JP3674467B2 - 振動ジャイロ及びそれを用いた電子装置 - Google Patents
振動ジャイロ及びそれを用いた電子装置 Download PDFInfo
- Publication number
- JP3674467B2 JP3674467B2 JP2000192950A JP2000192950A JP3674467B2 JP 3674467 B2 JP3674467 B2 JP 3674467B2 JP 2000192950 A JP2000192950 A JP 2000192950A JP 2000192950 A JP2000192950 A JP 2000192950A JP 3674467 B2 JP3674467 B2 JP 3674467B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- signal
- detection
- input
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 119
- 230000005856 abnormality Effects 0.000 claims description 55
- 238000003745 diagnosis Methods 0.000 claims description 4
- 238000005452 bending Methods 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 claims description 3
- 238000009499 grossing Methods 0.000 description 32
- 238000010586 diagram Methods 0.000 description 24
- 230000002159 abnormal effect Effects 0.000 description 13
- 230000003321 amplification Effects 0.000 description 10
- 238000003199 nucleic acid amplification method Methods 0.000 description 10
- 239000000758 substrate Substances 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000004092 self-diagnosis Methods 0.000 description 4
- 230000002950 deficient Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5649—Signal processing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Gyroscopes (AREA)
Description
【発明の属する技術分野】
本発明は、振動ジャイロ及びそれを用いた電子装置、特に、手ぶれ防止機能付きビデオカメラ、カーナビゲーションシステム、ポインティングデバイスなどに用いられる振動ジャイロ及びそれを用いた電子装置に関する。
【0002】
【従来の技術】
図13に従来の振動ジャイロのブロック図を示す。13図に示した振動ジャイロの基本的な考え方は、特開平4−215017号公報に開示されている。
【0003】
図13において、振動ジャイロ50は、振動子100と、検出回路200と、駆動回路300と、信号処理回路400と、診断回路700とを有する。
【0004】
振動子100は、一方主面に第一の検出電極104と第二の検出電極105とが形成されるとともに、厚み方向に分極された第一の圧電体基板101と、一方主面に駆動電極106が形成されるとともに、厚み方向に分極された第二の圧電体基板102とを有している。第一の圧電体基板101の他方主面と第二の圧電体基板102の他方主面とは、中間電極103を介して貼り合わされている。検出回路200は、第一のチャージアンプ220と第二のチャージアンプ221と差動回路210とを有する。駆動回路300は、加算回路310とAGC回路320と位相補正回路330とを有する。信号処理回路400は、検波回路410と平滑回路420と増幅回路430とを有する。
【0005】
このように構成された振動ジャイロ50において、振動子100の第一の検出電極104は第一のチャージアンプ220に接続され、第二の検出電極105は第二のチャージアンプ221に接続されている。第一のチャージアンプ220、第二のチャージアンプ221は、加算回路310と差動回路210とにそれぞれ接続されている。加算回路310はAGC回路320に接続され、AGC回路320は位相補正回路330に接続され、位相補正回路330は駆動電極106と検波回路410と診断回路700とに接続されている。そして、差動回路210は検波回路410と診断回路700とに接続され、検波回路410は平滑回路420に接続され、平滑回路420は増幅回路430に接続されている。
【0006】
このような構成の振動ジャイロ50は、駆動電極106に駆動電圧を印加することにより、振動子100が厚み方向に、長手方向両端自由たわみ振動をする。そして、振動子100に、長手方向を軸とする角速度が与えられた場合には、コリオリ力により幅方向に屈曲変位が発生するため、第一の検出電極104及び第二の検出電極105には駆動電圧による同位相の信号に加えてコリオリ力に応じた互いに位相の異なる電荷が発生する。
【0007】
そして、第一のチャージアンプ220は第一の検出電極104の発生電荷を電圧に変換して差動回路210と加算回路310とに入力し、第二のチャージアンプ221は第二の検出電極105の発生電荷を電圧に変換して差動回路210と加算回路310とに入力する。加算回路310は、入力された信号を加算することによって、信号からコリオリ力の影響を取り除いてAGC回路320に出力する。AGC回路320は、入力された信号の振幅が一定となるように増幅して、位相補正回路330に入力し、位相補正回路330は入力された信号の位相を補正して駆動電圧を駆動電極106と検波回路410とに入力する。
【0008】
一方、差動回路210は、入力された信号を減算することによって、信号から駆動信号に対応する信号を取り除いて、コリオリ力に対応する信号を検波回路410に入力する。検波回路410は差動回路210から入力された信号を、駆動電圧に同期して検波し、平滑回路420に入力する。平滑回路420は入力された信号を平滑して増幅回路430に入力し、増幅回路430は入力された信号を直流増幅して角速度に対応する信号を外部に出力する。
【0009】
そして、振動ジャイロ50においては、検出回路200と駆動回路300が自己診断回路700に接続されているため、検出回路200及び駆動回路300が正常であるか、少なくとも検出回路200及び駆動回路300の一方が異常であるかを診断することができる。
【0010】
【発明が解決しようとする課題】
従来の振動ジャイロ50は、検出回路200及び駆動回路300に接続された自己診断回路700を有しているため、検出回路200及び駆動回路300の異常の有無を診断することができる。
【0011】
また、同時に、差動回路210及び位相補正回路330の異常として現われる現象、例えば、振動子100の第一の検出電極104及び第二の検出電極105及び駆動電極106に、破損、劣化、配線不良が生じていないか、駆動回路300に供給される電源ラインが切断されていないかということも診断することができる。
【0012】
しかし、従来の振動ジャイロ50は、異常を起こし得る回路要素の一部しか診断していないため、振動ジャイロの異常を完全に診断できているとは言い難い。自動車関連技術などにおいては、種々の製品が互いに影響与えながら複雑なシステムを構成しており、一つの製品の僅かな異常がシステム全体としては致命的な損害になる。したがって、回路の一部の異常だけでなく電源を含めた全ての回路要素について、異常の有無を確実に診断することが求められる。
【0013】
ところが、従来の振動ジャイロ50は、自己診断回路700が信号処理回路400に接続されていないので、信号処理回路400の異常を診断できない。したがって、信号処理回路400の異常により誤った角速度が出力された場合であっても、誤った角速度が出力されたことに気づかないという問題がある。また、振動ジャイロ50は、電源の異常を診断していないので、差動回路210及び位相補正回路330の異常として現われない現象、例えば、電源の電圧値の変動や、ノイズ、瞬時の停止等の異常により誤った角速度が出力された場合であっても、誤った角速度が出力されたことに気づかないという問題がある。
【0014】
そこで、本発明は、回路要素の一部に異常が生じた場合であっても、確実に異常を診断できる振動ジャイロを提供することを目的とする。
【0015】
また、本発明は、電源に異常があった場合でも、確実に異常を診断できる振動ジャイロを提供することを目的とする。
【0016】
また、本発明は、異常を確実に診断できる振動ジャイロを用いた安全なシステムを有する電子装置を提供することを目的とする。
【0017】
【課題を解決するための手段】
上記目的を達成するために、本発明の振動ジャイロは、駆動電極と検出電極とを有する振動子と、前記駆動電極に駆動電圧を印加する駆動回路と、前記検出電極から前記振動子の屈曲変位に対応する信号が入力される検出回路と、前記検出回路から入力された信号を処理して角速度を検出する信号処理回路と、前記検出回路、及び、前記駆動回路、及び、前記信号処理回路、及び、電源回路の全てが正常であるか否かを診断する診断回路とを有する、ことを特徴とする。
【0018】
また、本発明の振動ジャイロは、前記信号処理回路が、切替手段と検波回路とを有し、前記切替手段は、前記検出回路から入力された信号、及び、前記駆動回路から入力された信号のいずれか一方を前記検波回路に出力し、前記検波回路は、前記切替手段から入力された信号を前記駆動電圧に同期して検波し、前記信号処理回路は、前記切替手段を介して前記検出回路から信号が入力されるときは角速度を検出し、前記切替手段を介して前記駆動回路から信号が入力されるときは前記信号処理回路の異常の有無に対応する信号を出力する、ことを特徴とする。
【0019】
また、本発明の振動ジャイロは、前記診断回路が、入力された電源電圧を基準電圧と比較して、前記電源電圧が所定の範囲内にあるか否かを判定する判定手段を有する、ことを特徴とする。
【0020】
また、本発明の振動ジャイロは、前記診断回路が、前記検出回路から入力された信号を整流する第一の整流回路と、前記駆動回路から入力された信号を整流する第二の整流回路と、前記第一の整流回路で整流された信号と、前記第二の整流回路で整流された信号とを加算する加算回路と、前記加算回路で加算された信号が所定の範囲内にあるか否かを判定する判定手段とを有する、ことを特徴とする。
【0021】
また、本発明の電子装置は、前記振動ジャイロを用いたことを特徴とする。
【0022】
このように構成することにより、本発明の振動ジャイロは、検出回路及び駆動回路及び信号処理回路及び電源回路の全てについて、異常が存在するか否かを診断しているため、回路要素の一部又は電源に異常が生じた場合であっても、確実に異常を検出できる。
【0023】
また、本発明の振動ジャイロは、検出回路出力と駆動回路出力とを加算してから異常の有無を判定するため、使用するコンパレータの数を減らすことができ、回路の簡略化を図ることができる。
【0024】
また、本発明の振動ジャイロは、切替手段を用いることにより、異常を診断する必要がある場合にだけ、異常の有無を確認できる構成であるため、回路の簡略化を図ることができる。
【0025】
また、本発明の電子装置においては、異常を確実に検出できる振動ジャイロを用いているため信頼性が要求されるシステムを構成することができる。
【0026】
【発明の実施の形態】
図1に本発明の振動ジャイロの一実施例のブロック図を示す。図1において、図13に示した従来の振動ジャイロ50と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0027】
図1において、本発明の振動ジャイロは10は、図13に示した診断回路700に代えて診断回路600を有する。そして、検出回路200の一部である差動回路210と、駆動回路300の一部である位相補正回路330と、信号処理回路400の一部である増幅回路430と、電源回路500とは、診断回路600に接続されている。
【0028】
ここで、図2に診断回路600の拡大図を示す。図2において、診断回路600は、検出判定回路610と、駆動判定回路620と、信号処理判定回路630と、電源判定回路640と総合判定回路650とを有する。
【0029】
検出判定回路610、駆動判定回路620、信号処理判定回路630は、整流回路611、621、631と平滑回路612、622、632と判定手段であるコンパレータ613、623、633とをそれぞれ有する。電源回路判定回路640は、判定手段であるコンパレータ643を有する。そして、総合判定回路650は、検出判定回路610と駆動判定回路620と信号処理判定回路630と電源判定回路640とに接続されている。
【0030】
図3を用いて、検出判定回路610の説明をする。図3には、検出回路200から出力される検出回路出力と、平滑回路612から出力される整流回路出力とを示す。なお、駆動判定回路620、信号処理判定回路630は、検出判定回路610と同様の構成であり、同様の作用効果を奏するものであるため、説明を省略する。
【0031】
検出判定回路610は、整流回路611が平滑回路612に接続され、平滑回路612がコンパレータ613に接続され、コンパレータ613が総合判定回路650に接続されている。整流回路611には、検出回路200の差動回路210から出力された検出回路出力が入力される。検出回路出力には、検出回路200の異常の有無の情報が含まれている。整流回路611は、検出回路出力を全波整流して平滑回路612に出力し、平滑回路612は入力された信号を平滑してコンパレータ613に入力する。コンパレータ613は、入力された信号が下限基準電圧以上かつ上限基準電圧以下であるときは、検出回路200に異常がない旨の判定結果を総合判定回路650に入力し、入力された信号が下限基準電圧より下又は上限基準電圧より上であるときは、検出回路200に異常がある旨の判定結果を総合判定回路650に入力する。
【0032】
なお、例えば、差動回路210の出力は、正常時には非常に小さな値であり、第二のチャージアンプ221が故障した場合などの異常時には、非常に大きな値になる。このような場合には、コンパレータ613は、下限基準電圧を使用しないで、コンパレータ613に入力される信号が上限基準電圧以下である場合に、検出回路200が正常である旨の判定結果を総合判定回路650に入力する構成にしてもよい。また、必要がない場合は、平滑回路612を省いた構成にしてもよい。
【0033】
次に、図4を用いて、電源判定回路640の説明をする。図4には、電源回路500から出力される電源回路出力を示す。図4において、A状態は、電源電圧が正常な状態、B状態は電源電圧が瞬時停止した異常な状態、C状態は電源電圧にノイズが印加された異常な状態の波形図である。
【0034】
電源判定回路640は、コンパレータ643が、総合判定回路650に接続されている。コンパレータ643には、電源回路500の異常の有無の情報が含まれている電源回路出力が入力され、入力された信号が下限基準電圧以上かつ上限基準電圧以下であるときは、電源回路500に異常がない旨の判定結果を総合判定回路650に入力し、入力された信号が下限基準電圧より下又は上限基準電圧より上であるときは、電源回路500に異常がある旨の判定結果を総合判定回路650に入力する。なお、図4に示したB状態やC状態のような非常に短期間の電源の異常は、検出回路200や駆動回路300の異常としては顕れにくいが、コンパレータ643を用いることにより確実に異常を判定できることになる。
【0035】
そして、総合判定回路650は、検出判定回路610、駆動判定回路620、信号処理判定回路630、電源判定回路640から入力された全ての信号に異常がないときは、回路要素及び電源の全てが正常である旨の診断をし、入力された信号の少なくとも一つに異常があるときは、回路要素及び電源に異常がある旨の診断をする。
【0036】
なお、検出回路出力は、差動回路210から出力される信号だけでなく、第一のチャージアンプ220又は第二のチャージアンプ221から直接出力されてもよく、駆動回路出力は、位相補正回路330から出力される信号だけでなく、加算回路310又はAGC回路320から直接出力されてもよく、信号処理回路出力は、増幅回路430から出力される信号だけでなく、検波回路410又は平滑回路420から直接出力されてもよい。
【0037】
このような構成を有する振動ジャイロ10は、全ての回路要素の異常の有無を診断しているため、回路要素の一部に異常が生じた場合であっても、確実に異常を診断できる。
【0038】
また、振動ジャイロ10は、電源判定回路を用いて電源回路を直接診断しているため、振動ジャイロの異常を確実に診断できる。
【0039】
次に、図5に本発明の振動ジャイロの診断回路の別の実施例を示す。図5において、図2に示した振動ジャイロ10の診断回路600と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0040】
図5において、振動ジャイロ10に用いられる診断回路601は、図1に示した診断回路600の検出判定回路610と駆動判定回路620とに代えて、検出駆動判定回路660を有する。検出駆動判定回路660は、整流回路661、663と、平滑回路662、664と、加算回路665と、判定手段であるコンパレータ666とを有する。そして、整流回路661は、検出回路200と平滑回路662とに接続され、整流回路663は、駆動回路300と平滑回路664とに接続され、平滑回路662、664は、加算回路665に接続され、加算回路665は、コンパレータ666に接続されている。そして、整流回路661は、検出回路出力を全波整流して平滑回路662に出力し、整流回路663は、整流回路661とは逆向きに駆動回路出力を全波整流して平滑回路664に出力する。平滑回路662、664は、入力された信号を平滑して加算回路665に出力し、加算回路665は、入力された信号を加算してコンパレータ666に出力する。コンパレータ666は、入力された信号が下限基準電圧以上かつ上限基準電圧以下であるときは、検出回路200と駆動回路300とに異常がない旨の判定結果を総合判定回路650に出力し、入力された信号が下限基準電圧より下又は上限基準電圧より上であるときは、検出回路200と駆動回路300とに異常がある旨の判定結果を総合判定回路650に出力する。
【0041】
図6に、検出駆動判定回路660の波形図を示す。図6において、D、E状態は異常がない状態、F、G、H状態は異常がある状態における波形図である。
【0042】
D状態は、角速度が与えられていない場合である。D状態においては、整流回路663には、所定の大きさの駆動回路出力が入力され、所定の大きさの信号が平滑回路664から加算回路665に入力される。整流回路661には、0Vの検出回路出力が入力され、0Vの信号が平滑回路662から加算回路665に入力される。加算回路665は、平滑回路664、662から入力された信号を加算してコンパレータ666に入力する。そして、コンパレータ666により、加算回路665から入力された信号が下限基準電圧以上かつ上限基準電圧以下であると判定される。
【0043】
E状態は、角速度が与えられた場合である。E状態においては、D状態とは異なり、整流回路661には、検出回路200からコリオリ力に応じた信号が入力され、整流回路663とは逆向きに整流され、平滑回路662で平滑されて、加算回路665に入力される。そして、コンパレータ666により、加算回路665から入力された信号が下限基準電圧以上かつ上限基準電圧以下であると判定される。
【0044】
F状態は、駆動回路出力が過大な場合である。F状態においては、整流回路663には過大な信号が入力され、平滑回路664から加算回路665に過大な信号が入力される。そして、コンパレータ666により、加算回路665から入力された信号が上限基準電圧より上であると判定される。
【0045】
G状態は、駆動回路出力が過小な場合である。G状態においては、整流回路663には過小な駆動回路出力が入力され、平滑回路664から加算回路665に過小な信号が入力される。そして、コンパレータ666により、加算回路665から入力された信号が下限基準電圧より下であると判定される。
【0046】
H状態は、検出回路出力が過大な場合である。H状態においては、整流回路661には過大な信号が入力され、平滑回路662から加算回路665に過大な信号が入力される。そして、コンパレータ666により、加算回路665から入力された信号が下限基準電圧より下であると判定される。
【0047】
このように診断回路601を有する振動ジャイロは、加算回路665を用いることにより、使用するコンパレータの数を減らすことができ、回路の簡略化を図ることができる。
【0048】
ところで、例えば、自動車の挙動制御システムに搭載される振動ジャイロにおいては、全ての回路について異常の有無を診断する必要があるが、一部の回路については特定の時間帯にだけ異常の有無を診断すれば十分である。例えば、検出回路と駆動回路とは異常の有無を常に診断する必要があるが、信号処理回路はエンジンのスタート時にのみ、異常の有無を診断すれば十分である。つまり、回路の重要度に応じた自己診断を行うことにより、回路の簡略化を図ることができる。
【0049】
次に、図7に本発明の振動ジャイロの別の実施例のブロック図を示す。図7において、図1に示した振動ジャイロ10と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0050】
図7において、振動ジャイロ20は、図1の振動ジャイロ10の信号処理回路400に代えて信号処理回路401を有する。信号処理回路401は、切替手段450を有する点のみが、信号処理回路400と異なる。切替手段450は、検出回路出力である差動回路210から入力された信号、及び、駆動回路出力である位相補正回路330から入力された信号の一方を検波回路410に入力する。検波回路410は切替手段450から入力された信号を、駆動電圧に同期して検波し、平滑回路420に出力する。平滑回路420は入力された信号を平滑して増幅回路430に入力し、増幅回路430は入力された信号を直流増幅して外部に出力する。
【0051】
図8に、振動ジャイロ20の信号処理回路401の波形図を示す。図8において、I状態は、切替手段450が差動回路210に接続された状態であり、このとき、増幅回路430からは角速度に対応する信号が出力される。J、K、L状態は、切替手段450が位相補正回路330に接続された状態であり、このとき、増幅回路430からは、信号処理回路401の異常の有無に対応する信号が診断回路600に入力される。なお、I、J状態は信号処理回路401に異常がない状態、K、L状態は信号処理回路401に異常がある状態の波形図である。
【0052】
I状態においては、差動回路210から入力された信号が切替手段450を介して検波回路410に入力され、検波回路410で検波され、平滑回路420で平滑され、増幅回路430で増幅されて、角速度に対応する信号が出力される。
【0053】
J、K、L状態においては、位相補正回路330から入力された信号が切替手段450を介して検波回路410に入力され、検波回路410で検波され、平滑回路420で平滑され、増幅回路430で増幅され、診断回路600の信号処理判定回路630で、信号処理回路401の異常の有無が判定される。例えば、J状態においては、増幅回路430から診断回路600に入力された信号が下限基準電圧以上かつ上限基準電圧以下であるので、信号処理回路401に異常がない旨の判定がされる。K状態においては、検波回路410が異常であるため検波回路出力が零Vであり、増幅回路430から診断回路600に入力された電圧が下限基準電圧より下であるので、信号処理回路401に異常がある旨の判定がされる。L状態においては、増幅回路430の増幅率が過大であるため、増幅回路430から出力された電圧が上限基準電圧より上であるので、信号処理回路401に異常がある旨の判定がされる。
【0054】
このような構成の振動ジャイロ20は、切替手段450を用いることにより、異常を診断する必要がある場合にだけ、信号処理回路401の異常の有無を診断する構成であるため、回路の簡略化を図ることができる。
【0055】
次に、図9に本発明の振動ジャイロの信号処理回路の別の実施例を示す。図9において、図7に示した振動ジャイロにおける信号処理回路と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0056】
図9において、本発明の振動ジャイロの信号処理回路402は、図7に示した信号処理回路401に加えて抵抗R1、R2を有する。抵抗R1の一端は、検出回路出力が入力される切替手段450の一方の入力端子に接続され、他端は駆動回路出力が入力される他方の入力端子に接続されている。抵抗R2の一端は切替手段450の他方の入力端子に接続され、他端は駆動回路300に接続されている。
【0057】
このような構成の信号処理回路402は、抵抗R1/抵抗R2を十分に大きくすることにより、信号処理回路401と同様の効果を奏することができる。
【0058】
次に、図10に本発明の振動ジャイロの信号処理回路の更に別の実施例を示す。図10において、図7に示した振動ジャイロ20と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0059】
図10において、信号処理回路403は、図7に示した信号処理回路401に加えて基準電圧回路460と切替手段451とを有する。基準電圧回路460は、所定の値の定電圧を出力する。そして、切替手段450は、検出回路出力、及び、基準電圧回路460から出力された信号のいずれか一方を検波回路410に入力する。また、切替手段451は、基準電圧回路460から出力された信号、及び、駆動回路出力のいずれか一方を検波回路410に入力する。そして、切替手段450から検波回路410に検出回路出力が入力されるときは、切替手段451は駆動回路出力を検波回路410に入力し、切替手段450から検波回路410に基準電圧回路460から出力された信号が入力されるときは、切替手段451は基準電圧回路460から出力された信号を検波回路410に入力する。
【0060】
このような構成の信号処理回路403は、検出回路出力が検波回路410に入力されるときは、角速度が出力される。そして、基準電圧回路460から出力された信号が検波回路410に入力されるときは、基準電圧回路460から出力された信号を用いて、基準電圧回路460から出力された信号を検波することになるため、検波回路は働かずに、基準電圧回路460から出力された信号が、平滑回路420で平滑され、増幅回路430で増幅された信号が出力される。すなわち、増幅回路430の増幅率の診断をすることができる。
【0061】
次に、図11に本発明の振動ジャイロの更に別の実施例を示す。図11において、図7に示した振動ジャイロ20と同一又は同等の部分には同じ記号を付し、説明を省略する。
【0062】
図11において、本発明の振動ジャイロ30の検出回路201は、図7に示した振動ジャイロ20の検出回路200の第一のチャージアンプ220、第二のチャージアンプ221に代えて、第一のバッファ回路230と第二のバッファ回路231と抵抗240、241とを有する点のみが異なる。
【0063】
そして、第一の検出電極104に第一のバッファ回路230と抵抗240とが接続され、第二の検出電極105に第二のバッファ回路231と抵抗241とが接続されている。そして、第一のバッファ回路230、第二のバッファ回路231は、加算回路310と差動回路210とに接続されている。ここで、第一のバッファ回路230は第一の検出電極104の電圧を加算回路310と差動回路210とに入力するためのものであり、第二のバッファ回路231は第二の検出電極105の電圧を加算回路310と差動回路210とに入力するためのものであり、抵抗240、241は、第一の検出電極104、第二の検出電極105のインピーダンスを調整するためのものである。
【0064】
このような構成の検出回路201を有する本発明の振動ジャイロ30も振動ジャイロ20と同様の作用効果を奏するものである。
【0065】
なお、本発明の振動ジャイロの実施例の説明において、振動子として2枚の圧電体基板を貼り合わせたバイモルフ型の振動子を用いて説明したが、振動子としては、円柱型、三角柱型などの音片型の振動子や、音叉型の振動子などを用いても良い。また、本発明の検出回路及び駆動回路及び信号処理回路及び診断回路は、実施例に示した構成に限られるものでないことは言うまでもない。
【0066】
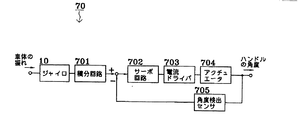
次に、図12に本発明の振動ジャイロを用いた電子装置の一実施例を示す。図12は本発明の電子装置である自動車に用いられる自動走行回路の一実施例を示すブロック図である。自動走行回路70は、本発明の振動ジャイロ10と積分回路701とサーボ回路702と電流ドライバ703とアクチュエータ704と角度検出センサ705とを有する。自動走行回路70は、振動ジャイロ10と、積分回路701と、サーボ回路702と、電流ドライバ703と、アクチュエータ704とが直列に接続され、アクチュエータ704の出力が角度検出センサ705を介してサーボ回路702に帰還されている。
【0067】
このように構成された自動走行回路70においては、自動車の車体の振れのうち、角速度信号のみが振動ジャイロ10から積分回路701に入力され、積分回路701は角速度信号を積分して車体が振れた角度に変換してサーボ回路702に出力し、サーボ回路702は、積分回路701と角度検出センサ705とから入力された角度の信号を用いて現在値と目標値との差を演算して電流ドライバ703に出力し、電流ドライバ703は入力された信号に応じた電流をアクチュエータ704に出力し、アクチュエータ704は自動車のハンドルを機械的に駆動する。そして、角度検出センサ705はハンドルが回転した角度をサーボ回路702に出力する。
【0068】
このような構成の自動走行回路70を有する本発明の電子装置は、異常を確実に検出できる振動ジャイロを用いているため、安全なシステムを構成することができ、信頼性が要求される大規模なシステムを構築することができる。
【0069】
【発明の効果】
本発明の振動ジャイロは、検出回路及び駆動回路及び信号処理回路及び診断回路及び電源の全てについて、異常が存在するか否かを診断しているため、回路要素の一部又は電源に異常が生じた場合であっても、確実に異常を検出できる。
【0070】
また、本発明の振動ジャイロは、検出回路出力と駆動回路出力とを加算してから異常の有無を判定するため、使用するコンパレータの数を減らすことができ、回路の簡略化を図ることができる。
【0071】
また、本発明の振動ジャイロは、切替手段を用いることにより、異常を診断する必要がある場合にだけ、異常の有無を確認できる構成であるため、回路の簡略化を図ることができる。
【0072】
また、本発明の電子装置は、異常を確実に検出できる振動ジャイロを用いているため信頼性が要求される大規模なシステムを構成することができる。
【図面の簡単な説明】
【図1】本発明の振動ジャイロの一実施例を示すブロック図である。
【図2】図1の振動ジャイロの診断回路のブロック図である。
【図3】図1の振動ジャイロの動作波形図である。
【図4】図1の振動ジャイロの別の動作波形図である。
【図5】図1の振動ジャイロの別の診断回路のブロック図である。
【図6】図1の振動ジャイロの更に別の動作波形図である。
【図7】本発明の振動ジャイロの別の実施例を示すブロック図である。
【図8】図7の振動ジャイロの動作波形図である。
【図9】図7の振動ジャイロの別の信号処理回路のブロック図である。
【図10】図7の振動ジャイロの更に別の信号処理回路のブロック図である。
【図11】本発明の振動ジャイロの更に別の実施例を示すブロック図である。
【図12】本発明の電子装置に用いられる自動走行回路の一実施例を示すブロック図である。
【図13】従来の振動ジャイロを示すブロック図である。
【符号の説明】
10、20、30…振動ジャイロ
200、201…検出回路
300…駆動回路
400、401、402、403…信号処理回路
500…電源回路
600、601…診断回路
70…自動走行回路
Claims (5)
- 駆動電極と検出電極とを有する振動子と、
前記駆動電極に駆動電圧を印加する駆動回路と、
前記検出電極から前記振動子の屈曲変位に対応する信号が入力される検出回路と、
前記検出回路から入力された信号を処理して角速度を検出する信号処理回路と、
前記検出回路、及び、前記駆動回路、及び、前記信号処理回路、及び、電源回路の全てが正常であるか否かを診断する診断回路とを有することを特徴とする、振動ジャイロ。 - 前記信号処理回路は、切替手段と検波回路とを有し、
前記切替手段は、前記検出回路から入力された信号、及び、前記駆動回路から入力された信号のいずれか一方を前記検波回路に出力し、
前記検波回路は、前記切替手段から入力された信号を前記駆動電圧に同期して検波し、
前記信号処理回路は、前記切替手段を介して前記検出回路から信号が入力されるときは角速度を検出し、前記切替手段を介して前記駆動回路から信号が入力されるときは前記信号処理回路の異常の有無に対応する信号を出力することを特徴とする、請求項1に記載の振動ジャイロ。 - 前記診断回路は、入力された電源電圧を基準電圧と比較して、前記電源電圧が所定の範囲内にあるか否かを判定する判定手段を有することを特徴とする、請求項1又は2に記載の振動ジャイロ。
- 前記診断回路は、前記検出回路から入力された信号を整流する第一の整流回路と、
前記駆動回路から入力された信号を整流する第二の整流回路と、
前記第一の整流回路で整流された信号と、前記第二の整流回路で整流された信号とを加算する加算回路と、
前記加算回路で加算された信号が所定の範囲内にあるか否かを判定する判定手段とを有することを特徴とする、請求項1乃至3のいずれかに記載の振動ジャイロ。 - 請求項1乃至4のいずれかに記載の振動ジャイロを用いたことを特徴とする電子装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000192950A JP3674467B2 (ja) | 2000-06-27 | 2000-06-27 | 振動ジャイロ及びそれを用いた電子装置 |
| US09/888,678 US6666090B2 (en) | 2000-06-27 | 2001-06-25 | Vibrating gyroscope and electronic device using the same |
| KR10-2001-0036958A KR100418061B1 (ko) | 2000-06-27 | 2001-06-27 | 진동 자이로스코프 및 그를 이용한 전자 장치 |
| EP01115527A EP1167922B1 (en) | 2000-06-27 | 2001-06-27 | Vibrating gyroscope and electronic device using the same |
| DE60128033T DE60128033T2 (de) | 2000-06-27 | 2001-06-27 | Vibrationskreisel und diesen verwendende elektronische Vorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000192950A JP3674467B2 (ja) | 2000-06-27 | 2000-06-27 | 振動ジャイロ及びそれを用いた電子装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002013930A JP2002013930A (ja) | 2002-01-18 |
| JP3674467B2 true JP3674467B2 (ja) | 2005-07-20 |
Family
ID=18692018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000192950A Expired - Fee Related JP3674467B2 (ja) | 2000-06-27 | 2000-06-27 | 振動ジャイロ及びそれを用いた電子装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6666090B2 (ja) |
| EP (1) | EP1167922B1 (ja) |
| JP (1) | JP3674467B2 (ja) |
| KR (1) | KR100418061B1 (ja) |
| DE (1) | DE60128033T2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002213961A (ja) * | 2001-01-15 | 2002-07-31 | Murata Mfg Co Ltd | 振動ジャイロおよび振動ジャイロの自己診断方法 |
| JP2002228451A (ja) * | 2001-01-29 | 2002-08-14 | Murata Mfg Co Ltd | 振動ジャイロおよび振動ジャイロの自己診断方法 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10154642C1 (de) * | 2001-11-07 | 2003-07-17 | Siemens Ag | Auswerteschaltung für einen induktiven Sensor |
| US7085333B2 (en) * | 2002-04-15 | 2006-08-01 | General Dynamics Decision Systems, Inc. | Constant-phase, gain-controlled amplification circuit |
| DE10252827B3 (de) | 2002-11-13 | 2004-08-05 | Siemens Ag | Schaltungsanordnung zur schnellen Ansteuerung insbesondere induktiver Lasten |
| US6919651B2 (en) * | 2002-11-26 | 2005-07-19 | Siemens Aktiengesellschaft | Circuit arrangement for high-speed switching of inductive loads |
| US20060282230A1 (en) * | 2003-06-30 | 2006-12-14 | Heinz-Werner Morrell | Security device for a sensor |
| JP4529444B2 (ja) * | 2004-01-13 | 2010-08-25 | パナソニック株式会社 | 角速度センサ |
| US7464590B1 (en) * | 2004-03-12 | 2008-12-16 | Thomson Licensing | Digitally programmable bandwidth for vibratory rate gyroscope |
| CN100533150C (zh) * | 2004-04-21 | 2009-08-26 | 松下电器产业株式会社 | 角速度传感器及运送设备 |
| JP4513559B2 (ja) * | 2004-12-27 | 2010-07-28 | 株式会社デンソー | センサ回路 |
| US7292021B2 (en) * | 2004-10-08 | 2007-11-06 | Denso Corporation | Anomaly detector for vibratory angular rate sensor |
| JP2006349560A (ja) * | 2005-06-17 | 2006-12-28 | Nippon Soken Inc | 物理量センサにおけるセンサ回路 |
| JP4561528B2 (ja) * | 2005-08-22 | 2010-10-13 | 株式会社デンソー | センサ回路 |
| WO2009150898A1 (ja) * | 2008-06-10 | 2009-12-17 | 株式会社村田製作所 | 外力検知装置および配線破断検出方法 |
| JP5360362B2 (ja) * | 2008-07-17 | 2013-12-04 | セイコーエプソン株式会社 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
| JP5338211B2 (ja) | 2008-09-08 | 2013-11-13 | 株式会社村田製作所 | 振動ジャイロ |
| JP2010151669A (ja) * | 2008-12-25 | 2010-07-08 | Panasonic Corp | 物理量検出回路、物理量センサ装置 |
| JP2010169408A (ja) * | 2009-01-20 | 2010-08-05 | Epson Toyocom Corp | 物理量検出装置 |
| JP5344147B2 (ja) * | 2009-01-20 | 2013-11-20 | セイコーエプソン株式会社 | 物理量検出装置および電子機器 |
| JP2010185714A (ja) * | 2009-02-10 | 2010-08-26 | Panasonic Corp | 物理量センサシステム、物理量センサ装置 |
| WO2011039973A1 (ja) * | 2009-10-01 | 2011-04-07 | パナソニック株式会社 | 慣性センサ |
| JP4831241B2 (ja) * | 2010-05-26 | 2011-12-07 | 株式会社村田製作所 | 振動ジャイロ及びそれを用いた電子装置 |
| JP6222426B2 (ja) * | 2013-04-24 | 2017-11-01 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、電子機器及び移動体 |
| CN109117325A (zh) * | 2017-06-26 | 2019-01-01 | 深圳回收宝科技有限公司 | 终端检测方法、终端及存储介质 |
| JP6982725B2 (ja) * | 2017-10-25 | 2021-12-17 | パナソニックIpマネジメント株式会社 | センサ |
| WO2025187219A1 (ja) * | 2024-03-08 | 2025-09-12 | パナソニックIpマネジメント株式会社 | ジャイロセンサ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2541375B2 (ja) | 1990-12-11 | 1996-10-09 | 株式会社村田製作所 | 検知回路 |
| JP3102703B2 (ja) * | 1991-06-21 | 2000-10-23 | 株式会社リコー | ファクシミリ装置 |
| JPH06207946A (ja) * | 1993-01-12 | 1994-07-26 | Matsushita Electric Ind Co Ltd | 角速度センサ装置 |
| JP3399221B2 (ja) | 1996-04-09 | 2003-04-21 | 松下電器産業株式会社 | 角速度センサ |
| WO1996038712A1 (fr) * | 1995-05-30 | 1996-12-05 | Matsushita Electric Industrial Co., Ltd. | Capteur de vitesse angulaire |
| JPH1151655A (ja) * | 1997-08-05 | 1999-02-26 | Tookin Seramikusu Kk | 圧電振動ジャイロおよびそれに使用される自己診断回路 |
| JP4126785B2 (ja) * | 1997-11-18 | 2008-07-30 | 株式会社デンソー | 角速度センサ |
| JP4019504B2 (ja) * | 1998-06-15 | 2007-12-12 | 松下電器産業株式会社 | 角速度センサ |
| JP3489487B2 (ja) * | 1998-10-23 | 2004-01-19 | トヨタ自動車株式会社 | 角速度検出装置 |
-
2000
- 2000-06-27 JP JP2000192950A patent/JP3674467B2/ja not_active Expired - Fee Related
-
2001
- 2001-06-25 US US09/888,678 patent/US6666090B2/en not_active Expired - Lifetime
- 2001-06-27 KR KR10-2001-0036958A patent/KR100418061B1/ko not_active Expired - Fee Related
- 2001-06-27 DE DE60128033T patent/DE60128033T2/de not_active Expired - Lifetime
- 2001-06-27 EP EP01115527A patent/EP1167922B1/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002213961A (ja) * | 2001-01-15 | 2002-07-31 | Murata Mfg Co Ltd | 振動ジャイロおよび振動ジャイロの自己診断方法 |
| JP2002228451A (ja) * | 2001-01-29 | 2002-08-14 | Murata Mfg Co Ltd | 振動ジャイロおよび振動ジャイロの自己診断方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1167922B1 (en) | 2007-04-25 |
| EP1167922A3 (en) | 2004-04-28 |
| DE60128033T2 (de) | 2007-08-09 |
| US6666090B2 (en) | 2003-12-23 |
| KR100418061B1 (ko) | 2004-02-11 |
| US20020017135A1 (en) | 2002-02-14 |
| KR20020001627A (ko) | 2002-01-09 |
| DE60128033D1 (de) | 2007-06-06 |
| JP2002013930A (ja) | 2002-01-18 |
| EP1167922A2 (en) | 2002-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3674467B2 (ja) | 振動ジャイロ及びそれを用いた電子装置 | |
| US8117913B2 (en) | Angular velocity sensor | |
| JP4529444B2 (ja) | 角速度センサ | |
| JP2000088578A (ja) | 角速度センサ | |
| JP6972845B2 (ja) | 物理量測定装置、電子機器及び移動体 | |
| WO2007114092A1 (ja) | 慣性力センサ | |
| JP5494477B2 (ja) | 慣性力センサ | |
| JP3520821B2 (ja) | 振動ジャイロ用自己診断回路 | |
| JP3709793B2 (ja) | 振動ジャイロおよびそれを用いた電子装置および振動ジャイロの自己診断方法 | |
| JP4924912B2 (ja) | 角速度測定方法および角速度測定装置の診断回路 | |
| JP4924858B2 (ja) | 角速度測定装置 | |
| JPH07181042A (ja) | 角速度センサの故障診断装置 | |
| US20080208411A1 (en) | Method for Controlling an Electric Steering Assistance System | |
| JP2000088584A (ja) | 角速度センサ | |
| JPH0618267A (ja) | 診断機能付振動ジャイロ | |
| JP2504233B2 (ja) | 角速度センサ―の異常検出装置及びそれを用いた車両用舵角制御装置 | |
| JP4765171B2 (ja) | 振動ジャイロおよび振動ジャイロの自己診断方法 | |
| JPH05264279A (ja) | 診断機能付振動ジャイロ | |
| JP2566707B2 (ja) | 診断機能付振動ジャイロ | |
| JP5696293B2 (ja) | 慣性センサ | |
| JP2002213961A (ja) | 振動ジャイロおよび振動ジャイロの自己診断方法 | |
| JP2008261685A (ja) | 角速度センサ | |
| JP2003057037A (ja) | 物理量測定方法、物理量測定装置および物理量測定器への電力供給方法 | |
| JP2008070132A (ja) | 角速度センサ | |
| JP2571893B2 (ja) | 振動ジャイロ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050418 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090513 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090513 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100513 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100513 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110513 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120513 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130513 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130513 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140513 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |