JP3630171B2 - 能動振動制御装置 - Google Patents
能動振動制御装置 Download PDFInfo
- Publication number
- JP3630171B2 JP3630171B2 JP03534194A JP3534194A JP3630171B2 JP 3630171 B2 JP3630171 B2 JP 3630171B2 JP 03534194 A JP03534194 A JP 03534194A JP 3534194 A JP3534194 A JP 3534194A JP 3630171 B2 JP3630171 B2 JP 3630171B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- signal
- canceling
- generated
- cancellation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Soundproofing, Sound Blocking, And Sound Damping (AREA)
Description
【0001】
【産業上の利用分野】
本発明は、能動振動制御装置に関し、特に車輌の走行等により発生する振動及びこれらの振動に起因して生ずる騒音を能動的に制御して低減させる能動振動制御装置に関する。
【0002】
【従来の技術】
本発明における「振動」の語は、「騒音」をも含めた意味で使用する。
【0003】
振動制御装置のうち、振動源(一次振動源)から発生する振動を能動的に制御して振動および騒音の低減化を図る能動振動制御装置と呼称されるものがある。
【0004】
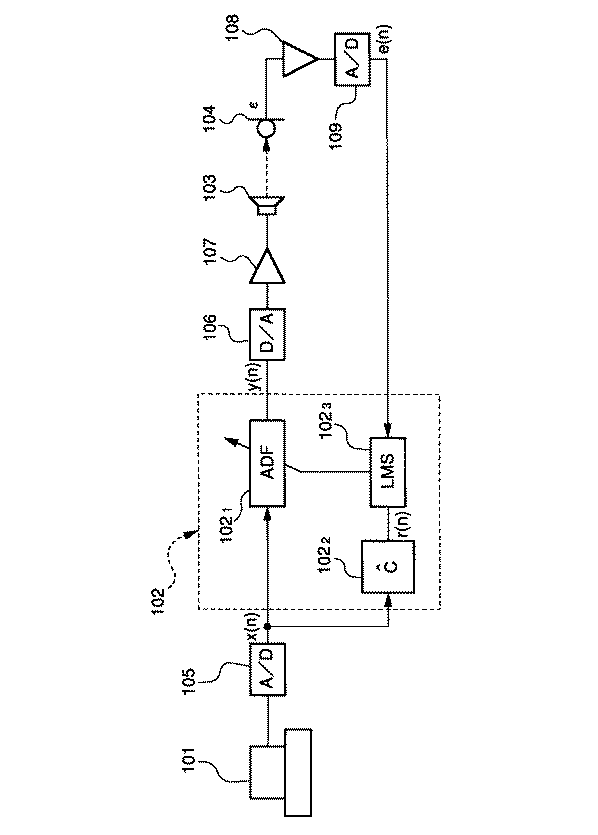
従来、この種の能動振動制御装置としては、図4に示すように、一次振動源からの振動を検出する振動センサ101と、該振動センサ101により検出された振動が参照信号として入力され、その参照信号に基づいて制御空間における制御対象振動と逆位相の相殺信号を生成する適応制御回路102と、適応制御回路102により生成された相殺信号に基づいて相殺振動を発するスピーカ(二次振動源)103と、スピーカ103により発せられた相殺振動と前記参照信号との相殺誤差を検出するマイクロホン104とを主要部として構成されたものが知られている(例えば、特表平1−501344号公報)。
【0005】
上記従来の能動振動制御装置においては、振動センサ101により検出された一次振動はA/Dコンバータ105によってサンプリングされ、デジタルデータの基準信号(参照信号)x(n)として適応制御回路102に入力される。該適応制御回路102からは上述のように生成された相殺信号が出力されてD/Aコンバータ106でアナログ信号に変換され、アンプ107により増幅されてスピーカ103から相殺振動(二次振動)が発せられる。
【0006】
一方、マイクロホン104はスピーカ103からの相殺振動と振動源からの振動との相殺誤差を受信し、該相殺誤差εはアンプ108により増幅され、A/Dコンバータ109によりサンプリングされ、デジタルデータの誤差信号e(n)として取り出され、適応制御回路102にフィードバックされる。すなわち、誤差信号は、一次振動と二次振動との相殺誤差を示すものであり、上記能動振動制御装置においては前記誤差信号が最小値となるように相殺信号の伝達特性を変更することにより振動の低減が図られている。
【0007】
更に、適応制御回路102は、FIR型適応デジタルフィルタ(以下、「ADF」という)1021と、スピーカ103からマイクロホン104までの、この制御系特有の伝達特性が同定されて設定されたフィルタC^1022と、参照信号x(n)がフィルタC^1022によりフィルタリングされた参照信号r(n)および前記誤差信号e(n)に基づいて、例えば、LMSアルゴリズム(LMS:Least Mean Square)によりADF1021のフィルタ係数を更新するLMS処理部1023とにより構成される。参照信号x(n)がフィルタC^1022によりフィルタリングされた参照信号r(n)および前記誤差信号e(n)に基づいて、LMS処理部1023は誤差信号e(n)が最小値となるようにADF1021のフィルタ係数を更新する。
【0008】
【発明が解決しようとする課題】
しかしながら、上記従来の能動振動制御装置では、一次振動源からの基準信号に基づいて振動を低減化しているために、下記の2つの問題が生じていた。
【0009】
1.一次振動源から基準信号を検出する手段、例えば、前記図4の振動センサ101や他の検出手段(パルスカウンタ等)が必要であり、このためにコストが増加していた。
【0010】
2.振動を生ずる原因や振動の伝達経路を突き止めて、これを一次振動源としなければならなかった。特に、車両が走行するときに発生するロードノイズを低減化させる場合に一次振動源を特定するのは非常に困難であった。なぜなら、ロードノイズは、道路の凹凸がすべてのタイヤやサスペンションを介して車体の各部に伝達されて騒音音場が形成されるために、振動伝達経路が複雑であるとともに多部位が一次振動源とみなされるからである。
【0011】
以上の問題点を解消するために、前記能動振動制御装置から単に一次振動源の振動を検出する手段(図4の振動センサ101)を取り除いた構成により能動振動制御を行う方法が考えられる。しかし、この方法により能動振動制御を行うと、被制御対象である振動が周期性振動であったとしても、制御性能が著しく低下する。この原因としては、下記の2点が考えられる。
【0012】
1.能動振動制御装置から出力された相殺振動により、被制御対象である振動(騒音)が低減されると、その低減された振動が相殺誤差として能動振動制御装置に供給される。この相殺誤差は能動振動制御がなされた後のものであるために、一般にその信号レベルは低下している。したがって、能動振動制御装置はこの相殺誤差に基づいて次の相殺振動を生成するために、その相殺振動のレベルは低下し、被制御対象である振動を低減することができなくなる。この理由を図4を参照して具体的に説明すると、次のようになる。
【0013】
この場合には参照信号x(n)は誤差信号e(n)であるので、適応制御回路102からの出力信号y(n)は、下記の数式(1)で表される。
y(n)=Wn−1×e(n) ‥‥(1)
ここで、Wn−1はフィルタ係数の前回値である。能動制御後は、e(n)は“0”に近づくために、その結果、y(n)も“0”に近づき、スピーカ103からは信号レベルの低下した相殺振動が出力されることになる。しかし、被制御対象である振動の信号レベルは依然として元のままであるために能動振動制御の効果が著しく低下することになる。
【0014】
2.仮に、上記1の原因が解消されたとしても、低減された振動とは異なる周波数の振動エネルギーが増大してハウリングと呼ばれる現象、即ち、被制御対象である振動と同一振幅で逆位相の振動(相殺振動)をうまく生成することができずに図4のマイクロフォン104近傍で相殺振動が発散する現象が起こる場合がある。特に、適応フィルタの次数が低い場合にこの現象が多く発生する。
【0015】
本発明は、上記問題に鑑みてなされたもので、一次振動源の振動を検出する手段を取り除いてコストを低減させるとともに、この検出手段を取り除くことによる制御性能の低下を防止することが可能な能動振動制御装置を提供することを目的とする。
【0016】
【課題を解決するための手段】
上記目的を達成するため本発明は、駆動信号に応じた相殺振動を被制御空間に発生する相殺振動発生手段を備え、該相殺振動と前記被制御空間に発生した原振動とを干渉させることによりその原振動を低減させる能動振動制御装置において、前記被制御空間に発生した相殺誤差振動に応じた誤差信号を検出する誤差信号検出手段と、前記駆動信号を生成する駆動信号生成手段と、該駆動信号生成手段によって生成された駆動信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が相殺振動を発生しないときの、前記被制御空間に発生した原振動に応じた原振動信号を推定する第1の推定手段と、該第1の推定手段によって推定された原振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような第1の相殺信号を生成する第1の相殺信号生成手段と、第2の相殺信号を生成する第2の相殺信号生成手段と、該第2の相殺信号生成手段によって生成された第2の相殺信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が前記第2の相殺信号に応じた相殺振動を発生しないときの、前記被制御空間に発生した振動に応じた振動信号を推定する第2の推定手段とを有し、前記第2の相殺信号生成手段は、前記第2の推定手段によって推定された振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような前記第2の相殺信号を生成することで、前記第1の相殺信号に応じた相殺振動によって発生することがあるハウリングを防止し、前記駆動信号生成手段は、前記第1および第2の相殺信号生成手段によってそれぞれ生成された第1および第2の相殺信号を加算することによって、前記駆動信号を生成することを特徴とする。
【0019】
【実施例】
以下、本発明の実施例を図面に基づいて詳細に説明する。
【0020】
図1は、本発明の一実施例に係る能動振動制御装置の概略構成を示すブロック図であり、本実施例は本発明を自動車の車室内騒音低減化装置に適用したものである。
【0021】
同図において、1は制御すべき空間(被制御空間)、即ち車室であり、自動車の走行等により発生した振動が所定の伝達経路を経て車室1の構成要素に伝達され、その構成要素(振動部)が振動されて一次振動(騒音)Xが発生される。ここで、車室1は、その空間に特有の伝達特性Cを有するものとする。
【0022】
車室1の所定位置には、車室1内の振動(騒音)を検出するための振動検出手段(本実施例では、主としてマイクロフォン)2が配設され、車室1内の一次振動Xを含む振動、即ち、後述する相殺振動が出力されているときには一次振動Xと相殺振動とが干渉された後の振動が振動検出手段2により検出され、デジタル信号に変換された後に、検出信号e(n)(n=1,2,…)としてデジタル演算装置3に供給される。
【0023】
デジタル演算装置3は、供給された検出信号e(n)に基づいてデジタル演算を施すことにより駆動信号Y(n)(n=1,2,…)を生成し(厳密には、検出信号e(n−1)および駆動信号Y(n−1)に基づいて駆動信号Y(n)を生成する)、その駆動信号Y(n)を、デジタル演算装置3の出力側に接続され、車室1の所定位置に配設された二次振動源(本実施例では、主としてスピーカ)4に供給する。駆動信号Y(n)は、二次振動源4により前記一次振動Xを相殺する相殺振動となって車室1に供給され、車室1では該相殺振動と一次振動Xとが干渉し合うことにより車室内騒音が低減される。
【0024】
デジタル演算装置3は、車室1の振動部の原振動(一次振動X)を推定する推定手段(予測手段)5と、前述したハウリングを検知するハウリング検知手段6と、2つの適応フィルタ7,8と、前記駆動信号Y(n)を発生する駆動信号発生手段(相殺信号発生手段)9とにより構成されている。一次振動Xと相殺信号とが干渉された後の振動(誤差)は前述のように振動検出手段2により検出され、その検出信号e(n)は推定手段5およびハウリング検知手段6に入力され、推定手段5およびハウリング検知手段6の出力は、それぞれ適応フィルタ7,8に供給される。適応フィルタ7,8からそれぞれ発生される出力は駆動信号発生手段9に供給され、駆動信号発生手段9の出力である駆動信号Y(n)は、前述のように二次振動源4に供給されるとともに、推定手段5にフィードバックされる。
【0025】
図2は、図1の各要素の詳細な構成を示すブロック図である。
【0026】
同図中、振動検出手段2は、車室内騒音を検出するマイクロフォン21と、マイクロフォン21により検出されたアナログ信号をデジタル信号に変換するA/D変換器22とにより構成されている。
【0027】
推定手段5は、前記検出信号e(n)と後述するフィルタ53によりフィルタリングされた駆動信号とを加算する加算器51と、前記伝達特性Cを同定した伝達特性C^を有するフィルタ52,53と、前述したLMSアルゴリズムにより前記適応フィルタ7のフィルタ係数を更新するLMS処理部54とにより構成されている。ハウリング検知手段6も、推定手段5と同様に、加算器61と、伝達特性C^を有するフィルタ62,63と、LMS処理部64とにより構成されている。
【0028】
また、前記適応フィルタ7は、フィルタ係数W1を有する適応フィルタ(ADF7)により構成され、前記適応フィルタ8は、フィルタ係数W2を有する適応フィルタ(ADF8)により構成され、前記駆動信号発生手段9は、加算器9により構成されている。
【0029】
さらに、二次振動源4は、加算器9から出力されるデジタル駆動信号Y(n)をアナログ信号に変換するD/A変換器42と、アナログ駆動信号Yを二次振動に変換するスピーカ41とにより構成されている。
【0030】
なお、具体的には、LMS処理部54は、下記の数式(2)によりADF7のフィルタ係数を更新する処理を行い、LMS処理部64は、下記の数式(3)によりADF8のフィルタ係数Wnを更新する処理を行う。
【0031】
【数1】
 ここで、μ1,μ2は、フィルタ係数更新パラメータであり、互いに異なる値を採ってもよいが、本実施例では共通の値とし、具体的には値0.1を採っている。
ここで、μ1,μ2は、フィルタ係数更新パラメータであり、互いに異なる値を採ってもよいが、本実施例では共通の値とし、具体的には値0.1を採っている。
【0032】
次に、デジタル演算装置3を構成する各要素の接続関係を説明する。
【0033】
A/D変換器22の出力側は、加算器51、加算器61、LMS処理部54、LMS処理部64の一入力端子に接続されている。加算器51の他の入力端子には加算器9の出力側がフィルタ53を介して反転されて接続され、加算器61の他の入力端子にはADF8の出力側がフィルタ63を介して反転されて接続されている。
【0034】
加算器51の出力側は、ADF7の入力側に接続されるとともに、フィルタ52を介してLMS処理部54の他の入力端子に接続されている。同様にして、加算器61の出力側は、ADF8の入力側に接続されるとともに、フィルタ62を介してLMS処理部64の他の入力端子に接続されている。
【0035】
LMS処理部54の出力側は、ADF7のフィルタ係数を更新するためADF7に接続され、ADF7の出力側は、加算器9の一入力端子に接続されている。同様にして、LMS処理部64の出力側は、ADF8のフィルタ係数を更新するためADF8に接続され、ADF8の出力側は、加算器9の他の入力端子に接続されている。
【0036】
以下、以上のように構成された能動振動制御装置の制御処理を説明する。
【0037】
車室1の車室内騒音はマイクロフォン21により検出され、A/D変換器22によりデジタル変換され、検出信号(誤差信号)e(n)として加算器51、加算器61、LMS処理部54、LMS処理部64に供給される。
【0038】
加算器51では、加算器9からの駆動信号Y(n)がフィルタ53を介してフィルタリングされ、反転された信号−C^・Yと誤差信号e(n)とが加算され、信号a1(n)として出力される。該信号a1(n)は、ADF7に供給されるとともに、フィルタ52を介してフィルタリングされた信号C^・a1(以下、「信号r1(n)」という)となってLMS処理部54に供給される。LMS処理部54では、前記誤差信号e(n)、信号r1(n)と前記数式(2)とを用いて次回のADF7のフィルタ係数が算出された後に、ADF7のフィルタ係数が更新される。ADF7では、前回設定されたフィルタ係数Wnにより前記信号a1(n)がフィルタリングされ、信号y1(n+1)(=Wn・a1)として加算器9に供給される。
【0039】
加算器61では、ADF8からの出力信号y2(n)がフィルタ63を介してフィルタリングされ、反転された信号−C^・y2と誤差信号e(n)とが加算され、信号a2(n)として出力される。これ以降の処理は、前述の処理と同様であるので、その説明を省略する。
【0040】
前記ADF7からの出力y1(n+1)および前記ADF8からの出力y2(n+1)は、加算器9により加算され、デジタル駆動信号Y(n+1)として前記D/A変換器42に供給され、D/A変換器42からのアナログ駆動信号は、スピーカ41により相殺振動として車室1に供給される。この相殺振動と一次振動Xとが干渉され、車室内騒音が低減される。
【0041】
なお、ハウリングが発生すると、そのハウリングが前記ADF7からの信号y1(n)によって発生したものである場合には、そのハウリングは検出信号e(n)として前記ハウリング検知手段6に供給され、そのLMS処理部64により、ハウリングを相殺するようにフィルタ係数が算出され、このフィルタ係数に応じてADF8から駆動信号y2(n)が出力されることによりハウリングが相殺される。一方、前記ハウリングがADF8からの信号y2(n)によって発生したものである場合には、そのハウリングは検出信号e(n)として前記推定手段5に供給され、そのLMS処理部54により、ハウリングを相殺するようにフィルタ係数が算出され、このフィルタ係数に応じてADF7から駆動信号y1(n)が出力されることによりハウリングが相殺される。このようにして、各ADF7,8は、お互いの出力を常に監視し合うことによりハウリングを防止するように制御する。
【0042】
図3は、本実施例を車室内騒音制御に適用したときと適用しないときのマイクロフォン21から検出された信号レベルの周波数分布を示した図である。
【0043】
同図中、縦軸は信号レベル(dB)を示し、横軸は周波数(Hz)を示している。また、実線で示す曲線g1は、本実施例を適用したときの周波数分布を示し、破線で示す曲線g2は、本実施例を適用しなかったとき、即ち一次振動Xそのものを検出したときの周波数分布を示している。同図から分かるように、本実施例の能動振動制御を行うことにより、特に信号レベルの高い周波数部分pが低減される。
【0044】
以上説明したように、本実施例に依れば、推定手段5により前記従来例の参照信号に代わる信号を平衡点制御量として生成して一次振動Xを低減する制御性能の低下を防止し、ハウリング検知手段6により参照信号を検出する検出手段を取り除いたときに発生することがあるハウリングを防止するので、参照信号を検出する検出手段を取り除いてコストを低減させることができるとともに、その検出手段を配設する位置を決定するための煩雑な処理を除くことができる。
【0045】
【発明の効果】
以上説明したように、本発明によれば、駆動信号に応じた相殺振動を被制御空間に発生する相殺振動発生手段を備え、該相殺振動と前記被制御空間に発生した原振動とを干渉させることによりその原振動を低減させる能動振動制御装置において、前記被制御空間に発生した相殺誤差振動に応じた誤差信号を検出する誤差信号検出手段と、前記駆動信号を生成する駆動信号生成手段と、該駆動信号生成手段によって生成された駆動信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が相殺振動を発生しないときの、前記被制御空間に発生した原振動に応じた原振動信号を推定する第1の推定手段と、該第1の推定手段によって推定された原振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような第1の相殺信号を生成する第1の相殺信号生成手段と、第2の相殺信号を生成する第2の相殺信号生成手段と、該第2の相殺信号生成手段によって生成された第2の相殺信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が前記第2の相殺信号に応じた相殺振動を発生しないときの、前記被制御空間に発生した振動に応じた振動信号を推定する第2の推定手段とを有し、前記第2の相殺信号生成手段は、前記第2の推定手段によって推定された振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような前記第2の相殺信号を生成することで、前記第1の相殺信号に応じた相殺振動によって発生することがあるハウリングを防止し、前記駆動信号生成手段は、前記第1および第2の相殺信号生成手段によってそれぞれ生成された第1および第2の相殺信号を加算することによって、前記駆動信号を生成するので、一次振動源の振動を検出する手段を取り除いてコストを低減させるとともに、この検出手段を取り除くことによる制御性能の低下を防止することが可能となる効果を奏する。
【0046】
また、第1および第2の相殺信号が前記相殺振動発生手段の駆動信号として供給されるので、一方の適応フィルタが他方の適応フィルタの発散を常に監視することができ、ハウリングの発生をさらによく防止することができる。
【図面の簡単な説明】
【図1】本発明の一実施例に係る能動振動制御装置の概略構成を示すブロック図である。
【図2】図1の各要素の詳細な構成を示すブロック図である。
【図3】本実施例を車室内騒音制御に適用したときと適用しないときの図2のマイクロフォンから検出された信号レベルの周波数分布を示した図である。
【図4】従来の能動振動制御装置の概略構成を示すブロック図である。
【符号の説明】
41 スピーカ(相殺振動発生手段)
42 D/A変換器(相殺振動発生手段)
21 マイクロフォン(振動検出手段)
22 A/D変換器(振動検出手段)
51 加算器(予測手段、ハウリング防止手段)
52,53 フィルタ(予測手段、ハウリング防止手段)
54 LMS処理部(予測手段、ハウリング防止手段)
61 加算器(ハウリング防止手段)
62,63 フィルタ(ハウリング防止手段)
64 LMS処理部(ハウリング防止手段)
9 加算器(予測手段、ハウリング防止手段)
【産業上の利用分野】
本発明は、能動振動制御装置に関し、特に車輌の走行等により発生する振動及びこれらの振動に起因して生ずる騒音を能動的に制御して低減させる能動振動制御装置に関する。
【0002】
【従来の技術】
本発明における「振動」の語は、「騒音」をも含めた意味で使用する。
【0003】
振動制御装置のうち、振動源(一次振動源)から発生する振動を能動的に制御して振動および騒音の低減化を図る能動振動制御装置と呼称されるものがある。
【0004】
従来、この種の能動振動制御装置としては、図4に示すように、一次振動源からの振動を検出する振動センサ101と、該振動センサ101により検出された振動が参照信号として入力され、その参照信号に基づいて制御空間における制御対象振動と逆位相の相殺信号を生成する適応制御回路102と、適応制御回路102により生成された相殺信号に基づいて相殺振動を発するスピーカ(二次振動源)103と、スピーカ103により発せられた相殺振動と前記参照信号との相殺誤差を検出するマイクロホン104とを主要部として構成されたものが知られている(例えば、特表平1−501344号公報)。
【0005】
上記従来の能動振動制御装置においては、振動センサ101により検出された一次振動はA/Dコンバータ105によってサンプリングされ、デジタルデータの基準信号(参照信号)x(n)として適応制御回路102に入力される。該適応制御回路102からは上述のように生成された相殺信号が出力されてD/Aコンバータ106でアナログ信号に変換され、アンプ107により増幅されてスピーカ103から相殺振動(二次振動)が発せられる。
【0006】
一方、マイクロホン104はスピーカ103からの相殺振動と振動源からの振動との相殺誤差を受信し、該相殺誤差εはアンプ108により増幅され、A/Dコンバータ109によりサンプリングされ、デジタルデータの誤差信号e(n)として取り出され、適応制御回路102にフィードバックされる。すなわち、誤差信号は、一次振動と二次振動との相殺誤差を示すものであり、上記能動振動制御装置においては前記誤差信号が最小値となるように相殺信号の伝達特性を変更することにより振動の低減が図られている。
【0007】
更に、適応制御回路102は、FIR型適応デジタルフィルタ(以下、「ADF」という)1021と、スピーカ103からマイクロホン104までの、この制御系特有の伝達特性が同定されて設定されたフィルタC^1022と、参照信号x(n)がフィルタC^1022によりフィルタリングされた参照信号r(n)および前記誤差信号e(n)に基づいて、例えば、LMSアルゴリズム(LMS:Least Mean Square)によりADF1021のフィルタ係数を更新するLMS処理部1023とにより構成される。参照信号x(n)がフィルタC^1022によりフィルタリングされた参照信号r(n)および前記誤差信号e(n)に基づいて、LMS処理部1023は誤差信号e(n)が最小値となるようにADF1021のフィルタ係数を更新する。
【0008】
【発明が解決しようとする課題】
しかしながら、上記従来の能動振動制御装置では、一次振動源からの基準信号に基づいて振動を低減化しているために、下記の2つの問題が生じていた。
【0009】
1.一次振動源から基準信号を検出する手段、例えば、前記図4の振動センサ101や他の検出手段(パルスカウンタ等)が必要であり、このためにコストが増加していた。
【0010】
2.振動を生ずる原因や振動の伝達経路を突き止めて、これを一次振動源としなければならなかった。特に、車両が走行するときに発生するロードノイズを低減化させる場合に一次振動源を特定するのは非常に困難であった。なぜなら、ロードノイズは、道路の凹凸がすべてのタイヤやサスペンションを介して車体の各部に伝達されて騒音音場が形成されるために、振動伝達経路が複雑であるとともに多部位が一次振動源とみなされるからである。
【0011】
以上の問題点を解消するために、前記能動振動制御装置から単に一次振動源の振動を検出する手段(図4の振動センサ101)を取り除いた構成により能動振動制御を行う方法が考えられる。しかし、この方法により能動振動制御を行うと、被制御対象である振動が周期性振動であったとしても、制御性能が著しく低下する。この原因としては、下記の2点が考えられる。
【0012】
1.能動振動制御装置から出力された相殺振動により、被制御対象である振動(騒音)が低減されると、その低減された振動が相殺誤差として能動振動制御装置に供給される。この相殺誤差は能動振動制御がなされた後のものであるために、一般にその信号レベルは低下している。したがって、能動振動制御装置はこの相殺誤差に基づいて次の相殺振動を生成するために、その相殺振動のレベルは低下し、被制御対象である振動を低減することができなくなる。この理由を図4を参照して具体的に説明すると、次のようになる。
【0013】
この場合には参照信号x(n)は誤差信号e(n)であるので、適応制御回路102からの出力信号y(n)は、下記の数式(1)で表される。
y(n)=Wn−1×e(n) ‥‥(1)
ここで、Wn−1はフィルタ係数の前回値である。能動制御後は、e(n)は“0”に近づくために、その結果、y(n)も“0”に近づき、スピーカ103からは信号レベルの低下した相殺振動が出力されることになる。しかし、被制御対象である振動の信号レベルは依然として元のままであるために能動振動制御の効果が著しく低下することになる。
【0014】
2.仮に、上記1の原因が解消されたとしても、低減された振動とは異なる周波数の振動エネルギーが増大してハウリングと呼ばれる現象、即ち、被制御対象である振動と同一振幅で逆位相の振動(相殺振動)をうまく生成することができずに図4のマイクロフォン104近傍で相殺振動が発散する現象が起こる場合がある。特に、適応フィルタの次数が低い場合にこの現象が多く発生する。
【0015】
本発明は、上記問題に鑑みてなされたもので、一次振動源の振動を検出する手段を取り除いてコストを低減させるとともに、この検出手段を取り除くことによる制御性能の低下を防止することが可能な能動振動制御装置を提供することを目的とする。
【0016】
【課題を解決するための手段】
上記目的を達成するため本発明は、駆動信号に応じた相殺振動を被制御空間に発生する相殺振動発生手段を備え、該相殺振動と前記被制御空間に発生した原振動とを干渉させることによりその原振動を低減させる能動振動制御装置において、前記被制御空間に発生した相殺誤差振動に応じた誤差信号を検出する誤差信号検出手段と、前記駆動信号を生成する駆動信号生成手段と、該駆動信号生成手段によって生成された駆動信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が相殺振動を発生しないときの、前記被制御空間に発生した原振動に応じた原振動信号を推定する第1の推定手段と、該第1の推定手段によって推定された原振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような第1の相殺信号を生成する第1の相殺信号生成手段と、第2の相殺信号を生成する第2の相殺信号生成手段と、該第2の相殺信号生成手段によって生成された第2の相殺信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が前記第2の相殺信号に応じた相殺振動を発生しないときの、前記被制御空間に発生した振動に応じた振動信号を推定する第2の推定手段とを有し、前記第2の相殺信号生成手段は、前記第2の推定手段によって推定された振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような前記第2の相殺信号を生成することで、前記第1の相殺信号に応じた相殺振動によって発生することがあるハウリングを防止し、前記駆動信号生成手段は、前記第1および第2の相殺信号生成手段によってそれぞれ生成された第1および第2の相殺信号を加算することによって、前記駆動信号を生成することを特徴とする。
【0019】
【実施例】
以下、本発明の実施例を図面に基づいて詳細に説明する。
【0020】
図1は、本発明の一実施例に係る能動振動制御装置の概略構成を示すブロック図であり、本実施例は本発明を自動車の車室内騒音低減化装置に適用したものである。
【0021】
同図において、1は制御すべき空間(被制御空間)、即ち車室であり、自動車の走行等により発生した振動が所定の伝達経路を経て車室1の構成要素に伝達され、その構成要素(振動部)が振動されて一次振動(騒音)Xが発生される。ここで、車室1は、その空間に特有の伝達特性Cを有するものとする。
【0022】
車室1の所定位置には、車室1内の振動(騒音)を検出するための振動検出手段(本実施例では、主としてマイクロフォン)2が配設され、車室1内の一次振動Xを含む振動、即ち、後述する相殺振動が出力されているときには一次振動Xと相殺振動とが干渉された後の振動が振動検出手段2により検出され、デジタル信号に変換された後に、検出信号e(n)(n=1,2,…)としてデジタル演算装置3に供給される。
【0023】
デジタル演算装置3は、供給された検出信号e(n)に基づいてデジタル演算を施すことにより駆動信号Y(n)(n=1,2,…)を生成し(厳密には、検出信号e(n−1)および駆動信号Y(n−1)に基づいて駆動信号Y(n)を生成する)、その駆動信号Y(n)を、デジタル演算装置3の出力側に接続され、車室1の所定位置に配設された二次振動源(本実施例では、主としてスピーカ)4に供給する。駆動信号Y(n)は、二次振動源4により前記一次振動Xを相殺する相殺振動となって車室1に供給され、車室1では該相殺振動と一次振動Xとが干渉し合うことにより車室内騒音が低減される。
【0024】
デジタル演算装置3は、車室1の振動部の原振動(一次振動X)を推定する推定手段(予測手段)5と、前述したハウリングを検知するハウリング検知手段6と、2つの適応フィルタ7,8と、前記駆動信号Y(n)を発生する駆動信号発生手段(相殺信号発生手段)9とにより構成されている。一次振動Xと相殺信号とが干渉された後の振動(誤差)は前述のように振動検出手段2により検出され、その検出信号e(n)は推定手段5およびハウリング検知手段6に入力され、推定手段5およびハウリング検知手段6の出力は、それぞれ適応フィルタ7,8に供給される。適応フィルタ7,8からそれぞれ発生される出力は駆動信号発生手段9に供給され、駆動信号発生手段9の出力である駆動信号Y(n)は、前述のように二次振動源4に供給されるとともに、推定手段5にフィードバックされる。
【0025】
図2は、図1の各要素の詳細な構成を示すブロック図である。
【0026】
同図中、振動検出手段2は、車室内騒音を検出するマイクロフォン21と、マイクロフォン21により検出されたアナログ信号をデジタル信号に変換するA/D変換器22とにより構成されている。
【0027】
推定手段5は、前記検出信号e(n)と後述するフィルタ53によりフィルタリングされた駆動信号とを加算する加算器51と、前記伝達特性Cを同定した伝達特性C^を有するフィルタ52,53と、前述したLMSアルゴリズムにより前記適応フィルタ7のフィルタ係数を更新するLMS処理部54とにより構成されている。ハウリング検知手段6も、推定手段5と同様に、加算器61と、伝達特性C^を有するフィルタ62,63と、LMS処理部64とにより構成されている。
【0028】
また、前記適応フィルタ7は、フィルタ係数W1を有する適応フィルタ(ADF7)により構成され、前記適応フィルタ8は、フィルタ係数W2を有する適応フィルタ(ADF8)により構成され、前記駆動信号発生手段9は、加算器9により構成されている。
【0029】
さらに、二次振動源4は、加算器9から出力されるデジタル駆動信号Y(n)をアナログ信号に変換するD/A変換器42と、アナログ駆動信号Yを二次振動に変換するスピーカ41とにより構成されている。
【0030】
なお、具体的には、LMS処理部54は、下記の数式(2)によりADF7のフィルタ係数を更新する処理を行い、LMS処理部64は、下記の数式(3)によりADF8のフィルタ係数Wnを更新する処理を行う。
【0031】
【数1】
【0032】
次に、デジタル演算装置3を構成する各要素の接続関係を説明する。
【0033】
A/D変換器22の出力側は、加算器51、加算器61、LMS処理部54、LMS処理部64の一入力端子に接続されている。加算器51の他の入力端子には加算器9の出力側がフィルタ53を介して反転されて接続され、加算器61の他の入力端子にはADF8の出力側がフィルタ63を介して反転されて接続されている。
【0034】
加算器51の出力側は、ADF7の入力側に接続されるとともに、フィルタ52を介してLMS処理部54の他の入力端子に接続されている。同様にして、加算器61の出力側は、ADF8の入力側に接続されるとともに、フィルタ62を介してLMS処理部64の他の入力端子に接続されている。
【0035】
LMS処理部54の出力側は、ADF7のフィルタ係数を更新するためADF7に接続され、ADF7の出力側は、加算器9の一入力端子に接続されている。同様にして、LMS処理部64の出力側は、ADF8のフィルタ係数を更新するためADF8に接続され、ADF8の出力側は、加算器9の他の入力端子に接続されている。
【0036】
以下、以上のように構成された能動振動制御装置の制御処理を説明する。
【0037】
車室1の車室内騒音はマイクロフォン21により検出され、A/D変換器22によりデジタル変換され、検出信号(誤差信号)e(n)として加算器51、加算器61、LMS処理部54、LMS処理部64に供給される。
【0038】
加算器51では、加算器9からの駆動信号Y(n)がフィルタ53を介してフィルタリングされ、反転された信号−C^・Yと誤差信号e(n)とが加算され、信号a1(n)として出力される。該信号a1(n)は、ADF7に供給されるとともに、フィルタ52を介してフィルタリングされた信号C^・a1(以下、「信号r1(n)」という)となってLMS処理部54に供給される。LMS処理部54では、前記誤差信号e(n)、信号r1(n)と前記数式(2)とを用いて次回のADF7のフィルタ係数が算出された後に、ADF7のフィルタ係数が更新される。ADF7では、前回設定されたフィルタ係数Wnにより前記信号a1(n)がフィルタリングされ、信号y1(n+1)(=Wn・a1)として加算器9に供給される。
【0039】
加算器61では、ADF8からの出力信号y2(n)がフィルタ63を介してフィルタリングされ、反転された信号−C^・y2と誤差信号e(n)とが加算され、信号a2(n)として出力される。これ以降の処理は、前述の処理と同様であるので、その説明を省略する。
【0040】
前記ADF7からの出力y1(n+1)および前記ADF8からの出力y2(n+1)は、加算器9により加算され、デジタル駆動信号Y(n+1)として前記D/A変換器42に供給され、D/A変換器42からのアナログ駆動信号は、スピーカ41により相殺振動として車室1に供給される。この相殺振動と一次振動Xとが干渉され、車室内騒音が低減される。
【0041】
なお、ハウリングが発生すると、そのハウリングが前記ADF7からの信号y1(n)によって発生したものである場合には、そのハウリングは検出信号e(n)として前記ハウリング検知手段6に供給され、そのLMS処理部64により、ハウリングを相殺するようにフィルタ係数が算出され、このフィルタ係数に応じてADF8から駆動信号y2(n)が出力されることによりハウリングが相殺される。一方、前記ハウリングがADF8からの信号y2(n)によって発生したものである場合には、そのハウリングは検出信号e(n)として前記推定手段5に供給され、そのLMS処理部54により、ハウリングを相殺するようにフィルタ係数が算出され、このフィルタ係数に応じてADF7から駆動信号y1(n)が出力されることによりハウリングが相殺される。このようにして、各ADF7,8は、お互いの出力を常に監視し合うことによりハウリングを防止するように制御する。
【0042】
図3は、本実施例を車室内騒音制御に適用したときと適用しないときのマイクロフォン21から検出された信号レベルの周波数分布を示した図である。
【0043】
同図中、縦軸は信号レベル(dB)を示し、横軸は周波数(Hz)を示している。また、実線で示す曲線g1は、本実施例を適用したときの周波数分布を示し、破線で示す曲線g2は、本実施例を適用しなかったとき、即ち一次振動Xそのものを検出したときの周波数分布を示している。同図から分かるように、本実施例の能動振動制御を行うことにより、特に信号レベルの高い周波数部分pが低減される。
【0044】
以上説明したように、本実施例に依れば、推定手段5により前記従来例の参照信号に代わる信号を平衡点制御量として生成して一次振動Xを低減する制御性能の低下を防止し、ハウリング検知手段6により参照信号を検出する検出手段を取り除いたときに発生することがあるハウリングを防止するので、参照信号を検出する検出手段を取り除いてコストを低減させることができるとともに、その検出手段を配設する位置を決定するための煩雑な処理を除くことができる。
【0045】
【発明の効果】
以上説明したように、本発明によれば、駆動信号に応じた相殺振動を被制御空間に発生する相殺振動発生手段を備え、該相殺振動と前記被制御空間に発生した原振動とを干渉させることによりその原振動を低減させる能動振動制御装置において、前記被制御空間に発生した相殺誤差振動に応じた誤差信号を検出する誤差信号検出手段と、前記駆動信号を生成する駆動信号生成手段と、該駆動信号生成手段によって生成された駆動信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が相殺振動を発生しないときの、前記被制御空間に発生した原振動に応じた原振動信号を推定する第1の推定手段と、該第1の推定手段によって推定された原振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような第1の相殺信号を生成する第1の相殺信号生成手段と、第2の相殺信号を生成する第2の相殺信号生成手段と、該第2の相殺信号生成手段によって生成された第2の相殺信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が前記第2の相殺信号に応じた相殺振動を発生しないときの、前記被制御空間に発生した振動に応じた振動信号を推定する第2の推定手段とを有し、前記第2の相殺信号生成手段は、前記第2の推定手段によって推定された振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような前記第2の相殺信号を生成することで、前記第1の相殺信号に応じた相殺振動によって発生することがあるハウリングを防止し、前記駆動信号生成手段は、前記第1および第2の相殺信号生成手段によってそれぞれ生成された第1および第2の相殺信号を加算することによって、前記駆動信号を生成するので、一次振動源の振動を検出する手段を取り除いてコストを低減させるとともに、この検出手段を取り除くことによる制御性能の低下を防止することが可能となる効果を奏する。
【0046】
また、第1および第2の相殺信号が前記相殺振動発生手段の駆動信号として供給されるので、一方の適応フィルタが他方の適応フィルタの発散を常に監視することができ、ハウリングの発生をさらによく防止することができる。
【図面の簡単な説明】
【図1】本発明の一実施例に係る能動振動制御装置の概略構成を示すブロック図である。
【図2】図1の各要素の詳細な構成を示すブロック図である。
【図3】本実施例を車室内騒音制御に適用したときと適用しないときの図2のマイクロフォンから検出された信号レベルの周波数分布を示した図である。
【図4】従来の能動振動制御装置の概略構成を示すブロック図である。
【符号の説明】
41 スピーカ(相殺振動発生手段)
42 D/A変換器(相殺振動発生手段)
21 マイクロフォン(振動検出手段)
22 A/D変換器(振動検出手段)
51 加算器(予測手段、ハウリング防止手段)
52,53 フィルタ(予測手段、ハウリング防止手段)
54 LMS処理部(予測手段、ハウリング防止手段)
61 加算器(ハウリング防止手段)
62,63 フィルタ(ハウリング防止手段)
64 LMS処理部(ハウリング防止手段)
9 加算器(予測手段、ハウリング防止手段)
Claims (1)
- 駆動信号に応じた相殺振動を被制御空間に発生する相殺振動発生手段を備え、該相殺振動と前記被制御空間に発生した原振動とを干渉させることによりその原振動を低減させる能動振動制御装置において、
前記被制御空間に発生した相殺誤差振動に応じた誤差信号を検出する誤差信号検出手段と、
前記駆動信号を生成する駆動信号生成手段と、
該駆動信号生成手段によって生成された駆動信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が相殺振動を発生しないときの、前記被制御空間に発生した原振動に応じた原振動信号を推定する第1の推定手段と、
該第1の推定手段によって推定された原振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような第1の相殺信号を生成する第1の相殺信号生成手段と、
第2の相殺信号を生成する第2の相殺信号生成手段と、
該第2の相殺信号生成手段によって生成された第2の相殺信号に応じた相殺振動を前記相殺振動発生手段によって発生したときに、前記被制御空間に発生する相殺振動に応じた相殺信号を推定し、該推定された相殺信号を反転させ、前記誤差信号検出手段によって検出された誤差信号と加算することにより、前記相殺振動発生手段が前記第2の相殺信号に応じた相殺振動を発生しないときの、前記被制御空間に発生した振動に応じた振動信号を推定する第2の推定手段とを有し、
前記第2の相殺信号生成手段は、前記第2の推定手段によって推定された振動信号および前記検出された誤差信号に基づいて、該誤差信号が最小となるような前記第2の相殺信号を生成することで、前記第1の相殺信号に応じた相殺振動によって発生することがあるハウリングを防止し、
前記駆動信号生成手段は、前記第1および第2の相殺信号生成手段によってそれぞれ生成された第1および第2の相殺信号を加算することによって、前記駆動信号を生成する
ことを特徴とする能動振動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03534194A JP3630171B2 (ja) | 1994-02-07 | 1994-02-07 | 能動振動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03534194A JP3630171B2 (ja) | 1994-02-07 | 1994-02-07 | 能動振動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH07219565A JPH07219565A (ja) | 1995-08-18 |
| JP3630171B2 true JP3630171B2 (ja) | 2005-03-16 |
Family
ID=12439162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP03534194A Expired - Fee Related JP3630171B2 (ja) | 1994-02-07 | 1994-02-07 | 能動振動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3630171B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008247308A (ja) * | 2007-03-30 | 2008-10-16 | Honda Motor Co Ltd | 能動型騒音制御装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4590389B2 (ja) * | 2006-11-30 | 2010-12-01 | 本田技研工業株式会社 | 能動型振動騒音制御装置 |
| CN104471638B (zh) * | 2012-07-02 | 2017-05-17 | 松下知识产权经营株式会社 | 有源降噪装置以及有源降噪方法 |
| JP7745909B2 (ja) * | 2022-02-08 | 2025-09-30 | シェンチェン ショックス カンパニー リミテッド | アクティブノイズキャンセルオーディオ装置、アクティブノイズキャンセル方法及び記憶媒体 |
-
1994
- 1994-02-07 JP JP03534194A patent/JP3630171B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008247308A (ja) * | 2007-03-30 | 2008-10-16 | Honda Motor Co Ltd | 能動型騒音制御装置 |
| US8111835B2 (en) | 2007-03-30 | 2012-02-07 | Honda Motor Co., Ltd. | Active noise control apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH07219565A (ja) | 1995-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8098837B2 (en) | Active noise control apparatus | |
| KR100238630B1 (ko) | 잡음 저감 장치 | |
| US11127391B2 (en) | Active vibratory noise reduction system | |
| EP0742971B1 (en) | Adaptive feedforward and feedback control system | |
| US11694672B2 (en) | Active noise control device and vehicle | |
| WO2000014731A1 (en) | Apparatus and method for transmitting an improved voice signal over a communications device located in a vehicle with adaptive vibration noise cancellation | |
| CN114616619B (zh) | 主动降噪装置、移动体装置以及主动降噪方法 | |
| JP3630171B2 (ja) | 能動振動制御装置 | |
| JP3549120B2 (ja) | 車両用能動振動制御装置 | |
| KR102012679B1 (ko) | 주파수 대역별 발산 억제에 의한 능동소음제어 방법 및 시스템 | |
| CN115083383A (zh) | 主动型噪音控制系统 | |
| JP3372572B2 (ja) | 車輌用能動振動騒音制御装置 | |
| JPH07281676A (ja) | 能動型振動騒音制御装置 | |
| JP2000330572A (ja) | 能動型騒音制御装置 | |
| KR102364070B1 (ko) | 피드백 및 피드포워드 통합 능동소음제어의 주파수 영역 안정화 방법 및 시스템 | |
| JPH06138888A (ja) | 能動振動制御装置 | |
| JPH07210179A (ja) | 能動消音装置 | |
| JP3503155B2 (ja) | 能動型騒音制御装置及び能動型振動制御装置 | |
| JP3661063B2 (ja) | 車両用能動振動騒音制御装置 | |
| JP7599788B2 (ja) | 能動型騒音制御システム | |
| JPH0659684A (ja) | 能動振動制御装置 | |
| KR19990042877A (ko) | 자동차의 능동 소음 제어방법 | |
| JP3294340B2 (ja) | 車輌用振動制御装置 | |
| JP4133710B2 (ja) | 適応制御のスペクトルピーク平坦化処理 | |
| JP2000259158A (ja) | 車体パネルのアクティブ振動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041208 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |