JP3100277U - 真空吸着ハンド - Google Patents
真空吸着ハンド Download PDFInfo
- Publication number
- JP3100277U JP3100277U JP2003271021U JP2003271021U JP3100277U JP 3100277 U JP3100277 U JP 3100277U JP 2003271021 U JP2003271021 U JP 2003271021U JP 2003271021 U JP2003271021 U JP 2003271021U JP 3100277 U JP3100277 U JP 3100277U
- Authority
- JP
- Japan
- Prior art keywords
- cargo
- suction pad
- suction
- vacuum suction
- hand
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
【課題】吸着面の位置合わせの作業性と、荷役物の嵌合作業の作業性が優れた、真空吸着ハンドを提供する事を目的としている。
【解決手段】吸着パッドで荷役物を保持する真空吸着ハンドにおいて、テーパ部を有するガイド穴を設け、吸着パッドにはリングを嵌装し、吸着パッドが軸着され、嵌合作業時には該吸着パッドが揺動する。
【選択図】図2
【解決手段】吸着パッドで荷役物を保持する真空吸着ハンドにおいて、テーパ部を有するガイド穴を設け、吸着パッドにはリングを嵌装し、吸着パッドが軸着され、嵌合作業時には該吸着パッドが揺動する。
【選択図】図2
Description
本考案は、荷役物を吸着して移載する真空吸着ハンドに関するものであり、その真空吸着ハンドは荷役物運搬機の先端に取り付けられ、特に自動車関連の組立ラインで用いられる。
吸着パッドのみを備え、荷役物を吸着する真空吸着ハンドがある。荷役物の吸着場所が広く、単に荷役物を吸着するだけの場合は、荷役物の吸着面の位置合わせは、曖昧でも対応でき実用上十分であった。
しかし、荷役物の中心に正確に吸着パッドを位置合わせする必要がある場合には困難であった。また、吸着パッド面が固定されているので容易に吸着パッドは回転せず、荷役物の嵌合作業はやり辛いものとなっていた。
実開平3−69315号公報
解決しようとする問題点は、吸着面の位置合わせの作業性と、荷役物の嵌合作業の作業性である。
テーパ部を有するガイド穴を設け、吸着パッドにはリングを嵌装し、吸着パッドが軸着され、嵌合作業時には吸着パッドが揺動することを特徴とする。
本考案の真空吸着ハンドは、ガイド穴がある為、吸着面の位置合わせの作業性が優れており、また、吸着パッドが揺動する為、荷役物の嵌合作業の作業性が優れているという利点がある。
テーパ形状を有するガイド穴を設け、吸着パッドにはリングを嵌装し、吸着パッドが軸着され、嵌合作業時には該吸着パッドが揺動することで、吸着面の位置合わせの作業性と、荷役物の嵌合作業の作業性が優れていることを実現した。
図1は、真空吸着ハンドが取り付けられた荷役物運搬機の総体図である。天井固定タイプの荷役物運搬機1に、反転機構2を介して真空吸着ハンド3が取り付けられている。真空吸着ハンド3で荷役物4を吸着して移載される。荷役物運搬機1は作業者5が操作するが、自動機でも良い。
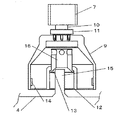
図2は、真空吸着ハンドの斜視図である。反転機構2に、ステー6が取り付けられている。ステー6には、ボックス7が取り付けられている。ボックス7には、ハンドル8が取り付けられている。ボックス7内部には、ベアリング(図示せず)を備えている。吸着パッド9は、軸部10(図3で表示)を有した金具11(図3で表示)で固定されている。金具11には、ガイド穴12を備えている。軸部10がボック7ス内部のベアリングに挿入されているので、吸着パッド9が回転する。反転機構2により、吸着パッド9の面を、下向きに反転する事が可能である。反転する場合は、作業者5がハンドル8を握り操作する。
図3は、真空吸着ハンドの側面図である。2、6〜9、12は、図2と同様である。吸着パッド9は、軸部10を有した金具11で固定されている。
図4及び図5及び図6は、吸着パット9及び、ガイド穴12の断面図である。4、7、9〜12は、図2及び図3と同様である。ガイド穴12を有した金具11に吸着パッド9が取り付けられている。ガイド穴12には、テーパ部13が設けられている。また、吸着パット9の内側には、硬質のリング14が嵌装されている。図4及び図5及び図6を用いて、荷役物4の吸着の作用を説明する。図4の状態は、荷役物4を吸着する前である。図4の状態から吸着パッド9を荷役物4に近づける。作業者5が操作するので、狙い位置の中心からずれてしまう。そのずれた状態が、図5である。図5の状態では、荷役物4の凸部15がテーパ部13と接触した状態である。図5の状態から更に吸着パッド9を荷役物4に近づけると、凸部15がテーパ部13の効果で固定部16にスムースに導かれ、荷役物4の中心に吸着パッド9を吸着させる事ができる。図6が、荷役物4の吸着が完了した図である。吸着時には、固定部16に凸部15が嵌まり込む為、固定部16は荷役物4のずれ防止の効果がある。吸着時は真空力により吸着パット9の外形が内側に入り込もうとするが、硬質のリング14により吸着パット9の外形が内側に入り込まない様にする効果がある。
図7は、真空吸着ハンドの側面図である。2、6〜12は、図3と同様であり、反転機構2により吸着パッド9面を下向きにした状態である。また、図6の状態である。軸部10がボックス7内部のベアリングに挿入されているので、吸着パッド9が回転する。
図8は、真空吸着ハンドの側面図である。2、6〜12は、図3と同様である。図7の状態から、作業者5がハンドル8を握り、反転機構2で荷役物4を反転すると図8の状態となる。固定部16は、荷役物4の前倒れ防止とずれ防止の効果がある。ガイド穴12の荷役物4との接触により、荷役物4の前倒れ防止の効果がある。軸部10がボックス7内部のベアリングに挿入されているので、吸着パッド9が回転する。また、吸着パッド9は、荷役物運搬機1のアームや吸着パッド9のゴムの撓みで、矢印17の様に揺動する。例えば、揺動機構をステー6とボックス7の間や、反転機構2とステー6との間や、反転機構2の上側に取り付けることでも、吸着パッド9は揺動可能である。その揺動で荷役物4が他の部品との嵌合作業が容易になる。位置合わせ機能をパットに内蔵することで、コンパクトとなり、荷役物の視認性が改善され、作業性が向上する。
1 荷役物運搬機
2 反転機構
3 真空吸着ハンド
4 荷役物
5 作業者
6 ステー
7 ボックス
8 ハンドル
9 吸着パッド
10 軸部
11 金具
12 ガイド穴
13 テーパ部
14 リング
15 凸部
16 固定部
2 反転機構
3 真空吸着ハンド
4 荷役物
5 作業者
6 ステー
7 ボックス
8 ハンドル
9 吸着パッド
10 軸部
11 金具
12 ガイド穴
13 テーパ部
14 リング
15 凸部
16 固定部
Claims (1)
- 吸着パッドで荷役物を保持する真空吸着ハンドにおいて、テーパ部を有するガイド穴を設け、吸着パッドにはリングを嵌装し、吸着パッドは軸着され、嵌合作業時には該吸着パッドが揺動することを特徴とする真空吸着ハンド。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003271021U JP3100277U (ja) | 2003-09-05 | 2003-09-05 | 真空吸着ハンド |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003271021U JP3100277U (ja) | 2003-09-05 | 2003-09-05 | 真空吸着ハンド |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3100277U true JP3100277U (ja) | 2004-05-13 |
Family
ID=43253924
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003271021U Expired - Lifetime JP3100277U (ja) | 2003-09-05 | 2003-09-05 | 真空吸着ハンド |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3100277U (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2889774B2 (ja) | 1992-10-27 | 1999-05-10 | 松下電工株式会社 | 建築材吊り上げ装置 |
-
2003
- 2003-09-05 JP JP2003271021U patent/JP3100277U/ja not_active Expired - Lifetime
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2889774B2 (ja) | 1992-10-27 | 1999-05-10 | 松下電工株式会社 | 建築材吊り上げ装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11014228B2 (en) | High-performance four-axis robot with horizontal joint | |
| JP2018110680A5 (ja) | ゲームコントローラ用アタッチメント | |
| JPH0613349Y2 (ja) | 自動開閉ドアの牽引ア−ム | |
| JP3100277U (ja) | 真空吸着ハンド | |
| JP2007160449A (ja) | 操作器 | |
| CN105710517B (zh) | 双变位弧焊夹具工作站 | |
| US20060182601A1 (en) | Industrial robot | |
| EP2409783A3 (en) | Bi-material ultrasonic horn with integral isolation member | |
| JP2009190144A (ja) | ねじ部品締結機 | |
| CN207771405U (zh) | 一种长轴自动上下料机构 | |
| JPS6358074B2 (ja) | ||
| JPS6237620Y2 (ja) | ||
| JP2008036741A (ja) | 連続ねじ締付け機のねじ送り装置 | |
| WO2007008331A3 (en) | Ergonomic hoist and method | |
| JP3108380U (ja) | 車両部品用の荷役物運搬機のアタッチメント | |
| JP2006297576A (ja) | 小型移載機 | |
| JP2017039605A (ja) | ジブ張出格納装置 | |
| JP2002331310A (ja) | バックゲージ装置 | |
| JPS60195169U (ja) | ア−ク溶接ロボツトのト−チ保持装置 | |
| JPS6122829A (ja) | 掃除機の吸塵具 | |
| JP2008157527A (ja) | 空調機 | |
| JP2020157471A (ja) | 磁気ボール盤 | |
| JPS58176609U (ja) | 作業機 | |
| JPS5893426U (ja) | 組立用工具 | |
| JPS59140086U (ja) | ア−ク溶接ロボツトのト−チ自動クリ−ニング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R323532 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term | ||
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091224 Year of fee payment: 6 |