JP3632096B2 - ソレノイド駆動装置 - Google Patents
ソレノイド駆動装置 Download PDFInfo
- Publication number
- JP3632096B2 JP3632096B2 JP19104097A JP19104097A JP3632096B2 JP 3632096 B2 JP3632096 B2 JP 3632096B2 JP 19104097 A JP19104097 A JP 19104097A JP 19104097 A JP19104097 A JP 19104097A JP 3632096 B2 JP3632096 B2 JP 3632096B2
- Authority
- JP
- Japan
- Prior art keywords
- solenoid
- value
- target value
- electrical control
- control amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Electromagnets (AREA)
- Feedback Control In General (AREA)
- Magnetically Actuated Valves (AREA)
- Control Of Transmission Device (AREA)
Description
【発明の属する技術分野】
本発明はソレノイド駆動装置に関し、例えば車両用の自動変速機において油圧制御に用いられるソレノイドの過渡応答を改善する技術に関する。
【0002】
【従来の技術】
従来から、ソレノイドに実際に流れる電流を検出し、この実際の電流が目標値になるように通電操作量(例えばデューティ)をフィードバック制御するよう構成し、ソレノイドの抵抗,温度,電源電圧のばらつきがあっても、目標電流に制御できるようにしたソレノイド駆動装置が知られている(特開平3−199757号公報,特開平8−148333号公報等参照)。
【0003】上記従来の電流フィードバック制御では、ローパスフィルタを介して検出電流を読み込んでフィードバック制御を行う構成であったり、補正しようとするばらつきが抵抗,温度,電源電圧等の比較的ゆっくりした変化要因であるため、制御ゲインも比較的小さく設定されていた。
【0004】
【発明が解決しようとする課題】
ところで、ソレノイドの可動部分(プランジャ,スプール)が動くときには、ソレノイドのインダクタンスが過渡的に変化するため、ソレノイド印加電圧に対する電流の応答特性が変わってしまい、ソレノイドの可動部分が動かない場合に比べて、1次遅れが増大することが実験的に明らかになった(図6参照)。
【0005】
しかし、上記従来のソレノイド駆動装置では、上記特性を考慮しておらず、専ら定常的な目標電流に対する偏差を吸収すべく、可動部分が動かない定常状態に適合して制御ゲイン等が決定されていたため、可動部分が動くときに、過渡的な電流の応答遅れが生じるという問題があった。
例えば油圧をソレノイドによって制御する自動変速機においては、ソレノイドの可動部分(プランジャ)を動かして油圧を変化させようとするときに、上記のようにして過渡的な電流の応答遅れが生じると、結果的に油圧変化の応答遅れをもたらしてしまうという問題が生じる。
【0006】
本発明は上記実情に鑑みなされたものであり、ソレノイドにおける過渡的な電流の応答遅れを改善して、例えば自動変速機における油圧制御の応答性を向上させることを目的とする。
【0007】
【課題を解決するための手段】
そのため請求項1記載の発明に係るソレノイド駆動装置は、ソレノイドの電気的制御量の目標値を演算する目標値演算手段と、前記電気的制御量の実際値を検出する電気的制御量検出手段と、前記目標値演算手段で演算された目標値に前記電気的制御量検出手段で検出される実際値が一致するように前記ソレノイドに対する通電操作量をフィードバック制御するフィードバック制御手段と、前記目標値の変化における微分値が所定値以上である状態を前記ソレノイドの可動部分が動く状態として判定し、前記微分値が所定値以上であると判定されたときに、前記通電操作量へのフィードホワード分の付加を開始し、前記微分値が大きいときほどより長く設定される時間が経過した時点で前記フィードホワード分の付加を終了させる補正手段と、を含んで構成される。
【0008】
かかる構成によると、前記ソレノイドの電気的制御量(例えば電流)の目標値に実際の値が一致するように通電操作量がフィードバック制御されるが、ソレノイドの可動部分が動く状態であると目標値の変化における微分値に基づいて判定されたときには、前記微分値が大きいときほどより長く設定される時間だけフィードバック補正分にフィードホワード分を付加して通電操作量を補正し、応答遅れの補償を図る。
【0009】
請求項2記載の発明に係るソレノイド駆動装置は、ソレノイドの電気的制御量の目標値を演算する目標値演算手段と、前記電気的制御量の実際値を検出する電気的制御量検出手段と、前記目標値演算手段で演算された目標値に前記電気的制御量検出手段で検出される実際値が一致するように前記ソレノイドに対する通電操作量をフィードバック制御するフィードバック制御手段と、前記目標値の変化における微分値が所定値以上である状態を前記ソレノイドの可動部分が動く状態として判定し、前記微分値が所定値以上であると判定されたときに、前記通電操作量の変化の位相を進める位相進み補償を開始し、前記微分値が大きいときほどより長く設定される時間が経過した時点で前記位相進み補償を終了させる補正手段と、を含んで構成される。
【0010】
かかる構成によると、前記ソレノイドの電気的制御量(例えば電流)の目標値に実際の値が一致するようにフィードバック制御されるが、ソレノイドの可動部分が動く状態であると目標値の変化における微分値に基づいて判定されたときには、前記微分値が大きいときほどより長く設定される時間だけ通電操作量の変化の位相を進める位相進み補償を施して、応答遅れの補償を図る。
【0011】
【発明の効果】
請求項1記載の発明によると、ソレノイドの電気的制御量を目標値にフィードバックして、定常的な目標値に対する偏差を吸収しつつ、ソレノイドの可動部分が動くことでソレノイドの電気的特性(インダクタンス等)が過渡的に変化し、電流変化の応答遅れが発生するときには、通電操作量のフィードホワード補正によって前記応答遅れに対する補償を行えるという効果がある。
【0012】
請求項2記載の発明によると、ソレノイドの電気的制御量を目標値にフィードバックして、定常的な目標値に対する偏差を吸収しつつ、ソレノイドの可動部分が動くことでソレノイドの電気的特性(インダクタンス等)が過渡的に変化し、電流変化の応答遅れが発生するときには、通電操作量の位相進み処理によって前記応答遅れに対する補償を行えるという効果がある。
【0013】
【発明の実施の形態】
以下に本発明の実施の形態を説明する。
図1は、実施の形態におけるソレノイド駆動装置を示す制御ブロック図であり、図に示すソレノイド1は、例えば車両用の油圧式自動変速機に備えられて作動油圧を制御するものである。
【0014】
ここで、前記ソレノイド1の電流(電気的制御量)を制御することで、油圧経路に介装される可動部分としてのプランジャが変位して油圧経路の面積が変化し、以て、油圧が調整される構成となっており、前記電流は、図示しないソレノイド駆動回路に出力されるデューティ制御信号(通電操作量)によって制御される。
【0015】
ソレノイド1の通電制御においては、まず、目標電流が目標電流演算部(目標値演算手段)2で演算され、この目標電流に相当する基準デューティ(中央値)が中央値設定部3で設定される一方、前記ソレノイド1に実際に流れる電流iを図示しない電流検出回路(電気的制御量検出手段)で検出して、前記目標電流との偏差を求め、該偏差に基づきフィードバック補正部4ではPID制御動作によってフィードバック補正分を設定する(フィードバック制御手段)。そして、前記基本デューティ(中央値)と前記フィードバック補正分とを加算して得られるデューティを、前記ソレノイド1(ソレノイド駆動回路)に出力する。
【0016】
尚、検出されたソレノイド1の実際の電流iは、ローパスフィルタ5を介した後、前記制御偏差の演算に用いるようにしてある。
上記構成により、ソレノイドの抵抗,温度,電源電圧のばらつきがあっても、定常的には目標電流に精度良く制御できることになる。
更に、本実施の形態における駆動装置においては、前記フィードバック制御されるデューティ(通電操作量)に対して、フィードホワード補正分を加算するフィードホワード制御系(補正手段)が設けられている。
【0017】
前記フィードホワード制御系は、フィードホワード補正量を演算する補正量演算部6と、該補正量演算部6で演算されたフィードホワード補正量を、上記フィードバック制御系で設定されるデューティに加算するか否かを切り換える切り換え手段7と、前記ソレノイド1の可動部(プランジャ)の状態に応じて前記切り換え手段7を制御する可動部状態演算部8とからなる。
【0018】
前記補正量演算部6では、前記目標電流演算部2で演算された目標電流の微分値に応じてフィードホワード補正量を決定する。
一方、前記可動部状態演算部8は、図2に示すような構成によって、前記切り換え手段7を制御してフィードホワード補正分の加算を行わせる。
まず、前記目標電流演算部2で演算された目標電流の微分値を演算し、該微分値が所定値以上であるか否かを判断する。そして、前記微分値が所定値以上であるときには、前記ソレノイド1の可動部(プランジャ)が動く状態であると判断し、前記切り換え手段7を切り換えて、前記補正量演算部6で演算されるフィードホワード補正量の加算を開始させる。
【0019】
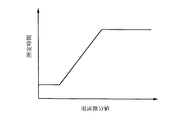
上記のように目標電流の微分値に基づいて開始された前記フィードホワード補正量の加算補正は、図3に示すように、前記目標電流の微分値に応じた時間が経過した時点で終了させる。
【0020】
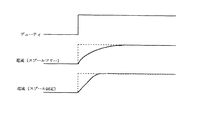
上記構成によれば、図4に示すように、目標電流がステップ変化してソレノイド1の可動部(プランジャ)が動くときに、フィードホワード補正量が付加されるので、可動部(プランジャ)が動くことでソレノイドのインダクタスが過渡的に変化しても、これに対応して応答良く目標電流にまで変化させることができ、以って、油圧を応答良く変化させることができる。
【0021】
ところで、上記図1に示した実施の形態では、ソレノイド1の可動部(プランジャ)が動くときに、フィードホワード補正量を付加する構成としたが、図5に示すように、可動部状態演算部8における演算結果に応じて、通電操作量としてのデューティに1次位相進み処理を施す1次進み補償(位相進み処理)10を、ソレノイド1の直前に入れるか否かを切り換える構成とすることで同様な効果を得ることができる。
【0022】
即ち、可動部状態演算部8において、目標電流の微分値や油圧の応答モデルに基づいてソレノイドの可動部が動く状態であると判定されたときには、切り換え手段7の切り換えによって1次進み補償10を入れるようにし、前記微分値に応じた時間が経過した時点で、前記1次進み補償10を制御回路から除くように切り換え手段7を制御する(補正手段)。
【0023】
ここで、第1の実施の形態におけるフィードバック補正量の演算に相当するものとして、前記1次進み補償10における係数Kを、目標電流の微分値に応じて変更すると良い。
尚、目標電流の微分値に加え、ソレノイドに流れると予測される電流を加味して、フィードホワード補正量,位相進み係数Kの設定、及び、補正期間の判断を行わせるようにしても良い。
【0024】
また、ソレノイドを自動変速機における油圧制御に用いるものに限定するものではなく、例えば空気圧制御用のソレノイドについて上記同様に駆動制御する構成としても良い。
【図面の簡単な説明】
【図1】第1の実施の形態を示す制御ブロック図。
【図2】目標電流の微分値に基づく補正開始制御の様子を示すブロック図。
【図3】目標電流の微分値に基づく補正時間の特性を示す線図。
【図4】第1の実施の形態における制御特性を示すタイムチャート。
【図5】第2の実施の形態を示す制御ブロック図。
【図6】ソレノイドの可動部分の動きによる電流応答の違いを示すタイムチャート。
【符号の説明】
1…ソレノイド
2…目標電流演算部
3…中央値設定部
4…フィードバック補正部
5…ローパスフィルタ
6…補正量演算部
7…切り換え手段
8…可動部状態演算部
10…1次進み補償
Claims (2)
- ソレノイドの電気的制御量の目標値を演算する目標値演算手段と、
前記電気的制御量の実際値を検出する電気的制御量検出手段と、
前記目標値演算手段で演算された目標値に前記電気的制御量検出手段で検出される実際値が一致するように前記ソレノイドに対する通電操作量をフィードバック制御するフィードバック制御手段と、
前記目標値の変化における微分値が所定値以上である状態を前記ソレノイドの可動部分が動く状態として判定し、前記微分値が所定値以上であると判定されたときに、前記通電操作量へのフィードホワード分の付加を開始し、前記微分値が大きいときほどより長く設定される時間が経過した時点で前記フィードホワード分の付加を終了させる補正手段と、
を含んで構成されたことを特徴とするソレノイド駆動装置。 - ソレノイドの電気的制御量の目標値を演算する目標値演算手段と、
前記電気的制御量の実際値を検出する電気的制御量検出手段と、
前記目標値演算手段で演算された目標値に前記電気的制御量検出手段で検出される実際値が一致するように前記ソレノイドに対する通電操作量をフィードバック制御するフィードバック制御手段と、
前記目標値の変化における微分値が所定値以上である状態を前記ソレノイドの可動部分が動く状態として判定し、前記微分値が所定値以上であると判定されたときに、前記通電操作量の変化の位相を進める位相進み補償を開始し、前記微分値が大きいときほどより長く設定される時間が経過した時点で前記位相進み補償を終了させる補正手段と、
を含んで構成されたことを特徴とするソレノイド駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19104097A JP3632096B2 (ja) | 1997-07-16 | 1997-07-16 | ソレノイド駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19104097A JP3632096B2 (ja) | 1997-07-16 | 1997-07-16 | ソレノイド駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1140416A JPH1140416A (ja) | 1999-02-12 |
| JP3632096B2 true JP3632096B2 (ja) | 2005-03-23 |
Family
ID=16267895
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP19104097A Expired - Fee Related JP3632096B2 (ja) | 1997-07-16 | 1997-07-16 | ソレノイド駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3632096B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100507485B1 (ko) | 2003-05-27 | 2005-08-17 | 현대자동차주식회사 | 자동 변속기의 솔레노이드 플런저 보정 제어장치 및 방법 |
| JP2006170259A (ja) * | 2004-12-14 | 2006-06-29 | Hitachi Ltd | ソレノイドの制御装置 |
| JP5589531B2 (ja) * | 2010-04-23 | 2014-09-17 | トヨタ自動車株式会社 | 車両用油圧制御装置 |
| JP5282771B2 (ja) * | 2010-07-29 | 2013-09-04 | トヨタ自動車株式会社 | 自動変速機の油圧制御装置 |
| CN104516281B (zh) * | 2013-09-30 | 2018-03-02 | 北京中电科电子装备有限公司 | 一种螺线管驱动器 |
| JP7268456B2 (ja) * | 2019-04-11 | 2023-05-08 | 株式会社デンソー | 自動変速機制御装置 |
-
1997
- 1997-07-16 JP JP19104097A patent/JP3632096B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1140416A (ja) | 1999-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5281902A (en) | Voltage compensation of a pulse-width-modulated servomechanism | |
| JP3632096B2 (ja) | ソレノイド駆動装置 | |
| US7583069B2 (en) | Booster | |
| JP2009014118A (ja) | 変速機用制御装置 | |
| US7276869B2 (en) | Motor controller and motor controlling method | |
| JPH04276156A (ja) | 可変量を検出する方法及び装置 | |
| EP1014247A2 (en) | Hydraulic control apparatus and control method for automobile | |
| US6593719B2 (en) | Disturbance compensation control system | |
| JPH1165676A (ja) | サーボモータによる加圧制御方法及び装置 | |
| JPH11117795A (ja) | 負荷の制御のための方法及び装置 | |
| CN101496275B (zh) | 驱动装置和方法 | |
| JP5153337B2 (ja) | 熱エンジンを有する自動車の駆動組立体の制御方法 | |
| JPS60228746A (ja) | 燃料噴射量制御装置 | |
| JPH0610765B2 (ja) | プロセス制御装置 | |
| JPS6146330A (ja) | プツシユの圧入方法 | |
| JP4127039B2 (ja) | フィードバック制御装置 | |
| JP7814061B2 (ja) | 溶接電源装置 | |
| JP3901082B2 (ja) | A/d変換器制御装置 | |
| JP6344070B2 (ja) | ソレノイド制御装置 | |
| JP2515273B2 (ja) | 短絡移行ア−ク溶接方法及びその装置 | |
| JPH10105247A (ja) | サーボモータのオーバーシュート防止方法 | |
| JP3079200B2 (ja) | パチンコ機の玉発射駆動制御装置 | |
| JP3334356B2 (ja) | 自動温度制御装置 | |
| JP2013240176A (ja) | デジタル制御電源装置 | |
| JPH06270222A (ja) | 成形機の温度フィードバック制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040727 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041203 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20041216 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080107 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090107 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |