JP3662369B2 - ポンプ装置 - Google Patents
ポンプ装置 Download PDFInfo
- Publication number
- JP3662369B2 JP3662369B2 JP28548596A JP28548596A JP3662369B2 JP 3662369 B2 JP3662369 B2 JP 3662369B2 JP 28548596 A JP28548596 A JP 28548596A JP 28548596 A JP28548596 A JP 28548596A JP 3662369 B2 JP3662369 B2 JP 3662369B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- hydraulic pressure
- target
- setting
- pump
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Control Of Positive-Displacement Pumps (AREA)
- Nozzles (AREA)
- Cleaning By Liquid Or Steam (AREA)
Description
【発明の属する技術分野】
本発明は、ポンプの発生液圧を、液圧アクチュエータまたはノズルなどの負荷物体に作用させて前記液圧アクチュエータの作動によりパイプの矯正を行ったり、又は前記ノズルからの噴射により被洗浄物の洗浄等を行ったりするためのポンプ装置に関する。
【0002】
【従来の技術】
一般に、液圧を発生させるポンプ装置は、図7に示す如く電動モータ1が駆動するポンプ2の吐出通路3内液圧を制御する液圧制御弁6を備え、前記ポンプ2の吐出通路3に接続される一本、又は複数本のノズル4から加圧液を放出して洗浄等を行う如く構成されている。このように吐出通路3に複数本のノズル4を接続する場合、各ノズル4から同液圧及び同流量で放出させることができる容量のポンプ2及び該ポンプ2を駆動する電動モータ1が使用され、これらポンプ2及び電動モータ1を一定の回転速度で駆動することにより、各ノズル4から同液圧及び同流量の加圧液を放出し、また、前記各ノズル4からの放出時、少なくとも一本のノズル4が閉鎖されて、前記吐出通路3内の液圧が上昇すると、即ち、負荷が増大すると、この負荷に見合う流量の加圧液が、前記液圧制御弁6の余水口から余水路に排出され、前記吐出通路3内の液圧が一定に保たれるようになっている。
【0003】
また、実用新案登録第2506442号公報に記載され、図8に示しているように、前記吐出通路3内液圧を検出する液圧センサ9と、前記吐出通路3内の目標液圧を設定する液圧設定器60と、電動モータ1の駆動速度を制御する速度制御器61と、前記液圧センサ9からの液圧検出信号と液圧設定器60からの液圧設定信号とを比較して液圧検出信号が液圧設定信号と常時等しくなるように速度制御器61に制御信号を出力するコントローラ62とを備えたポンプ装置が知られている。このポンプ装置は、ポンプ2を駆動したときの吐出通路3内が目標液圧となるように、予め液圧設定器60により目標液圧を設定する。そして、吐出通路3に接続された複数本のノズル4の全てが開放された状態でポンプ2が駆動された場合、吐出通路3内の液圧が、前記液圧設定器60により設定された目標液圧と同液圧となり、各ノズル4から目標液圧の加圧液を放出できる。また、前記ノズル4の全てを開放した状態から、一本又は複数本のノズル4を閉鎖すると、吐出通路3内の液圧が前記目標液圧よりも高くなって、コントローラ62から速度制御器61に、電動モータ1の駆動速度を下げるように制御信号が出力され、電動モータ1の駆動速度が、前記吐出通路3内液圧が前記目標液圧と同圧になるまで下がり、ポンプ2から吐出される加圧液の流量も、その開放されたノズルから放出される総流量に見合う流量となる。
【0004】
【発明が解決しようとする課題】
ところが、以上の如く構成された従来のポンプ装置は、何れも目標液圧を設定するに過ぎず、該目標液圧に至る間の液圧は何ら設定されていないから、液圧アクチュエータ等の負荷物体に負荷が作用している状態でポンプ2が駆動された場合には、図9のaに示すように、時間経過を殆ど伴わずに目標液圧P1になるまで急激に加圧されることになり、また、負荷物体に負荷が作用していない状態でポンプ2が駆動された場合には、負荷物体に負荷が作用するまでの間は、図9のbの如く時間経過に伴って液圧が緩やかに上昇することになるが、この場合においても、負荷物体に負荷が作用した時点cから時間経過を殆ど伴わずに目標液圧P1になるまで急激に加圧(d) されることになり、負荷物体には急激に目標液圧が作用する。従って、例えば目標液圧が700kgf /cm2 程度の高圧に設定され、液圧アクチュエータからなる複数の負荷物体を作動させて、変形した大径の丸パイプをその外周側から真円状に矯正するような場合、該負荷物体が適正移動量を越えて過剰に移動することになり、それに伴い丸パイプが矯正範囲を越えて変形したりすることになる。従って、丸パイプの矯正などの作業が行い難いという問題がある。また、前記負荷物体が液圧アクチュエータである場合、該液圧アクチュエータの反ピストン室に加圧液が供給されて、ピストンが前進移動した後、前記吐出通路の中途に介在される切換弁が切換えられて、加圧液が液圧アクチュエータのピストン室に供給された場合には、ピストンが急激に後退移動することになる不具合もあった。
【0005】
本発明は、上述のような事情に鑑みてなされたものであり、ポンプの吐出通路内液圧を目標液圧に設定することができて、しかも、該目標液圧が時間経過を伴わずに負荷物体に急激に作用するのを防止することができるポンプ装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明の第1発明に係るポンプ装置は、電動モータが駆動するポンプを備え、該ポンプの吐出通路内液圧が高圧目標液圧に設定され、該高圧目標液圧が、前記吐出通路に接続される負荷物体に作用されるように構成されたポンプ装置において、前記高圧目標液圧より低い中途目標液圧を設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的加圧を行って前記高圧目標液圧を得るべくなしたことを特徴とする。
【0007】
第1発明にあっては、高圧目標液圧より低い中途目標液圧を設定する手段による設定、及び所定時間毎に中途目標液圧の達成を確認する手段による確認の反復により、段階的加圧を行って高圧目標液圧を得るため、負荷に拘らず徐々に加圧できるのである。従って、負荷物体が液圧アクチュエータである場合、該液圧アクチュエータを徐々に移動させることができる。
【0008】
本発明の第2発明に係るポンプ装置は、高圧目標液圧から低圧目標液圧に減圧するに際し、前記高圧目標液圧より低い中途目標液圧を設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的減圧を行って前記低圧目標液圧を得るべくなしていることを特徴とする。
【0009】
第2発明にあっては、高圧目標液圧より低い中途目標液圧を設定する手段による設定、及び所定時間毎に中途目標液圧の達成を確認する手段による確認の反復により、段階的減圧を行って低圧目標液圧を得るため、負荷に拘らず徐々に減圧できるのである。従って、負荷物体が液圧アクチュエータである場合、該液圧アクチュエータを徐々に移動させることができる。
【0010】
本発明の第3発明に係るポンプ装置は、電動モータが駆動するポンプを備え、該ポンプの吐出通路内液圧が高圧目標液圧に設定され、該高圧目標液圧が、前記吐出通路に接続される負荷物体に作用されるように構成されたポンプ装置において、前記高圧目標液圧より低い中途目標液圧を手動により設定する液圧設定手段と、所定時間毎に前記中途目標液圧の達成を確認する手段と、前記液圧設定手段により設定した設定値を記憶する記憶部とを備え、前記液圧設定手段及び確認手段による設定及び確認の反復により、段階的加圧を行って前記高圧目標液圧を得るべくなしたことを特徴とする。
【0011】
第3発明にあっては、負荷物体の負荷に対する作動状況を見ながら高圧目標液圧に至る所定時間毎の液圧に従って中途目標液圧を手動により設定することができ、さらにこの液圧設定手段により設定した設定値は記憶部により記憶することができるので、繰り返し同様の作業を行う場合、その都度手動による液圧設定をすることなく、負荷に最適な加圧が行えるのである。
本発明の第4発明に係るポンプ装置は、高圧目標液圧から低圧目標液圧に減圧するに際し、前記高圧目標液圧より低い中途目標液圧を手動により設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的減圧を行って前記低圧目標液圧を得るべくなしていることを特徴とする。
【0012】
第4発明にあっては、負荷物体の負荷に対する作動状況を見ながら低圧目標液圧に至る所定時間毎の液圧に従って中途目標液圧を手動により設定することができ、さらにこの液圧設定手段により設定した設定値は記憶部により記憶することができるので、繰り返し同様の作業を行う場合、その都度手動による液圧設定をすることなく、負荷に最適な減圧が行えるのである。
【0013】
【発明の実施の形態】
以下本発明をその実施の形態を示す図面に基づき具体的に説明する。
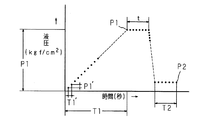
図1は本発明に係るポンプ装置の構成を示す配管系統図、図2は吐出通路内液圧と時間との関係を示すグラフである。
図1において、1はインバータにより駆動される三相誘導の電動モータ、2は該モータ1の駆動に連動する往復動型ポンプ、3は該ポンプ2の吐出通路であり、該吐出通路3の先端が、複数個(図1では8個)の液圧アクチュエータ40からなる負荷物体4のピストン側室に連通している。この吐出通路3の中途には、吐出通路3内液圧を表示する液圧表示計5と、吐出通路3内液圧を制御する手動式の液圧制御弁6と、ポンプ2側への戻りを阻止する逆止弁7と、吐出通路3内液圧を検出してその液圧検出信号を制御部8に出力する液圧センサ9と、エアー駆動式の第1開閉弁10とが前記ポンプ2側から夫々接続されている。
【0014】
また、吐出通路3には、前記液圧センサ9と第1開閉弁10との間から分岐し、先端が液圧アクチュエータ40の反ピストン室に連通する分岐吐出通路30と、前記第1開閉弁10に対し液圧アクチュエータ40側から分岐し、先端が液タンク11に開口する戻り通路12とが夫々接続されており、これら分岐吐出通路30及び戻り通路12の中途にはエアー駆動式の第2開閉弁13,13が夫々介装されている。さらに前記分岐吐出通路30の第2開閉弁13に対し液圧アクチュエータ40側には、先端が前記戻り通路12に連通する分岐戻り通路14が接続され、該分岐戻り通路14の中途にエアー駆動式の第1開閉弁10が介装されている。尚、図1において、15は前記戻り通路12の中途に介装して戻り液を減圧する可変絞り弁、16は前記吐出通路3における液圧表示計5とポンプ2との間から分岐され、その先端が前記戻り通路12に接続されたエアー抜き通路であり、該エアー抜き通路16の中途にエアー駆動式の第3開閉弁17が介装されている。
【0015】
前記ポンプ2を駆動する電動モータ1は、予め記憶部85に記憶したプログラムに従ってデータ処理を行う制御部8からインバータに出力される周波数指令信号により速度制御するようになされている。
【0016】
この制御部8は、図2に示すように、時間T1をかけて高圧目標液圧P1に至らしめるために適宜経過時間T1’毎に中途目標液圧P1’ずつ加圧する制御、及び同様に段階的減圧で低圧目標液圧P2へ減圧する制御を図5に示すフローチャートに従い自動的に行う。これらの制御プログラムは図3に示す記憶部81に記憶されている。制御部8はこのような自動制御を可能とするために前記液圧センサ9を接続し、出力部には、前記電動モータ1が接続されていると共に、前記各開閉弁10,13,17を作動させるための第1〜第3電磁弁18,19,20が夫々接続されている。
制御部8には液圧設定操作部VR1,VR2の出力が与えられるように接続してあり、これらによって手動設定された液圧で図6に示すフローチャートによる制御を行う。
【0017】
前記制御プログラムは、ポンプ始動時の0圧から高圧目標液圧P1となるまでの液圧と、ポンプ始動時の0時間から高圧目標液圧P1となるまでの経過時間T1とを夫々適宜間隔に細かく区切って、例えばP1及びT1を夫々100等分して、該区切り経過時間T1’の経過後に区切りした中途目標液圧P1’だけ加圧させるもので、これが繰り返されて経過時間T1に高圧目標液圧P1となす。
【0018】
中途目標液圧P1’が区切り経過時間T1’で達成されたか否かを確認し、この確認後、更に、中途目標液圧P1’だけ加圧するような処理を繰り返して徐々に目標液圧P1となるようにする。尚、前記液圧P1と時間T1とは多数のパターンを予め設定し、負荷物体の対象に応じて適宜のパターンを随時選択できるようにしている。
【0019】
また、制御部8による減圧制御は、前記吐出通路3内の液圧を高圧目標液圧P1に加圧した後、低圧目標液圧P2に減圧させるもので、前記加圧制御と同様に、低圧目標液圧P2に至る適宜経過時間T1’毎に中途目標液圧P1’ずつ減らし、前記経過時間T1’毎に中途目標液圧P1’の減圧を確認する。
【0020】
前記液圧設定操作部VR1,VR2は、目標液圧P1及びP2に至る適宜経過時間T1’毎の中途目標液圧P1’を前記液圧アクチュエータ40の動作状況を見ながら手動により設定するものである。設定液圧は、前記記憶部81に記憶され、繰り返し同様の作業を行う場合、その都度手動による液圧設定をすることなく、最初に液圧設定操作部VR1,VR2により液圧を設定すれば、次からは自動運転により液圧設定操作部VR1,VR2で設定した設定液圧に基づいて高圧目標液圧P1に加圧及び低圧目標液圧P2に減圧することができるようにしている。
【0021】
尚、図4に示したポンプ装置は、電動モータ1及びポンプ2等の他、これらを支持する架台21と、制御盤22とを備え、該制御盤22には、電源用スイッチ23と、自動運転又は手動運転を選択するセレクトスイッチ24と、負荷物体4の液圧アクチュエータ40を前進・停止・後退させる負荷用セレクトスイッチ25と、異常時に電動モータ1を停止させる異常用スイッチ26と、自動運転スタートボタン27と、手動運転スタートボタン28と、異常時に電動モータ1を停止させた後、再び電動モータ1を駆動するための異常リセットスイッチ29と、非常時に電動モータ1を停止させる非常停止スイッチ50と、電動モータ1を手動停止させる手動運転停止スイッチ51と、高圧側・低圧側目標液圧及び経過時間などを表示する表示部52と、前記液圧設定操作部VR1,VR2とを備えている。
【0022】
次に図5,図6のフローチャート図に基づいて作動を説明する。図5において、表示盤22に設けられているセレクトスイッチ24を自動運転に選択すると、同表示盤22の表示部52に、高圧目標液圧P1と、該高圧目標液圧P1に至るまでの経過時間T1と、前記高圧目標液圧P1の持続時間tと、低圧目標液圧P2及び該低圧目標液圧P2の持続時間T2とが表示され、次に自動運転スタートボタン27をオンすると、モータ回路の電磁接触器がオンして、自動運転がスタートし(S1)、吐出通路3内の液圧が液圧センサ9により検出され、その検出液圧信号に基づいて現在液圧と周波数とが前記表示部52に表示される(S2)。次に制御部8からインバータに周波数信号が出力され、該インバータにより電動モータ1が駆動され、ポンプ2が運転されると共に、第2電磁弁19が動作して二つの第2開閉弁13,13が開となり(第1開閉弁10,10は閉の状態)、分岐吐出通路30から液圧アクチュエータ40の反ピストン室に加圧液体が供給され、液圧アクチュエータ40のピストン室は、戻り通路12を介して液タンク11に開放され、液圧アクチュエータ40のピストンは前進する(S3)。
そして吐出通路3内が中途目標液圧P1’を設定し(S4)、区切り経過時間T1’が経過しているか否かを判定し(S5)、YESのときには中途目標液圧P1’に加圧されているか否かを判定し(S6)、NOのときにはT1’の経過を待つ。(S6)でP1’の加圧が達成されればS4へ戻って新たにP1’を設定して(S4)〜(S6)を繰り返して徐々に加圧する。この繰り返しによりT1時間が経過すると、高圧目標液圧P1まで加圧される(S7)。また、(S6)において中途目標液圧P1’に加圧されていないときは、圧力の上昇が異常とみなしてポンプ2の運転を止めることなくS4に戻って制御される。このように、高圧目標液圧P1に至るまでの加圧は、時間T1’毎にP1’ずつの加圧を行うから、液圧アクチュエータ40に作用している負荷の大きさに関係なく、徐々に加圧できるのである。従って、例えば高圧目標液圧が700kgf /cm2 程度の高圧に設定され、液圧アクチュエータ40からなる複数の負荷物体4を作動させて、変形した大径の丸パイプW(図4)をその外周側から真円状に矯正するような場合においても、液圧アクチュエータ40を徐々に移動させることができ、適正移動量を越えることなく容易に真円状に矯正することができるのである。尚、(S6)において異常とみなした場合、(S7)においてT1時間に高圧目標液圧P1まで加圧されていないことがあるが、この場合、(S8)において高圧目標液圧P1をt時間持続させる時間内に高圧目標液圧P1まで加圧させることができる。
【0023】
そして、高圧目標液圧P1をt時間持続させて、前記丸パイプWの矯正を終了する(S8)。然かる後、第1及び第2電磁弁18,19が作動して、二つの第1開閉弁10,10が開となり、二つの第2開閉弁13,13が閉となり、吐出通路3から液圧アクチュエータ40のピストン室に加圧液体が供給され、液圧アクチュエータ40の反ピストン室は、戻り通路14を介して液タンク11に開放されて、液圧アクチュエータ40のピストンは後退し、吐出通路3内は低圧目標液圧P2になるまで減圧され、この低圧目標液圧P2をT2時間持続させる(S9)。T1時間経過時の高圧目標液圧P1から持続時間tを経て低圧目標液圧P2のT2時間が経過するまでの減圧は、前記したように減圧手段及び液圧確認手段により、区切り時間T1’の経過後に区切り液圧P1’だけ減圧され、これが繰り返されて低圧目標液圧P2に減圧されるから、液圧アクチュエータ40のピストンを徐々に後退させることができる。次に電動モータ1及びポンプ2が停止され、制御部8から出力する出力信号により第3電磁弁20が作動し、該第3電磁弁20により第3開閉弁17が開き、吐出通路3内及び戻り通路12内のエアーが外部に排出(エアー抜き)される(S10)。そして10分間待機する(S11)。この待機後、自動運転スタートボタン27がオンされると、(S3)に戻って制御される。また、(S11)において自動運転スタートボタン27がオンされなかった場合には、前記電磁接触器がオフとなり、自動運転は終了する。
【0024】
また、表示盤22に設けられているセレクトスイッチ24を手動運転に選択して、手動運転スタートボタン28をオンすると、モータ回路の電磁接触器がオンして手動運転がスタートし(S12)、吐出通路3内の液圧が液圧センサ9により検出され、その検出液圧信号に基づいて現在液圧と周波数とが前記表示部52に表示される(S2)。次に制御部8からインバータに周波数信号が出力され、該インバータにより電動モータ1が駆動され、ポンプ2が運転される(S13)。ポンプ2の運転後、負荷用セレクトスイッチ25を前進に選択し、液圧設定手段における液圧設定操作部VR1により液圧アクチュエータ40におけるピストンの負荷に対する前進移動状況を見ながら電動モータ1及びポンプ2を運転する(S14)。このとき、液圧設定操作部VR1の調整操作により液圧設定手段による経過時間T1’と、経過時間T1’に対する加圧液圧P1’とを設定し、これを高圧目標液圧P1に至るまで繰り返すのであるから、負荷に最適な加圧が行えるのである。また、前記ポンプの運転後、負荷用セレクトスイッチ25を後退に選択し、液圧アクチュエータ40におけるピストンの負荷に対する後退移動を見ながら設定液圧にて電動モータ1及びポンプ2を運転する(S15)。このときも、液圧設定操作部VR2による経過時間T1’と、経過時間T1’に対する加圧液圧P1’とを設定し、これを低圧目標液圧P2に至るまで繰り返すのであるから、負荷に最適な減圧が行え、液圧アクチュエータ40のピストンを徐々に後退させることができる。次に手動運転停止スイッチ51をオンすると、電動モータ1及びポンプ2が停止され、制御部8から出力する出力信号により第3電磁弁20が動作され、該第3電磁弁20により第3開閉弁17が開き、吐出通路3内及び戻り通路12内のエアーが外部に排出(エアー抜き)される(S16)。そして、10分間待機した後、手動運転スタートボタン28がオンされると、(S13)に戻って制御される。また、手動運転スタートボタン28がオンされなかった場合には、電磁接触器がオフとなり、手動運転は終了する。
【0025】
以上のように手動運転した場合、液圧設定操作部VR1,VR2の操作により液圧設定手段が設定した設定液圧は、前記記憶部81に記憶され、次回からは、前記セレクトスイッチ24を自動運転に選択することにより、図5の制御が行えるのである。
【0026】
以上の実施形態では、ポンプ2の発生液圧を液圧アクチュエータ40に作用させるようにしたポンプ装置について説明したが、その他、前記負荷物体4としては、図7に示したポンプ装置のようにノズルであってもよく、その対象は特に制限されない。
【0027】
【発明の効果】
本発明の第1発明に係るポンプ装置によれば、段階的加圧を行って高圧目標液圧を得るため、負荷に拘らず徐々に加圧できるのである。従って、負荷物体が液圧アクチュエータである場合、該液圧アクチュエータを徐々に移動させることができる。
【0028】
本発明の第2発明に係るポンプ装置によれば、段階的減圧を行って低圧目標液圧を得るため、負荷に拘らず徐々に減圧できるのである。従って、負荷物体が液圧アクチュエータである場合、該液圧アクチュエータを徐々に移動させることができる。
【0029】
本発明の第3発明に係るポンプ装置によれば、負荷物体の負荷に対する作動状況を見ながら高圧目標液圧に至る所定時間毎の液圧に従って中途目標液圧を手動により設定することができ、さらにこの液圧設定手段により設定した設定値は記憶部により記憶することができるので、繰り返し同様の作業を行う場合、その都度手動による液圧設定をすることなく、負荷に最適な加圧が行えるのである。
【0030】
本発明の第4発明に係るポンプ装置によれば、負荷物体の負荷に対する作動状況を見ながら低圧目標液圧に至る所定時間毎の液圧に従って中途目標液圧を手動により設定することができ、さらにこの液圧設定手段により設定した設定値は記憶部により記憶することができるので、繰り返し同様の作業を行う場合、その都度手動による液圧設定をすることなく、負荷に最適な減圧が行えるのである。
【図面の簡単な説明】
【図1】 本発明に係るポンプ装置の構成を示す配管系統図である。
【図2】 本発明に係るポンプ装置の吐出通路内液圧と経過時間との関係を示すグラフである。
【図3】 本発明に係るポンプ装置の運転制御のブロック図である。
【図4】 本発明に係るポンプ装置の正面図である。
【図5】 本発明に係るポンプ装置の制御フローチャート図である。
【図6】 本発明に係るポンプ装置の制御フローチャート図である。
【図7】 従来のポンプ装置を示す説明図である。
【図8】 同従来のポンプ装置を示す説明図である。
【図9】 従来の吐出通路内液圧と経過時間との関係を示すグラフである。
【符号の説明】
1 電動モータ
2 ポンプ
3 吐出通路
4 負荷物体
P1 高圧目標液圧
P2 低圧目標液圧
81 記憶部
Claims (4)
- 電動モータが駆動するポンプを備え、該ポンプの吐出通路内液圧が高圧目標液圧に設定され、該高圧目標液圧が、前記吐出通路に接続される負荷物体に作用されるように構成されたポンプ装置において、前記高圧目標液圧より低い中途目標液圧を設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的加圧を行って前記高圧目標液圧を得るべくなしたことを特徴とするポンプ装置。
- 高圧目標液圧から低圧目標液圧に減圧するに際し、前記高圧目標液圧より低い中途目標液圧を設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的減圧を行って前記低圧目標液圧を得るべくなしている請求項1記載のポンプ装置。
- 電動モータが駆動するポンプを備え、該ポンプの吐出通路内液圧が高圧目標液圧に設定され、該高圧目標液圧が、前記吐出通路に接続される負荷物体に作用されるように構成されたポンプ装置において、前記高圧目標液圧より低い中途目標液圧を手動により設定する液圧設定手段と、所定時間毎に前記中途目標液圧の達成を確認する手段と、前記液圧設定手段により設定した設定値を記憶する記憶部とを備え、前記液圧設定手段及び確認手段による設定及び確認の反復により、段階的加圧を行って前記高圧目標液圧を得るべくなしたことを特徴とするポンプ装置。
- 高圧目標液圧から低圧目標液圧に減圧するに際し、前記高圧目標液圧より低い中途目標液圧を手動により設定する手段と、所定時間毎に前記中途目標液圧の達成を確認する手段とを備え、これらの手段による設定及び確認の反復により、段階的減圧を行って前記低圧目標液圧を得るべくなしている請求項3記載のポンプ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP28548596A JP3662369B2 (ja) | 1996-10-28 | 1996-10-28 | ポンプ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP28548596A JP3662369B2 (ja) | 1996-10-28 | 1996-10-28 | ポンプ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10131868A JPH10131868A (ja) | 1998-05-19 |
| JP3662369B2 true JP3662369B2 (ja) | 2005-06-22 |
Family
ID=17692137
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP28548596A Expired - Fee Related JP3662369B2 (ja) | 1996-10-28 | 1996-10-28 | ポンプ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3662369B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5537527A (en) * | 1978-09-08 | 1980-03-15 | Ebara Corp | Control method for pump speed |
| JPS5587879A (en) * | 1978-12-26 | 1980-07-03 | Ebara Corp | Accelerating method for pump |
| JP3010591U (ja) * | 1994-10-26 | 1995-05-02 | 日本機械工業株式会社 | ポンプ車用放水銃の吐水圧力自動制御装置 |
| JP2541530Y2 (ja) * | 1995-10-20 | 1997-07-16 | 株式会社荏原製作所 | 自動給水装置のポンプ制御装置 |
-
1996
- 1996-10-28 JP JP28548596A patent/JP3662369B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10131868A (ja) | 1998-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US3957395A (en) | Method and apparatus for controlling a pump | |
| EP2289437B1 (en) | Fluid ejection device and method of controlling fluid ejection device | |
| US9155455B2 (en) | Endoscope gas delivery system | |
| US20080128006A1 (en) | Method for controlling a cleaner and cleaner for performing the method | |
| JPS6357058A (ja) | 血液ポンプの駆動装置 | |
| US20230001653A1 (en) | Flat tire repair device | |
| JP3662369B2 (ja) | ポンプ装置 | |
| JPH10328296A (ja) | 大動脈バルーンポンプのオーバードライブ装置および方法 | |
| US9067576B2 (en) | Hydraulic powered park brake system | |
| JP2844476B2 (ja) | 油圧アクチュエータの制御方法 | |
| JP2004308736A (ja) | 液圧装置及びその制御方法 | |
| CN110960890A (zh) | 一种可调节真空度的真空脱泡系统及脱泡方法 | |
| CN118896095A (zh) | 电控液压系统、泄压控制方法和工程机械 | |
| JP2005235593A (ja) | 燃料ガス供給装置 | |
| GB2447084A (en) | Power-washing equipment and method | |
| JP5193721B2 (ja) | 高圧洗浄車 | |
| CN118140050A (zh) | 液体喷射装置 | |
| EP4623886A1 (en) | Soft-start control method and soft-start control device | |
| JP4757211B2 (ja) | 高圧洗浄車および高圧洗浄車のエア流路切換方法 | |
| JPH09314391A (ja) | 冷間等方圧加圧装置の減圧方法及び装置 | |
| JP3319899B2 (ja) | 冷間静水圧加圧装置における減圧方法及び装置 | |
| JP3357521B2 (ja) | 基板洗浄装置 | |
| US11022151B2 (en) | Hydraulic device and control method of hydraulic device | |
| JP3286070B2 (ja) | 射出成形機 | |
| JP2020110361A (ja) | 酸素ルーム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040720 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040916 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050323 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140401 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |