JP3770073B2 - 遠隔移動ロボット - Google Patents
遠隔移動ロボット Download PDFInfo
- Publication number
- JP3770073B2 JP3770073B2 JP2000334910A JP2000334910A JP3770073B2 JP 3770073 B2 JP3770073 B2 JP 3770073B2 JP 2000334910 A JP2000334910 A JP 2000334910A JP 2000334910 A JP2000334910 A JP 2000334910A JP 3770073 B2 JP3770073 B2 JP 3770073B2
- Authority
- JP
- Japan
- Prior art keywords
- cable
- drum
- robot
- robot body
- guide pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Manipulator (AREA)
- Monitoring And Testing Of Nuclear Reactors (AREA)
Description
【発明の属する技術分野】
本発明は遠隔移動ロボットに関し、特に原子力施設などの通常人間の入ることのできない部屋の狭隘部の点検などの作業に適した遠隔移動ロボットである。
【0002】
【従来の技術】
従来、特開昭58−76799号「原子炉格納容器内監視装置」あるいは特開昭60−230094号「原子炉監視装置」にあるようにTVカメラなどのセンサを搭載して移動する監視点検ロボットの概念は示されていた。また、特開平05−065704号「高架橋点検装置」にあるように移動車に伸縮ブーム,旋回機構,アーム機構などを備えて先端のセンサの位置と向きを変えるような作業装置の概念は示されていた。
【0003】
【発明が解決しようとする課題】
しかし、狭隘な場所において、安全,確実に狭隘部の点検等の作業ができて、かつ必要最小限の機器から構成する単純な機構とすることについてはあまり考慮されていなかった。
【0004】
本発明の目的は、狭隘な場所において、安全,確実に狭隘部の点検などの作業ができて、かつ必要最小限の機器から構成する単純なロボットを提供することにある。
【0005】
【課題を解決するための手段】
本発明の課題を解決するための手段の基本的な構成要件は、ロボット本体が走行レールに沿って走行する台車を有する走行型ロボットにおいて、ロボット本体から出ているケーブルを引っ張っているドラムを固定局側に設け、水平や垂直に曲がっている走行レールのコーナー部には、前記走行レールから外れて前記コーナーの内側に、前記台車がコーナー部を曲がる時にケーブルが引っかかりガイドされるようにガイドポールを配置することである。
【0026】
本発明の基本的な構成要件によれば、ロボット本体が走行レールに沿って走行する台車を有する走行型のロボット本体から出ているケーブルを引っ張っているドラムを固定局側に設けるので、ケーブルはたるんで周囲の障害物にからまることはない。また、走行レールのコーナー部には台車が曲がる時にケーブルがガイドされるようにガイドポールを配置することにより、ケーブルがガイドポール以外の機器にこすれたり、からまったりすることはない。従って、狭隘な場所においても、安全,確実にロボット本体は奥へ入っていくことが可能となり、狭隘部の点検などの作業が可能となる。また、設備としてもガイドポールをところどころに設けるだけなので、単純な設備で必要最小限の機器から構成することが可能となる。
【0048】
【発明の実施の形態】
以下に本発明の実施例を図面を用いて説明する。図1の(a)図と図1の(b)図は本発明を適用した走行型ロボットの基本的な一実施例を示す。
【0049】
ロボット本体20はレール10に沿って移動可能な台車を有しており、ロボット本体20からはケーブル30が出ていてドラム40に巻き取られている。ケーブル30はロボット本体と操作部間の通信用ケーブルでもよいし、映像を伝送するケーブルでもよいし、映像と制御情報を重畳させた信号ケーブルでもよい。また、通信だけでなくロボット本体の動力供給を兼ねてもよい。
【0050】
図1の(b)ではロボット本体20はシャッタ109を開いて、固定局側の挿入装置100から可動レール11が固定レール10に接続してロボット本体20が可動レール11から固定レール10へ乗り移る。
【0051】
ケーブル30は常にドラム40に低張力で巻き取られている。ロボット本体20が前進すればドラム40はケーブルを送り出し、ロボット本体20が後退すればたるんだケーブル30はドラム40に巻き取られる。ドラム40は常に低張力でケーブル30を巻き取っているので、ロボット本体20がそのような動作をすればケーブル30は自動的にドラム40に巻き取られたり、送り出されたりする。
【0052】
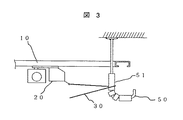
図1の(b)図は部屋の入り口開口部1付近の状況であるので、ケーブル30は直線的に張られているが、レール10が直線ばかりでなく、水平や垂直に曲がっているレールルートもある。その場合には、たとえば図1の(a)図のように本発明のガイドポール50をレール10のコーナー部に設けるとロボット本体20がコーナー部を曲がるとケーブル30はガイドポール50に引っかかりガイドされることになる。
【0053】
このようなガイドポール50をレール10の曲がりコーナー部に設けることで複雑に曲がったレールルート部屋もケーブルを絡ませたり、断線させないで、安全確実に処理することが可能となる。
【0054】
図2は本発明を適用したケーブル30の断面構造の一例である。たとえば、張力に耐える強度部材としてワイヤ33を中心に配置して、その周辺に絶縁導体32を配置した構造となっている。このケーブル断面で最外周部の被覆31に低摩擦部材としてテフロン材を用いた一実施例である。
【0055】
本実施例のようなケーブルが図1の(a)図のようなガイドポール50に引っかかり滑っても外表面がテフロンで低摩擦係数なので、すべり抵抗が小さくなるので、ロボット本体20の牽引量とかドラム40の巻き取り力を小さくしてコンパクトにすることが可能となる。
【0056】
図3は低摩擦抵抗にしたガイドポールの基本的な一実施例を示す。ガイドポール軸心50の外側に回転部材51を設けてある。ケーブル30は回転部材51に接するのでケーブルが動くと回転部材51が軸心50の周りを回転する。回転部材51は滑らかに回転可能としておくことにより、ケーブルが滑らかにガイドされる。
【0057】
これも同様にケーブルの牽引力を小さくできるので、ロボット本体とかドラムを小さくできる。ここで、回転部材51は数珠上の形状で軸心50の曲がったところもケーブルが直接軸心50に接触するスキマがないようにしてもよいし、特殊な形状にしてケーブルが必ず当たるような工夫をするとよい。
【0058】
また、垂直曲がりとか水平曲がりとして予めケーブルがかかる位置がいつも決まっている場所についてはその個所だけにケーブルを回転しながら滑らかにガイドする回転部材を設けるようにしてもよい。
【0059】
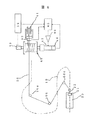
図4はケーブルの張力を検出する検出センサをもうけてドラムを制御する場合の基本的な一実施例を示す。ケーブル張力センサはロボット本体20側に設ける場合とドラム40側に設ける場合がある。当然、両方に設けてもよい。
【0060】
ロボット本体側の一例ではケーブル30がレバー22に保持されていて、バネ23でレバー22とケーブルはケーブル30の張力とつり合って引かれている構造である。ここで、レバー22の動きは回転21の回転角度として検出されればその回転角度はばね23と釣りあった張力の大きさを示すこととなる。
【0061】
一方、ドラム側の一実施例ではケーブル30のかかっている滑車41の反力をロードセル42で検出するものである。この滑車41の反力をロードセル42で検出することによりケーブル張力を検出することができる。ケーブル30の張力が検出できれば、その張力が一定となるようにドラム40を回転駆動制御させることが可能となり、張力を直接検出して制御しているので、張力を安定に一定に保ちながら低張力制御を実現可能となる。
【0062】
図5はロボット本体の移動距離に応じてドラムの駆動制御を行う制御系の基本的な一実施例を示す。レール10に沿って移動するロボット本体20は途中の曲がりレール部でケーブル30はガイドポール50a,50b,50cでガイドされるようになっている。ケーブル30がガイドされてドラム40に巻きついている。
【0063】
ロボット本体20にはレール10の上で現在どこにいるかのセンサを有しており、そのセンシング情報はケーブル30からドラム40に設けられたスリップリング39からロボット制御装置29に通信で送られる。
【0064】
一方、ドラム40の駆動制御はモータ43がアンプドライバ46で駆動されるかドラムの回転数をエンコーダ44で検出してドラム制御装置45にフィードバックがかかるようになっている。
【0065】
これでドラムの回転数(回転角度)の制御が安定に行うことができるようになる。その上でロボット本体の制御装置29ではロボット本体20のレール10の上での現在位置情報をもっているので、その情報をドラム制御装置45へ入力可能とすることで、ロボットの現在位置に応じてドラムの巻き取り,送り出し制御が可能となる。
【0066】
ここで、ロボット本体20のレール10の上での現在位置はレール10の長さに相当して、ケーブル30の長さはガイドポール50a,50b,50cのガイドされたケーブルの全長であり、レール長とは必ずしも一致しないので、予めロボット本体の現在位置とその位置でのケーブル長の関係対応データをレールルートごとに用意しておくことによって、ロボット現在位置から必要なケーブル長に即座に換算できるので、そのケーブル長に必要なドラムの回転角度制御を行うようにするのがよい。この対応データはロボット制御装置29に設けてもよいし、ドラム制御装置45に設けてもよい。
【0067】
図6はドラム制御をロボット本体の位置情報とケーブル張力情報の両方で行う場合の基本的な実施例を示す。ロボット本体20側のケーブル張力はレバー22と回転角度センサ21で検出して、その結果はケーブル30を介して通信でロボット制御装置29に送信されるようにしてロボット制御装置29からロボットの位置情報と同様にドラム制御装置45に送られるようにする。
【0068】
ドラム側の張力は滑車41の反力をロードセル42で検出してそのデータは直接にドラム制御装置45に入力されるようにする。ここで、ドラム制御装置はロボット20の現在位置情報に基づく必要ケーブル長を送り出すとともにロボット側のケーブル張力とドラム側のケーブル張力を常に検出しながら、異常に高い張力がケーブルにかからないようにドラムの回転制御を必要に応じて切り替えるようにする。
【0069】
それによって、安全確実なケーブルの巻き取り,送り出し制御が可能となる。さらに、ドラム制御装置はロボット制御装置からロボット20への動作指令を事前にあるいは同時にもらうことで、ドラム40の動作遅れを予め予想した制御で補うような応答性のよいドラム制御を行ってもよい。
【0070】
図7は本発明の視覚装置を設けた伸縮アーム型マニピュレータの一実施例を示す。ロボット挿入部100は部屋の中に開口部1から伸縮アーム200aと200bからなるアームを挿入した状態を示している。
【0071】
各アーム200aと200bは伸縮ポールなので伸び縮みするほか、回転も可能な構造で2本のアームのつなぎ部の関節では上下左右に回転する構造をもっていて先端の位置を任意遠隔操作できるロボットである。
【0072】
本実施例ではそのアーム先端に視覚装置を設けるが通常ズームレンズ付きのカメラを設けると重量が重たいためアームが大きく撓む。また、アーム駆動時の負荷も大きくなるので、本発明の視覚装置が有効となる。
【0073】
すなわち、本実施例では撮像装置60aには広角レンズ61が付いており、撮像装置60bには望遠レンズ62が付いている2つの視覚装置を設けた。これはCCDなどのカメラは1台が軽く小さいので2つ搭載しても大きな負荷にはならない。また、レンズもズームレンズにするとモータとかレンズ制約条件で軽いものを製作するのは容易ではない。
【0074】
一方、固定焦点レンズであれば、小さく軽量なものを容易に製作できるので、予め必要な2つのレンズをそれぞれ設けた撮像装置を2つ搭載する。これによって、ズームレンズの広角と望遠の機能を兼ね備えた小型軽量な視覚装置を容易に得ることが可能となる。2つの撮像装置の映像は2台のモニタで同時に見てもよいし、切り替えて1台の撮像装置の映像のみを見るようにしてもよい。
【0075】
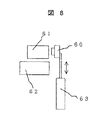
図8は2つ以上のレンズを設けて撮像装置は1台で共用する場合の基本的な一実施例を示す。広角レンズ61と望遠レンズ62を並べて配置して1台の撮像装置60をアクチュエータ63の先に設けて、どちらのレンズにも切り替えて撮像可能なようにしたものである。これは撮像装置が赤外線カメラなど特殊な場合には1台が大きく重くなる場合もあるので、そのような場合に有効は発明である。
【0076】
図9は遠隔ロボットの伸縮駆動力を大きくとることのできる伸縮機構部の基本的な一実施例を示す。伸縮ポール201,202,203は筒状の部材で伸縮可能な組み合わせになっているが、その駆動をポール201の先端にベルト204aと204bの端部を固定して、ベルト204aと204bはドラム205aと205bに巻き取られている。
【0077】
ここで、ベルト204aと204bはドラムに巻き取られる方向には曲げやすく、その反対方向には曲げづらい部材とすることで、ドラムには巻き取りやすく、伸ばした状態での剛性は高くすることが可能となる。ベルト204aと204bはコンベックスのように断面が湾曲させた鋼板で作ればこのような特性が得られる。あるいは、チェーンを反対側には折れ曲がらないように詰めを設けてたチェーンを用いてもよい。
【0078】
また、ベルト204aと204bが伸縮ポールの中で伸びていくと背中合わせの部分がたるんでしまって十分な剛性が得られなくなるので、各ポールの根本にガイド部201s,202sを設けておけば、何段の伸縮ポールになっても緩むことなく駆動することができる。
【0079】
ガイド部は各ポールの底板にベルトが通るスリットを設けてもよいし、小さなローラ付きで滑らかにガイドできるものとしてもよい。スリット構造は単純で簡単な方法である。ここで、ドラム205aと205bがモータで駆動制御されるようにすれば、軽くて長い伸縮ポールの駆動機構とすることができる。別にベルトを動かす駆動部を設けてもよい。
【0080】
図10はさらにベルトの合わさる面に押し付けると接着する機能面を設けた場合の基本的な一実施例を示す。はがすときにはドラム205aと205bに巻き取ることで剥がれる。押し出す場合には合わさった直後に加圧ローラ206aと206bで押し付けるようにすることで、機能面が接着するようにしたものである。
【0081】
この構成で加圧ローラ206aと206bを駆動ドラムにすると根本で剛性を高くして駆動ドライブできるようになる。また、ベルトに凹凸を設けたり、穴を設けて、ドライブローラ206aと206bにも凹凸を設けるとかし、ベルトの凹凸や穴にドラムの凹凸をひっかけてより大きな駆動力をベルトに伝えるようにしてもよい。
【0082】
図11は軽快なケーブル処理を可能とした本発明を適用した床面走行型ロボットの基本的な一実施例である。挿入機構100で部屋の開口部1から伸縮アーム200を挿入可能としている。伸縮アームはストロークS分前後に伸縮制御可能である。
【0083】
伸縮アーム200の先端には回転軸θ1,θ2を有するパンチルト機構に視覚センサ65が取り付けてある。こればTVカメラでもよいし、特殊な撮像装置でもよい。回転軸θ1,θ2で部屋の中を撮像することが可能となっている。また、伸縮アーム200には滑車48を介してケーブル30がガイドされて、走行型ロボット本体20とケーブルドラム40につながっている。アーム200は伸縮しなく長いポールを人手で挿入するようにしてもよい。
【0084】
今までは走行型ロボットが床を走るとケーブルが絡まるなどがあって、あまり自由に動かし回すことができなかったが、本発明を適用すれば走行型ロボット本体20は床面を自由に走行させることが可能となる。本発明はロボット本体20のケーブル出口部にケーブルが回転可能なようにたとえばスリップリングを介して取り付け、さらにケーブル30を常に低張力でドラム40で巻き取っておくようにする。
【0085】
それによって、部屋の中のどこを走ってもケーブルはからまらないように常にちょうどよい適切な長さにしておくことが可能となる。また、ロボット本体にランプなどの撮像装置のターゲットとなる部品26を設けておき、それを撮像装置65で撮影してロボット本体の現在位置を求める。
【0086】
図13には撮像画像の一例を示すが、26gがターゲットランプ26の画像である。この画像データから画面内のターゲットの画像内の位置は画像処理で求めることができるので、さらにパンチルト機構の角度θ1,θ2、伸縮アームのストロークSと開口部1の位置と床面の位置関係が既知であれば、床面上のターゲット26(A点)の位置は幾何計算からもとまるので、滑車48(B点)の位置も既知なので、線分ABの長さが求まり、その長さから、ドラム40のケーブル巻き取り,送り出し量を制御するようにすれば、容易に常にちょうどよいケーブル長を保つことができるようになる。
【0087】
位置の検出精度は撮像装置の分解能とかレンズ系の画角によってきまってくるが、装置のセッティング誤差もあるので、撮像装置を挿入後部屋の角のコーナー部等の部屋の基準となる部位を撮影して予め用意しておく部屋のCADデータと対応させて撮像装置の部屋の中での正確な位置と姿勢を最初にキャリブレーションするのがよい。
【0088】
ロボット本体20に設けたターゲット26を撮像装置65で捕らえる位置検出だけでは、たとえばロボット本体20が物の影に入った場合とか場所によって撮像装置に撮影されなくなる時があるので、たとえばジャイロセンサとか壁からの距離を計測する距離センサとか左右の走行車輪あるいはクローラの回転数をカウントするなどの積算型の位置検出データも持っておき、撮像装置で撮影したときに絶対位置として積算型センサによる位置データを構成するやりかたで両方をうまく使い分けることで、ものの影に入っても継続して位置を正しく検出して、その結果により適切なケーブル長を制御できるようになる。
【0089】
図12はロボットの位置検出とケーブルの張力検出を組み合わせた場合の基本的な一実施例を示す。ロボット本体20のターゲット26(A点)から滑車48(B点)を介してケーブル30はドラム40に巻かれているが、途中滑車41の反力をロードセル42で検出可能としている。これでドラム側のケーブル張力を検出することが可能である。
【0090】
ロボット本体の位置データは撮像装置65の画像処理の結果得られるデータもあるが、それはロボット制御装置29あるいはドラム制御装置45に入力され必要なケーブル長が演算されてケーブルドラム40の回転角が制御駆動される。ロボット本体20の積算型センサの情報はケーブル30を介してドラム40のスリップリング39からロボット制御装置29へ送信され、同じようにドラム制御の位置情報として活用される。
【0091】
ケーブル反力を検出するロードセル42の信号はドラム制御装置45へ入力されて、たとえば、ケーブルが物に絡まって計算値ケーブル長では短くなって一時的にケーブルが張った場合には張力が大きくなるので、所定の張力以上になった場合にはドラムケーブルを送り出す制御にするとか、常時一定の張力になるようにドラムを制御して計算したケーブル長と実際のケーブル長が大きく違った場合には何かからまった状態などの異常である可能性があるので、その場合には警報でオペレータに知らせるなどの異常検出制御を行ってもよい。
【0092】
また、オペレータが強制的に低張力制御とケーブル長をあわせる制御と切り替えられるようにしてもよい。何もない空間ではケーブル長を演算して送り出す制御を適用して、柱とか物にケーブルがひかかり直線以外のケーブルパスになる場合にはケーブル長制御でなく、低張力制御に切り替えて運転可能なようにするのがよい。
【0093】
滑車48はドラム40と同期して補助的にモータドライブされるのがケーブルを円滑に送り出し巻き取りが可能となる。この滑車48はドライブするときだけケーブルをはさみ込む機構があるのがよい。この滑車48を常時ケーブルを挟み込んでドライブする場合にはこの部分でケーブル張力を検出するようにするのがよい。
【0094】
図13には撮像画像の一例を示すが、26gがターゲットランプ26の画像である。この画像データから画面内のターゲットの画像内の位置は画像処理で求めることができるので、さらにパンチルト機構の角度θ1,θ2、伸縮アームのストロークSと開口部1の位置と床面の位置関係が既知であれば、床面上のターゲット26(A点)の位置は幾何計算からもとまる。
【0095】
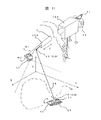
図14,図15は狭隘開口部から挿入する細長いロボットで床面走行に適したロボットの基本的一実施例を示す。走行駆動はすべりなどが少ない左右のクローラ70aと70bで走行する。但し、細長い車体の長いクローラは旋回抵抗が大きくなりスムーズな旋回ができないので、クローラ70aと70bは適度な長さのものとする。
【0096】
それでも走行車体は長く大きいので、その前後の自重は車輪73,74で受ける構成としてある。クローラ70aと70bの駆動制御はモータ71a,71bで左右独立に制御できるようにしておけば旋回動作も可能である。
【0097】
ケーブルのスリップリング25は旋回中心となる台車の中央に配置する。車体の前方にはこの場合TVカメラ60を配置してTVカメラ60aのようにチルト動作可能なように構成する。これによって、床面を軽快に走行して部屋の中の点検が容易にできる走行型ロボットとすることができる。
【0098】
カメラ60が水平の位置になったとき、先端にミラー611が45度傾斜して出るような機構を設ければ床面も同じカメラで点検が可能となる。ランプターゲットはケーブル30がスリップリングで回転してどちら側にくるか不確定なので、ケーブル30がターゲットを隠さないようにランプターゲットを26a,26b,26cの3個を配置して常にどれか2つのランプは撮像されるようにしてその幾何学的配置あるいはランプの色などからロボット本体の位置と姿勢を検出するようにしてもよい。
【0099】
クローラの回転数はエンドレスのポテンショメータ72a,72bを配置してその回転角信号を積算して走行位置を検出する。ポテンショメータを用いるのは放射線に強いからである。これは放射線に強い磁気エンコーダを用いてもよい。もちろん放射線がない環境ではオプティカルエンコーダでもよい。
【0100】
また、本実施例ではケーブル30aをレバー75に回転可能なように保持させておき、レバー75を後ろへ倒すとケーブルは30bにように後方へ出るようにしている。これによって、ケーブルを常に張った状態で走行させるモードとケーブルを後ろにたらして牽引する方式を切り替えて両方式のケーブル処理モードを切り替えて使い分けができるようになる。
【0101】
これは部屋空間に物があって、ケーブルを張ると物とケーブルが干渉するので、どうしてもケーブルを後ろにたるませて牽引しながらものの下へ入っていきたいという場合に切り替えて有効に安全に走行ロボットを遠隔操作できるようになる。
【0102】
図16はマニピュレータに視覚装置を搭載して遠隔での物体へのアクセスを容易にする遠隔ロボットの基本的な一実施例を示す。挿入装置100で開口部1からマニピュレータの伸縮アーム200a,200bは挿入される。マニピュレータの先端には本実施例ではハンド301が取り付けてあり、アクセスした物体をハンドリングできるようになっている。
【0103】
床面500には対象物400が置いてある。マニピュレータのアーム200bの根本には視覚装置650があり、オペレータはこの視覚装置からの情報でマニピュレータを操作してハンドリング作業を行う必要がある。
【0104】
ここで、視覚装置に通常のTVカメラを取り付けた場合、単眼のTVカメラでは距離間隔が得られないためなかなか対象物400に正確にアクセスすることはできない。立体視覚装置を搭載する方法もあるが、オペレータの目が疲れるのが一般的である。そこで、本発明では視覚装置に2次元のスキャニング機構を有する距離計測センサを搭載したものである。当然TVカメラも合わせて搭載してよい。
【0105】
図17は2次元のスキャニング機構を内蔵した放射線の高い雰囲気で使用可能な距離計測センサの基本的な一実施例を示す。視覚装置650の中には耐放射線カメラ651が耐放射線ズームレンズ652を付けて配置されている。
【0106】
ズームレンズの画角は距離計測時には必要な条件パラメータとなるので、設定値は計算機659が管理する。カメラ651の隣にはレーザ光源656から耐放射線光ファイバ655を経由してレーザ光線がミラー654cで反射してスキャンモータ653bのミラー654bで反射してスキャンモータ653aのミラー654aで反射して前方へでていく。
【0107】
ここでスキャンモータ653a,653bを駆動制御するとレーザは距離L離れたところで、幅W×高さHの2次元のスキャンエリア657をスキャニングできるようになっている。ここで、カメラ651の画像にはレーザ光線が写っており、画像中のレーザ光線の位置とカメラ画角とミラーとカメラ間の距離が既知であれば距離Lを三角測量の原理から求めることは可能であるので、スキャニングした範囲657の距離情報を得ることができる。
【0108】
ここで、視覚装置650の構成部品は耐放射線カメラとミラー(これはステンレス製で製作すれば耐放射線ミラーになる。)とモータから構成され放射線に弱い半導体レーザは外に配置できるので、放射線に強い距離計測センサを得ることができる。
【0109】
モータはステップモータでもよいし、ポテンショメータの角度データフィードバックのサーボ制御でもよいが、モータの駆動ユニット658は放射線高くない環境に設置できるようにする。
【0110】
カメラ651からの映像は計算機959の画像処理ボードを介して入力できるようにしておき、計算機659でモータの制御も行えるようにしてよい。
【0111】
計算機659のCRT659aにはTVカメラの生映像を表示したり、計算機659で距離K即データから計測対象物の3次元CADデータを生成してまた、マニピュレータの姿勢情報を計算機659にリアルタイムで取り込めるようにすれば、予め入力しておくマニピュレータの形状データ、部屋の環境データから、マニピュレータのCADデータをCRT659aに表示することが可能となる。
【0112】
さらに距離を計測してその3次元の点郡データから対象物のCADデータを生成して、視覚装置650の位置と姿勢データがマニピュレータ制御装置から情報として取り込めれば計測対象物から生成したCADデータもマニピュレータや環境データと同じCADデータの座標系に変換できるので、正しい相対位置、姿勢関係で同じCRT659aにCADデータを表示することが可能となる。ここで、対象物,マニピュレータ,環境データがCADデータで表示されるので、任意の視点から表示することも容易となる。
【0113】
図18はCADデータを表示したCRTの一例を示す。ここではマニピュレータのハンド301と対象物400の相対位置関係がマニピュレータの操作上必要となる。それで、マニピュレータと対象物を真横から見た視点から表示している。
【0114】
図18のCRT659aには床の環境データのCADデータ500g,対象物のCADデータ400g,マニピュレータ,ハンドなどのCADデータ200bg,301gが横から見た状態で表示される。ほぼ横から見た映像なのでハンド301gと対象物400gの距離情報はCADデータの間隔Cとして視覚的に容易に把握することが可能となり、この映像を見ながら図16のマニピュレータを操作すると容易に対象物400にアクセスすることが可能となる。
【0115】
視覚装置650はマニピュレータの根本なので、TVカメラを配置してもとても真横から見た映像は得られない。視覚装置650の位置からでも距離センサであれば対象物までの距離情報を得ることができ、それを見やすいCADデータに生成して真横から見たCADデータを見ながら操作すれば真横にカメラを配置したのと同等の操作性で距離感を得ながらハンドリング操作が可能となる。
【0116】
ここで、対象物のCADデータは環境CADデータの一部になっているが、マニピュレータのCADデータはリアルタイムでマニピュレータの姿勢データは入力されるので、実際のマニピュレータの動作と同じようにCADデータのマニピュレータを動作させることができるので、実画像をみながらと同じような操作ができる。
【0117】
このような部屋の中で真横からTVカメラで撮影しようとするとさらにもう1台マニピュレータが必要になる。本発明によれはそれを1台のマニピュレータの根本に載せた視覚装置で実現できることになる。なお、対象物のCADデータの生成は計測した2次元の点郡データをスキャニング方向の順番に結んで面を定義すれば容易にサーフィスの面データを定義することができるので、その方法が簡単な処理なのでリアルタイム性も高くなる。
【0118】
図19はカラーカメラと距離計測センサを組み合わせた視覚センサのデータによる対象物のCADデータの生成概念の一例を示す。視覚装置650にはカラーカメラ651とレーザをスキャンするミラー654aがあり、カラーカメラの視野範囲657cはレーザ光線のスキャン範囲657dをカバーするように設定されている。
【0119】
レーザ光線のスキャン範囲657dにある複数の白丸が3次元の距離計測データである。白丸の座標は視覚装置の座標系650aで表現されたものである。これは後にロボットのCADデータや環境のCADデータと同じ座標系に変換して表示すれば図18もモニタ表示のよに各々の相対位置関係を正しく表示することは可能となる。
【0120】
ここで、各白丸のところのカラー情報はミラー654aと相対位置の既知のカラーカメラ651の情報から幾何学的に求めることができる。そうすると各白丸に各々同じ場所のカラー情報を対応させることができるので、白丸を図19のように機械的に結んで定義した面のCADデータの一番小さな三角形の要素ごとに色を各点のカラー情報から決めて定義すれば、たとえば白い床に対応するCADデータの部分500gは白色で青い円柱に相当するCADデータの部分400gは青で表示することができる。
【0121】
このようにすれば、床と円柱の境界がはっきりしないが、色情報によりモニタに表示したときオペレータには識別しやすくなる。また、自動でロボットアームを制御する場合でも色情報により、自動識別させることも可能となる。また、色付け方法は三角形の面に付けてもよいし、各白丸の点に色を付けるだけでも表示すればある程度識別は可能となる。この場合、点データの処理だけになるので、応答性のよい表示システムにすることができる。
【0122】
【発明の効果】
以上のように本発明によれば、狭隘な場所において、安全,確実に狭隘部の点検やハンドリングなどの作業ができて、かつ必要最小限の機器から構成する単純なロボットを得ることができる。
【図面の簡単な説明】
【図1】本発明の基本的な一実施例による走行型ロボットを示しており、(a)図は走行型ロボットの走行レールコーナー曲がり部のロボット本体の状況を示す図であり、(b)図は走行型ロボットの基本的な一実施例の全体構成を示す図である。
【図2】本発明の実施例で適用したケーブルの断面図である。
【図3】本発明の実施例で適用した低摩擦抵抗にしたガイドポールの立面図である。
【図4】本発明の実施例で適用したケーブルの張力を検出する検出センサをもうけてドラムを制御する場合の走行型ロボットの全体構成を示す図である。
【図5】ロボット本体の移動距離に応じてドラムの駆動制御を行う本発明の実施例で適用した制御系の基本構成図である。
【図6】ドラム制御をロボット本体の位置情報とケーブル張力情報の両方で行う本発明の実施例で適用した制御系の基本構成図である。
【図7】本発明の実施例で採用した視覚装置を設けた伸縮アーム型マニピュレータの全体斜視図である。
【図8】本発明の実施例における2つ以上のレンズを設けて撮像装置は1台で共用する場合の基本的な構成を示す図である。
【図9】本発明の実施例による遠隔ロボットの伸縮駆動力を大きくとることのできる伸縮機構部の基本的な構成を示す図である。
【図10】図9の実施例でさらにベルトの合わさる面に押し付けると接着する機能面を設けた場合の基本的な構成を示す図である。
【図11】軽快なケーブル処理を可能とした本発明を適用した床面走行型ロボットの全体斜視図である。
【図12】本発明の実施例によるロボットの位置検出とケーブルの張力検出を組み合わせた場合の基本的な構成を示す図である。
【図13】本発明の実施例による撮像画像の画面表示図である。
【図14】本発明の実施例による狭隘開口部から挿入する細長いロボットで床面走行に適したロボットの平面図である。
【図15】狭隘開口部から挿入する細長いロボットで床面走行に適した本発明の実施例によるロボットの側面図である。
【図16】マニピュレータに視覚装置を搭載して遠隔での物体へのアクセスを容易にする本発明の実施例による遠隔ロボットの全体斜視図である。
【図17】2次元のスキャニング機構を内蔵した放射線の高い雰囲気で使用可能な本発明の実施例で採用される距離計測センサにかかわる設備の全体図である。
【図18】本発明の実施例によるCADデータを表示したCRTの画面を示した図である。
【図19】カラーカメラと距離計測センサを組み合わせた視覚センサのデータによる対象物の本発明の実施例によるCADデータの生成概念を示す図である。
【符号の説明】
1…点検孔、10…レール、20…移動ロボット本体、21…回転角度センサ、23…ばね、25…スリップリング、26,26a,26b,26c…ターゲットランプ、26g…画像の中のターゲットランプ、29…ロボット制御装置、30,30a,30b…ケーブル、31…低摩擦のケーブル被覆、39…スリップリング、40…ドラム、42…ロードセル、45…ドラム制御装置、48…ケーブルドライブ滑車、50,50a,50b,50c…ガイドポール、60,60a,60b…撮像装置、61…広角レンズ、62…望遠レンズ、63…アクチュエータ、65…視覚装置、70a,70b…クローラ、71a,71b…モータ、72a,72b…ポテンショメータ、73,74…車輪、75…ケーブル保持可動レバー、100…挿入装置、200a,200b…伸縮アーム、200,201,202,203…伸縮ポール、201s,202s…各ポール内のガイド部、200bg…アームCADデータの表示画像、204a,204b…ベルト、205a,205b…駆動ドラム、206a,206b…加圧ローラ、301…ロボットハンド、301g…ロボットハンドのCADデータの表示画像、400…作業対象物、400g…対象物のCADデータの表示画像、500…床面、500g…床面のCADデータの表示画像、650…距離計測機能付き視覚装置、650a…視覚装置の座標系、651…耐放射線カメラ、652…耐放射線ズームレンズ、653a,653b…スキャンモータ、654a,654b,654c…ミラー、655…耐放射線ファイバケーブル、656…レーザ光源、657…スキャニング範囲、658…モータ,レンズ駆動装置、659…計算機、659a…CRTモニタ。
Claims (3)
- ロボット本体が走行レールに沿って走行する台車を有する走行型ロボットにおいて、ロボット本体から出ているケーブルを引っ張っているドラムを固定局側に設け、水平や垂直に曲がっている走行レールのコーナー部には、前記走行レールから外れて前記コーナーの内側に、前記台車がコーナー部を曲がる時にケーブルが引っかかりガイドされるようにガイドポールを配置したことを特徴とする遠隔移動ロボット。
- 請求項1において、ガイドポールは少なくとも主要部のガイドポールがポールの軸心と軸心に対して回転可能なように取り付けた回転部材とからなるものであることを特徴とする遠隔移動ロボット。
- 請求項1において、ドラムは、ロボット本体の移動距離を検出する距離検出センサの信号に基づきロボット本体の位置を検出して、そのロボット本体とドラムと各ガイドポールの間でケーブルを直線的に張った場合のケーブル長さをロボット本体の位置と対応させてあらかじめケーブル長の関係対応データとして求めておき、その関係対応データに基づき現在のロボット本体位置に対応した必要なケーブル長を求め、そのケーブル長となるように回転駆動されるドラムであることを特徴とする遠隔移動ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000334910A JP3770073B2 (ja) | 2000-10-30 | 2000-10-30 | 遠隔移動ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000334910A JP3770073B2 (ja) | 2000-10-30 | 2000-10-30 | 遠隔移動ロボット |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005154842A Division JP2005324327A (ja) | 2005-05-27 | 2005-05-27 | 遠隔移動ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002137180A JP2002137180A (ja) | 2002-05-14 |
| JP3770073B2 true JP3770073B2 (ja) | 2006-04-26 |
Family
ID=18810742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000334910A Expired - Fee Related JP3770073B2 (ja) | 2000-10-30 | 2000-10-30 | 遠隔移動ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3770073B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7512207B2 (en) * | 2005-04-12 | 2009-03-31 | General Electric Company | Apparatus for delivering a tool into a submerged bore |
| US7641402B2 (en) * | 2005-12-30 | 2010-01-05 | Honeywell International Inc. | Transport system for monitoring industrial process |
| JP5239519B2 (ja) * | 2008-06-03 | 2013-07-17 | 株式会社安川電機 | ロボットハンド |
| KR101074451B1 (ko) | 2009-04-23 | 2011-10-18 | (주)미니로봇 | 로봇의 유선조종장치 |
| JP5377198B2 (ja) * | 2009-09-29 | 2013-12-25 | 高砂熱学工業株式会社 | 大空間の温度計測方法および装置 |
| JP6005496B2 (ja) * | 2012-12-07 | 2016-10-12 | 株式会社東芝 | 遠隔監視装置および遠隔監視方法 |
| JP6578837B2 (ja) * | 2015-09-15 | 2019-09-25 | 東京電力ホールディングス株式会社 | 遠隔操作ロボットシステム |
| CN106607907B (zh) * | 2016-12-23 | 2017-09-26 | 西安交通大学 | 一种移动视觉机器人及其测控方法 |
| CN113696223B (zh) * | 2021-08-24 | 2023-11-21 | 江苏科技大学 | 一种基于嵌套导向结构的垂直同步联动多级伸缩臂 |
| CN113581465B (zh) * | 2021-09-15 | 2023-04-18 | 郑州科技学院 | 电力巡检行走机构、电力巡检机器人及其电力巡检系统 |
| CN117961933A (zh) * | 2024-03-14 | 2024-05-03 | 睿尔曼智能科技(北京)有限公司 | 一种自动绕线机器人及其控制方法 |
-
2000
- 2000-10-30 JP JP2000334910A patent/JP3770073B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002137180A (ja) | 2002-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3770073B2 (ja) | 遠隔移動ロボット | |
| US6820980B1 (en) | Automatic pan and tilt compensation system for a camera support structure | |
| US7460980B2 (en) | Method for the control of a pipe inspection system and for the evaluation of the inspection data | |
| JP2019078746A (ja) | ケーブル懸架式プラットフォームを用いた構造体を測定及び検査するための方法 | |
| EP3976525B1 (en) | Automated mobile vehicle lift column | |
| CN111412342A (zh) | 管道检测机器人及管道检测方法 | |
| JPH10277976A (ja) | 遠隔操作システム | |
| JP7023492B2 (ja) | 移動体の追従画像提示システム | |
| US12485559B2 (en) | Sensing in continuum robots | |
| US11732440B2 (en) | Remote operation system and remote operation server | |
| EP1192024B1 (en) | Calibrating a visual guided robot with two imaging devices | |
| JP6146994B2 (ja) | クレーンの監視カメラ | |
| JPH1034570A (ja) | ロボット遠隔制御システム | |
| JPH05289739A (ja) | 立体画像処理装置およびテレオペレーティングシステム | |
| JP2005324327A (ja) | 遠隔移動ロボット | |
| JPH05147882A (ja) | クレーン操作装置 | |
| JPH05292543A (ja) | 視覚装置 | |
| JP4090963B2 (ja) | 多次元移動位置決め装置 | |
| US20030016285A1 (en) | Imaging apparatus and method | |
| JPH07328971A (ja) | Tvカメラ付マニピュレータ | |
| JPH02219377A (ja) | 画像情報伝送装置 | |
| JPH02114807A (ja) | 架空ケーブルの点検ロボット | |
| JP3357461B2 (ja) | 立体撮影装置の位置と角度の制御装置 | |
| JP7682700B2 (ja) | 移動ロボット操作システム | |
| US20250052996A1 (en) | Automatic slap impact mitigation system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050405 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060130 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090217 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090217 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100217 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100217 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110217 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120217 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130217 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |