JP3603447B2 - 流量測定装置 - Google Patents
流量測定装置 Download PDFInfo
- Publication number
- JP3603447B2 JP3603447B2 JP02234296A JP2234296A JP3603447B2 JP 3603447 B2 JP3603447 B2 JP 3603447B2 JP 02234296 A JP02234296 A JP 02234296A JP 2234296 A JP2234296 A JP 2234296A JP 3603447 B2 JP3603447 B2 JP 3603447B2
- Authority
- JP
- Japan
- Prior art keywords
- heating element
- change
- substrate
- vibrating body
- temperature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Measuring Volume Flow (AREA)
Description
【発明の属する技術分野】
本発明は、例えば電子制御燃料噴射装置を備えた自動車用エンジンにおいて吸入空気量の計測装置として用いるのに好適な流量測定装置に関する。
【0002】
【従来の技術】
従来、エンジン制御用の吸入空気量の計測装置に用いられるエアフローセンサとして、加熱した抵抗体を空気流にさらし、空気流の冷却効果による抵抗体の温度変化を抵抗変化として測定して空気流量を検出するものが知られている。
【0003】
これら熱式エアフローセンサには、加熱抵抗体として白金細線を用いるホットワイヤ式および白金等の薄膜抵抗を用いるホットフィルム式等があり、シリコン基板をエッチング等の微細加工によって薄膜化し、その上に白金等の薄膜抵抗を配置した半導体ホットフィルム式エアフローセンサも提案されている(特開平7−159215号参照)。
【0004】
【発明が解決しようとする課題】
近時、環境汚染の低減および省燃費を実現するリーンバーンエンジン等において、排気浄化用触媒容量の低減と、燃費と走りとを高次元でバランスさせたエンジン制御とを目指して、制御用センサの高機能化が重要な問題となっている。特に、精密な空燃比制御に要求される吸入空気量の高感度、高精度計測、および逆流検出の実現と、高過給エンジンに要求される空気流量計測のダイナミックレンジの拡大等のニーズが顕在化している。
【0005】
しかしながら、従来の熱式エアフローセンサは、検出部の熱容量を極力小さくした半導体ホットフィルム式のものにおいても、そのダイナミックレンジは十分とは言えないものであった。そのため、発熱体(ホットワイヤ、ホットフィルム)を200℃以上の高温にすることにより辛うじてクリアしているが、その場合、発熱体が高温になるためにその耐久性や信頼性の悪化が問題になっている。
【0006】
また、従来の熱式エアフローセンサでは、空気流の冷却効果による抵抗体の温度変化を抵抗変化として検出しているために、高感度とは言いがたく、抵抗体の大きな温度変化を必要とするという問題もある。
【0007】
さらに、センサ出力が、抵抗変化を電圧で読み取るアナログ信号であるため、エンジン制御用コンピュータへ入力する際に、A/Dコンバータを介在させなければならない。ところが、必要な計測領域を全域満たすような計測精度を得るには大きな分解ビット数を有するA/Dコンバータを必要とすることから、センサの計測レンジおよび精度が、A/Dコンバータの性能により制限を受けるという不都合がある。
【0008】
さらに、自動車のエンジン付近等の電気的な悪環境では、アナログ信号である出力信号が、電磁ノイズやグラウンドノイズ等により常に影響を受けるため、高精度の計測は望めなかった。
【0009】
上述の事情に鑑み、本発明は、極めて高感度でありながら、信頼性、耐久性に富み、かつA/Dコンバータを必要としない流量測定装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
本発明による流量測定装置は、基板上に発熱体と両持ち梁を近接させて配設し、発熱体の熱によって両持ち梁に発生している熱応力が、流体の質量流量に応じた冷却効果による発熱体の温度変化によって変化するのを両持ち梁の機械的変化として検出するように構成されていることを特徴とするものである。
【0011】
この場合、上記両持ち梁がシリコン単結晶基板から一体に削出され、両端を支持端として上記シリコン単結晶基板に支持された構成とする。
【0012】
また、上記両持ち梁が、両持ち梁構造を有する振動体よりなり、上記両持ち梁の、それに加わる熱応力変化に起因する機械的変化を測定する手段が、上記振動体の共振周波数の変化を測定する手段よりなることが好ましい。
【0013】
上記振動体の厚さhおよび長さLと、該振動体に予め内在する長手方向の応力による歪みε0 と、上記発熱体の熱によって生じる圧縮歪みεheatとは、次式で表される関係にあることが好ましい。
【0014】
ε0 +εheat>(−π2 /3)h2 /L2
さらに、本発明による流量測定装置は、流体の冷却効果による発熱体の温度低下を補う手段を備え、該手段により、発熱体の温度がほぼ一定に保たれるように構成することもできる。
【0015】
その場合、発熱体近傍の基板温度の2次元分布が流体流量によって変化する基板上の位置に上記振動体が配置され、基板温度の2次元分布の変化に起因する振動体の共振周波数の変化の測定に基づいて流体の流量測定がなされる。
【0016】
また、上記基板上に振動体の複数が上記流体の流れの方向に沿って配設され、これら複数の振動体間の共振周波数変化の差異に基づいて流体の流量および流れの方向の測定がなされるように構成することができる。
【0017】
【発明の効果】
理論的に発熱体から奪われる熱量Qと質量流量Gとの関係は次式のようになる。
【0018】
Q=K√G ( Kは定数)
したがって、両持ち梁に作用する温度変化ΔTも次式のようになる。
【0019】
ΔT=K√G
両持ち梁に作用する熱応力は両持ち梁付近とそれ以外の基板部分の温度差によって発生する。その発生機構の概略を図1および図2に示す。図1は動かない壁に両端を固定された剛体棒を加熱すると、熱膨脹により棒が伸びようとするために、棒に圧縮応力が発生した状態を示す。また、図2は両持ち梁構造を有する振動体における加熱による応力発生状態を示し、図2(a)は振動子を直接的に加熱するタイプであり、図2(b)は振動子を間接的に加熱するタイプである。
【0020】
上記両持ち梁が、その両端の支持部を含めてシリコン単結晶基板からエッチング等により一体に削出された場合は、その内部応力はほとんどゼロとなり、この両持ち梁を振動体として用いた場合、センサ特性を容易に制御することができる。またシリコン単結晶は、半導体集積回路の基板材料として、極めて純度の高いものが容易に得られるから、機械的特性の揃ったかつ安定なものが得られ、振動体の共振特性の安定化に寄与することができる。
【0021】
振動体を構成する材料の熱膨脹係数をαとして、振動体と基板部分との温度差をTとすると、発生する応力σは次式のようになる。
【0022】
σ=εE=αTE (E:ヤング率,ε:発生歪み)
したがって、冷却効果による温度変化ΔTと熱応力変化σとの関係は次式のようになる。
【0023】
εheat=Kα√G
一方、発生歪みに対する振動体の共振周波数変化は次式で理論的に表される。
【0024】
【数1】
ここで、
αn ,γn :振動の態様(モード)で決まる定数
L,h:振動体の長さ、厚さ
Ee :実効ヤング率=E/(1−ν2 )、νはポアソン比
I:振動体の断面2次モーメント
ρ:振動体材料の密度
A:振動体の断面積
また振動体に加わる歪みεは、振動体に予め残留している歪みε0 と熱応力 εheatの和で表される。
【0026】
ε=ε0 +εheat=ε0 +Kα√G
したがって、質量流量Gによる熱応力の変化分を考慮した振動体の共振周波数f0 は次式で表される。
【0027】
【数2】
このように、計測する質量流量Gと振動体の共振周波数f0 との関係は1/4乗特性となる。この特性は、微小流量域では高感度(出力の傾きが大きい)で、大流量になるに伴って出力の傾きが低下して行くようなダイナミックレンジの広い理想に近い出力特性が得られることになる。
【0029】
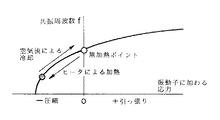
振動体に加わる応力に対する共振周波数の特性は、図3に示すような1/2乗特性となる。図3において、振動体の初期状態として、残留応力がゼロの点を発熱体(ヒータ)の無加熱ポイントとする。振動体をセンサとして作動させるため、予め発熱体により振動体を加熱しておくと、周囲の冷たい基板との温度差により振動体にはこれを圧縮するように応力が加わり、共振周波数f0 が低下する。
【0030】
すなわち、所定の温度に加熱した振動体の共振周波数が、流量ゼロのときのセンサ出力となる。そして、これに空気流による冷却効果が加わると、振動体の温度が低下するため、圧縮応力が減少し、空気流量に応じて共振周波数が上昇する。
【0031】
図3から明らかなように、圧縮応力が増大すると、振動体の共振周波数がゼロになる点がある。この点を構造力学的に座屈点と言い、このときの応力を座屈応力と言う。フローセンサとして計測のダイナミックレンジの拡大と感度の向上のためには、座屈点により近い領域における応力対周波数特性を用いるのがよいが、加熱による圧縮応力が座屈点を越えると、振動体として機能しない。
【0032】
したがって、振動体をフローセンサとして機能させるための発熱体による加熱は、座屈点を越えない範囲で、かつ所望の感度およびダイナミックレンジが得られるように、なるべく圧縮応力の大きい側に設定する必要がある。
【0033】
振動体の座屈点はその振動体の寸法で決定されることが知られており(オイラーの座屈点)、これを座屈歪みεb で表すと、次式のようになる(h:振動体の厚さ、L:振動体の長さ)。
【0034】
εb =(−π2 /3)h2 /L2
したがって、振動体の厚さhおよび長さLと、振動体に予め残留する歪みε0 と、発熱体の熱によって生じる圧縮歪みεheatとが以下のような関係を満足するような設定となる。
【0035】
ε0 +εheat>(−π2 /3)h2 /L2
また、εheatを発熱体の加熱温度Tとの関係に直すと
εb +αT>(−π2 /3)h2 /L2
すなわち、本発明では、発熱体の加熱温度T、振動体の残留応力ε0 および振動体の寸法(h,L)が上式を満足させる関係にあることも特徴となっている。
【0036】
また、フローセンサとして振動体を用いた場合、出力が周波数出力となり、A/Dコンバータが不要となるから、センサの計測レンジおよび精度がA/Dコンバータの性能により制限を受けるという従来技術の問題点が解決される。そしてこの場合、センサ出力をエンジン制御用コンピュータのタイマカウンタポートに直接入力することができ、コンピュータの時間計測が高精度なこと相俟って、空気流量の高精度、高分解能計測が可能になる。また、センサ出力が周波数変調信号であるため、電磁ノイズやグラウンドノイズ等に影響されず、誤差の少ない信号伝送が実現できる。
【0037】
発熱体の近傍に配設された両持ち梁に加わる熱応力変化の計測は、必ずしも上記両持ち梁が振動体でなくても可能ではあるが、振動体は応力に対する検出感度が極めて高く、微妙な温度変化に対しても十分検出できるほどの周波数変化をもたらす。したがって、従来技術のように発熱体の温度を高温にしておく必要がなく、信頼性および耐久性が著しく向上する。
【0038】
また、振動体は、上述のように温度変化に敏感であるため、発熱体自身の空気流による直接の冷却効果だけでなく、振動体付近の熱分布の変化にも敏感に反応する。
【0039】
ところで、発熱体を有するセンサ構造体上における発熱体の周囲の2次元温度分布を温度等高線で表すと、図4(a)に示すように、発熱体を中心に左右対称になるが、発熱体の表面上を空気流が流れると、空気流の流量とともに流れの方向によって2次元温度分布が変化する。そこで、空気流による発熱体の温度低下をフィードバック制御によって補って、発熱体の温度を常に一定に保った状態にしておくと、図4(b)に示すように、発熱体の上流と下流とで熱分布に差異を生じる。
【0040】
したがって、このような熱分布が変化する部分に、温度変化を検出する振動体を配置することにより、発熱体と振動体とを配設したセンサ基板上における2次元的な熱分布の空気流による変化も検出できるエアフローセンサが実現できる。特に熱分布の変化は、質量流量のみでなく、流れの方向成分の情報を含んでいるから、流れの方向により温度に差異の発生する複数位置にそれぞれ振動体を配設することにより、流れの方向も検出可能なエアフローセンサが実現できる。図4(b)においては、発熱体に対し、空気流の上流側と下流側とに振動体を対称的に配設し、各振動体の出力周波数信号の差分を算出することにより、逆流も検出可能なエアフローセンサが実現され、自動車エンジンの高精度空燃比制御に貢献することができる。
【0041】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を参照して説明する。
【0042】
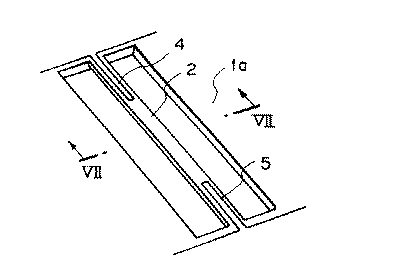
図5は本発明による流量測定装置の第1の実施の形態を示す振動式エアフローセンサの斜視図、図6はその要部の拡大斜視図、図7は図6の VII−VII 線に沿った拡大断面図、図8は振動体の拡大断面図である。
【0043】
図5において、20はシリコン単結晶基板1からなるセンサ構造体で、基板1の上面1aは、例えば図7に示すように、シリコン単結晶のミラー指数で表される(100)面となっている。2はこのシリコン単結晶基板1からエッチング加工により一体に削出された両持ち梁構造を有する三角柱からなる振動体である。
【0044】
この振動体2の断面形状は、基板面1aである(100)面が二等辺三角形の底面になり、二等辺の部分はともに(111)面になっている。上記底面と二等辺とのなす角度は、結晶面から見て(100)面と(111)面との交わる角度である54.7度となっており、振動体2の長手方向は、基板面1a内での<110>方向に平行であり、振動体2はその両端を固定端としてシリコン単結晶基板1に支持され、両持ち梁構造を構成している。一例として、振動体2の寸法を以下に記す(図8参照)。
【0045】
振動体長さL: 1.6mm
振動体高さh: 20μm
振動体幅b : 28.3μm
基板面1a上には、白金の薄膜により形成された発熱体3,3が振動体2の各固定端近傍にそれぞれ配設されており、さらに、図6に示すように、振動体2の一方の固定端から振動体2の面上に延びる駆動用抵抗4と、振動体2の他方の固定端から振動体2の面上に延びる振動検出用抵抗(ピエゾ抵抗)5とが拡散抵抗により形成されている。
【0046】
シリコン単結晶基板1は、裏面からエッチング加工等によって深く掘られ、発熱体3,3や振動体2が配設されている部分はダイアフラム構造を有している。これは、少ない電力で発熱体の温度を上昇させるためと、センサの感度と応答性を向上させるために、熱容量を下げる必要があるからである。
【0047】
図9は、振動体2に振動を励起させ、かつその振動を検出する回路の一例を示す概略図である。図6に示すように、振動体2上には駆動用抵抗4が拡散により形成されており、この駆動用抵抗4に交番電流を供給して交番的に発熱させることによって、振動体2に交番応力をかけ振動を励起させる。振動体2上には検出用ピエゾ抵抗5が拡散により形成されているので、このピエゾ抵抗5が振動体2が振動により曲がることにより発生する応力を検出用抵抗5の抵抗変化ととして読み出せばよい。
【0048】
振動体2の自励発振は、振動の検出信号を駆動用抵抗4に正帰還させることにより発生させる。図9においては、検出用抵抗5を含むブリッジ回路6で検出した検出出力をプリアンプ7で増幅して得られた周波数出力を駆動用抵抗4に帰還させる正帰還ループに、増幅率を制御して駆動用抵抗4に供給される電力を一定にコントロールするAGCアンプ8を介在させて、正帰還による無限大発振を防止している。
【0049】
図10は、空気流の流量が0〜150g/sec の範囲において発熱体3,3の温度が約50℃変化すると仮定した場合の空気流の質量流量と振動体2の共振周波数特性を示すグラフである。図10から明らかなように、0〜150g/sec の流量範囲で共振周波数の変化範囲は23.3kHz 〜39.9kHz となる。この場合、エンジン制御用コンピュータ内のカウンタ/タイマ機能を用いて、1MHz の基準クロックと1msecの時間で周波数計測を行なう場合において、1.0g/sec の微小流領域から150g/sec まで±3%の精度分解能をもって計測することができる。このように、本実施の形態によれば、150倍のダイナミックレンジの領域を精度良く計測することが可能な高感度流量測定装置を得ることができる。
【0050】
図11は、図5〜図8に示す振動体2の製造方法の一例を説明する工程図である。
【0051】
工程1:先ず基板面が(100)面であるシリコンウエハ(シリコン単結晶基板)10を用意する。
【0052】
工程2:エッチングマスクにするためのシリコン酸化膜11をシリコンウエハ10の表面に付ける。ここでは、通常の半導体集積回路の製造工程で用いられる熱酸化による方法あるいはCVDによる膜形成法等を適用すればよい。なお、このエッチングマスクは、酸化膜に限定されるものでなく、窒化膜その他、強アルカリ溶液による後工程でのエッチングに対し十分な耐性を有する膜材料であればよい。
【0053】
工程3:振動体2の形状を決定するため、酸化膜11のパターニングを行なって、作成すべき振動体2の幅に等しい間隔を隔てて<110>方向に延びる互いに平行でかつ作成すべき振動体2の長さに等しい長さを有する一対の開口12,12を備えた酸化膜マスク13をシリコンウエハ10の表面に形成する。このパターニングは、フォトレジスト等を用いたフォトリソグラフィ工程の後、エッチング液としてフッ酸水溶液等を用いて行なう。
【0054】
工程4:酸化膜マスク13をエッチングマスクとして、シリコン基板に対して開口12,12を通じてエッチングを行なって、基板面に対してほぼ垂直な壁面を備えた互いに平行な一対の凹溝14,14を形成する。この場合のエッチングは、フッ素系のガスを用いたRIE(リアクティブ イオンエッチング)法を用いて行なう。
【0055】
工程5:同じ酸化膜マスク13をエッチングマスクとして、凹溝14,14に対してKOHやTMAH(テトラメチルアンモニウムハイドロオキサイド)等の強アルカリ溶液によってエッチングを行なう。
【0056】
このように、シリコン単結晶材料を上記のような特定の強アルカリ溶液によってエッチングを行なうと、シリコン単結晶の特定の結晶面によってエッチング速度が著しく異なる性質がある。例えばシリコン単結晶の(100)面や(110)面に対して(111)面のエッチングされる速度は非常に遅く、速度比で約100:1程度になる。このような性質から、この工程でのエッチングは、エッチング速度の速い(110)面を進行面としてその両端部に(111)面が残る状態で結晶異方性エッチングが進行して行く。
【0057】
工程6:最終的には振動体2となる部分の両側から(110)面を進行面として横方向にエッチングが進行して行き、両凹溝14,14間がそれらの底部において互いに連通し、振動体2となる部分の下方に空間15が形成されることによって、残った2つの(111)面と1つの(100)面とによって囲まれた三角柱からなる梁を得る。最終的に梁の上面を覆う酸化膜マスク13をエッチング等で除去すればよい。
【0058】
このような結晶異方性エッチングを実施すれば、エッチング後の形状がエッチング条件(温度や撹拌等)によらず高い精度で予測でき、加工が容易となる。
【0059】
このような製造工程によって得られた、1つの(100)面と、極めてエッチング速度が遅い2つの(111)面とで構成された三角柱からなる振動体2は、結晶面上の幾何学的特性から、その形状がほぼ決定される。すなわち、振動体2の幅bが酸化膜マスク13上のパターニングで決定されれば、三角柱断面における高さhは一義的に決まってしまう。
【0060】
h=tan(54.7°)・b/2
このことは、振動体2の幅bの加工精度を高めておけば、高さhの寸法精度が自動的に向上することを意味する。
【0061】
一般に、エッチングによって深さ方向の加工を行なう場合、その加工精度はエッチングの終点を判断するのが困難なためその寸法精度は悪い。たとえばRIE等でシリコンのエッチングを行なう場合でも、深さ寸法の加工の絶対値で±5%程度のばらつきが生じたり、加工の均一性においてもウエハ面内で±5%いないの精度を得るのに極めて複雑なエッチング装置を用いなければならない。一方、フォトリソグラフィによるパターニングで代表される面上での加工精度は、半導体集積回路の製造工程の進歩に見られるように極めて高精度な加工(絶対、相対加工精度で±1%以下)が比較的容易に得られる。
【0062】
したがって、上述した製造方法によれば、その製造工程と得られる構造体の構造的特徴とから、深さ方向の加工精度(ここでは三角断面の高さh)についても面内のパターニング精度と同程度の精度が容易に実現できる。
【0063】
上記工程4においては、RIEによるエッチング加工を施しているが、この工程でのエッチング加工は、振動体2の下部の中空になる部分が貫通できるだけの深さがあればよく、次式に示すようにその下限より深くエッチングすれば事足りることになる(エッチング壁面が基板面に対して90°をなす場合)。
【0064】
エッチング深さd>btan(54.7°)
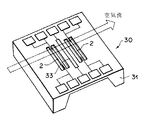
次に、図12は本発明による流量測定装置の第2の実施の形態を示す振動式エアフローセンサの斜視図である。
【0065】
本実施の形態のエアフローセンサの特徴は、空気流の流量のみでなく流れの方向をも検出可能な点にある。
【0066】
図12に示すセンサ構造体30は、図5と同様のシリコン単結晶基板31上に特性の一致した2つの振動体2,2を、計測する空気流に対して中央の発熱体33を挾んで上流側と下流側に配置してある。センサ構造体30は、図5に示す第1の実施の形態と同様のダイアフラム構造を有し、また振動体2,2の構造およびそれらの自励振動の機構と動作も第1の実施の形態と同様である。
【0067】
空気流量の測定には、いずれか一方の振動体2の共振周波数を測定することにより達成できる。また、発熱体33の下流側よりも上流側の方が温度低下が大きいことから、空気流の方向の検出は、2つの振動体2,2の共振周波数の差を求め、その正負を判定することにより達成できる。すなわち、振動体2,2の共振周波数のうち、上流側をfup、下流側をfdownとすると、
fup−fdown<0で順流、fup−fdown>0で逆流となる。
【0068】
発熱体33の駆動には、空気流の冷却効果による温度低下を補うべく、温度検出用抵抗と、外部回路とを用いて、発熱体33の温度を一定に保つようにしている。すなわち、発熱体33は、図13に示すように、発熱用抵抗RH と発熱温度をモニタする温度検出用抵抗RHTからなり、さらに基準温度(ここでは空気温)を測定するための抵抗RT を図14に示す外部回路に設けてあり、抵抗RHT,RT と定抵抗R1 ,R2 とによってブリッジ回路を構成している。そして冷却により発熱体33の温度が低下するとブリッジ回路のバランスが崩れ、ブリッジ出力に電位差が発生する。この電位差を演算増幅器34を通じて増幅して、その出力により、発熱用抵抗RHTに対する供給電流を増加させて、発熱体33を加熱するように構成されている。このようなフィードバック回路を用いることにより、発熱体33の温度が基準温度(空気温)に対して所定の温度差を有する温度の制御される。
【0069】
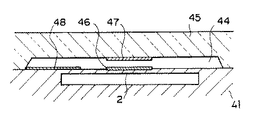
図15は本発明による流量測定装置の第3の実施の形態を示す振動式エアフローセンサの斜視図、図16はその要部の拡大断面図である。
【0070】
本実施の形態におけるエアフローセンサのセンサ構造体40は、シリコン単結晶基板41上に2つの振動体2,2を、計測する空気流に対して中央の発熱体33を挾んで上流側と下流側に配置してある点、および空気流の流量のみでなく流れの方向をも検出可能な点で、図12に示す第2の実施の形態と同様であるが、本実施の形態においては、センサ構造体40の発熱体33および振動体2,2が配設されているダイヤフラム構造部が、図16に示すように、このダイヤフラム構造部との間に所定の間隙44を形成したガラスキャップ45で封止された構成を有する。この封止された間隙44は10〜3Torr程度の真空に保たれていることにより、振動体2,2の空気粘性による振動の減衰効果が減少し、極めて安定で高純度の共振振動が得られる。上記ガラスキャップ45は、陽極接合法等により、基板41の上面に気密に接合されている。
【0071】
このように、上面を封止された構造の場合、空気流はダイヤフラム構造部の裏面に沿って流れるように構成される。そのため、基板41の側面がエッチング加工等により削られた形状になっており、また、ダイヤフラム構造部は、発熱体33の熱が裏面に十分に作用するような厚さに設定されている。
【0072】
また、本実施の形態においては、振動体2に振動を励起させるために、駆動用抵抗に代えて、基板41の上面とガラスキャップ45の下面との間に形成された間隙44を利用した駆動用静電電極を用いている。すなわち、図16に示すように、振動体2の上面に下部電極46が設けられ、この下部電極46に対向する上部電極47がガラスキャップ45の下面に設けられている。そして、両電極46,47間に交番電圧を印加することにより、静電気力によって振動体2が振動せしめられる。振動体2の振動は、前述の実施の形態と同様に、振動体2の一方の固定端付近に設けられたピエゾ抵抗48によってその抵抗変化として検出される。
【0073】
図17は、振動体2に振動を励起させ、かつその振動を検出する回路の一例を示す概略図である。
【0074】
振動体2の自励発振は、駆動用電極46,47に正帰還させることにより発生させる。図9と同様に、検出用ピエゾ抵抗48を含むブリッジ回路49で検出した検出出力をプリアンプ50で増幅して得られた周波数出力を駆動用電極46,47に帰還させる正帰還ループに、増幅率を制御して駆動用電極46,47に供給される電力を一定にコントロールするAGCアンプ51を介在させて、正帰還による無限大発振を防止している。
【0075】
以上の実施の形態においては、空気流の冷却効果による発熱体3,33の温度変化に基づく両持ち梁の熱応力変化をすべて両持ち梁構造を有する振動体2の共振周波数の変化として検出しているが、これは前述したように、振動体2が極めて検出感度が良いからである。しかしながら、本発明は、両持ち梁の熱応力変化を直接ピエゾ抵抗等を用いて検出する形式の流量測定装置をも含むことは言うまでもない。
【図面の簡単な説明】
【図1】両端を固定した剛体棒を加熱することにより剛体棒に応力が発生する機構を説明する図
【図2】両持ち梁構造を有する振動体を加熱することにより振動体に応力が発生する機構を説明する図
【図3】両持ち梁構造を有する振動体に加わる応力に対する共振周波数の変化を示す特性図
【図4】センサ構造体上における発熱体近傍の2次元温度分布を示す図
【図5】本発明による流量測定装置の第1の実施の形態を示す振動式エアフローセンサの斜視図
【図6】図5の要部拡大斜視図
【図7】図6の VII−VII 線に沿った拡大断面図
【図8】振動体の拡大断面図
【図9】振動検出回路の一例を示す概略図
【図10】空気流の質量流量に対すると振動体の共振周波数特性を示すグラフ
【図11】振動体の製造方法を説明する工程図
【図12】本発明による流量測定装置の第2の実施の形態を示す振動式エアフローセンサの斜視図
【図13】同 要部の概略的平面図
【図14】同 発熱体の温度を一定に保つ装置の回路図
【図15】本発明による流量測定装置の第3の実施の形態を示す振動式エアフローセンサの斜視図
【図16】同 要部の拡大断面図
【図17】同 振動検出回路の概略図
【符号の説明】
1,31,41 シリコン単結晶基板
2 振動体
3,33 発熱体
4 駆動用抵抗
5,48 振動検出用抵抗
8,51 AGCアンプ
20,30,40 センサ構造体
44 間隙
45 ガラスキャップ
46,47 電極
Claims (6)
- 基板上に配設された発熱体と、
該発熱体の近傍に配設された両持ち梁と、
上記基板の面に沿って流れる流体の冷却効果による上記発熱体あるいはその近傍の基板の温度変化に基づく上記両持ち梁の、それに加わる熱応力変化に起因する機械的変化を測定する手段とを備え、
該手段による上記両持ち梁の機械的変化の測定に基づいて上記流体の流量の測定がなされ、
上記両持ち梁がシリコン単結晶基板から一体に削出され、両端を支持端として上記シリコン単結晶基板に支持されてなることを特徴とする流量測定装置。 - 上記両持ち梁が両持ち梁構造を有する振動体よりなり、上記両持ち梁の、それに加わる熱応力変化に起因する機械的変化を測定する手段が、上記振動体の共振周波数の変化を測定する手段よりなることを特徴とする請求項1記載の流量測定装置。
- 上記振動体の厚さhおよび長さLと、該振動体に予め内在する長手方向の応力による歪みε0と、上記発熱体の熱によって生じる圧縮歪みεheatとが、次式で表される関係にあることを特徴とする請求項2記載の流量測定装置。
ε0+εheat>(−π2/3)h2/L2 - 上記流体の冷却効果による上記発熱体の温度低下を補う手段を備え、該手段により、上記発熱体の温度がほぼ一定に保たれることを特徴とする請求項2記載の流量測定装置。
- 上記発熱体近傍の基板温度の2次元分布が流体流量によって変化する基板上の位置に上記振動体が配置され、上記基板温度の2次元分布の変化に起因する上記振動体の共振周波数の変化の測定に基づいて上記流体の流量の測定がなされることを特徴とする請求項4記載の流量測定装置。
- 上記基板上に上記振動体の複数が上記流体の流れの方向に沿って配設され、該複数の振動体間の共振周波数変化の差異に基づいて上記流体の流量および流れの方向の測定がなされることを特徴とする請求項5記載の流量測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02234296A JP3603447B2 (ja) | 1996-02-08 | 1996-02-08 | 流量測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02234296A JP3603447B2 (ja) | 1996-02-08 | 1996-02-08 | 流量測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09218064A JPH09218064A (ja) | 1997-08-19 |
| JP3603447B2 true JP3603447B2 (ja) | 2004-12-22 |
Family
ID=12080019
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02234296A Expired - Fee Related JP3603447B2 (ja) | 1996-02-08 | 1996-02-08 | 流量測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3603447B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6884458B2 (en) * | 2002-12-04 | 2005-04-26 | The Board Of Trustees Of The University Of Illinois | Sensor for monitoring material deposition and method of monitoring material deposition |
| RU177514U1 (ru) * | 2017-12-20 | 2018-02-28 | Федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский университет "Московский институт электронной техники" | Термоанемометрический датчик расхода жидкостей и газов |
| CN111474381B (zh) * | 2020-04-27 | 2021-06-01 | 吉林大学 | 含有仿生十字梁传感器的空气流速传感装置及其制备方法 |
| CN119290090B (zh) * | 2024-11-13 | 2025-10-10 | 清华大学 | 一种基于saw振荡器的流体流量检测的无线传感系统 |
-
1996
- 1996-02-08 JP JP02234296A patent/JP3603447B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH09218064A (ja) | 1997-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4388614B2 (ja) | 媒質の粘度と密度を測定するためのセンサ | |
| US9038443B1 (en) | Microfabricated resonant fluid density and viscosity sensor | |
| EP1533611B1 (en) | Apparatus and method for measuring micro mass using oscillation circuit | |
| GB2249174A (en) | Rate of rotation sensor | |
| Duwel et al. | Quality factors of MEMS gyros and the role of thermoelastic damping | |
| Prak et al. | Selective mode excitation and detection of micromachined resonators | |
| JP2002501620A (ja) | 共振器構造を有するマイクロセンサ | |
| US20230057869A1 (en) | Resonant frequency-based magnetic sensor at veering zone and method | |
| JP3484372B2 (ja) | 感熱式流量センサ | |
| JP3603447B2 (ja) | 流量測定装置 | |
| Burrer et al. | A novel resonant silicon accelerometer in bulk-micromachining technology | |
| JP3577269B2 (ja) | 熱式空気流量センサおよびその形成方法 | |
| CN100570755C (zh) | 一种低温度交叉灵敏度的微悬臂梁谐振器 | |
| Von Papen et al. | A micro surface fence probe for the application in flow reversal areas | |
| JP2002048616A (ja) | 熱式空気流量センサ及び内燃機関制御装置 | |
| JPH08107219A (ja) | 半導体加速度センサ及び半導体加速度センサの製造方法 | |
| US7959873B1 (en) | Biological detection based on differentially coupled nanomechanical systems using self-sensing cantilevers with attonewton force resolution | |
| Chen et al. | Design and modeling of a silicon nitride beam resonant pressure sensor for temperature compensation | |
| Chen et al. | Thermally excited SiN beam resonant pressure sensor | |
| JP3274288B2 (ja) | 半導体マイクロセンサとその製造方法 | |
| Jianqiang et al. | A novel temperature-compensating structure for micromechanical bridge resonator | |
| JP2009097951A (ja) | 温度センサ | |
| JP2859831B2 (ja) | フローセンサ、その製造方法および駆動方法 | |
| Von Papen et al. | A MEMS surface fence sensor for wall shear stress measurement in turbulent flow areas | |
| US11480480B2 (en) | Thermal flux sensor with heating nanofilaments |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040622 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040920 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |