JP3846829B2 - 移動体の操舵角制御装置 - Google Patents
移動体の操舵角制御装置 Download PDFInfo
- Publication number
- JP3846829B2 JP3846829B2 JP29726098A JP29726098A JP3846829B2 JP 3846829 B2 JP3846829 B2 JP 3846829B2 JP 29726098 A JP29726098 A JP 29726098A JP 29726098 A JP29726098 A JP 29726098A JP 3846829 B2 JP3846829 B2 JP 3846829B2
- Authority
- JP
- Japan
- Prior art keywords
- steering angle
- steering
- moving body
- guide line
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
【発明の属する技術分野】
本発明は、操舵輪と固定輪とを備えた無人搬送車の操舵輪に対する操舵角制御装置に関する。
【0002】
【従来の技術】
近年、製造業においては自動化が進んでおり、その生産ラインには無人搬送車に組立て部品を搭載して自動走行させ、組立て部品を所望の目的地まで搬送する自動搬送システムが採用されている。
【0003】
このような自動搬送システムにおける無人搬送車の操舵角制御方式には、操舵輪の位置を制御する操舵輪位置制御型操舵角制御方式と、車体上の基準点の位置を制御する車体位置制御型操舵角制御方式とがある。これらはいずれも以下に説明するように、走行速度によらず走行軌跡が一定になるという特性を持つ制御方式である。
【0004】
操舵輪位置制御型操舵角制御方式は、ガイド線に対する操舵輪位置偏差に応じて、操舵角速度指令値を出力するものである。代表的な操舵輪位置制御型操舵角制御方式には、ガイド式の誘導方式におけるスイングアーム方式がある。
【0005】
スイングアーム方式の操舵角制御方式では、ガイド線40が床面に設けられる。したがって、このガイド線は物理的なガイド線と呼ばれる。これに対し、後で述べるガイドレス式では、ガイド線が仮想的に設定される。したがって、このようなガイド線は仮想的なガイド線と呼ばれる。
【0006】
スイングアーム方式の操舵角制御方式は、図4に示されるように、操舵輪41の操舵軸に取り付けられたスイングアーム42の先端が、常にガイド線40上を移動するように操舵角を制御する方式である。スイングアーム42の先端にはガイド線検出器43が取り付けられており、ガイド線40との位置偏差を検出する構造となっている。44は固定輪である。この他、操舵輪41の位置偏差を計測する手段と、操舵輪41の操舵角αを検出する操舵角センサとを備えている。操舵輪41の位置偏差を計測する手段、操舵角センサはいずれも周知であるが、操舵角センサは、例えば操舵輪に取付けられたエンコーダで実現される。また、位置偏差を計測する手段について言えば、次のような手段が用いられている。床面に、ガイド線40に沿って間隔をおいて複数のターゲットを埋設しておく。これらのターゲットは位置が既知であるので、このターゲットを検出することで操舵輪41の現在位置を計測し、この現在位置のガイド線40からのずれを操舵輪位置偏差として算出する。一方、後で述べる仮想的なガイド線である場合には、GPSによるナビゲーション装置を使用したものが知られている。
【0007】
図5は、図4におけるガイド線40と操舵輪41及びガイド線検出器43の関係を拡大して示した図である。図5では、ガイド線40からの操舵輪41のずれを操舵輪位置偏差ew として示し、操舵角指令値αr 、操舵角計測値αm を示している。スイングアーム42の長さはLである。
【0008】
この制御系は、図6に示されるように、演算部51を含み、操舵輪41のガイド線横断方向の位置制御ループと、その内側にあって演算部52を含む操舵角制御ループとから構成されている。演算部51は、操舵輪位置偏差ew を受けて操舵角指令値αr を出力する。演算部52は、操舵角指令値αr と操舵角計測値αm との差である操舵角偏差を受けて操舵角速度指令値αrvを出力する。操舵角速度指令値αrvは、図示しない操舵モータを駆動するためのアンプを含む駆動部に出力される。
【0009】
以上の制御は、以下の数1に基づいている。
【0010】
【数1】

図7に示されるように、位置制御ループの出力である操舵角指令値αr は、ガイド線横断方向の操舵輪位置偏差ew とスイングア−ム42の長さLで決定される。操舵角速度指令値αrvは、ガイド線検出器43から出力されるガイド線40とガイド線検出器43との位置偏差によって決定される。
【0012】
いま、操舵輪位置偏差ew が小さく線形近似が可能であるとすると、操舵角指令値αr は操舵輪41のガイド線横断方向の速度指令値、操舵角速度指令値αrvはガイド線横断方向での操舵輪41の加速度指令値と見なすことできる。ただし、ここでの速度および加速度は時間に対する微分値ではなく、操舵輪41のガイド線接線方向の移動距離に対する微分値である。
【0013】
従って、この制御系は、操舵輪41のガイド線接線方向の移動距離に対するガイド線横断方向の応答性を規定することになり、結果として操舵輪41の軌跡は走行速度によらず同一となる。
【0014】
一方、ガイドレス式の誘導方式における操舵輪位置制御型操舵角制御方式は、操舵角指令値を仮想的なガイド線に対する操舵輪位置偏差に応じて決定し、さらに操舵角速度指令値を操舵角指令値と実際の操舵角計測値との差である操舵角偏差に応じて決定するものである。これはスイングアーム方式の操舵角制御方式を線形近似したものと同一で、結果として操舵輪の軌跡も同様に走行速度によらず同一となる。
【0015】
これらの操舵輪位置制御型操舵角制御方式の移動体位置の軌跡は以下のようになる。まず、制御対象とする移動体を、図8に示すような車輪配置(1つの操舵輪71、2つの固定輪74)でモデル化し、2つの固定輪74の中間位置を移動体の基準点として定義する。
【0016】
初期条件として操舵輪71が誘導線上にあり、基準点がガイド線70から外れた位置にあるとする。理想的なスイングアーム方式操舵角制御により操舵輪71がガイド線上を誤差無く移動するとすると、基準点の軌跡は以下の数2で近似される。
【0017】
【数2】
【0018】
この式(2)より、移動体の軌跡も、走行速度によらず同一となることがわかる。
【0019】
次に、本発明者により提案されている車体位置制御型操舵角制御方式を図9、図10を参照して説明する。図9においても、1つの操舵輪81と2つの固定輪82とを備え、2つの固定輪82の中間位置を移動体の基準点として定義している。
【0020】
本制御方式は、図10に示す操舵角制御装置に適用される。本操舵角制御装置においては、移動体の位置目標値と位置計測手段による移動体の位置計測値との差が、基準点のガイド線80に対する横断方向位置偏差として算出される。演算部91は、横断方向位置偏差に応じて姿勢角指令値(目標とするガイド線80に対する移動体の向き)を決定する。次に、姿勢角指令値と現在の姿勢角計測値との差が、姿勢角偏差として算出される。演算部92は、姿勢角偏差に応じて操舵角指令値を決定する。更に、操舵角指令値と現在の操舵角計測値の差が、操舵角偏差として算出される。演算部93は、操舵角偏差に応じて操舵角速度指令値を決定する。
【0021】
この操舵角制御を移動体の位置制御として解析すると、姿勢角θや操舵角αが小さく線形近似可能とした場合、姿勢角制御系はガイド線横断方向での基準点位置の速度制御系、操舵角制御系はガイド線横断方向での基準点の加速度制御系と見なすことができる。ただし、ここでの速度および加速度は時間に対する微分値ではなく、基準点のガイド線接線方向の移動距離に対する微分値である。
【0022】
これは、以下の数3で表される。
【0023】
【数3】
従って、この場合の基準点(車体)の軌跡は、走行速度によらず同一となることがわかる。
【0025】
このように、一般的な操舵輪位置制御型操舵角制御方式と新たに提案されている車体位置制御型操舵角制御方式における車輪や移動体の移動軌跡は、走行速度によらず一定のものとなる。ここでは、これらを総称して軌跡一定型操舵角制御方式と呼ぶ。
【0026】
軌跡一定型操舵角制御方式は、ある大きさの制御偏差を修正するために要する時間は走行速度に反比例し、車体横断方向の移動速度が走行速度に比例し、車体横断方向の移動加速度は走行速度の二乗に比例するという特性を持っている。
【0027】
【発明が解決しようとする課題】
無人搬送車のような荷物の搬送を目的とした移動体の場合、操舵角制御性能として要求される性能は、移載位置での停止位置決め精度と、荷崩れを防ぐなめらかな高速走行の2つである。
【0028】
ところが、従来の操舵角制御方式では、移動体や操舵輪の軌跡が走行速度によらず同一となるため、これら2つの要求を同時に満足させることは困難であった。例えば、移動体が移載位置に停止しようとする直前の低速走行区間での位置制御精度が最高になるように制御ゲインを調整すると、高速走行時の応答性が過剰となり不安定な動作となる。一方、高速走行がなめらかになるように制御ゲインを調整した場合には、停止時の停止位置精度が悪化する。
【0029】
そこで、本発明の課題は、あらかじめ定められた経路上を走る移動体に適用される操舵角制御装置であって、高速走行時のなめらかな操舵角操作と、低速走行時の短い走行距離での素早い操舵角操作を実現できる操舵角制御装置を提供することにある。
【0030】
【課題を解決するための手段】
本発明は、操舵輪駆動部によって方向を変えられる操舵輪と、固定輪とを備えた移動体の操舵角制御装置において、移動体にあらかじめ設定された基準点に関して、仮想的ガイド線あるいは物理的ガイド線に対する移動体の相対的な位置を計測する位置計測手段と、前記基準点に関して、仮想的ガイド線あるいは物理的ガイド線に対する移動体の姿勢角を計測する姿勢角計測手段と、前記操舵輪の操舵角を計測する操舵角計測手段と、前記移動体の走行速度を計測して走行速度計測値を出力する速度計測手段と、あらかじめ記憶されている移動体の車輪配置情報と、前記位置計測手段、前記姿勢角計測手段、前記操舵角計測手段、前記速度計測手段の出力とから、操舵角速度指令値を算出し、前記操舵輪駆動部に出力する制御手段とを備え、前記制御手段は、移動体の位置目標値と位置計測値とから算出される位置偏差に基づいて姿勢角指令値を出力し、しかも前記走行速度計測値に応じて第1の制御ゲインを自動的に変更できる第1の制御部と、前記姿勢角指令値と姿勢角計測値とから算出される移動体の姿勢角偏差と前記車輪配置情報とに基づいて操舵角指令値を出力し、しかも前記走行速度計測値に応じて第2の制御ゲインを自動的に変更できる第2の制御部と、前記操舵角指令値と操舵角計測値とから算出される移動体の操舵角偏差に基づいて操舵角速度指令値を出力する第3の制御部とを含み、前記第1の制御部は、前記第1の制御ゲインを前記走行速度計測値に反比例させて自動的に変化させることを特徴とする。
【0032】
また、前記第2の制御部は、前記第2の制御ゲインを走行速度計測値の二乗に反比例させて自動的に変化させることが好ましい。
【0033】
また、前記姿勢角計測手段として、所定の間隔をおいて設置され、前記物理的ガイド線との間の位置偏差を検出するためのガイド線検出器を2つ備えることにより、これら2つのガイド線検出器によって検出された2つの位置偏差値と前記間隔とから姿勢角を算出することができる。
【0034】
【発明の実施の形態】
本発明が適用される移動体は、図2に示すような車輪配置(1つの操舵輪21、2つの固定輪22)でモデル化できる移動体である。このモデルに該当する移動体としては、1つ以上の固定輪と1つの操舵輪を持つシングルステアの移動体、2つの操舵輪が必ず逆相に動作するカウンターステアの移動体、2つの操舵輪が独立に動作するツインステアの移動体などがある。
【0035】
ここでは、図2に示す移動体モデルを例にその作用を説明する。いま、制御しようとする移動体上の代表点を2つの固定輪22の中間位置とし、基準点として定義する。また、移動体の向き(姿勢角θ)は固定輪22の移動方向と同一の方向として定義する。
【0036】
本発明による操舵角制御装置は、計測手段として、従来と同様に、基準点に関してガイド線20に対する移動体の相対的な位置を計測する位置計測手段と、基準点に関してガイド線20に対する移動体の姿勢角θを計測する姿勢角計測手段と、操舵輪21の操舵角を計測する操舵角センサとを備えている。操舵角制御装置は更に、走行速度計測手段を備えている。なお、姿勢角計測手段には、周知のジャイロセンサを用いることができる。このような計測手段は、仮想的なガイド線の場合も同様である。このような計測手段に加えて、あらかじめ記憶されている移動体の車輪配置情報と、走行速度の計測値と、位置計測手段、姿勢角計測手段、操舵角センサの出力とから、操舵角速度指令値を算出し、操舵輪の駆動部に出力する制御装置を備えている。
【0037】
従来の操舵角制御方式では、位置偏差を修正するのに要する走行距離や基準点の軌跡が走行速度によらず一定であった。これは、ガイド線横断方向基準点位置制御系の空間的応答性が一定になるように制御していることによる。
【0038】
これに対して、本操舵角制御装置は、位置偏差を修正するのに要する走行距離が、高速走行時は長く、低速走行時は短くなるように制御するものである。
【0039】
ここでは、上記制御性能を実現する一例として、位置偏差を修正するのに要する時間が走行速度によらず一定となるように制御するものを説明する。
【0040】
図1は、本発明による操舵角制御装置の主要部の構成を示している。この操舵角制御装置は、第1の制御部11を含む位置制御系と、第2の制御部12を含む姿勢角制御系、第3の制御部13を含む操舵角制御系とを含む。
【0041】
本操舵角制御装置ではまず、位置指令値と現在の位置計測値との差を、基準点のガイド線20に対する横断方向位置偏差として算出する。第1の制御部11は、横断方向位置偏差に応じて姿勢角指令値(目標とするガイド線11に対する移動体の向き)を決定する。なお、第1の制御部11で使用する位置制御ゲインG1は、走行速度計測装置13からの走行速度計測値に反比例させて操作する。
【0042】
次に、姿勢角指令値と現在の姿勢角計測値との差を姿勢角偏差として算出する。第2の制御部12には、移動体の車輪配置情報として、図4で説明したホイールベースHがあらかじめ記憶されている。第2の制御部12は、ホイールベースHと姿勢角偏差に応じて操舵角指令値を決定する。なお、第2の制御部12で使用する姿勢角制御ゲインG2は、走行速度計測装置13からの走行速度計測値の二乗に反比例させて操作する。
【0043】
更に、操舵角指令値と現在の操舵角計測値との差を操舵角偏差として算出する。第3の制御部13は、操舵角偏差に応じて操舵角速度指令値を決定する。これにより得られた操舵角速度指令値を、操舵モータの駆動部に入力することによって、操舵角を変更する。
【0044】
姿勢角θや操舵角αが小さく線形近似が可能とすると、この操舵角制御は移動体の位置制御系として以下のように解祈される。
【0045】
基準点のガイド線横断方向の移動速度は、姿勢角θと移動体の走行速度の積となり、走行速度とは比例関係にある。このため、位置制御ゲインG1を走行速度に反比例するように操作することで、位置制御系の時間的応答を走行速度によらず一定とすることができる。
【0046】
基準点のガイド線横断方向の移動加速度は、操舵角αと移動体の走行速度の関数であり、同一操舵角の場合、走行速度を二乗した値と比例関係にある。このため、姿勢角制御ゲインG2を走行速度の二乗に反比例するように操作することで、姿勢角制御系の時間的応答性を走行速度によらず一定にすることができる。
【0047】
上記では、移動体の挙動を基準点のガイド線横断方向の位置制御系としてとらえ、その制御的な応答性を走行速度によらず一定になるように制御する方法を述べたが、以下に示すような他の方法でもよい。
【0048】
位置制御ゲインG1は必ずしも走行速度に反比例させる必要はなく、任意の走行速度の関数として定義しても良い。
【0049】
姿勢角制御ゲインG2は必ずしも走行速度の二乗に反比例させる必要はなく、任意の走行速度の関数として定義しても良い。
【0050】
位置制御ゲインG1、姿勢角制御ゲインG2とも、必ずしも走行速度に応じて連続的に変化させる必要はなく、多段階の不連続な変化でもよい。
【0051】
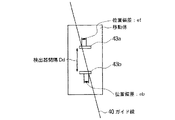
上記の操舵角制御装置が適用可能な位置計測手段の要件は、物理的あるいは仮想的なガイド線に対する移動体の位置と向き(姿勢角)が計測可能であれば良い。従って、平面内での絶対的な移動体の位置と向きが計測可能な、レーザ誘導に代表されるようなガイドレス方式だけでなく、ガイド線に対する相対的な移動体の位置と向きのみ計測可能な図3のようなガイド方式にも適用可能である。
【0052】
図3において、このガイド方式では、移動体に間隔Dd をおいて2つのガイド線検出器43a、43bが備えられ、それぞれ位置偏差ef 、eb が計測される。この場合、姿勢角θは以下の式で算出される。
【0053】
θ=tan-1{(ef +eb )/Dd }
したがって、2つのガイド線検出器43a、43bが姿勢角計測手段を兼ねていることになる。
【0054】
なお、本発明は、無人搬送車、無人フォークリフト、無人ダンプトラック等に適用可能である。
【0055】
【発明の効果】
従来の操舵角制御系の特性は、走行速度によらず移動体の軌跡が同一になるというもので、結果として高速走行時の安定性と高精度な位置決め動作の両立が困難であった。それに対して、本発明の操舵角制御装置では、走行速度によらず位置制御系の時間的な応答性を一定にすることにより、高速走行時には自動的に低ゲインでの制御となることでなめらかな走行を実現する一方、低速走行時には自動的に高ゲインでの制御となることで高精度位置決めを可能とした。
【0056】
これによって、無人搬送車のような荷物を搬送する移動体においては、移載時の停止位置精度の確保と、高速走行中の荷崩れを防止することができる。
【0057】
また、走行速度に応じて自動的に制御ゲインが調整されるため、走行経路の形状や場所に応じて制御系の特性を個別に定義する必要がなく、無人搬送システムを構築する際の設計工数も従来の制御系の場合と同等以下とすることができる。
【図面の簡単な説明】
【図1】本発明による移動体の操舵角制御装置の主要部の構成を示したブロック図である。
【図2】本発明が適用される移動体モデルについて説明するための図である。
【図3】本発明が適用される移動体の他の例の概略構成を示した図である。
【図4】従来の操舵角制御装置を説明するために移動体の概略構成を示した図である。
【図5】図4におけるガイド線と操舵輪及びガイド線検出器の関係を拡大して示した図である。
【図6】従来の操舵角制御装置の主要部の構成を示したブロック図である。
【図7】図6に示された構成要素の機能を説明するための図である。
【図8】従来の操舵輪位置制御型操舵角制御方式の移動体モデルを説明するために移動体の概略構成を示した図である。
【図9】本発明者により提案されている車体位置制御型操舵角制御装置を適用するための移動体の概略構成を示した図である。
【図10】図9の移動体に適用される車体位置制御型操舵角制御装置の主要部の構成を示したブロック図である。
【符号の説明】
20、40、70 ガイド線
21、41、71 操舵輪
22、44、74 固定輪
42、72 スイングアーム
43、73 ガイド線検出器
Claims (3)
- 操舵輪駆動部によって方向を変えられる操舵輪と、固定輪とを備えた移動体の操舵角制御装置において、
移動体にあらかじめ設定された基準点に関して、仮想的ガイド線あるいは物理的ガイド線に対する移動体の相対的な位置を計測する位置計測手段と、
前記基準点に関して、仮想的ガイド線あるいは物理的ガイド線に対する移動体の姿勢角を計測する姿勢角計測手段と、
前記操舵輪の操舵角を計測する操舵角計測手段と、
前記移動体の走行速度を計測して走行速度計測値を出力する速度計測手段と、
あらかじめ記憶されている移動体の車輪配置情報と、前記位置計測手段、前記姿勢角計測手段、前記操舵角計測手段、前記速度計測手段の出力とから、操舵角速度指令値を算出し、前記操舵輪駆動部に出力する制御手段とを備え、
前記制御手段は、
移動体の位置目標値と位置計測値とから算出される位置偏差に基づいて姿勢角指令値を出力し、しかも前記走行速度計測値に応じて第1の制御ゲインを自動的に変更できる第1の制御部と、
前記姿勢角指令値と姿勢角計測値とから算出される移動体の姿勢角偏差と前記車輪配置情報とに基づいて操舵角指令値を出力し、しかも前記走行速度計測値に応じて第2の制御ゲインを自動的に変更できる第2の制御部と、
前記操舵角指令値と操舵角計測値とから算出される移動体の操舵角偏差に基づいて操舵角速度指令値を出力する第3の制御部とを含み、
前記第1の制御部は、前記第1の制御ゲインを前記走行速度計測値に反比例させて自動的に変化させることを特徴とする操舵角制御装置。 - 請求項1に記載の操舵角制御装置において、前記第2の制御部は、前記第2の制御ゲインを走行速度計測値の二乗に反比例させて自動的に変化させることを特徴とする操舵角制御装置。
- 請求項1あるいは2に記載の操舵角制御装置において、前記姿勢角計測手段として、所定の間隔をおいて設置され、前記物理的ガイド線との間の位置偏差を検出するためのガイド線検出器を2つ備え、これら2つのガイド線検出器によって検出された2つの位置偏差値と前記間隔とから姿勢角を算出することを特徴とする操舵角制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP29726098A JP3846829B2 (ja) | 1998-10-19 | 1998-10-19 | 移動体の操舵角制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP29726098A JP3846829B2 (ja) | 1998-10-19 | 1998-10-19 | 移動体の操舵角制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000122722A JP2000122722A (ja) | 2000-04-28 |
| JP3846829B2 true JP3846829B2 (ja) | 2006-11-15 |
Family
ID=17844230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP29726098A Expired - Fee Related JP3846829B2 (ja) | 1998-10-19 | 1998-10-19 | 移動体の操舵角制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3846829B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106843245B (zh) * | 2016-12-01 | 2022-02-01 | 北京京东乾石科技有限公司 | 一种无人机姿态控制方法、装置及无人机 |
| CN112689808A (zh) * | 2018-09-10 | 2021-04-20 | 东京计器株式会社 | 自动转向控制装置 |
-
1998
- 1998-10-19 JP JP29726098A patent/JP3846829B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000122722A (ja) | 2000-04-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106020200B (zh) | 采用轮毂电机驱动的agv小车及路径规划方法 | |
| WO2017158973A1 (ja) | 自動搬送車 | |
| JPH10307030A (ja) | 無人車両のための運動追跡装置 | |
| WO1996015483A1 (en) | Guidance system for vehicle | |
| CN114089730B (zh) | 机器人的运动规划方法和自动引导车 | |
| JPH08171416A (ja) | ホール通路をロボットが移動するための装置と方法 | |
| CN113835425A (zh) | 路径规划方法 | |
| JP2018194937A (ja) | 無人搬送車の走行制御装置および走行制御方法 | |
| JPH075922A (ja) | 無人作業車の操舵制御方法 | |
| JP3846829B2 (ja) | 移動体の操舵角制御装置 | |
| JP3378843B2 (ja) | 無人搬送車の位置および方位の補正装置 | |
| CN113252040B (zh) | 一种改进的agv小车二维码弧线导航方法 | |
| JP3846828B2 (ja) | 移動体の操舵角制御装置 | |
| JP2000153988A (ja) | 無軌道路面走行体およびコンテナターミナル | |
| JP4269170B2 (ja) | 軌道追従制御方法および装置 | |
| JP2622579B2 (ja) | 移動体の誘導方法 | |
| JP2002108453A (ja) | 無人搬送車 | |
| JPH07129243A (ja) | 無人車の操舵制御装置 | |
| KR100199988B1 (ko) | 무인차의 조향방법 및 조향장치 | |
| JP3735897B2 (ja) | 無人車誘導装置 | |
| JPH09185411A (ja) | 無人車の走行方向検出方法 | |
| CN117864167B (zh) | 适于双磁传感的磁钉定位布置方法及agv跟踪控制方法 | |
| JPH07101369B2 (ja) | 自動操舵制御方式 | |
| JPS61139807A (ja) | 無人走行車の走行制御装置 | |
| JP2002041147A (ja) | 搬送台車の制御方法及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060821 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090901 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100901 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110901 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120901 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130901 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |