JP3965229B2 - アンローダ装置及びその運転方法 - Google Patents
アンローダ装置及びその運転方法 Download PDFInfo
- Publication number
- JP3965229B2 JP3965229B2 JP22163497A JP22163497A JP3965229B2 JP 3965229 B2 JP3965229 B2 JP 3965229B2 JP 22163497 A JP22163497 A JP 22163497A JP 22163497 A JP22163497 A JP 22163497A JP 3965229 B2 JP3965229 B2 JP 3965229B2
- Authority
- JP
- Japan
- Prior art keywords
- hatch
- ship wall
- distance
- distance sensor
- mouth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title description 6
- 238000007790 scraping Methods 0.000 claims description 91
- 238000005259 measurement Methods 0.000 claims description 59
- 230000005855 radiation Effects 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 21
- 230000008602 contraction Effects 0.000 description 7
- 238000012544 monitoring process Methods 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- 101100420946 Caenorhabditis elegans sea-2 gene Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000003610 charcoal Substances 0.000 description 1
- 239000003245 coal Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000008187 granular material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




















Landscapes
- Ship Loading And Unloading (AREA)
Description
【発明の属する技術分野】
本発明は、船舶に積載された積載物、例えば木炭チップや石炭等の粉粒体を陸地に積み出すアンローダ装置に関するものである。
【0002】
【従来の技術】
かかるアンローダ装置は、旋回可能なブームと、ブームの先端部に旋回可能に設けられた掻取り部とを備え、当該掻取り部を船舶のハッチ内に侵入させて掻取り部に設けられた無端状のバケットコンベアを駆動して粉粒体を掻き出して陸地に搬送するものである。このようなアンローダ装置では、ブームの先端部付近に運転室を設け運転室内にオペレータが乗り込んで、オペレータがハッチ口やハッチ内の船壁を目視で確認して操作装置を手動で操作するものがあるが、オペレータの手動運転に頼ることはオペレータの負担が非常に大きく船壁等との衝突の危険をも付きまとうものであった。
【0003】
そこで、オペレータの操作を補助するために操作補助装置を付設したものがある。この操作補助装置としては、例えば、船舶の定点にプリズムを設置し、アンローダ側に設けられた自動追尾型光波距離計によりプリズムを追尾してプリズムとアンローダ側との距離を計測し、この測定された距離と船形データ(例えば、ハッチ口の位置、大きさ、個数やハッチ内の船壁の形状等のデータ)を用いて演算し、アンローダの掻取り部と船壁やハッチ口との相対距離を算出し、アンローダが船壁に異常に接近したときにオペレータにその旨を告知するものがある。
【0004】
【発明が解決しようとする課題】
しかしながら、従来の操作補助装置では、プリズムを船舶側に設置しなければならず、また、船形データを船舶ごとに入手しデータをコンピュータに入力しなければならず、非常に手間と時間がかかるものである。
【0005】
本発明は、上記事情に鑑みてなされたもので、船形データやプリズムを使用しないでも、アンローダの掻取り部とハッチ口や船壁との相対距離を演算することができるアンローダ装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
本発明は、旋回可能なブームと、該ブームの先端に設けられた掻取り部とを備えたアンローダ装置において、前記ブームの先端部付近に設けられハッチ口までの距離を測定するハッチ口計測用距離センサと、該ハッチ口計測用距離センサの出力信号に基づいてハッチ口の形状を演算するハッチ口形状演算手段とを備え、前記ハッチ口計測用距離センサは、該ハッチ口計測用距離センサから前記ブームと直交する方向のハッチ口のエッジ線上の2点A、Bまでの距離を検出する手段と、該ハッチ口計測用距離センサから前記ブームの軸方向のハッチ口のエッジ線上の点Cまでの距離とを検出する手段とを備え、前記ハッチ口形状演算手段は、矩形のハッチ口と平行なx−y平面を仮定し、前記ハッチ口計測用距離センサから前記点A、点Bまでの距離と、前記ハッチ口計測用距離センサから前記点Cまでの距離とに基づいて、ハッチ口のエッジ線上の3点A、B、Cの座標A(x1、y1)、B(x3、y3)、C(x2、y2)を求め、ハッチ口が矩形であることから、x=xmin、y=ymaxの2式を求めることでハッチ口のエッジ線の2辺の位置を演算し、同様にしてハッチ口の他の2辺の位置を演算するものである。
【0008】
前記掻取り部に設けられ船壁までの距離を測定する船壁計測用距離センサと、前記船壁計測用距離センサの出力信号に基づいてハッチ内の船壁の形状を演算する船壁形状演算手段とを更に備え、前記船壁計測用距離センサは、該船壁計測用距離センサから前記掻取り部の前後方向と直交する方向に放射されるレーザー光の放射方向を前記掻取り部の前後方向の軸廻りに回動させて該船壁計測用距離センサから前記掻取り部の側方の船壁までの距離を検出する手段と、該船壁計測用距離センサから前記掻取り部の前方にレーザー光を放射して該船壁計測用距離センサから前記掻取り部の前方の船壁までの距離を検出する手段とを有し、前記船壁形状演算手段は、前記船壁計測用距離センサから船壁に向けて放射角度を変えて放射されたレーザー光の船壁の反射点と該船壁計測用距離センサと間の一群の距離データに基づいて、船壁の3次元形状を演算するものであってもよい。
【0013】
【発明の実施の形態】
以下、本発明の実施の一形態のアンローダ装置を添付図面に基づいて説明する。
【0014】
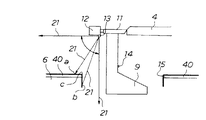
本実施の形態のアンローダ装置は、図1(a)に示すように、岸壁1に沿って走行可能に岸壁1に設けられた走行フレーム3と、この走行フレーム3の上部に旋回可能に取り付けられた旋回基部5と、この旋回基部5から海2に浮んだ船舶6に向けて延びるブーム4と、このブーム4を旋回基部5に支持する支持フレーム8と、ブーム4の先端付近に設けられた保持部11に対して旋回可能に設けられた掻取り部9と、支持フレーム8の反掻取り部9側の端部に設けられたバランスウエイト10と、ブーム4の先端に設けられた運転室12とを備えて概略構成される。
【0015】
掻取り部9としては、周知の構造のものが採用され、例えば複数のバケットを無端状のチェーン(図示せず)に所定間隔を置いて取り付け、当該バケットを掻取り部9の外周に沿って搬送することにより粉粒体である積載物を掻き取って陸側に搬送するようにしたものが採用されている。
【0016】
本アンローダ装置では、ブーム4の先端部付近に設けられた運転室の底部外面にハッチ口計測用距離センサ13が設けられ、掻取り部9の中間部に船壁計測用距離センサ14が設けられている。ハッチ口計測用距離センサ13は、ハッチ口15との距離を測定することにより船舶6のハッチ口15の形状を計測し、船壁計測用距離センサ14は船壁16との距離を測定することによりハッチ15内の船壁16の形状を計測するものである。
【0017】
図1(b)のブロック図に示すように、ハッチ口計測用距離センサ13はハッチ口形状演算手段33に接続され、船壁計測用の距離センサ14は船壁形状演算手段34に接続されている。ハッチ口形状演算手段33及び船壁形状演算手段34はそれぞれ相対位置関係演算手段35に接続されている。この相対位置関係演算手段35には、その演算結果を図示するグラフィック表示装置(例えばCRT装置や液晶ディスプレイ)36が接続されている。ここで、ハッチ口形状演算手段33はハッチ口計測用距離センサ13の距離測定結果に基づきハッチ口15の形状を演算により算出するものであり、船壁形状演算手段34は船壁計測用距離センサ14の距離測定結果に基づき船壁16の形状を演算により算出するものであり、相対位置関係演算手段35は、ハッチ口形状演算手段33又は船壁形状演算手段34の演算結果に基づいて掻取り部9とハッチ口15又は船壁16との相対位置関係を演算するものである。そして、相対位置関係演算手段35は、アンローダ制御装置37と接続されており、相対位置の演算結果に基づき所定距離に近接した場合に衝突を防止するための停止信号を当該アンローダ制御装置37に出力するようになっている。
【0018】
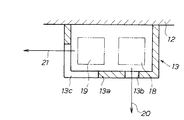
ハッチ口計測用距離センサ13は、図2に示すように、カバー13a内に、ブーム4と直交する方向の距離を計測する側方方向計測手段18と、ブーム4の軸線方向の距離を計測する前方方向計測手段19とを設けて構成される。
【0019】
側方方向計測手段18は、レーザー光を反射するミラー(図示せず)を回転駆動して、ミラーにより反射されたレーザー光を矢印20のようにカバー13aに設けられた窓部13bから外側に放射するようになっている。そして、ミラーの回転によりレーザー光の軌跡はブーム4の軸線に直交するほぼ半円形を描くようになっている(図4参照)。
【0020】
前方方向計測手段19は、側方方向計測手段18とほぼ同様な構成であり、ミラーにより反射されたレーザー光を矢印21のようにカバー13aに設けられた窓部13cから外側に放射するようになっている。そして、ミラーの回転によりレーザー光の軌跡はブーム4の軸線を含んだ垂直面内で半円形を描くようになっている(図5参照)。
【0021】
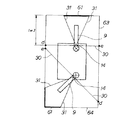
前記船壁計測用距離センサ14は、図3に示すように、カバー14a内に、掻取り部9の側方方向の距離を計測する側方方向計測手段28と、前記掻取り部の前方方向の距離を計測する前方方向計測手段29とを備えて構成される。
【0022】
側方方向計測手段28は、上記ハッチ口計測用距離センサ13と同様に、レーザー光を反射するミラー(図示せず)を回転駆動して、ミラーにより反射されたレーザー光を矢印30のようにカバー14aに設けられた窓部14bから外側に放射するようになっている。そして、ミラーの回転によりレーザー光の軌跡は掻取り部9の前方方向(図6中の矢印A参照)と直交するほぼ半円形を描くようになっている(図6(a)、(c)参照)。
【0023】
前方方向計測手段29は、側方方向計測手段28とほぼ同様な構成であり、ミラーにより反射されたレーザー光を矢印31のようにカバー14aに設けられた窓部14cから外側に放射するようになっている。そして、前方方向計測手段29ではミラーは掻取り部9の前方方向の仮想面上の直交するX軸Y軸にそれぞれ対応して2個設けられており、各ミラーの回転によりレーザー光の軌跡は掻取り部9の前方方向の仮想面と交わった点がX軸方向Y軸方向に平面的に移動するようになっている(図6(a)、(b)参照)。
【0024】
次に、本実施の形態のアンローダ装置の操作方法及び制御動作について、図17及び図18に示すフローチャート、図19〜図24に示すCRT装置の画面表示状況、図7〜図16に示す補助図に基づいて説明する。
【0025】
(1)ホールドデータの入力
まず、アンローダ装置の運転の監視をするために必要なホールドデータをアンローダ装置に搭載されたコンピュータに入力する。オペレータが入力するホールドデータは、図7中で示すハッチカバー40の上面から船底41までの垂直距離Hh及びホッパー部の高さHbである(図17のフローチャート中のステップ1(図中ではS1と記載する。以下同様))。Hhは荷役を行うホールドの底(船底41)と掻取り部9の底面9aとの距離hbを計測するために必要になるものである。距離hbは、下層部掻取り作業時にホッパー部になった旨の警報を出力するために必要となるものであり、距離hbは、図7に示す寸法を用いて、hb=(lh+Hh)−(Lbe+Lα)により算出される。
【0026】
入力されるべき他のホールドデータとしては、ハッチ口計測用距離センサ13からハッチカバー40の上面までの距離lhと、ハッチ口計測用距離センサ13の設置位置から掻取り部9の底面9aまでの距離(Lbe+Lα)とがある。距離lhはハッチ口計測用距離センサ13を用いて実際に測定された測定値がコンピュータに入力される。距離(Lbe+Lα)における距離Lbeは掻取り部9の伸縮が最大ストロークの場合(図中実線で示された掻取り部9)の機械長さを示し、使用するアンローダ装置に対応して予めコンピュータに入力されている。また、距離Lαは任意の伸縮ストロークst(図中点線で示された掻取り部9の場合)に対する保持高さを示し、Lα=α・st+β(α,βは特定のアンローダ装置の固有定数)で計算される。伸縮ストロークstはアンローダ装置の掻取り部9に設けられたセンサ(図示せず)により常時測定され、この測定値に基づいて距離Lαが計算されて自動的にコンピュータに入力される。ちなみに、距離Lαは伸縮最大ストローク時には0である。
【0027】
なお、積載物を掻取り排出する対象となる船舶の船形に関するデータが予めわかっている場合には、オペレータによる入力作業を省略することができる。すなわち、船舶名、ホールド番号に対応してホールドデータを事前に入力・登録しておき、掻取り作業を開始するときに、オペレータが船舶名とホールド番号を入力すると、当該ホールに対応したホールドデータがコンピュータに自動的にロードされる。
【0028】
(2)ハッチ口の位置、寸法の計測
掻取り作業の開始にあたり、まずハッチ口計測用距離センサ13により掻取り作業の対象となるホールドのハッチ口15の位置及び大きさを計測する。
【0029】
本実施の形態のアンローダ装置では、平面視した場合に掻取り部9がハッチ口15のエッジ線の内側にあるときには、ハッチ口15のエッジ線上の3点までの距離と方向との検出ができ、これに基づいて、下記(I )、(II)に示すように、ハッチ口の位置及び大きさを計測・演算することができる。
【0030】
ハッチ口15のエッジ線上の3点は以下のように計測される。図4及び図5に示すようにハッチ口計測用距離センサ13(前方方向計測手段19)からはレーザー光が矢印21の方向に発射され、ハッチカバー40の上面で反射する。ハッチ口計測用距離センサ13(前方方向計測手段19)により反射光を検出して発射から受光までの時間に基づいてハッチ口計測用距離センサ13とハッチカバー40の反射点aまでの距離が検出される。少しレーザー光の発射角度を変えて同様にハッチ口計測用距離センサ13とハッチカバー40の反射点(例えばb点)までの距離を検出する。このようにして得られた一群の距離データに基づきハッチ口15のエッジ点cまでの距離と方向を演算により求めることができる。
【0031】
同様にハッチ口計測用距離センサ13(側方方向計測手段18)から発射角度を変えながらレーザー光を矢印20の方向に発射してハッチ口15の側方のエッジ点d,eまでの距離と方向を求めることができる。
【0032】
本アンローダ装置ではハッチ口の4つのエッジ線を同時に計測することはできないので、海側の1点(以下計測点(1)という。)と陸側の1点(以下計測点(2)という。)との2点でそれぞれエッジ線上の3点までの距離と方向を計測し、矩形であるハッチ口15の4つのエッジ線を演算して、ハッチ口の位置及び大きさを演算する。この演算について以下計測点(1)、(2)に分けて具体的に説明する。
【0033】
(I )計測点(1)の場合
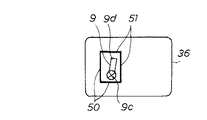
オペレータはアンローダ装置の掻取り部9を計測点(1)に向けて移動させる(ステップ2)。ここで図9に示すように掻取り部9がハッチカバー40の上方に高さL(本実施形態では約2m)に位置するように移動させる。そして、図8に示すように掻取り部9が計測点(1)に到達したら、ハッチ口の検出を開始すべく運転監視開始釦を押す(ステップ3)。これによりハッチ口計測用距離センサ13が作動させられ、ハッチ口のエッジ線上の3点A,B,Cまでの距離と方向が求められる。この結果から、3点A,B,Cの平面上の座標A(x1,y1)、B(x3,y3)、C(x2,y2)を演算により求める。ハッチ口15は矩形であるので、x=xmin、y=ymaxの2式を求めることでハッチ口のエッジ線の2辺の位置を演算することができる。図19に示すように、掻取り部9に対する2辺50をCRTの画面に表示する(ステップ4)。図8に示すようにハッチ口15のエッジ線が基準軸x,yに平行とすると、x=xmin=x1、y=ymax=y2又はy3となる。この際、辺50を表示するとともに掻取り部9の投影図形を表示することによりこれらの相対位置関係をビジュアルに表示する。
【0034】
ここで、掻取り部9のハッチ口15のエッジ線に対する向きによっては2辺50の演算ができず表示をすることができない場合があるので、オペレータはハッチ口の2辺が表示されたかどうかをCRT装置で確認し(ステップ5)、2辺の表示がされていない場合には、2辺が表示されるまで掻取り部9を多少旋回させる等の位置変更を行う(ステップ6)。
【0035】
そして、2辺が表示されたら、オペレータはアンローダ装置の掻取り部9を計測点(2)に向けて移動させる(ステップ7)。この際、図9、図11に示すように掻取り部9がハッチカバー40の上方に高さLを保持したまま移動させる。
【0036】
(II)計測点(2)の場合
図10に示すように掻取り部9が計測点(2)に到達したら、ハッチ口計測用距離センサ13が作動させられ、ハッチ口のエッジ線上の3点D,E,Fまでの距離と方向が求められる。この結果から、3点D,E,Fの平面上の座標D(x4,y4)、E(x5,y5)、F(x6,y6)を演算により求める。x=xmax、y=yminの2式を求めることでハッチ口のエッジ線の他の2辺の位置を演算する。図20に示すように、掻取り部9に対する他の2辺51をCRTの画面に表示する(ステップ8)。他の2辺51を表示するとともに前ステップで表示された2辺50を延長して他の辺51と交差させてハッチ口15のエッジ線を対応する四角形を表示させる。ここで図10に示すようにハッチ口15のエッジ線が基準軸x,yに平行とすると、x=xmax=x6、y=ymin=y4となる。
【0037】
計測点(1)の場合と同様に、掻取り部9のハッチ口15のエッジ線に対する向きによっては他の2辺51の演算ができず表示をすることができない場合があるので、オペレータはハッチ口の他の2辺51が表示されたかどうかをCRT装置で確認し、他の2辺51の表示がされていない場合には、2辺が表示されるまで掻取り部9を多少旋回させる等の位置変更を行う(ステップ9)。
【0038】
図21に示すように、CRT装置に4辺50,51の表示とともに掻取り部9の投影図形を常時表示する。これにより、オペレータはハッチ口と掻取り部9との相対位置関係をビジュアルに確認することができる。
【0039】
他の2辺51が表示されたら、オペレータはその後自動でハッチ口を追尾するかどうかを判断する(ステップ10)。自動で追尾を行うと判断した場合にはハッチ口追尾釦を押す(ステップ11)。
【0040】
(3)掻取り部とハッチ口、船底までの距離の表示
ハッチ口追尾釦が押されると、掻取り部9を平面視した場合のその前面部9c、後端部9dとハッチ口15の各辺50,51までの距離及び掻取り部9の前面部9c、後端部9dと船底41までの距離を演算してCRT装置にデジタル表示する(ステップ12)。なお、4辺50,51が表示された後はハッチ口計測用距離センサ13による距離計測は行わず、演算された辺50,51の式に基づいて演算により4辺50,52との距離を算出するようにしている。
【0041】
ここで、掻取り部9の横行や旋回によってハッチ口15との相対位置は漸次変わるので、ハッチ口15までの距離の表示を漸次更新して表示する。また、掻取り部9の伸縮ストロークstの変化によって掻取り部9の底部9aから船底41までの距離も変化するので、ストロークセンサ等による計測データに基づいて船底41までの距離の表示も漸次更新して表示する。さらに、掻取り部9の伸縮ストロークstを変えることにより投影図形が伸縮するので、ストロークセンサ等による計測データに基づいてCRT装置上の投影図形を伸縮表示させるとともに、伸縮後の後端部9dから4辺50,51との距離の表示の漸次更新して表示する。
【0042】
(4)船壁表示開始判定
上記のようにオペレータはCRT装置の画面を見ながら積載物の掻き出しを行うためにアンローダ装置を操作しその掻取り部9をホールド内に侵入させる(ステップ13)。ここで、船壁計測用距離センサ14は常時計測を行っているが、掻取り部9がホールド内に深く侵入して船壁計測用距離センサ14が船壁16と対峙するまでは、測定対象物が計測範囲にないので、船壁16の位置、形状等は演算することができない。そこで、図22に示すようにCRT装置の画面上にはハッチ口15と掻取り部9とを示す図形を表示するとともに、『船壁計測不能』の文字を表示する(ステップ14)。
【0043】
船壁計測用距離センサ14が船壁16と対峙したら、船壁計測用距離センサ14によりホールドの船壁16の位置を計測する。この計測方法は上記ハッチ口計測用距離センサ13の場合とほぼ同様である。
【0044】
すなわち、図12に示すように、船壁計測用距離センサ14(前方方向計測手段29)からはレーザー光が矢印31(図3参照)の方向に発射され、ホールドの船壁16で反射する。船壁計測用距離センサ14(前方方向計測手段19)により反射光を検出して発射から受光までの時間に基づいて船壁計測用距離センサ14と船壁16の反射点aまでの距離が検出される。少しレーザー光の発射角度を変えて同様に船壁計測用距離センサ14と船壁16の反射点(例えばb点)までの距離を検出する。レーザ光の発射角度は掻取り部9の前方方向の仮想面と交わった点がX軸方向Y軸方向に平面的に移動するように変化させているので、このようにして得られた一群の距離データに基づき船壁16の3次元形状を演算することができる。
【0045】
同様に船壁計測用距離センサ14(側方方向計測手段28)から発射角度を変えながらレーザー光を矢印30(図3参照)の方向に発射して掻取り部9の側方に位置する船壁16の点d,e(図13参照)までの距離を演算する。
【0046】
このように演算された船壁16の形状等のデータに基づいて船壁16をCRT装置に掻取り部9の投影図形とともに表示する(ステップ15)。この表示方法についてはホールドの上層部、中層部、下層部で異なる。以下のそれぞれの場合について説明する。
【0047】
(5)上層部の掻取り作業時における船壁表示(ステップ16)
船壁計測用距離センサ14は掻取り部9の前方及び側方の計測のみを行い後方の計測を行わないので、掻取り部9がホールド内の所定深さまで侵入して旋回可能となるまでは前方及び側方の3つの船壁を示し後方の壁面は表示しない。
【0048】
ホールドの上層部の掻取り作業では、図12に示すように、船壁16の垂直部分は積載物17によって覆われて隠れているので、露出した船壁部分の表示を行う。すなわち、図13に示すように、船壁の形状の演算結果により得られた船壁のデータで最も高い位置(水平距離lw1の位置)を連ねた線を点線62で示す。また、距離の最も遠い位置(水平距離lw2の位置)を実線61で示す。また、掻取り部9の側方では水平距離の最も長い位置を点d,eで示す。CRT装置では、船壁16はハッチ口と同じく平面視ほぼ矩形であるので、実線61と点d,eを通る3辺63を表示する。
【0049】
掻取り部9に掻取り作業が進むにつれて船壁16の露出部分が拡大するので、船壁16の垂直部分を計測するまでは、最も遠い位置までの距離lw2は増大するので、計測・演算されたデータに基づいて最も遠い位置を示す線61,62を漸次外側に拡大表示する。
【0050】
(6)中層部の掻取り作業時における船壁表示(ステップ17)
上層部の場合と同様に船壁計測用距離センサ14により船壁の計測を行い、CRT装置に船壁を掻取り部9の投影図形とともに表示する。中層部の掻取りでは図14に示すように、船壁の垂直部分の一部は露出し、a点、b点までの計測距離の差がほとんどなくなるので、点線62に相当する表示は行わない。また、掻取り部9は、図5に示すように、ホールド内で旋回できるので掻取り部9を旋回させてその周りの位置する船壁16を全周にわたって計測することができる。したがって、図23に示すように船壁に対応する線63の他に線64を表示する。
【0051】
オペレータは表示されたハッチ口を示す線50,51及び船壁を示す線63,64と掻取り部9の投影図形の表示を見れば、これらの相対位置関係をビジュアルに確認することができる。目視に基づく運転操作にCRT装置の確認を併用すれば運転操作の負担が大幅に軽減される。
【0052】
また、前記ステップ16及びステップ17においては、本実施の形態のアンローダでは、掻取り部9とハッチ口15、船壁16とが衝突しそうになると、ステップ20において自動的にアンローダの運転を停止する信号が発せられるようになっている。
【0053】
(7)下層部の掻取り作業時における船壁表示
中層部の掻取り作業が進みホールドのホッパ部16aに達するが、ホッパ部16aは積載物17の下に隠れていて、ホッパ部16aの計測ができない。そこでハッチ口計測用距離センサ13及びアンローダ装置のストロークセンサ等の検出結果から演算された、掻取り部9の底部9aと船底41と距離hbが、予め入力されたホッパ部16aの高さHbに達したときに、ホッパ部高さになった旨をオペレータに警告を発する(ステップ18)。この警告はブザーによる警告音を発するとともに、図24に示すようにCRT装置に『ホッパ部掻取り中』の表示を行う。警告及び表示によりオペレータは船壁16の底部が狭まっていることを考慮して、掻取り部9とホッパ部とが衝突しないように運転操作をして、下層部の掻取り作業を行う(ステップ19)。
【0054】
【発明の効果】
以上説明したように本発明のアンローダ装置では、船形データやプリズムを使用しないでも、アンローダの掻取り部とハッチ口や船壁との相対距離を演算することができる。
【図面の簡単な説明】
【図1】(a)は本発明の実施の一形態のアンローダ装置を示す概略構成図であり、(b)は同アンローダ装置の運転を監視するための装置を示すブロック図である。
【図2】図1のアンローダ装置に使用されるハッチ口計測用距離センサの概略を示す図である。
【図3】図1のアンローダ装置に使用される船壁計測用距離センサの概略を示す図である。
【図4】図1のアンローダ装置のハッチ口計測用距離センサの作用を示す平面図である。
【図5】図4の側面図である。
【図6】図1のアンローダ装置の船壁計測用距離センサの作用を示す図である。
【図7】運転監視を行うためのホールドデータの入力について説明するための補助図である。
【図8】計測点(1)におけるハッチ口の位置、寸法の計測について説明するための補助図である。
【図9】図8の側面図である。
【図10】計測点(2)におけるハッチ口の位置、寸法の計測について説明するための補助図である。
【図11】図10の側面図である。
【図12】ホールドの上層部における掻取り作業中の状態を示す補助図である。
【図13】ホールドの上層部の掻取り作業時のCRT装置の表示方法を示す補助図である。
【図14】ホールドの中層部における掻取り作業中の状態を示す補助図である。
【図15】ホールドの中層部の掻取り作業時のCRT装置の表示方法を示す補助図である。
【図16】ホールドの下層部の掻取り作業時を示す補助図である。
【図17】図1のアンローダ装置における動作を示すフローチャートである。
【図18】図1のアンローダ装置における動作を示すフローチャートである。
【図19】CRT装置のイメージを示す図である。
【図20】CRT装置のイメージを示す図である。
【図21】CRT装置のイメージを示す図である。
【図22】CRT装置のイメージを示す図である。
【図23】CRT装置のイメージを示す図である。
【図24】CRT装置のイメージを示す図である。
【符号の説明】
4 ブーム
9 掻取り部
13 ハッチ口計測用距離センサ
14 船壁計測用距離センサ
18 側方方向計測手段(ハッチ口計測用距離センサ)
19 前方方向計測手段(ハッチ口計測用距離センサ)
28 側方方向計測手段(船壁計測用距離センサ)
29 前方方向計測手段(船壁計測用距離センサ)
33 ハッチ口形状演算手段
34 船壁形状演算手段
35 相対位置関係演算手段
36 グラフィック表示装置
37 アンローダ制御装置
Claims (2)
- 旋回可能なブームと、該ブームの先端に設けられた掻取り部とを備えたアンローダ装置において、
前記ブームの先端部付近に設けられハッチ口までの距離を測定するハッチ口計測用距離センサと、該ハッチ口計測用距離センサの出力信号に基づいてハッチ口の形状を演算するハッチ口形状演算手段とを備え、
前記ハッチ口計測用距離センサは、該ハッチ口計測用距離センサから前記ブームと直交する方向のハッチ口のエッジ線上の2点A、Bまでの距離を検出する手段と、該ハッチ口計測用距離センサから前記ブームの軸方向のハッチ口のエッジ線上の点Cまでの距離を検出する手段とを備え、
前記ハッチ口形状演算手段は、矩形のハッチ口と平行なx−y平面を仮定し、前記ハッチ口計測用距離センサから前記点A、点Bまでの距離と、前記ハッチ口計測用距離センサから前記点Cまでの距離とに基づいて、ハッチ口のエッジ線上の3点A、B、Cの座標A(x1、y1)、B(x3、y3)、C(x2、y2)を求め、ハッチ口が矩形であることから、x=xmin、y=ymaxの2式を求めることでハッチ口のエッジ線の2辺の位置を演算し、同様にしてハッチ口の他の2辺の位置を演算するものであることを特徴とするアンローダ装置。 - 前記掻取り部に設けられ船壁までの距離を測定する船壁計測用距離センサと、前記船壁計測用距離センサの出力信号に基づいてハッチ内の船壁の形状を演算する船壁形状演算手段とを更に備え、
前記船壁計測用距離センサは、該船壁計測用距離センサから前記掻取り部の前後方向と直交する方向に放射されるレーザー光の放射方向を前記掻取り部の前後方向の軸廻りに回動させて該船壁計測用距離センサから前記掻取り部の側方の船壁までの距離を検出する手段と、該船壁計測用距離センサから前記掻取り部の前方にレーザー光を放射して該船壁計測用距離センサから前記掻取り部の前方の船壁までの距離を検出する手段とを有し、
前記船壁形状演算手段は、前記船壁計測用距離センサから船壁に向けて放射角度を変えて放射されたレーザー光の船壁の反射点と該船壁計測用距離センサと間の一群の距離データに基づいて、船壁の3次元形状を演算するものである請求項1に記載のアンローダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP22163497A JP3965229B2 (ja) | 1997-08-18 | 1997-08-18 | アンローダ装置及びその運転方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP22163497A JP3965229B2 (ja) | 1997-08-18 | 1997-08-18 | アンローダ装置及びその運転方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1159918A JPH1159918A (ja) | 1999-03-02 |
| JP3965229B2 true JP3965229B2 (ja) | 2007-08-29 |
Family
ID=16769853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP22163497A Expired - Fee Related JP3965229B2 (ja) | 1997-08-18 | 1997-08-18 | アンローダ装置及びその運転方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3965229B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6441008B2 (ja) * | 2014-09-19 | 2018-12-19 | Ihi運搬機械株式会社 | グラブバケット式アンローダの運転支援装置 |
| CN111328318B (zh) * | 2018-02-02 | 2022-01-07 | 株式会社Ihi | 卸载装置 |
| JP7129314B2 (ja) * | 2018-02-02 | 2022-09-01 | 株式会社Ihi | 荷揚げ装置 |
| JP7011480B2 (ja) * | 2018-02-02 | 2022-01-26 | 株式会社Ihi | 荷揚げ装置 |
| JP7237703B2 (ja) * | 2019-04-09 | 2023-03-13 | 株式会社Ihi | 荷揚げ装置 |
| JP7285122B2 (ja) * | 2019-04-09 | 2023-06-01 | 株式会社Ihi | 形状導出装置 |
| JP7285121B2 (ja) * | 2019-04-09 | 2023-06-01 | 株式会社Ihi | 荷揚げ装置 |
| WO2020209135A1 (ja) * | 2019-04-09 | 2020-10-15 | 株式会社Ihi | 形状導出装置および荷揚げ装置 |
| JP7237702B2 (ja) * | 2019-04-09 | 2023-03-13 | 株式会社Ihi | 荷揚げ装置 |
| JP7520752B2 (ja) * | 2021-03-04 | 2024-07-23 | 株式会社Ihi | 荷揚げ装置および荷揚げ装置のための制御装置 |
| JP7818425B2 (ja) * | 2022-03-09 | 2026-02-20 | 住友重機械搬送システム株式会社 | 貨物室検出装置、貨物室検出方法、貨物室検出プログラム |
-
1997
- 1997-08-18 JP JP22163497A patent/JP3965229B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1159918A (ja) | 1999-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3965229B2 (ja) | アンローダ装置及びその運転方法 | |
| FI115678B (fi) | Järjestely kaivosajoneuvon törmäyksenestoon | |
| BR0110567B1 (pt) | aparelho de roda de pá deslocável e processo para comando automático do aparelho de roda de pá. | |
| JP2907386B1 (ja) | 連続アンローダの相対位置計測装置 | |
| JP2002211747A (ja) | コンベヤ装置 | |
| TW201936475A (zh) | 卸載裝置 | |
| JPH09297023A (ja) | アンローダの掘削部と船体との相対位置計測装置 | |
| JP4175727B2 (ja) | 自由断面掘削機に於ける掘削ブームの俯仰角及び旋回角検出方法 | |
| JP2573175Y2 (ja) | アンローダと船の相対位置検出装置 | |
| JP2887198B2 (ja) | 相対位置計測装置 | |
| JP4043086B2 (ja) | アンローダ設備 | |
| JP2022155992A (ja) | 構造検出装置、構造検出方法、構造検出プログラム、荷下ろし装置 | |
| JP2711620B2 (ja) | 移動車両の自動走行装置 | |
| JP2704918B2 (ja) | 船舶用荷役機械の制御装置 | |
| JP7520752B2 (ja) | 荷揚げ装置および荷揚げ装置のための制御装置 | |
| JP2001019168A (ja) | 連続アンローダの運転支援装置 | |
| JP7804492B2 (ja) | 荷下ろし装置、荷下ろし装置の制御方法、荷下ろし装置の制御プログラム | |
| JP2025127262A (ja) | 荷揚げ機械、荷揚げ方法、記憶媒体 | |
| TWI845180B (zh) | 卸貨裝置、卸貨裝置的控制方法、卸貨裝置的控制程式、控制系統 | |
| JP2000282789A (ja) | 自由断面掘削機に於ける切削ドラムのnc制御精度確認方法 | |
| JP4043156B2 (ja) | アンローダ設備 | |
| JP2709867B2 (ja) | 連続式アンローダにおける船側位置検出装置 | |
| JP2025127263A (ja) | キャリブレーション装置、キャリブレーション方法、記憶媒体 | |
| JPH11171349A (ja) | 連続式アンローダ自動運転における船舶揺動時の退避方法および退避制御装置 | |
| JPH03195904A (ja) | 運搬船内に積載された積載物の体積測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040628 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20050929 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20051102 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061107 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070528 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100601 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100601 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100601 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100601 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110601 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120601 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120601 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130601 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |