JP3876193B2 - 電磁式駆動力伝達装置の制御装置 - Google Patents
電磁式駆動力伝達装置の制御装置 Download PDFInfo
- Publication number
- JP3876193B2 JP3876193B2 JP2002179136A JP2002179136A JP3876193B2 JP 3876193 B2 JP3876193 B2 JP 3876193B2 JP 2002179136 A JP2002179136 A JP 2002179136A JP 2002179136 A JP2002179136 A JP 2002179136A JP 3876193 B2 JP3876193 B2 JP 3876193B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- temperature
- current value
- driving force
- reference current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Description
【発明の属する技術分野】
本発明は、コイルに通電される電流値に応じた駆動力を入力軸から出力軸に伝達する電磁式駆動力伝達装置の制御装置に関するものである。
【0002】
【従来の技術】
電磁式駆動力伝達装置の一形式としては、四輪駆動車における後輪側への駆動力伝達経路に設けたものとして、特開2002−48157号公報、特開2002−61677号公報、特開2002−70894号公報が知られている。この電磁式駆動力伝達装置は、図2に示されるように、入力軸が連結されたアウタケース21と、このアウタケース21内に同軸的に配設されて軸線まわりに回転可能に支承され、かつ出力軸が連結されたインナシャフト22を備えている。
【0003】
アウタケース21とインナシャフト22の間にはメインクラッチ機構23およびパイロット機構24が設けられ、これらメインクラッチおよびパイロット機構23,24の間にはパイロット機構24にて発生する作用力をメインクラッチ機構23に伝達して同メインクラッチ機構23を作動させるカム機構25が設けられている。
【0004】
パイロット機構24としては電磁クラッチが採用されており、この電磁クラッチはコイル24a1を備えた電磁石24a、摩擦クラッチ24b、アーマチャ24c、およびヨーク24dから構成されている。かかるパイロット機構24においては、電磁石24aのコイル24a1への通電により、電磁石24aを支持するヨーク24d、アウタケース21の前部側壁、摩擦クラッチ24b、アーマチャ24c、摩擦クラッチ24b、前部側壁及びヨーク24dを循環する磁路が形成される。そして、アーマチャ24cは磁気誘導作用により摩擦クラッチ24b側へ吸引される。この結果、アーマチャ24cは摩擦クラッチ24bを押圧して摩擦係合し、この摩擦係合力によってカム機構25を介してメインクラッチ機構23を作動させ、アウタケース21とインナシャフト22とがトルク伝達可能に連結される。
【0005】
かかるコイル24a1は電磁式駆動力伝達装置の制御装置に接続されており、この制御装置はコイル24a1への通電を制御している。制御装置は中央処理装置を備えている。中央処理装置は駆動回路にPWM信号を出力し、駆動回路はPWM信号のデューティ比に応じたPWM電圧をコイル24a1に印加するようになっている。また、制御装置は、コイル24a1に印加された電圧を検出してその電圧値を中央処理装置に出力する電圧検出装置と、コイル24a1に流れる電流を検出してその電流値を中央処理装置に出力する電流検出装置を備えている。中央処理装置は、電圧検出装置および電流検出装置からそれぞれ入力した電圧値および電流値に基づいてコイル24a1の抵抗値(=電圧値/電流値)を算出する。算出した抵抗値と、基準となる温度と抵抗との相関関係とに基づいてコイル24a1の温度(すなわちアウタケース21内の温度)を算出している。そして、算出したコイルの温度に基づいて温度変化に応じたトルク変動の補正をしている(トルク変動の温度補償制御をしている)。
【0006】
【発明が解決しようとする課題】
上述した電磁式駆動力伝達装置の制御装置においては、コイル24a1に印加されている電圧値およびコイル24a1に流れている電流値を実測して、これら実測結果に基づいてコイル24a1の抵抗値を算出し、算出した抵抗値に基づいてコイルの温度を算出することにより、コイル24a1の温度(すなわちアウタケース21内の温度)を測定している。このため、制御装置には前述した電圧値および電流値をそれぞれ検出するための電圧検出装置および電流検出装置が必要となり、これらの分だけ制御装置のコストが上昇するという問題があった。
【0007】
そこで、本発明は、上述した問題を解消するためになされたもので、コイルに印加されている電圧値を実測することなくコイルの温度を算出することにより、低コストの電磁式駆動力伝達装置の制御装置を提供することを目的とする。
【0008】
【課題を解決するための手段】
上記の課題を解決するため、請求項1に係る発明の構成上の特徴は、通電される電流値に応じた駆動力を入力軸から出力軸に伝達する電磁式駆動力伝達装置のコイルにPWM電圧を印加させる中央処理装置と、該中央処理装置に接続されてコイルに供給される電源電圧値を検出する電圧検出装置と、コイルに通電される実電流値を検出する電流検出装置を備え、車両の走行状態に応じてコイルへの通電電流をデューティ制御することにより車輪間の駆動力配分比を制御する電磁式駆動力伝達装置の制御装置において、電源電圧値とPWM電圧のデューティ比と基準温度時におけるコイルに通電される基準電流値との相関関係を示す基準電流特定手段と、基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す温度特定手段と、基準電流特定手段に基づいて電源電圧値とPWM電圧のデューティ比から基準電流値を求め、温度特定手段に基づいて基準電流値に対する電流検出装置により検出された実電流値の割合からコイルの温度を求める温度算出手段とを備え、温度算出手段で求めたコイルの温度に基づいて伝達トルクを温度補償して制御することである。
【0009】
請求項2に係る発明の構成上の特徴は、基準電流特定手段が、電源電圧値とPWM電圧のデューティ比と基準温度時における基準電流値との相関関係を示す計算式、3次元マップ又は変換テーブルであることである。
【0010】
請求項3に係る発明の構成上の特徴は、温度特定手段が、基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す計算式、2次元マップ又は変換テーブルであることである。
【0014】
【発明の作用・効果】
上記のように構成した請求項1に係る発明において、制御装置は、通電される電流値に応じた駆動力を入力軸から出力軸に伝達する電磁式駆動力伝達装置のコイルにPWM電圧を印加させる中央処理装置と、この中央処理装置に接続されてコイルに供給される電源電圧値を検出する電圧検出装置と、コイルに通電される実電流値を検出する電流検出装置を備えている。制御装置は、さらに、電源電圧値とPWM電圧のデューティ比と基準温度時におけるコイルに通電される基準電流値との相関関係を示す基準電流特定手段と、基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す温度特定手段とを備えている。かかる制御装置は、基準電流特定手段に基づいて電源電圧値とPWM電圧のデューティ比から基準温度時におけるコイルに通電される基準電流値を求めて、温度特定手段に基づいて基準電流値に対する実電流値の割合からコイルの温度を求める。これにより、コイルの温度を算出するにあたっては、中央処理装置に接続された電圧検出装置により検出された電圧値を流用することによりコイルの温度を算出することができるので、従来のごとく専用の電圧検出装置を別に設けることはない。したがって、電磁式駆動力伝達装置の制御装置を低コストにて提供することができる。
【0015】
上記のように構成した請求項2に係る発明においては、基準電流特定手段が、電源電圧値と印加平均電圧値と基準温度時における基準電流値との相関関係を示す計算式、3次元マップ又は変換テーブルであるので、基準電流値を確実かつ容易に算出することができる。
【0016】
上記のように構成した請求項3に係る発明においては、温度特定手段が、基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す計算式、2次元マップ又は変換テーブルであるので、コイルの温度を確実かつ容易に算出することができる。
【0020】
【発明の実施の形態】
以下、本発明による電磁式駆動力伝達装置の制御装置の一実施の形態を適用した四輪駆動車を図面を参照して説明する。図1はこの四輪駆動車と制御装置を概略的に示す図であり、図2は車両に搭載した電磁式駆動力伝達装置を示す断面図である。なお、駆動力伝達装置の主要部は、軸線に対して略対称の構成であるため、図2には、駆動力伝達装置の略半分の部位を示し、他の略半分の部位を省略している。
【0021】
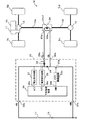
四輪駆動車Mは、図1に示すように、エンジン10により駆動される左右前輪Tf1,Tf2と左右後輪Tr1,Tr2を連結する伝達トルクが変更可能な電磁式駆動力伝達装置20と、この装置の伝達トルクを制御する制御装置30を備えている。エンジン10からの駆動力は、トランスミッションを備えたトランスアクスル11を経てトランスファ12に伝達され、ここで前輪側に分配された駆動力はフロントデファレンシャル(図示省略)を経て左右の前輪Tf1,Tf2に伝達され、また後輪側に分配された駆動力は、第1プロペラシャフト13a、電磁式駆動力伝達装置20、第2プロペラシャフト13bおよびリヤデファレンシャル14を経て左右の後輪Tr1,Tr2に伝達される。
【0022】
電磁式駆動力伝達装置20は、特開2002−48157号公報、特開2002−61677号公報、特開2002−70894号公報に示されるように公知のものであり、図2に示すように、入力軸としての第1プロペラシャフト13aが連結されるアウタケース21と、このアウタケース21内に同軸的に配設されて回転可能に支承され、かつ出力軸としての第2プロペラシャフトが連結されるインナシャフト22を備えている。なお、アウタケース21は、有底筒状のハウジング21aと、ハウジング21aの後端開口部を覆蓋するリヤカバー21bとにより形成されている。インナシャフト22は、ハウジング21aとリヤカバー21bに回転可能に支持されている。
【0023】
アウタケース21とインナシャフト22の間にはメインクラッチ機構23およびパイロット機構24が設けられ、これらメインクラッチおよびパイロット機構23,24の間にはパイロット機構24にて発生する作用力をメインクラッチ機構23に伝達して同メインクラッチ機構23を作動させるカム機構25が設けられている。
【0024】
メインクラッチ機構23は湿式多板式の摩擦クラッチであり、インナシャフト22の外周に組付けられた複数のインナクラッチプレート23aと、ハウジング21aの内周に組付けられた複数のアウタクラッチプレート23bを摩擦係合可能に交互に配置したものである。
【0025】
パイロットクラッチ機構24は、電磁石24a、摩擦クラッチ24b、アーマチャ24c、およびヨーク24dにて構成されている。電磁石24aは環状を呈し、リヤカバー21bの後端部の外周に回転可能に支持された状態で車体側に固定されたヨーク24dに嵌着された状態で、リヤカバー21bの環状凹所21b1に嵌合されている。摩擦クラッチ24bは湿式多板式の摩擦クラッチであり、ハウジング21aの内周に組付けられた複数のアウタクラッチプレート24b1と、後述するカム機構25を構成する第1カム部材25aの外周に組付けられた複数のインナクラッチプレート24b2を摩擦係合可能に交互に配置したものである。アーマチャ24cは環状を呈するもので、ハウジング21aの内周に軸方向に移動可能に組付けられている。
【0026】
カム機構25は、第1カム部材25a、第2カム部材25b、およびカムフォロアー25cにて構成されている。第1カム部材25aは、インナシャフト22の外周に回転可能に嵌合されていて、リヤカバー21bに回転可能に支承されており、その外周に摩擦クラッチ24bのインナクラッチプレート24b2がスプライン嵌合している。第2カム部材25bは、インナシャフト22の外周にスプライン嵌合されて一体回転可能に組付けられていて、メインクラッチ機構23のインナクラッチプレート23aの後側に対向して位置している。第1カム部材25aと第2カム部材25bの互いに対向するカム溝には、ボール状のカムフォロアー25cが介在している。
【0027】
上述した電磁式駆動力伝達装置20の作動を説明する。パイロットクラッチ機構24を構成するコイル24a1が非通電状態にある場合には磁路X(電磁石24aを基点としてヨーク24d、リヤカバー21b、摩擦クラッチ24bおよびアーマチャ24cを循環する磁束が通るループ状の循環磁路)は形成されず、摩擦クラッチ24bは非係合状態にある。このため、パイロットクラッチ機構24は非作動の状態にあって、カム機構25を構成する第1カム部材25aはカムフォロアー25cを介して第2カム部材25bと一体回転可能であり、メインクラッチ機構23は非作動の状態にある。このため、車両は二輪駆動である第1の駆動モードを構成する。
【0028】
一方、コイル24a1への通電がなされると、パイロットクラッチ機構24には磁路Xが形成されて磁力が発生して、電磁石24aはアーマチャ24cを吸引する。このため、アーマチャ24cは摩擦クラッチ24bを押圧して摩擦係合させ、カム機構25の第1カム部材25aをアウタケース21側へ連結させて、第2カム部材25bとの間に相対回転を生じさせる。この結果、カム機構25では、カムフォロアー25cが両カム部材25a,25bを互いに離間する方向へ押圧する。
【0029】
このため、第2カム部材25bはメインクラッチ機構23側へ押動されて、メインクラッチ機構23をハウジング21aの奥壁部とにより押圧して、摩擦クラッチ24bの摩擦係合力に応じて摩擦係合させる。これにより、アウタケース21とインナシャフト22間でのトルク伝達が生じ、車両は第1プロペラシャフト13aと第2プロペラシャフト13bが非直結状態と直結状態間での四輪駆動である第2の駆動モードを構成する。この駆動モードでは、車両の走行状態に応じて、前後輪間の駆動力分配比を100:0(二輪駆動状態)〜50:50(直結状態)の範囲で制御することができる。
【0030】
この第2の駆動モードでは、車輪速センサ、スロットル開度センサ、舵角センサ等各種のセンサからの信号に基づいて、車両の走行状態や路面状態に応じてコイル24a1への通電電流をデューティ制御することにより、摩擦クラッチ24bの摩擦係合力、すなわち、後輪側への伝達トルクを制御される。
【0031】
また、コイル24a1への通電電流を所定の値に高めるとアーマチャ24cに対する吸引力が増大し、アーマチャ24cは強く吸引されて摩擦クラッチ24bの摩擦係合力を増大させ、両カム部材25a,25b間の相対回転を増大させる。この結果、カムフォロアー25cは第2カム部材25bに対する押圧力を高めて、メインクラッチ機構23を結合状態とする。このため、車両は第1プロペラシャフト13aと第2プロペラシャフト13bが直結状態の四輪駆動である第3の駆動モードを構成する。
【0032】
次に、電磁式駆動力伝達装置20の伝達トルクを制御する制御装置30を図1を参照して説明する。制御装置30は、車両に設けた各センサによって検出された車両状態(左右前輪速および左右後輪速、車体の加速度、車体の角速度など)、車両に設けた各スイッチの設定情報(駆動モード(2駆モードまたは4駆モード))などが入力されると、入力した車両状態、各スイッチの設定情報に基づいて電磁式駆動力伝達装置20の伝達トルクを決定し、決定した伝達トルクとなるように電磁式駆動力伝達装置20を構成するコイル24a1への通電を制御するものである。
【0033】
制御装置30は、コイル24a1の両端にそれぞれ接続される電磁式駆動力伝達装置20に設けた入出力端子20a,20bがそれぞれ接続されるSOL+端子30a、SOL−端子30bを備えている。また、制御装置30は、車両に搭載したバッテリ15の+端子がフューズ17を介して接続される+BB端子30cと、接地されたGND端子30eを備えている。なお、GND端子30eはバッテリ15の−端子に接続されている。
【0034】
バッテリ15の+端子に接続された+BB端子30cは、抵抗32を介してSOL+端子30aに接続され、SOL−端子30bは、FET33aを介してバッテリ15の−端子に接続されたGND端子30eに接続されている。これにより、バッテリ15の+端子および−端子がそれぞれコイル24a1の一端および他端に接続される。なお、アノードをSOL−端子30bに接続しカソードを抵抗32の一端に接続したダイオード34が設けられている。
【0035】
中央処理装置36(中央処理装置36のPWM端子36b)は、FET33aを駆動させるFET駆動回路33bに接続されていて、中央処理装置36からは電磁式駆動力伝達装置20の伝達トルクに応じたデューティ比のPWM(Pulse Width Modulation:パルス幅変調)信号が出力されており、FET駆動回路33bはPWM信号に応じたPWM電圧をコイル24a1に印加するようになっている。すなわち、コイル24a1の通電電流はPWM制御により設定された所定の電流値に制御されている。なお、デューティ比とは、所定周期にてハイ・ローを繰り返すパルス信号においてロー信号に対するハイ信号の時間比のことをいい、また、所定周期にてハイ・ローを繰り返すパルス信号のことをPWM信号という。
【0036】
なお、上述したデューティ比は次のように算出される。中央処理装置36は、車両に設けた各センサ(図示省略)によって検出された車両状態(左右前輪速および左右後輪速、車体の加速度、車体の角速度など)、車両に設けた各スイッチ(図示省略)の設定情報(駆動モード(2駆モードまたは4駆モード))などが入力されるようになっている。そして、中央処理装置36は、入力した車両状態、各スイッチの設定情報に基づいて電磁式駆動力伝達装置20の伝達トルクを決定し、この決定した伝達トルクに応じたPWM信号のデューティ比を算出している。
【0037】
また、中央処理装置36(中央処理装置36のA/D端子36c)はバッテリ電圧(電源電圧)をモニタする電圧検出回路37に接続されていて、電圧検出回路37はバッテリ電圧を検出してその電圧値を中央処理装置36に出力している。なお、電圧検出回路37はもともと中央処理装置36に備えられたものであり、この電圧検出回路37により検出された電圧値に基づいて制御装置が正常状態にあるか否かをモニタしている。例えば、検出した電圧値が所定範囲内になければ、制御装置が異常状態にあると判定する。また、中央処理装置36(中央処理装置36のA/D端子36d)は電流検出回路38に接続されていて、電流検出回路38は抵抗32に流れる電流、すなわちコイル24a1に流れる電流を検出してその電流値を中央処理装置36に出力している。
【0038】
なお、本明細書中においては、バッテリ電圧、電源電圧はコイル24a1に供給される供給電圧の一例であり、その供給源としてバッテリ、ツェナダイオードを用いて電圧一定としたものなどが挙げられる。
【0039】
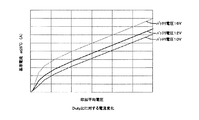
さらに、中央処理装置36は、図3のフローチャートに対応したプログラム、図4に示したコイル24a1の印加平均電圧値とバッテリ電圧値(電源電圧値)と基準電流値との相関関係を示した基準電流特定手段としてのグラフ(3次元マップ)、および図5に示した基準電流値に対する実電流値の比(割合)とコイル24a1の温度との相関関係を示した温度特定手段としてのグラフ(2次元マップ)を記憶している。中央処理装置36は、図3のフローチャートに対応したプログラムを実行して、電圧検出回路37および電流検出回路38によって検出したバッテリ電圧値およびコイル24a1に流れる電流値を入力し、図4に示したグラフ(3次元マップ)に基づいてバッテリ電圧値とデューティ比とからコイル24a1に流れる基準電流値を算出し、図5に示したグラフ(2次元マップ)に基づいて基準電流値に対する実電流値の比(割合)からコイル24a1の温度を算出し、算出した温度に基づいて電磁式駆動力伝達装置20の伝達トルクを温度補償して制御する。
【0040】
なお、図4に示したグラフ(3次元マップ)は、コイル24a1にPWM電圧を印加するとき、バッテリ電圧値と、印加平均電圧値すなわちバッテリ電圧値(コイル24a1に供給される供給電圧値)にPWM電圧のデューティ比を乗じて求めたものと、基準温度時(例えば25℃)におけるコイル24a1に通電される基準電流値との相関関係を示したものである。なお、この3次元マップは実験によって得たデータに基づいて作成されたものである。また、基準電流特定手段は、計算式、変換テーブルであってもよい。いずれの場合も、実験によって得たデータに基づいて作成される。
【0041】
また、図5に示したグラフ(2次元マップ)は、基準電流値に対する実電流値の比(割合)とコイル24a1の温度との相関関係を示したものである。なお、この2次元マップは実験によって得たデータに基づいて作成されたものである。また、温度特定手段は、計算式、変換テーブルであってもよい。いずれの場合も、実験によって得たデータに基づいて作成される。
【0042】
次に、上記のように構成した電磁式駆動力伝達装置20の制御装置30の作動について説明する。中央処理装置36は、イグニッションキー(図示省略)がONされると、上述したように車両状態、各スイッチの設定情報に基づいて電磁式駆動力伝達装置20の伝達トルクを決定し、この決定した伝達トルクに応じたPWM信号のデューティ比を算出している。
【0043】
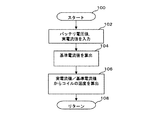
また、中央処理装置36は、図3のプログラムを所定の短時間毎に繰り返し実行する。このプログラムの実行はステップ100にて開始されて、中央処理装置36は、電圧検出回路37および電流検出回路38によって検出したバッテリ電圧値(電源電圧値)およびコイル24a1に流れる電流値(実電流値)を入力する(ステップ102)。そして、ステップ102において、入力したバッテリ電圧値に、中央処理装置36が先に算出したPWM信号(PWM電圧)のデューティ比を乗じて印加平均電圧値を算出する。そして、算出した印加平均電圧値とバッテリ電圧値とから基準電流特定手段としての3次元マップ(図4参照)に基づいて基準電流値を算出する(ステップ104)。
【0044】
中央処理装置36は、ステップ102にて入力した実電流値をステップ104にて算出した基準電流値で除して基準電流値に対する実電流値の比(割合)を算出し、この比から温度特定手段としての2次元マップ(図5参照)に基づいてコイル24a1の温度を算出する(ステップ106)。そして、中央処理装置36は、プログラムをステップ108に進め、プログラムの実行を終了する。
【0045】
なお、中央処理装置36は、算出したコイル24a1の温度に基づいて、電磁式駆動力伝達装置20の伝達トルクの温度補償制御をしている。
【0046】
上述した説明から明らかなように、本実施の形態においては、従来のごとく電圧検出装置を用いてコイルに印加されている電圧値を実測することなく、この代わりにもともと中央処理装置36に備えられている電圧検出回路37を流用してバッテリ電圧値を実測することにより、コイル24a1の温度を算出することができる。したがって、専用の電圧検出回路を別に設けることなく電磁式駆動力伝達装置20の制御装置30を低コストにて提供することができる。また、基準電流特定手段が、電源電圧値と印加平均電圧値と基準温度時における基準電流値との相関関係を示す計算式、3次元マップ又は変換テーブルであるので、基準電流値を確実かつ容易に算出することができる。また、温度特定手段が、基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す計算式、2次元マップ又は変換テーブルであるので、コイルの温度を確実かつ容易に算出することができる。
【0048】
また、本発明を定電圧供給装置(例えば、ツェナダイオードなどを用いた電圧一定となる回路)から一定電圧を供給される電磁式駆動力伝達装置の制御装置に適用することも可能である。これによれば、電圧検出装置(回路)を設ける必要がないので、制御装置を低コストにて提供することができる。
【図面の簡単な説明】
【図1】 本発明に係る電磁式駆動力伝達装置の制御装置の一実施の形態を適用した四輪駆動車を示す全体構成図である。
【図2】 図1に示す電磁式駆動力伝達装置を示す断面図である。
【図3】 図1に示す中央処理装置により実行されるフローチャートである。
【図4】 図1に示す中央処理装置に記憶されて印加平均電圧値とバッテリ電圧値と基準電流値との相関関係を示す3次元マップである。
【図5】 図1に示す中央処理装置に記憶されて基準電流値に対する実電流値の割合とコイルの温度との相関関係を示す2次元マップである。
【符号の説明】
M…四輪駆動車、Tf1,Tf2…左右前輪、Tr1,Tr2…左右後輪、10…エンジン、11…トランスアクスル、12…トランスファ、13a…第1プロペラシャフト、13b…第2プロペラシャフト、14…リヤデファレンシャル、15…バッテリ、17…フューズ、20…電磁式駆動力伝達装置、20a,20b…入出力端子、21…アウタケース、21a…ハウジング、21b…リヤカバー、21b1…環状凹所、22…インナシャフト、23…メインクラッチ機構、23a…インナクラッチプレート、23b…アウタクラッチプレート、24…パイロットクラッチ機構、24a…電磁石、24b…摩擦クラッチ、24b1…アウタクラッチプレート、24b2…インナクラッチプレート、24c…アーマチャ、24d…ヨーク、25…カム機構、25a…第1カム部材、25b…第2カム部材、25c…カムフォロアー、30…制御装置、30a…SOL+端子、30b…SOL−端子、30c…+BB端子、30e…GND端子、32…抵抗、33a…FET、34…ダイオード、36…中央処理装置、33b…FET駆動回路、37…電圧検出回路、38…電流検出回路。
Claims (3)
- 通電される電流値に応じた駆動力を入力軸から出力軸に伝達する電磁式駆動力伝達装置のコイルにPWM電圧を印加させる中央処理装置と、該中央処理装置に接続されて前記コイルに供給される電源電圧値を検出する電圧検出装置と、前記コイルに通電される実電流値を検出する電流検出装置を備え、車両の走行状態に応じて前記コイルへの通電電流をデューティ制御することにより車輪間の駆動力配分比を制御する電磁式駆動力伝達装置の制御装置において、
前記電源電圧値と前記PWM電圧のデューティ比と基準温度時における前記コイルに通電される基準電流値との相関関係を示す基準電流特定手段と、
前記基準電流値に対する前記実電流値の割合と前記コイルの温度との相関関係を示す温度特定手段と、
前記基準電流特定手段に基づいて前記電源電圧値と前記PWM電圧のデューティ比から基準電流値を求め、前記温度特定手段に基づいて前記基準電流値に対する前記電流検出装置により検出された実電流値の割合から前記コイルの温度を求める温度算出手段とを備え、
前記温度算出手段で求めた前記コイルの温度に基づいて伝達トルクを温度補償して制御することを特徴とする電磁式駆動力伝達装置の制御装置。 - 前記基準電流特定手段が、前記電源電圧値と前記PWM電圧のデューティ比と前記基準温度時における基準電流値との相関関係を示す計算式、3次元マップ又は変換テーブルであることを特徴とする請求項1に記載の電磁式駆動力伝達装置の制御装置。
- 前記温度特定手段が、前記基準電流値に対する前記実電流値の割合と前記コイルの温度との相関関係を示す計算式、2次元マップ又は変換テーブルであることを特徴とする請求項1または請求項2に記載の電磁式駆動力伝達装置の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002179136A JP3876193B2 (ja) | 2002-06-19 | 2002-06-19 | 電磁式駆動力伝達装置の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002179136A JP3876193B2 (ja) | 2002-06-19 | 2002-06-19 | 電磁式駆動力伝達装置の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004023967A JP2004023967A (ja) | 2004-01-22 |
| JP3876193B2 true JP3876193B2 (ja) | 2007-01-31 |
Family
ID=31176650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002179136A Expired - Fee Related JP3876193B2 (ja) | 2002-06-19 | 2002-06-19 | 電磁式駆動力伝達装置の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3876193B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010187537A (ja) * | 2010-06-01 | 2010-08-26 | Sharp Corp | モータ駆動装置 |
| JP6174432B2 (ja) * | 2013-03-29 | 2017-08-02 | 日東工器株式会社 | バッテリ式穿孔機 |
| JP5974990B2 (ja) * | 2013-06-28 | 2016-08-23 | トヨタ自動車株式会社 | ソレノイド制御装置 |
| KR102581053B1 (ko) * | 2021-04-28 | 2023-09-20 | 현대로템 주식회사 | Mr댐퍼 온도 측정방법 |
-
2002
- 2002-06-19 JP JP2002179136A patent/JP3876193B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004023967A (ja) | 2004-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1726851B1 (en) | Locking differential with locking state detection system | |
| US6722482B2 (en) | Power transfer device | |
| JP3876193B2 (ja) | 電磁式駆動力伝達装置の制御装置 | |
| WO2011149905A1 (en) | Torque transfer device for a motor vehicle comprising an electromagnetic actuator position control system and method for controlling a respective position control system | |
| JP3256942B2 (ja) | 駆動力伝達装置 | |
| JP2004092570A (ja) | 駆動力伝達制御装置 | |
| US7182712B2 (en) | Method for regulating offset of current detection signal in driving power transmission controller | |
| JP5045280B2 (ja) | 駆動力伝達装置 | |
| CN109421700A (zh) | 驱动力控制装置及车辆的控制方法 | |
| JP4078004B2 (ja) | 電磁クラッチおよびこれを用いた駆動力伝達装置 | |
| JPH1053044A (ja) | 回転伝達装置 | |
| JP3823072B2 (ja) | 前後輪駆動車 | |
| JP2002206566A (ja) | 駆動力伝達制御装置 | |
| JP4042500B2 (ja) | 車両の運動制御装置の異常検出方法および駆動力伝達装置の異常検出方法 | |
| JP2005083464A (ja) | 四輪駆動装置 | |
| JP4192538B2 (ja) | 車両用駆動装置 | |
| JPH1128942A (ja) | 四輪駆動車 | |
| JP7020884B2 (ja) | 電磁式アクチュエータ | |
| JP5076665B2 (ja) | 駆動力伝達装置 | |
| JPH0723624Y2 (ja) | 電磁クラッチ | |
| JP2005028940A (ja) | 駆動力伝達制御装置 | |
| JP2021076208A (ja) | 断続装置 | |
| JP2000234634A (ja) | 電磁クラッチ | |
| JPS61117028U (ja) | ||
| JP2002120589A (ja) | 動力切替装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060228 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060425 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061024 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061030 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131102 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |