handle
- intraluminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
- A61B8/4218—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames characterised by articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4433—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device involving a docking unit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/445—Details of catheter construction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0116—Steering means as part of the catheter or advancing means; Markers for positioning self-propelled, e.g. autonomous robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/02—Holding devices, e.g. on the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/10—Tube connectors; Tube couplings
- A61M39/1055—Rotating or swivel joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0883—Clinical applications for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0891—Clinical applications for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/158—Needles for infusions; Accessories therefor, e.g. for inserting infusion needles, or for holding them on the body
- A61M2005/1586—Holding accessories for holding infusion needles on the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3546—Range
- A61M2205/3561—Range local, e.g. within room or hospital
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/01—Remote controllers for specific apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/08—Supports for equipment
- A61M2209/082—Mounting brackets, arm supports for equipment
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Pulmonology (AREA)
- Robotics (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Vascular Medicine (AREA)
- Cardiology (AREA)
Abstract
Description
Claims (16)
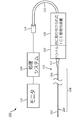
- 管腔内医療撮像インタフェース装置において、前記装置が、
1つ又は複数の長手部材、及び前記1つ又は複数の長手部材に結合された1つ又は複数の接合部を有し、近位部分及び遠位部分を含むアームアセンブリと、
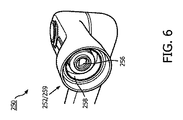
前記アームアセンブリの遠位部分に結合されたヘッドアセンブリであって、
前記アームアセンブリの遠位部分に結合された近位部分、並びに
管腔内撮像カテーテルに分離可能に接続するように構成された機械的結合部、及び
コンソールと前記管腔内撮像カテーテルとの間で電気信号を伝送するように前記管腔内撮像カテーテルに分離可能に接続するように構成された電気結合部、
を含む遠位部分、
を有する前記ヘッドアセンブリと、
を有し、
前記アームアセンブリが、前記ヘッドアセンブリを患者に対する第1の位置及び向きに維持するために、処置室内の表面に結合するように構成され、前記管腔内撮像カテーテルが、オペレータによる継続的な支持なしに適所に保持される、
装置。 - 前記ヘッドアセンブリの前記第1の位置及び向きが、前記アームアセンブリを移動させることによって調整可能である、請求項1に記載の装置。
- 前記ヘッドアセンブリが、回転可能な接合部によって規定される軸の周りで回転するように構成される、請求項1に記載の装置。
- 前記アームアセンブリが、前記患者に対する前記ヘッドアセンブリの向きを維持しながら、前記患者に向かって前記ヘッドアセンブリを第2の位置に前進させるように構成される、請求項1に記載の装置。
- 前記アームアセンブリが、
第1の回転可能な接合部と、
前記第1の回転可能な接合部の遠位の第2の回転可能な接合部と、
前記第1の回転可能な接合部の近位に延在する第1の長手部材と、
前記第1の回転可能な接合部と前記第2の回転可能な接合部との間に延在する第2の長手部材と、
を有し、
前記ヘッドアセンブリが、前記第2の回転可能な接合部の遠位に延在する、
請求項1に記載の装置。 - 前記ヘッドアセンブリの前記近位部分が、前記第2の回転可能な接合部に結合される、請求項5に記載の装置。
- 前記ヘッドアセンブリが、前記アームアセンブリと関節でつながるように構成される、請求項5に記載の装置。
- 前記アームアセンブリが、伸縮アセンブリを有する、請求項5に記載の装置。
- 手術台に固定的に結合するように構成された取付けブレースを更に有する、請求項1に記載の装置。
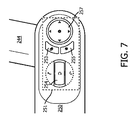
- 前記機械的結合部が、前記管腔内撮像カテーテルのハンドルを受け入れるための凹部を有する、請求項1に記載の装置。
- 管腔内撮像カテーテル及びインタフェース装置を有する管腔内医療撮像システムにおいて、
前記管腔内撮像カテーテルが、
遠位部分及び近位部分を有し、患者の身体内腔内に配置されるように構成される、可撓性細長部材と、
前記可撓性細長部材の近位部分に結合されたハンドルと、
前記遠位部分に結合され、前記可撓性細長部材が身体内腔内に配置されている間に撮像データを取得するように構成された管腔内撮像アセンブリと、
を有し、
前記インタフェース装置が、
1つ又は複数の接合部に結合された1つ又は複数の長手部材を有し、処置室内の表面に結合して、前記ハンドルが前記インタフェース装置に結合される場合に前記管腔内撮像カテーテルの前記ハンドルを前記患者に対する第1の位置及び向きに維持するように構成されるアームアセンブリと
前記アームアセンブリの遠位部分に結合されたヘッドアセンブリであって、前記ヘッドアセンブリが、機械的結合部及び電気的結合部を有し、前記機械的結合部及び電気的結合部が、前記ヘッドアセンブリの遠位部分に配置され、前記管腔内撮像カテーテルの前記ハンドルに分離可能に結合するように構成される、前記ヘッドアセンブリと、
を有する、
システム。 - 前記ヘッドアセンブリが、前記撮像カテーテルへの前記電気的結合部を横切って送信される制御信号を起動するように構成された第1のユーザ制御装置を有する、請求項11に記載のシステム。
- 前記管腔内撮像カテーテルが、心臓内心エコー検査(ICE)撮像カテーテルを有する、請求項11に記載のシステム。
- 前記機械的結合部が、トルクを前記管腔内撮像カテーテルの回転可能部分に伝達するように構成された回転結合部を有する、請求項11に記載のシステム。
- 前記機械的結合部が、前記管腔内撮像カテーテルの前記ハンドルを受け入れるための凹部を有する、請求項11に記載の装置。
- 前記ヘッドアセンブリの前記電気的結合が、前記ハンドルと前記ヘッドアセンブリとの間で電気信号が通過されることができるように、前記管腔内撮像カテーテルの前記ハンドルの電気的結合部に嵌合するように構成される、請求項11に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862665702P | 2018-05-02 | 2018-05-02 | |
| US62/665,702 | 2018-05-02 | ||
| PCT/EP2019/060566 WO2019211150A1 (en) | 2018-05-02 | 2019-04-25 | Intraluminal medical imaging interface devices and systems |
Publications (4)
| Publication Number | Publication Date |
|---|---|
| JP2021522012A true JP2021522012A (ja) | 2021-08-30 |
| JPWO2019211150A5 JPWO2019211150A5 (ja) | 2022-04-18 |
| JP2021522012A5 JP2021522012A5 (ja) | 2022-04-18 |
| JP7643873B2 JP7643873B2 (ja) | 2025-03-11 |
Family
ID=66290445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020560934A Active JP7643873B2 (ja) | 2018-05-02 | 2019-04-25 | 管腔内医療撮像インタフェース装置及びシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12138116B2 (ja) |
| EP (1) | EP3787521A1 (ja) |
| JP (1) | JP7643873B2 (ja) |
| CN (1) | CN112243360A (ja) |
| WO (1) | WO2019211150A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12138116B2 (en) | 2018-05-02 | 2024-11-12 | Koninklijke Philips N.V. | Intraluminal medical imaging interface devices and systems |
| JP2022510654A (ja) | 2018-11-28 | 2022-01-27 | ヒストソニックス,インコーポレーテッド | 組織破砕システムおよび方法 |
| CA3169465A1 (en) | 2020-01-28 | 2021-08-05 | The Regents Of The University Of Michigan | Systems and methods for histotripsy immunosensitization |
| BR112022025722A2 (pt) | 2020-06-18 | 2023-03-07 | Histosonics Inc | Sistemas e métodos de acoplamento acústico e paciente de histotripsia |
| CA3190517A1 (en) | 2020-08-27 | 2022-03-03 | Timothy Lewis HALL | Ultrasound transducer with transmit-receive capability for histotripsy |
| WO2022260746A1 (en) | 2021-06-07 | 2022-12-15 | The Regents Of The University Of Michigan | Minimally invasive histotripsy systems and methods |
| IL308943A (en) | 2021-06-07 | 2024-01-01 | Univ Michigan Regents | All-inclusive ultrasound systems and methods that include histotripsy |
| EP4608504A1 (en) | 2022-10-28 | 2025-09-03 | Histosonics, Inc. | Histotripsy systems and methods |
| KR20260003742A (ko) | 2023-04-20 | 2026-01-07 | 히스토소닉스, 인크. | 치료 계획 및 요법을 위한 사용자 인터페이스들 및 작업 흐름들을 포함하는 히스토트립시 시스템들 및 연관된 방법들 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140148759A1 (en) * | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6078831A (en) * | 1997-09-29 | 2000-06-20 | Scimed Life Systems, Inc. | Intravascular imaging guidewire |
| US8070685B2 (en) | 2005-04-15 | 2011-12-06 | Imacor Inc. | Connectorized probe for transesophageal echocardiography |
| WO2007115307A2 (en) | 2006-04-04 | 2007-10-11 | Volcano Corporation | Ultrasound catheter and hand-held device for manipulating a transducer on the catheter's distal end |
| US8108069B2 (en) * | 2007-01-10 | 2012-01-31 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US20090036900A1 (en) | 2007-02-02 | 2009-02-05 | Hansen Medical, Inc. | Surgery methods using a robotic instrument system |
| EP2628460B1 (en) * | 2007-08-14 | 2021-08-11 | Koninklijke Philips N.V. | Robotic instrument systems utilizing optical fiber sensors |
| US8708952B2 (en) * | 2008-01-16 | 2014-04-29 | Catheter Robotics, Inc. | Remotely controlled catheter insertion system |
| US8323203B2 (en) * | 2008-02-28 | 2012-12-04 | Boston Scientific Scimed, Inc. | Imaging catheter |
| US8083691B2 (en) * | 2008-11-12 | 2011-12-27 | Hansen Medical, Inc. | Apparatus and method for sensing force |
| US10537713B2 (en) * | 2009-05-25 | 2020-01-21 | Stereotaxis, Inc. | Remote manipulator device |
| WO2011008922A2 (en) * | 2009-07-16 | 2011-01-20 | Hansen Medical, Inc. | Endoscopic robotic catheter system |
| US20110015484A1 (en) * | 2009-07-16 | 2011-01-20 | Alvarez Jeffrey B | Endoscopic robotic catheter system |
| US20110257563A1 (en) * | 2009-10-26 | 2011-10-20 | Vytronus, Inc. | Methods and systems for ablating tissue |
| WO2011107899A1 (en) * | 2010-03-03 | 2011-09-09 | Koninklijke Philips Electronics N.V. | Patient interface device having cam wheel adjustment mechanism |
| US9314306B2 (en) | 2010-09-17 | 2016-04-19 | Hansen Medical, Inc. | Systems and methods for manipulating an elongate member |
| WO2014105586A1 (en) * | 2012-12-31 | 2014-07-03 | Volcano Corporation | Stepped banded connector for intravascular ultrasound devices |
| EP2964086A4 (en) | 2013-03-09 | 2017-02-15 | Kona Medical, Inc. | Transducers, systems, and manufacturing techniques for focused ultrasound therapies |
| CA2923460A1 (en) * | 2013-09-06 | 2015-03-12 | Covidien Lp | Microwave ablation catheter, handle, and system |
| JP6656148B2 (ja) * | 2013-10-24 | 2020-03-04 | オーリス ヘルス インコーポレイテッド | ロボット支援管腔内手術のためのシステムおよび関連する方法 |
| EP3096671B1 (en) * | 2014-01-24 | 2023-08-09 | Koninklijke Philips N.V. | Robotic actuator for transesophageal echocardiography probe |
| WO2015164437A1 (en) * | 2014-04-21 | 2015-10-29 | Clph, Llc | Imaging apparatus and systems and methods for using them |
| JP7019679B2 (ja) | 2016-09-29 | 2022-02-15 | コーニンクレッカ フィリップス エヌ ヴェ | 十字状内部輪郭を備える内張り可変ブレード差的デュロメータ硬度複管路シャフト |
| EP3518779B1 (en) | 2016-09-29 | 2021-06-16 | Koninklijke Philips N.V. | Pullwire crown and crown sleeve for catheter assembly |
| JP7030799B2 (ja) | 2016-09-29 | 2022-03-07 | コーニンクレッカ フィリップス エヌ ヴェ | 心臓内心エコー法(ice)用カテーテル先端アセンブリ |
| US11464481B2 (en) | 2016-09-30 | 2022-10-11 | Philips Image Guided Therapy Corporation | Control handle for steerable medical devices |
| US11813116B2 (en) | 2016-10-03 | 2023-11-14 | Koninklijke Philips N.V. | Temperature insensitive backing structure for intraluminal imaging devices |
| WO2018065254A1 (en) | 2016-10-03 | 2018-04-12 | Koninklijke Philips N.V. | Intraluminal imaging devices with a reduced number of signal channels |
| JP7065837B6 (ja) | 2016-10-03 | 2022-06-06 | コーニンクレッカ フィリップス エヌ ヴェ | 心腔内心エコー検査用インターポーザ |
| JP6802917B2 (ja) | 2016-10-03 | 2020-12-23 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 管腔内撮像用の空気切溝を備えたトランスデューサアレイ |
| EP3592241B1 (en) | 2017-03-07 | 2021-04-14 | Koninklijke Philips N.V. | Ultrasound imaging device with thermally conductive plate |
| US12138116B2 (en) | 2018-05-02 | 2024-11-12 | Koninklijke Philips N.V. | Intraluminal medical imaging interface devices and systems |
-
2019
- 2019-04-25 US US17/052,222 patent/US12138116B2/en active Active
- 2019-04-25 JP JP2020560934A patent/JP7643873B2/ja active Active
- 2019-04-25 EP EP19719863.3A patent/EP3787521A1/en not_active Withdrawn
- 2019-04-25 WO PCT/EP2019/060566 patent/WO2019211150A1/en not_active Ceased
- 2019-04-25 CN CN201980037493.7A patent/CN112243360A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140148759A1 (en) * | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019211150A1 (en) | 2019-11-07 |
| JP7643873B2 (ja) | 2025-03-11 |
| US20220008036A1 (en) | 2022-01-13 |
| CN112243360A (zh) | 2021-01-19 |
| US12138116B2 (en) | 2024-11-12 |
| EP3787521A1 (en) | 2021-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7643873B2 (ja) | 管腔内医療撮像インタフェース装置及びシステム | |
| US12419709B2 (en) | Passive and active arm control schemes with sensor integration to support tele-operation and direct manual interaction | |
| US20240050063A1 (en) | Device for intra-cardiac and intra-vascular surgical procedure having an endoluminal ultrasound probe | |
| JP2024001343A (ja) | 医療器具をドッキングするためのシステム及び方法 | |
| US12544167B2 (en) | Systems and methods for adjusting remote center distances in medical procedures | |
| RU2527668C2 (ru) | Улучшенный катетер | |
| JP7292289B2 (ja) | 経食道心エコーのためのワイヤレス動作 | |
| US20070123748A1 (en) | Robot for minimally invasive interventions | |
| AU2017261278A1 (en) | Access devices and methods for treatment of medical conditions and delivery of injectables | |
| JP2009544430A (ja) | 最小侵襲の外科手術を行うためのシステム | |
| CN111698949A (zh) | 用于经食道超声心动图的设备、系统和方法 | |
| JP2011036670A (ja) | カテーテル用のロボット駆動装置 | |
| CN112842533B (zh) | 柔性手术工具及血管介入手术机器人系统 | |
| JP2021517030A (ja) | 腔内感知装置に対する電磁制御並びに関連する装置、システム及び方法 | |
| JP2021522012A5 (ja) | ||
| US11179193B2 (en) | Device for intravascular therapy and/or diagnosis | |
| US11944340B2 (en) | Suction and irrigation valve and method of priming same in a robotic surgical system | |
| US11589948B2 (en) | Hooked surgery camera | |
| EP4452121A1 (en) | Surgical platform with motorized arms | |
| CN222917548U (zh) | 体内可装配超声探头组件及手术机器人系统 | |
| RU2795943C2 (ru) | Беспроводное управление для чреспищеводной эхокардиографии | |
| CN222091714U (zh) | 体内可装配超声探头组件及手术机器人系统 | |
| JP2025013709A (ja) | 画像診断用装置 | |
| Lago et al. | From laparoscopic surgery to 3-D double console robot-assisted surgery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220408 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220408 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221215 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230609 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240131 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240208 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20240405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7643873 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |