JP3679287B2 - 張力制御装置 - Google Patents
張力制御装置 Download PDFInfo
- Publication number
- JP3679287B2 JP3679287B2 JP34456899A JP34456899A JP3679287B2 JP 3679287 B2 JP3679287 B2 JP 3679287B2 JP 34456899 A JP34456899 A JP 34456899A JP 34456899 A JP34456899 A JP 34456899A JP 3679287 B2 JP3679287 B2 JP 3679287B2
- Authority
- JP
- Japan
- Prior art keywords
- tension
- signal
- detection signal
- control device
- pass filter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 36
- 230000005856 abnormality Effects 0.000 claims description 5
- 238000010586 diagram Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 4
- 230000007257 malfunction Effects 0.000 description 1
Images


Landscapes
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
- Feedback Control In General (AREA)
Description
【発明の属する技術分野】
本発明は、シート材、線条材等の材料搬送中に、検出された張力信号をフィードバック信号として材料の張力を制御する張力制御装置に関する。
【0002】
【従来の技術】
図4はシート材として紙を搬送中に、その張力を一定に保持するように搬送ロールを駆動する電動機の速度を制御する張力制御装置の構成を示すブロック図である。同図において、電動機1が図示を省略した搬送ロールを駆動する。この電動機1を速度制御するために、速度基準回路2から出力される速度基準を入力して電流指令値を出力する速度制御増幅器3と、この電流指令値に従って電動機1の電流を制御する電流制御増幅器4とが設けられている。一方、搬送中の紙に所望の張力を与えるべく、紙の張力基準を設定する張力設定器5が設けられている。また、搬送中の紙に実際に発生する張力を検出する張力検出器6が設けられ、その張力検出信号がアナログ入力基板とも称されるA−D変換器7に加えられ、ここでディジタル信号に変換された張力検出信号が演算手段8に加えられる。演算手段8は張力設定器6の張力基準を一方入力、D−A変換器7から出力される張力検出信号を他方入力として、その偏差を演算してPI演算手段9に加える。PI演算手段9はその入力に対して比例、積分演算を実行して速度補正信号を出力して演算手段10に加える。演算手段10は速度基準回路2から出力される速度基準を一方入力、PI演算手段9からの速度補正信号を他方入力として両入力を加算して速度制御増幅器3に加える。
【0003】
なお、張力検出器1は、例えば、紙の搬送方向と直角の方向からロールを押し当て、このロールが受ける圧力を圧力センサで検出してアナログ信号でなる張力検出信号を出力するものである。また、演算手段8、PI演算手段9及び演算手段10はプログラマブルコントローラ11にその機能を持たせたものであり、速度制御増幅器3及び電流制御増幅器4はディジタル信号に基づいてそれぞれの制御動作を実行する。
【0004】
図4に示した張力制御装置は、電動機1によって駆動される搬送ロールの下流側の紙の張力を制御するもので、張力設定器5によって設定された張力基準と比較して張力検出器6から出力される張力検出信号が小さいときPI演算手段9に正の偏差信号が加えられ、この偏差信号に対して比例、積分演算が施され正の速度補正信号が速度基準回路2の速度基準に加えられる。これによって、電動機1の速度が高められて張力検出信号を張力基準に一致させる張力のフィードバック制御が実行される。
【0005】
【発明が解決しようとする課題】
上述した張力制御装置を構成する張力検出器6の出力又はA−D変換器7の出力、すなわち、張力検出信号には、張力検出器6の構造の如何に拘わらず定常偏差成分(オフセット成分)が存在する。この定常偏差成分は、機械の調整時にゼロになるように調整されるが、紙切れ等で張力検出器6のロール位置がずれたり、温度変化による張力検出器6自体の出力が変化したりすることにより定常偏差成分が発生してしまう。この定常偏差成分が大きくなると、張力制御系が正常に動作しなくなり、その結果、紙切れが発生するというような解決すべき課題を有していた。
【0006】
本発明は上記の課題を解決するためになされたもので、定常偏差成分の影響を受け難い張力制御を可能にする張力制御装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
請求項1に係る発明は、
シート材、線条材等の材料の搬送中の張力を検出し、得られた張力検出信号が予め設定された張力基準に一致するように材料の張力を制御する張力制御装置において、
張力基準に対する張力検出信号の偏差を演算する第1の演算手段と、この第1の演算手段の出力を入力して所定の周波数以上の信号成分を減衰させて出力する低域フィルタと、この低域フィルタの出力信号レベルが所定値を超えたか否かを判別するレベル判別手段と、このレベル判別手段によって所定値を超えたと判別されたとき、低域フィルタの出力信号を記憶する記憶手段と、張力検出手段の出力信号から記憶手段に記憶された値を減算して張力検出信号を補正する第2の演算手段と、を備えたことを特徴とするものである。
【0008】
請求項2に係る発明は、請求項1に記載の張力制御装置において、低域フィルタは外部操作により遮断周波数を可変としたことを特徴とするものである。
【0009】
請求項3に係る発明は、請求項1又は2に記載の張力制御装置において、張力検出手段の出力信号が負値になったことを検出する信号極性判別手段と、この信号極性判別手段が負値を検出したとき張力検出信号の異常を報知する報知手段と、を備えたことを特徴とするものである。
【0010】
【発明の実施の形態】
以下、本発明を図面に示す好適な実施形態に基づいて詳細に説明する。
【0011】
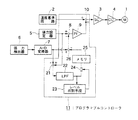
図1は本発明に係る張力制御装置の第1の実施形態の構成を示したブロック図であり、特に紙の搬送制御装置に適用した場合を示している。図中、従来の張力制御装置を示す図4と同一の要素には同一の符号を付してその説明を省略する。ここで、プログラマブルコントローラ11に、新たに、演算手段21、低域フィルタ22、レベル判別手段23、スイッチ手段24、記憶手段としてのメモリ25及び演算手段26の各機能が付加されている。
【0012】
このうち、演算手段21は張力設定器5の張力基準を一方入力、A−D変換器7から出力される張力検出信号を他方入力として、張力基準から張力検出信号を減算して偏差信号出力するものであり、低域フィルタ22はディジタルフィルタでなり、演算手段21の偏差信号を入力して高周波成分を減衰させて実質的には高周波成分を除去して出力するものである。なお、低域フィルタ22は外部からの人為的な操作によりその遮断周波数を任意に調整できるようにしたものである。
【0013】
レベル判別手段23は低域フィルタ22の出力レベルが予め設定した値を超えたことを判別して書き込み指令を出力し、スイッチ手段24をオン状態にして低域フィルタ22の出力信号をメモリ25に記憶させる機能を有している。演算手段26はA−D変換器7から出力される張力検出信号を一方入力、メモリ25に記憶された値を他方入力として、張力検出信号からメモリ25に記憶された値を減算し、補正された張力検出信号として演算手段8に加える構成になっている。なお、演算手段21、26及びスイッチ手段24等はいずれもソフトウェアにて実現される。
【0014】
上記のように構成された本実施形態の動作について、特に従来装置と構成を異にする部分を中心にして図2をも参照して以下に説明する。
【0015】
先ず、張力設定器5によって設定された張力基準が一定であったとしても、紙の搬送中に張力検出器6で検出され、A−D変換器7でディジタル信号に変換された張力検出信号には、直流成分に機械の構造やノイズに起因する交流成分が重畳した波形となる。この張力検出信号に定常偏差成分が含まれていなければ、演算手段21から交流成分のみが出力されて低域フィルタ22に加えられる。低域フィルタ22は遮断周波数を外部から変更可能に構成され、その値を適切に選定することにより低域フィルタ22の出力信号レベルは実質的にゼロとなる。従って、レベル判別手段23はスイッチ手段24をオフ状態に保持するため、メモリ25の記憶値もゼロである。従って、A−D変換器7から出力された張力検出信号が演算手段8によって直接比較され、張力検出信号に重畳された交流成分を除去する極性でPI演算手段9に加えられ、張力を一定に制御する周知のフィードバック制御が実行される。
【0016】
次に、張力設定器5によって設定された張力基準τrefが一定で、かつ、A− D変換器7から出力される張力検出信号τに、図2(a)に示すように、定常偏差成分τoffsetが含まれていたとすると、演算手段21から、定常偏差成分τoffsetに交流信号が重畳した信号が低域フィルタ22に加えられる。低域フィルタ22においては、交流信号成分を除去して、図2(b)に示すように、定常偏差成分τoffsetを出力する。これに対してレベル判別手段23は定常偏差成分τoffsetが予め設定した閾値τthを超えるか否かを判別し、超えると判別したときスイッチ手段24をオン状態にする書き込み指令を出力し、定常偏差成分τoffset をメモリ25に記憶させる。これに従って、演算手段26はA−D変換器7か ら出力される張力検出信号τから定常偏差成分τoffset を減算して演算手段8 に張力のフィードバック信号として加える。これによって、その値が小さい時には制御に影響を与えないが、その値が大きくなると正しい制御ができなくなるという定常偏差成分τoffset を除去することができ、紙切れ等の発生を未然に防 ぐことができる。
【0017】
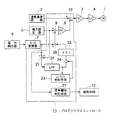
図3は本発明に係る張力制御装置の第2の実施形態の構成を示したブロック図であり、特に紙の搬送制御系に適用した場合を示している。図中、図1に示した第1の実施形態と同一の要素には同一の符号を付してその説明を省略する。ここでは、図1に示した第1の実施形態に対して、張力検出信号τの極性を判別する信号極性判別手段27の機能をプログラマブルコントローラ11に持たせた点と、判定した極性が負であったときに異常を報知する、例えば、表示器又はブザーでなる報知手段12を新たに設けた点が異なっている。
【0018】
第1の実施形態は極性が正の定常偏差信号τoffset が出力されることを前提 としており、閾値τthの極性も正に設定されている。しかるに、張力検出器6の構造によっては、極性が負の定常偏差を発生することがあり、稀ではあるがA−D変換器7から出力される張力検出信号の極性も負になることがある。この場合には演算手段8の出力が過大になり、正常の制御が不能になる。図3に示した第2の実施形態では、A−D変換器7から出力される張力検出信号の極性を信号極性判別手段27によって判別し、その極性が負であったときに、報知手段12によってオペレータに異常を報知する。これによって、張力検出信号の異常による制御の不具合を早期に発見することができる。
【0019】
なお、上記の各実施形態はいずれも本発明に係る張力制御装置を紙の搬送制御系に適用しているが、本発明はこれに適用を限定されるものではなく、シート材、線条材等の材料を搬送すると共に、張力検出手段によって搬送中の材料の張力を検出し、得られた張力検出信号が予め設定された張力基準に一致するように材料の張力を制御する殆どの装置に適用することができる。
【0020】
【発明の効果】
以上の説明によって明らかなように、本発明によれば、定常偏差成分の影響を受け難い張力制御を可能にする張力制御装置を提供することができる。
【図面の簡単な説明】
【図1】本発明に係る張力制御装置の第1の実施形態の構成を、紙の搬送制御系に適用した場合のブロック図。
【図2】図1に示した第1の実施形態の動作を説明するために、時間と張力検出信号及び定常偏差信号との関係を示した線図。
【図3】本発明に係る張力制御装置の第2の実施形態の構成を、紙の搬送制御系に適用した場合のブロック図。
【図4】従来の紙の搬送制御系の構成を示したブロック図。
【符号の説明】
5 張力設定器
6 張力検出器
7 A−D変換器
8,21,26 演算手段
9 PI演算手段
12 報知手段
22 低域フィルタ
23 レベル判別手段
24 スイッチ手段
25 メモリ
27 信号極性判別手段
Claims (3)
- 搬送中の材料の張力を検出し、得られた張力検出信号が予め設定された張力基準に一致するように前記材料の張力を制御する張力制御装置において、
前記張力基準に対する前記張力検出信号の偏差を演算する第1の演算手段と、この第1の演算手段の出力を入力して所定の周波数以上の信号成分を減衰させて出力する低域フィルタと、この低域フィルタの出力信号レベルが所定値を超えたか否かを判別するレベル判別手段と、このレベル判別手段によって所定値を超えたと判別されたとき、前記低域フィルタの出力信号を記憶する記憶手段と、前記張力検出信号から前記記憶手段に記憶された値を減算して前記張力検出信号を補正する第2の演算手段と、を備えたことを特徴とする張力制御装置。 - 前記低域フィルタは外部操作により遮断周波数を可変としたことを特徴とする請求項1に記載の張力制御装置。
- 前記張力検出信号が負値になったことを検出する信号極性判別手段と、この信号極性判別手段が負値を検出したとき前記張力検出信号の異常を報知する報知手段と、を備えたことを特徴とする請求項1又は2に記載の張力制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34456899A JP3679287B2 (ja) | 1999-12-03 | 1999-12-03 | 張力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34456899A JP3679287B2 (ja) | 1999-12-03 | 1999-12-03 | 張力制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001159902A JP2001159902A (ja) | 2001-06-12 |
| JP3679287B2 true JP3679287B2 (ja) | 2005-08-03 |
Family
ID=18370286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP34456899A Expired - Fee Related JP3679287B2 (ja) | 1999-12-03 | 1999-12-03 | 張力制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3679287B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7518798B2 (ja) * | 2021-06-03 | 2024-07-18 | 住友重機械工業株式会社 | 搬送制御装置、搬送制御方法、搬送制御プログラム |
| CN115847786B (zh) * | 2023-02-27 | 2023-05-09 | 太原理工大学 | 一种多束缠绕设备联合驱动系统的张力控制方法 |
| JP7840459B1 (ja) * | 2025-05-22 | 2026-04-03 | 株式会社Rej | 異常検出装置 |
-
1999
- 1999-12-03 JP JP34456899A patent/JP3679287B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001159902A (ja) | 2001-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3007435B2 (ja) | Rf発生装置のマッチング制御回路 | |
| US6903530B2 (en) | Electric motor controller resonance frequency detection apparatus | |
| JP3679287B2 (ja) | 張力制御装置 | |
| JPS6145083Y2 (ja) | ||
| JPS63274398A (ja) | 交流電動機の速度制御装置 | |
| JP7244737B2 (ja) | モータ制御回路及びモータ制御装置 | |
| KR20160141979A (ko) | 인버터 보호 장치 | |
| US12249941B2 (en) | Motor control device, motor control method, and non-transitory computer-readable recording medium | |
| JP7794177B2 (ja) | レゾルバの励磁装置及び励磁方法 | |
| JP2008033707A (ja) | 位置制御装置及びその制御方法 | |
| JPH04109085A (ja) | 空気調和機の保護装置 | |
| JPH04275063A (ja) | ディジタル制御電源装置 | |
| JP2883506B2 (ja) | エキスパンダロールの曲げ量調整装置 | |
| JP2001178167A (ja) | Acr制御の過速度保護方式 | |
| JPH0614488U (ja) | 電動ポンプの吐出圧制御装置 | |
| JP3097709B2 (ja) | インバータの制御装置 | |
| JP3403069B2 (ja) | 位相検出器 | |
| JP2009213274A (ja) | モータの可変速制御装置 | |
| JPH0235559B2 (ja) | ||
| EP4142142A1 (en) | Motor drive device | |
| JP3324912B2 (ja) | 直流ドアモータ制御装置 | |
| JP2713659B2 (ja) | サーボ制御機構の安全装置 | |
| JP2005136825A (ja) | 異常検出装置及びエンジン制御装置 | |
| JP2001178188A (ja) | サーボモータの発振検出装置およびその検出方法 | |
| KR940019908A (ko) | 세탁기의 포 치우침 검출장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20030423 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20040330 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20040330 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050512 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080520 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090520 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100520 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110520 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110520 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120520 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130520 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140520 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |