JP4002107B2 - 画像認識装置及びプログラム - Google Patents
画像認識装置及びプログラム Download PDFInfo
- Publication number
- JP4002107B2 JP4002107B2 JP2002008324A JP2002008324A JP4002107B2 JP 4002107 B2 JP4002107 B2 JP 4002107B2 JP 2002008324 A JP2002008324 A JP 2002008324A JP 2002008324 A JP2002008324 A JP 2002008324A JP 4002107 B2 JP4002107 B2 JP 4002107B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- distance
- correction
- camera
- template
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
Description
【発明の属する技術分野】
本発明は、1台のカメラでX軸方向の補正とY軸方向の補正のみならず、Z軸方向の補正(距離の補正)やZ軸まわり回転角(ここでは、θ3と呼ぶ)の補正も行うことができる画像認識装置及びプログラムに関する。
【0002】
【従来の技術】
従来、プリント基板(回路基板)の自動チェック(検査)や部品の実装等のためには、ロボットハンドが、水平なステージ上に固定されたプリント基板内の特定部位の直上に移動し、プローブピン等を繰り出して電気的な測定や部品の実装をする装置等では、ロボットのハンドを正確に制御する必要がある。
【0003】
このようなロボットのハンドの正確な位置決め精度が十分確保できないケースが多く、何らかの補正が必要となる。このため、多く用いられている方法は、ロボットのハンド等に取り付けたカメラで捉えた画像を使って、何らかの画像認識を行って、その認識結果が、本来の位置からどれだけズレているかを計算し、それに対応した量だけハンドを調整(補正)する方法である。チェックする回路基板が固定されるステージの面をXY平面とすると、この補正は、X軸方向の補正とY軸方向の補正の2つで構成されるものであった。
【0004】
従来の画像認識では、ある画像のどの部分が他の画像のどの部分に対応するかを求める処理が必要となる。こうした処理は、パターンマッチング(pattern matching)と呼ばれ、画像間のマッチングや図形間のマッチングがある。ある特定の対象物に対応するパターンが画像中のどこに存在するかを調べ、対象物を認識することもマッチングの問題となる。特に対象物のパターンが画像として表現され、そのパターンと対象画像の各部分との類似度を調べることによって、対象物の位置を求める操作は、テンプレートマッチング(template matching )と呼ばれ、画像処理におけるマッチングの最も基本的でよく用いられる手法となっている。
【0005】
図13は従来例の説明図である。図13において、従来のテンプレートマッチングの説明であり、テンプレート▲1▼と画像Aが設けてある。テンプレートマッチングは、検出しようとする対象を表すテンプレート▲1▼を画像A中の点(i,j )にその中心が重なるようにし、テンプレート▲1▼とそれと重なる画像の部分パターンとの類似度を測り、その値を点(i,j )に対象が存在する確からしさとする方法である。対象物の位置を求めるには、この操作を画像のすべての点(画素)に対して施し、類似度が最大となる位置を求めるものであった。
【0006】
【発明が解決しようとする課題】
上記従来のものは、ハンドのZ軸方向の誤差とZ軸まわり回転角(θ3)が無視できない場合は、従来の補正では不十分であった。この2つの補正のためには、カメラを2台取り付け、2つの画像を使って補正することは可能であるが、カメラが2台必要であることや、ハンドが大きくなる、重くなる等の問題があった。
【0007】
本発明は、1台のカメラでZ軸方向の補正(距離の補正)やZ軸まわり回転角(θ3)の補正も行うことを目的とする。
【0008】
【課題を解決するための手段】
図1は本発明の画像認識装置の説明図である。図1中、1aは認識対象物、2はカメラ、4はプローブ、10は制御部、11aは駆動手段、13aは画像認識手段、16aは格納手段である。
【0009】
本発明は、前記従来の課題を解決するため次のような手段を有する。
【0012】
(1):認識対象物1aを撮影するカメラ2と、前記認識対象物1a用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段16aと、前記カメラ2の画像と前記テンプレートでパターンマッチングを行う画像認識手段13aとを備え、前記画像認識手段13aは、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離とを比較し、前記カメラ2と前記認識対象物1a間の距離の誤差を計算し、該誤差を距離の補正値とする。このため、1枚の画像で回転角の補正量と距離の補正値を求めることができる。
【0013】
(2):前記(1)の画像認識装置において、前記画像認識手段13aは、前記回転角の補正量の補正又は前記距離の補正値の補正を行った後、該補正後の特徴点の位置と位置データより決まる特徴点の位置の補正を行う。このため、1枚の画像で回転角の誤差や距離の誤差を無くしてXY軸方向の補正をするので、カメラを備えるハンド等の補正を容易にかつ正確に行うことができる。
【0014】
【発明の実施の形態】
本発明は、1台のカメラを使用し、画像認識を使って、X軸方向とY軸方向の補正のみならず、Z軸方向の補正(距離の補正)やZ軸まわり回転角(θ3)の補正も行うものである。
【0015】
(1):画像認識装置の説明
図1は画像認識装置の説明図である。図1において、認識対象物1aは、電子部品が搭載されたプリント基板のICリード等である。カメラ2は、ロボットハンド等に取り付けられ認識対象物1aの画像を得るものである。プローブ4は、ロボットハンド等に取り付けられて認識対象物1aの検査を行うものである。制御部10は、画像認識装置全体の制御を行うものである。駆動手段11aは、ロボットハンドを駆動するX軸、Y軸、Z軸、Z軸回転(θ3)等の4つの駆動部からなるものである。他にも必要に応じて、ハンドのX軸回転(θ1)、Y軸回転(θ2)等を備えるがここでは簡単のため含めない。画像認識手段13aは、パターンマッチング等の処理を行うものである。格納部16aは、カメラ2の画像に相当するCADデータ(位置データ)やテンプレートの明暗(濃淡)データ等を格納するものである。以下、基板の自動チェック装置に適用した画像認識装置について説明する。
【0016】
(2):基板の自動チェックの説明
▲1▼:基板の自動チェック装置構成の説明
図2は基板の自動チェック装置構成の説明図である。図2において、基板の自動チェック装置には、プリント基板1、カメラ2、ハンド(ロボットハンド)3、プローブ4、プローブピン5、ステージ6、モータx、モータy、モータz、モータθ3が設けてある。プリント基板1は、電子部品が搭載されたチェック対象物である。カメラ2は、ハンド3に取り付けられてプリント基板1の画像を得るものである。ハンド3は、プリント基板の自動チェックのためモータにより駆動されるものである。プローブ4は、ハンド3に取り付けられてプリント基板1のチェックを行うものである。プローブピン5は、プリント基板1のコンタクト点と接触してチェックを行うものである。ステージ6は、チェック装置を搭載する基台である。モータxは、ハンド3をX軸方向に移動する駆動手段である。モータyは、ハンド3をY軸(紙面に垂直)方向に移動する駆動手段である。モータzは、ハンド3をZ軸方向に移動する駆動手段である。モータθ3は、ハンド3をZ軸方向の回転移動を行うための駆動手段である。
【0017】
なお、図2では、簡単のため、ハンド3が1個の例であるが、通常は複数(一般的には4個程度)のハンド3が搭載され、同時にプリント基板1の異なるポイントを測定することになる。
【0018】
▲2▼:基板の自動チェック装置の制御ブロックの説明
図3は基板の自動チェック装置の制御ブロックの説明図である。基板自動チェック装置の制御ブロックには、制御部10、モータ群駆動部11、カメラ制御部12、画像認識部13、補正量計算部14、計測部15、測定ポイントデータ格納部16が設けてある。
【0019】
制御部10は、全体の制御を行うものである。モータ群駆動部11は、1つのハンドを動かすのに必要なモータ全ての駆動部を示している。例えば、X軸、Y軸、Z軸、Z軸回転(θ3)の4つのモータ駆動部からなる。カメラ制御部12は、プリント基板1の画像を撮影するカメラ2の制御を行うものである。画像認識部13は、カメラの画像とテンプレートとでパターンマッチングを行い画像認識を行う画像認識手段である。補正量計算部14は、画像認識結果からハンドの補正量を計算するものである。計測部15は、例えばデジタルサンプリングオシロスコープ等で、電圧や電気的波形等を計測するものである。測定ポイントデータ格納部16は、プリント基板(測定対象物)1の測定ポイントをプローブピン5でコンタクトして測定するための場所の座標値の集合、もしくは、座標値に変換可能なデータの集合(プリント基板1のCADデータ)等を格納するものである。
【0020】
▲3▼:Z軸回転(θ3)が必要となるケースの説明
簡単なケースでは、θ3のモータを省略して、X、Y、Z軸の3つのモータだけで任意の点のコンタクトは可能である。しかし、次のようなケースを考えるとθ3のモータが必要となる。
【0021】
1)プリント基板1の取り付け時にθ3軸まわりの誤差がある場合、ハンドをθ3回転することでプリント基板1のX、Y軸とカメラ画像のX、Y軸を合わせる(この場合は、画像変換で回転補正をかければ対応できるので、θ3のモータは必須とはいえない)。
【0022】
2)プリント基板1上の障害物をよけるため、プローブピン5を傾斜させた状態でコンタクトする場合。この場合は、予め傾斜させた向きが障害物のある向きと同じ場合、θ3回転を行うことで障害物をよけることが可能となる。
【0023】
図4はプローブピンを傾斜させる説明図であり、図4(a)はプローブピンを傾斜させない場合の説明、図4(b)はプローブピンを傾斜させ回転させる場合の説明である。図4(a)において、プリント基板1の上にハードディスク等の大型部品7が搭載されている場合、コンタクトしたい点にプローブ4を傾斜させないでコンタクトしようとすると、プローブ4の一部が干渉する。このため、図4(b)のように、プローブピン5を予め傾斜させた状態で、ハンド3をθ3回転を行うことで、図の左右のプローブ4のように大型部品7とプローブ4の干渉を防ぐことができる。
【0024】
3)複数ハンドで同時測定を行う場合、コンタクト点が近接していると、ハンド同士がぶつかる危険がある。この場合に、ハンド回転させることで衝突を回避できる場合がある。
【0025】
4)ハンドにプローブピンとグランドピンの2つのピンを持たせる場合。仮に、プローブピン先端がθ3軸に一致している場合、グランドピンをプローブピンから所定量移動するモータと、θ3モータを正しく動かせば、プローブピンとグランドピンの両方が正しくコンタクトできる。
【0026】
(3):特徴点の位置の割り出し(XY補正)の説明
▲1▼:一つのテンプレートを使用する場合の説明
図5は1つのテンプレートを使用する場合の説明図である。図5において、画像Aとテンプレート▲1▼が設けてある。画像Aは、プリント基板1のカメラの画像であり、周囲にリードを持つIC画像aが示されている。IC画像aは、周囲にリード(一部のリードを省略)を持ち、このリードはプリント基板上のパットと接続されるものである。テンプレート▲1▼は、パターンマッチングに使用するため予め格納されているデータ(ここではリードパターンの一部のデータ)である。
【0027】
(パターンマッチングの説明)
パターンマッチングは、CADデータにより、テンプレート▲1▼に相当する画像部分(図2のステージ6に固定されたプリント基板1の画像部分)のだいたいの位置が予めわかっているため誤差がなければパターンが一致すると思われる位置を中心にし、その位置からテンプレートを前後左右に移動して行う。図6は画像認識処理フローである。以下、図6の処理S1〜S3に従って説明する。
【0028】
S1:画像認識部13の格納手段等にテンプレート▲1▼のデータを設定する。このデータは、2次元の明暗を表すデータである。
【0029】
S2:画像認識部13は、テンプレート▲1▼とカメラ画像の回路基板とのパターンマッチングを行い類似度を求める。この動作をテンプレート▲1▼を1ピクセル分動かす毎に繰り返して、2次元の類似度マトリックスを作成する。なお、このテンプレート▲1▼を動かす範囲は位置ズレ誤差をカバーする範囲とする。動かす単位は通常1ピクセル単位である。
【0030】
S3:画像認識部13は、作成した類似度マトリックスの中から最大類似度の位置の画素を割り出し、マッチング位置とする。
【0031】
▲2▼:複数のテンプレートを使用する場合の説明
図7は2つのテンプレートを使用する場合の説明図である。図7において、画像Aとテンプレート▲1▼、▲2▼が設けてある。画像Aは、カメラの画像であり、周囲にリード(一部のリードを省略)を持つIC画像aと2個のVIA(ビア)bが示されている。テンプレート▲1▼、▲2▼は、パターンマッチングに使用するため予め格納されているデータ(ここでは、VIAとリードパターンの一部のデータ)である。なお、VIAは、中心にVIAホール(多層プリント基板の層間を接続するための穴(黒丸で示す))を持つものである。また、ここではテンプレート▲1▼、▲2▼を同時に示してあるが、通常、画像認識部13の格納手段等に別々に格納されるものである。
【0032】
(パターンマッチングの説明)
パターンマッチングでは、CADデータによりテンプレートに相当する画像部分のだいたいの位置が予めわかっているため、プリント基板に位置決め誤差がなければパターンが一致すると思われる位置を中心にし、その位置からテンプレートを前後左右に移動して行う。図8は画像認識処理フローである。以下、図8の処理S11〜S15に従って説明する。
【0033】
S11:画像認識部13の格納手段等に、VIA用のテンプレート▲1▼とリードパターン用のテンプレート▲2▼の明暗データを設定する。
【0034】
S12:画像認識部13は、先ず、VIA用のテンプレート▲1▼とカメラ画像の回路基板(テンプレート▲1▼に相当する部分のだいたいの位置が予めわかっているため誤差がなければパターンが一致すると思われる位置を中心とする領域で)とのパターンマッチングを行い類似度を求める動作と、テンプレート▲1▼を1ピクセル(画素)動かす動作を繰り返し、類似度マトリックスを作成する。なお、このテンプレート▲1▼を動かす範囲は位置ズレ範囲を考えて適当に設定する。
【0035】
S13:画像認識部13は、次に、リードパターン用のテンプレート▲2▼を使用して、テンプレート▲1▼と同様に1ピクセルづつ動かしてパターンマッチングを行い類似度を求める(テンプレート▲2▼を使用した類似度マトリックスを作成する)。この動かす範囲はテンプレート▲1▼と同じ範囲(誤差がなければパターンが一致すると思われる位置を中心として)で行う。
【0036】
S14:画像認識部13は、次に、テンプレート▲1▼を使用して得られた類似度とテンプレート▲2▼を使用して得られた類似度とを各位置(同じ移動距離)で加算(テンプレート▲1▼とテンプレート▲2▼を使用して作成した類似度マトリックスを加算し、加算した類似度マトリックスを作成)する。
【0037】
S15:画像認識部13は、前記加算した類似度マトリックスの中から最大類似度の位置の画素を割り出し、マッチング位置とする。
【0038】
図9は類似度加算の説明図であり、図9(a)はテンプレート▲1▼の類似度マトリックスの説明、図9(b)はテンプレート▲2▼の類似度マトリックスの説明、図9(c)はテンプレート▲1▼とテンプレート▲2▼を加算した類似度マトリックスの説明である。
【0039】
図9(a)のテンプレート▲1▼で得られた類似度マトリックスと図9(b)のテンプレート▲2▼で得られた類似度マトリックスとを加算したものが図9(c)の類似度マトリックスである。例えば、図9(a)と図9(b)の中心の類似度がそれぞれ「18」と「20」であるので、図9(c)では中心の類似度が「38」となる。
【0040】
図9(c)において、類似度が最も高いのは「51」であり、この位置は中心(CADデータの位置)より1ピクセル分右斜め上となる。このように、複数のテンプレートを用いることで、画像のノイズ等の影響を受けにくく、認識精度が高まる。
【0041】
なお、テンプレート▲1▼とテンプレート▲2▼は、パターンの全く違うものの組み合わせを使用すると認識誤差をさらに少なくする(誤差が出やすい方向が異なるケースがあるため)ことが期待できる。また、テンプレート▲1▼とテンプレート▲2▼を合わせたような大きなテンプレートを用いることも考えられるが、保存に必要なプログラムが多く(テンプレートの数も増える)なり、パターンマッチングの処理量も増加するため現実的ではない。
【0042】
なお、上記実施の形態では、テンプレートを1〜2を使用する説明をしたが、3以上使用することにより画像位置の認識結果をより向上することがきる。更に、パターンマッチングに類似度を用いたが、距離を用いることもできる。距離は、類似度とは逆に類似度が高いほど小さく(短く)なる。
【0043】
(4):画像認識を使ったZ補正(距離の補正)とθ3補正の説明
1台のカメラでX軸方向の補正(X補正)とY軸方向の補正(Y補正)のみならず、Z軸方向の補正(距離の補正(Z補正))やZ軸まわり回転角(θ3)の補正も行うものである。
【0044】
ハンドを所定の位置に移動したところで、カメラに写っているであろう2つの特徴点の位置を割り出す。この割り出しには、前記で説明した1つの点の位置の割り出しを使用する。例えば、カメラの画像上の右半分と左半分からそれぞれ1点づつ選ぶ。ここで特徴点とは、画像認識が可能なものを指している。例えば、プリント基板上のVIAやICのリード接続用のパッド(フットパッド)等である。
【0045】
2つの特徴点a、bのそれぞれの本来の座標を
a=(x1,y1)、b=(x2,y2)とする。
【0046】
パターンマッチングを行って画像認識した結果の2つの特徴点A、Bの座標を
A=(X1,Y1)=(x1+δx1,y1+δy1)
B=(X2,Y2)=(x2+δx2,y2+δy2)
とし、以下、画像認識部13が行うZ補正とθ3補正の具体的処理手順を説明する。
【0047】
▲1▼:回転角(θ3)の補正の説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果から回転角の補正量を求めるものである。
【0048】
回転角の誤差δθ3 は、ベクトルの外積を使って
【0049】
【数1】

図10は回転角(θ3)の補正の説明図である。図10において、線分a、bと線分A、Bとがつくる角度がδθ3 となる。これにより、ロボットのハンドのXY方向の誤差と高さの誤差を「0」とすると、ハンドのθ3(カメラの光軸回りの回転角)を、ここで求まったδθ3 だけ回すと、画像上の点A、Bに見えていたものは、逆方向に回り、それぞれ、点a、bに見えることになる。即ち、δθ3 の回転によりθ3が補正され、正確な値となったことになる。
【0051】
▲2▼:高さ(距離)の補正の説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果から認識対象物までの距離の補正量を求めるものである。
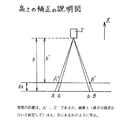
【0052】
図11は高さの補正の説明図である。図11において、カメラ2と対象物までの設計上の高さをhとし、実際の高さをh’、その誤差をδh=h−h’とすると、ハンドの高さを+δh補正することで、ハンド(取り付けられているカメラ)は正しい高さhに移動することになる。
【0053】
【数2】
カメラと対象物までの距離(設計値)をh、実際の距離をh’、その誤差をδh=h−h’とすると、
【0055】
【数3】
▲3▼:高さ(距離)の補正と回転角の補正の説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果から回転角の補正量と認識対象物までの距離の補正量を求めるものである。
【0057】
上記▲1▼と▲2▼で説明した回転角(θ3)の補正と高さ(距離)の補正は、組み合わせて行うことができる。
【0058】
【数4】
これらの回転角の誤差δθ3 と高さの誤差δhの補正を行い、回転角と高さの両者を正確にすることができる。
【0060】
▲4▼:XY補正と回転角補正の説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果からXY補正量と回転角の補正量を求めるものである。
【0061】
(1) 上記▲1▼で説明した回転角(θ3)の補正の方式で回転角の誤差δθ3 を求める(図12(a)参照)。
【0062】
(2) 次に、カメラの画像に、−δθ3 の回転処理をほどこす。この時、点A、Bが、点A’、B’に移動したとする(図12(b)参照)。
【0063】
【数5】
なお、(2) の替わりに、次の (2)’の処理を行ってもよい。
【0065】
(2)’ハンドに+δθ3 の回転をほどこす。その後、再度カメラの画像を取得し直し、画像認識もやり直し、その認識結果の点をA’、B’とする。
【0066】
図12はXY補正と回転角補正の説明図であり、図12(a)はδθ3 の説明である。図12(a)において、画像認識の結果の点A、Bによる線分ABと本来(設計上)の点a、bによる線分abとがつくる角がδθ3 となる(上記(1) 参照)。
【0067】
図12(b)は回転処理後の説明である。図12(b)において、画像に−δθ3 の回転処理又はハンドに+δθ3 の回転をほどこした時の点A’、B’である(上記(2) 又は(2) ’参照)。
【0068】
【数6】
▲5▼:XY補正と高さ補正の説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果からXY補正量と高さ(距離)の補正量を求めるものである。
【0070】
(1) 上記▲2▼で説明した高さの補正の方式で高さの誤差δhを求める。
【0071】
(2) 次に、カメラの画像に対して、(h−δh)/h倍の拡大(若しくは縮小)処理を行う。ここで、点A、Bの変換(処理)後の点をA’、B’とする。
【0072】
【数7】
なお、上記(2) の替わりに、次の (2)’の処理を行ってもよい。
【0074】
(2)’ハンドをδhだけZ軸方向に移動する。移動後、あらためてカメラの画像を取得、画像認識をやり直し、その認識結果の点をA’、B’とする。その後、前記▲4▼と同様にXYの補正を行う。
【0075】
▲6▼:XY補正、回転角補正、高さ補正を同時に行う説明
1枚の画像上の異なる2つの領域で別々に画像認識を行い、その結果からXY補正量、回転角の補正量、高さ(距離)の補正量を求めるものである。
【0076】
(1) 上記▲3▼で説明した高さの補正と回転角の補正の方式で高さの誤差δh、回転角の誤差δθ3 を求める。
【0077】
(2) 次に、カメラの画像に対して、上記▲4▼の(2) で説明した−δθ3 の回転処理と、上記▲5▼の(2) で説明した(h−δh)/h倍の拡大(若しくは縮小)処理を行う。ここで、点A、Bの変換(処理)後の点をA’、B’とする。
【0078】
【数8】
なお、上記(2) の替わりに、次の (2)’の処理を行ってもよい。
【0080】
(2)’ハンドをδhだけZ軸方向に移動し、回転角もδθ3 補正する。その後、カメラの画像を取得と画像認識をやり直し、その認識結果の点をA’、B’とする。その後、前記▲4▼と同様にXYの補正を行う。
【0081】
また、回転角補正、高さ補正、XY補正を求めるやり方は次のように行うこともできる。
【0082】
(1) 最初のカメラの画像を使って、回転角、高さ、XとYの補正量を計算する(これらの4つの計算順序はどのような順番でも構わない)。
【0083】
(2) その後、XY補正量に対して、回転角の誤差分の変換を行って、最終的なXY補正量を求める。
【0084】
(3) その後、メカ(ハンド)に対して回転角、高さ、XY成分(2成分)の補正を行う(これらの4つの補正順序はどのような順番でも構わない)。
【0085】
(5):プログラムインストールの説明
制御部10、モータ群駆動部11、駆動手段11a、カメラ制御部12、画像認識部13、画像認識手段13a、補正量計算部14、計測部15、測定ポイントデータ格納部16、格納手段16a等は、プログラムで構成でき、主制御部(CPU)が実行するものであり、主記憶に格納されているものである。このプログラムは、一般的な、コンピュータで処理されるものである。このコンピュータは、主制御部、主記憶、ファイル装置、表示装置、キーボード等の入力手段である入力装置などのハードウェアで構成されている。
【0086】
このコンピュータに、本発明のプログラムをインストールする。このインストールは、フロッピィ、光磁気ディスク等の可搬型の記録(記憶)媒体に、これらのプログラムを記憶させておき、コンピュータが備えている記録媒体に対して、アクセスするためのドライブ装置を介して、或いは、LAN等のネットワークを介して、コンピュータに設けられたファイル装置にインストールされる。そして、このファイル装置から処理に必要なプログラムステップを主記憶に読み出し、主制御部が実行するものである。
【0087】
〔以下付記を記載する〕
(付記1) 認識対象物を撮影するカメラと、
前記認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
前記カメラの画像と前記テンプレートでパターンマッチングを行う画像認識手段とを備え、
前記画像認識手段は、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすることを特徴とした画像認識装置。
【0088】
(付記2) 認識対象物を撮影するカメラと、
前記認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
前記カメラの画像と前記テンプレートでパターンマッチングを行う画像認識手段とを備え、
前記画像認識手段は、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とすることを特徴とした画像認識装置。
【0089】
(付記3) 認識対象物を撮影するカメラと、
前記認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
前記カメラの画像と前記テンプレートでパターンマッチングを行う画像認識手段とを備え、
前記画像認識手段は、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とすることを特徴とした画像認識装置。
【0090】
(付記4) 前記画像認識手段は、前記回転角の補正量の補正又は前記距離の補正値の補正を行った後、該補正後の特徴点の位置と位置データより決まる特徴点の位置の補正を行うことを特徴とした付記1〜3のいずれかに記載の画像認識装置。
【0091】
(付記5) 認識対象物用のテンプレートとカメラの画像中の認識対象物の位置データとを格納する格納手段と、
1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とする画像認識手段として、
コンピュータを機能させるためのプログラム又はプログラムを記録したコンピュータ読取可能な記録媒体。
【0092】
(付記6) 認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とする画像認識手段として、
コンピュータを機能させるためのプログラム又はプログラムを記録したコンピュータ読取可能な記録媒体。
【0093】
(付記7) 認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とする画像認識手段として、
コンピュータを機能させるためのプログラム又はプログラムを記録したコンピュータ読取可能な記録媒体。
【0094】
(付記8) 前記回転角の補正量の補正又は前記距離の補正値の補正を行った後、該補正後の特徴点の位置と位置データより決まる特徴点の位置の補正を行う前記画像認識手段として、
付記5〜7のいずれかに記載のコンピュータを機能させるためのプログラム又は付記5〜7のいずれかに記載のプログラムを記録したコンピュータ読取可能な記録媒体。
【0095】
【発明の効果】
以上説明したように、本発明によれば次のような効果がある。
【0098】
(1):画像認識手段で、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離とを比較し、該比較した距離が等しくなるようにカメラと認識対象物間の距離を移動し、該移動した距離を距離の補正値とするため、1枚の画像で回転角の補正量と距離の補正値を容易に求めることができる。
【0099】
(2):画像認識手段は、回転角の補正量の補正又は距離の補正値の補正を行った後、該補正後の特徴点の位置と位置データより決まる特徴点の位置の補正を行うため、1枚の画像で回転角の誤差や距離の誤差を無くしてXY軸方向の補正をするので、カメラを備えるハンド等の補正を容易にかつ正確に行うことができる。
【0100】
(3):認識対象物用のテンプレートとカメラの画像中の認識対象物の位置データとを格納する格納手段と、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とする画像認識手段として、コンピュータを機能させるためのプログラムとするため、このプログラムをコンピュータにインストールすることで、1枚の画像で回転角の補正量と距離の補正値を容易に求めることができる画像認識装置を容易に提供することができる。
【図面の簡単な説明】
【図1】本発明の画像認識装置の説明図である。
【図2】実施の形態における基板の自動チェック装置構成の説明図である。
【図3】実施の形態における基板の自動チェック装置の制御ブロックの説明図である。
【図4】実施の形態におけるプローブピンを傾斜させる説明図である。
【図5】実施の形態における1つのテンプレートを使用する場合の説明図である。
【図6】実施の形態における画像認識処理フローである。
【図7】実施の形態における2つのテンプレートを使用する場合の説明図である。
【図8】実施の形態における画像認識処理フローである。
【図9】実施の形態における類似度加算の説明図である。
【図10】実施の形態における回転角(θ3)の補正の説明図である。
【図11】実施の形態における高さの補正の説明図である。
【図12】実施の形態におけるXY補正と回転角補正の説明図である。
【図13】従来例の説明図である。
【符号の説明】
1a 認識対象物
2 カメラ
4 プローブ
10 制御部
11a 駆動手段
13a 画像認識手段
16a 格納手段
Claims (3)
- 認識対象物を撮影するカメラと、
前記認識対象物用のテンプレートと前記カメラの画像中の認識対象物の位置データとを格納する格納手段と、
前記カメラの画像と前記テンプレートでパターンマッチングを行う画像認識手段とを備え、
前記画像認識手段は、1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とすることを特徴とした画像認識装置。 - 前記画像認識手段は、前記回転角の補正量の補正又は前記距離の補正値の補正を行った後、該補正後の特徴点の位置と位置データより決まる特徴点の位置の補正を行うことを特徴とした請求項1記載の画像認識装置。
- 認識対象物用のテンプレートとカメラの画像中の認識対象物の位置データとを格納する格納手段と、
1枚の画像上で異なる2つの領域でパターンマッチングを行い、それぞれの領域で特徴点の位置を割り出し、該割り出した2つの特徴点を通る直線と位置データより決まる前記2つの特徴点を通る直線とのなす角度を求め、該求めた角度を回転角の補正量とすると共に、該割り出した前記2つの特徴点間の距離と位置データより決まる前記2つの特徴点間の距離から、前記カメラと前記認識対象物間の距離の誤差を計算し、該誤差を距離の補正値とする画像認識手段として、
コンピュータを機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002008324A JP4002107B2 (ja) | 2002-01-17 | 2002-01-17 | 画像認識装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002008324A JP4002107B2 (ja) | 2002-01-17 | 2002-01-17 | 画像認識装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003208616A JP2003208616A (ja) | 2003-07-25 |
| JP4002107B2 true JP4002107B2 (ja) | 2007-10-31 |
Family
ID=27646619
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002008324A Expired - Fee Related JP4002107B2 (ja) | 2002-01-17 | 2002-01-17 | 画像認識装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4002107B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010003376B4 (de) * | 2009-03-30 | 2021-04-01 | Koh Young Technology Inc. | Untersuchungsverfahren |
| CN110211183B (zh) * | 2019-06-13 | 2022-10-21 | 广州番禺职业技术学院 | 基于单次成像大视场led透镜贴装的多目标定位系统 |
-
2002
- 2002-01-17 JP JP2002008324A patent/JP4002107B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003208616A (ja) | 2003-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6396942B1 (en) | Method and apparatus for locating ball grid array packages from two-dimensional image data | |
| US6771808B1 (en) | System and method for registering patterns transformed in six degrees of freedom using machine vision | |
| US6363168B1 (en) | Measurement position determination on a semiconductor wafer | |
| US6496270B1 (en) | Method and system for automatically generating reference height data for use in a three-dimensional inspection system | |
| JP4571763B2 (ja) | 画像処理装置、およびボンディング装置 | |
| CN112419406B (zh) | 物体检测装置以及物体检测用计算机程序产品 | |
| CN109213090B (zh) | 位置控制系统、位置检测装置及记录介质 | |
| JP2003536252A (ja) | オンヘッド式ラインスキャン感知を備えた配置機械のための較正方法 | |
| US11826919B2 (en) | Work coordinate generation device | |
| JP4088232B2 (ja) | ボンディング方法、ボンディング装置及びボンディングプログラム | |
| JP4128513B2 (ja) | ボンディング用パターン識別方法、ボンディング用パターン識別装置及びボンディング用パターン識別プログラム | |
| JP4002107B2 (ja) | 画像認識装置及びプログラム | |
| JP4015423B2 (ja) | 画像認識装置及びプログラム | |
| Nevliudov et al. | Automated System Development for the Printed Circuit Boards Optical Inspection Using Machine Learning Methods | |
| JP4097255B2 (ja) | パターンマッチング装置、パターンマッチング方法およびプログラム | |
| JP4077195B2 (ja) | 画像認識装置及びプログラム | |
| JP3325120B2 (ja) | 部品認識方法及び装置 | |
| JP2003208623A (ja) | 画像認識装置及びプログラム | |
| JPH116711A (ja) | 計測用撮像装置の校正値測定方法 | |
| CN114372963B (zh) | 使用一段可利用圆弧生成pcb板参考点的方法 | |
| JP3579247B2 (ja) | パターンの位置合わせ方法 | |
| CN111862196A (zh) | 检测平板物体的通孔的方法、装置和计算机可读存储介质 | |
| JPH10117100A (ja) | 部品の位置検出方法 | |
| CN119359822B (zh) | 对准相机和量测相机的相对位置标定方法及相关装置 | |
| WO2022224645A1 (ja) | データ作成システム、及び、実装システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070814 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070816 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100824 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110824 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120824 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120824 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130824 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |