JP4033704B2 - 自動追尾式スキャニングソナー - Google Patents
自動追尾式スキャニングソナー Download PDFInfo
- Publication number
- JP4033704B2 JP4033704B2 JP2002122527A JP2002122527A JP4033704B2 JP 4033704 B2 JP4033704 B2 JP 4033704B2 JP 2002122527 A JP2002122527 A JP 2002122527A JP 2002122527 A JP2002122527 A JP 2002122527A JP 4033704 B2 JP4033704 B2 JP 4033704B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- automatic tracking
- echo signal
- echo
- horizontal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/96—Sonar systems specially adapted for specific applications for locating fish
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/66—Sonar tracking systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
【発明の属する技術分野】
本発明は、魚群等の標的を自動追尾する機能を備えたスキャニングソナーに関する。
【0002】
【従来の技術】
スキャニングソナーは、所定のティルト角度をもった超音波ビームを水中の全方位へ送信し、水平方向のスキャンによって水中の標的からのエコー信号を検出して、当該エコーに基づいて標的の映像を表示する水中探知装置である。図12は、スキャニングソナーの原理を示した図である。図において、50は船舶51に搭載されたスキャニングソナー、52はスキャニングソナー50に備えられた送受波器、53は送受波器52から発射された超音波ビーム、54は水面である。超音波ビーム53は、送受波器52から水中の全方位へ向けて所定のティルト角(俯角)δで一斉に発射され、円錐形の送信ビームを形成する。ビーム送信後、送受波器52を円周方向に走査して、水中を水平方向(矢印方向)に高速でスパイラル状にスキャンする受信ビーム57を形成し、魚群や水底等で反射したエコーを受信する。そして、受信したエコー信号の強度に応じて、魚群や水底等のカラー映像が画面に表示される。
【0003】
ところで、漁撈においては、魚群の位置(自船との距離、方向、深さ)を知るだけでなく、網を的確に仕掛けるために、魚群の移動方向や移動速度を知ることが重要である。このため、ユーザーが標的と定めた魚群を自動的に追尾する機能を備えたスキャニングソナーが実用化されている。図13は、このような自動追尾式スキャニングソナーの画面60の一例を示しており、61は画面60に表示された自船位置のマーク、62は魚群のエコーを表す映像、63は魚群62を自動追尾するために投入されたターゲットロックマークである。このターゲットロックマーク63は、図示しない操作部を操作することにより、画面60上の所定の位置に表示されるようになっている。
【0004】
自動追尾を行うには、図13(a)のように、追尾しようとする魚群62の位置にターゲットロックマーク63を投入する。自動追尾が開始されると、スキャニングソナーは、自船61の移動ベクトルとターゲットロックマーク63の位置とに基づいて、超音波ビームの中心がマーク63の位置を向くように、送受波器のティルト角度を調整し、ビームを発射する。そして、水中で反射して得られるエコーをスキャンして受信し、マーク位置近傍のエコー信号から魚群の位置を検出して、この位置を新たなターゲットロックマーク63の位置とする。このような動作を繰り返すことによって自動追尾が行われ、図13(b)、(c)のように、時間の経過とともに魚群62の移動軌跡64が画面60上に表示されてゆく。
【0005】
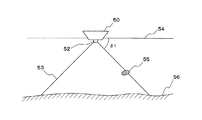
図14は、あるティルト角度δ1で送受信された超音波ビーム53に対して、魚群55が検出された場合を示しており、このとき魚群55の位置はティルト角度δ1の円錐面上にある。なお、56は水底を表している。図15に示すように、魚群55が移動すると、超音波ビーム53が魚群55に向くようにティルト角度δ1がδ2に自動的に調整され、自動追尾が行われる。
【0006】
【発明が解決しようとする課題】
しかしながら、従来の装置においては、超音波ビームを水平方向のみにスキャンしているだけなので、標的がビーム領域外に移動してしまうと、標的を捕捉できなくなって自動追尾が不可能となる。説明を簡単にするために、自船と魚群間の水平距離および方位は一定とし、魚群が上下に移動する場合を考える。図14において、魚群55の位置が上下に移動しても、魚群55が超音波ビーム53の幅内にあれば追尾位置は変わらず、ティルト角度もδ1のまま変化しない。ところが、図16に示すように、魚群55が超音波ビーム53の幅外に移動してしまった場合、水平スキャンだけでは魚群55の深度がわからないため、ティルト角度δ1を魚群55の移動に合わせて制御できなくなる。この結果、魚群55を捕捉することができなくなり、画面に魚群の映像が表示されなくなって、自動追尾が不能となる。
【0007】
本発明は、上記問題点を解決するものであって、その第1の課題は、標的の移動に合わせてティルト角度を正確に制御することで、自動追尾を確実に行うことができるスキャニングソナーを提供することにある。
【0008】
本発明の第2の課題は、水底付近の底付き魚群を自動追尾する場合に、魚群のエコーを水底のエコーと明確に分離することにより、誤って水底を追尾してしまうことのないスキャニングソナーを提供することにある。
【0009】
本発明の第3の課題は、泡切れ等が原因で一時的に自動追尾が不能となっても、エコーが受信されると自動的に追尾を再開できるスキャニングソナーを提供することにある。
【0010】
【課題を解決するための手段】
上記第1の課題を解決するために、本発明に係る自動追尾式スキャニングソナーでは、水平方向のスキャン(以下、「水平スキャン」という)に加えて、所定の水平方位において垂直方向のスキャン(以下、「垂直スキャン」という)を行う。水平スキャンは、水平面から所定のティルト角度を持った円錐面上にビームを形成することで、その円錐面上の標的からのエコー信号を検出するものである。一方、垂直スキャンは、ある水平方位の垂直断面上に水平スキャン時のビームとは別のビームを形成することで、その垂直断面上の標的からのエコー信号を検出するものである。垂直スキャンを行うと、エコー信号から標的の深度を検出できるので、標的が上下方向に移動しても、深度情報に基づいてティルト角度を制御することで、標的の移動に合わせて水平スキャンのティルト角度を追従させることが可能となり、これによって自動追尾を確実に行うことができる。
【0011】
水平スキャンと垂直スキャンとは、交互に行ってもよいし、並行して行ってもよい。水平スキャンと垂直スキャンを交互に行った場合は、相互間での信号のクロストークを抑制することができる。また、水平スキャンと垂直スキャンを並行して行った場合は、ティルト制御の応答性を向上させることができる。
【0012】
次に、上記第2の課題を解決するために、本発明に係る自動追尾式スキャニングソナーでは、水平方向および垂直方向のスキャンによって得られるエコー信号のうち、水底のエコー信号と標的のエコー信号とを判別し、標的のエコー信号に基づいて標的の予測位置を算出する。そして、この予測位置に基づいて自動追尾を行うようにしている。これにより、水底付近にいる魚群を自動追尾する場合に、魚群のエコーと水底のエコーとが隣接あるいは連続していても、両者を区別して魚群だけを正確に追尾することができ、誤って水底を追尾してしまうことがなくなる。
【0013】
水底のエコー信号と標的のエコー信号は、信号レベルに対して閾値を設定することで判別することができる。すなわち、エコー信号のレベルが閾値を超える場合は水底のエコー信号と判別し、エコー信号のレベルが閾値以下である場合は標的のエコー信号と判別する。また、閾値の設定にあたっては、たとえば、水平スキャンで得られるエコー信号に関しては、信号レベルの円周方向の平均値に対して閾値を設定し、垂直方向のスキャンによって得られるエコー信号に関しては、信号レベルの水平距離方向の平均値に対して閾値を設定することができる。
【0014】
次に、上記第3の課題を解決するために、本発明に係る自動追尾式スキャニングソナーでは、エコー信号が受信されずに標的の追尾が不能となった場合に、標的の予測位置に基づいて仮想の自動追尾を継続し、エコー信号が受信されて標的が正常に検出された時点で、通常の自動追尾へ切り替えるようにしている。これにより、泡切れや、船下への標的の移動などが原因で、一時的に自動追尾が不能となっても、エコーが受信されると自動的に追尾が再開されるため、自動追尾機能をオフにして再度ターゲットロックマークを投入する必要がなく、操作の手間を省くことができる。
【0015】
この場合、エコー信号が受信されない期間に自船の移動があれば、標的の予測位置を自船の移動距離に基づいて補正することにより、仮想の追尾を精度良く行うことができる。また、追尾が不能となった場合の標的位置を表すマークの表示態様を、正常に追尾が行われている場合の標的位置を表すマークの表示態様と異ならせることで、追尾が仮想の追尾であることを明瞭に知らせることができる。
【0016】
【発明の実施の形態】
図1は、本発明に係る自動追尾式スキャニングソナー100のブロック図である。図において、1は送受波器であって、送信時には送信電気信号を音響変換して水中へ超音波を発射し、受信時には標的で反射して帰来するエコーを受波して受信電気信号に変換する。送受波器1としては、たとえば円筒形の送受波器が用いられるが、これに限らず球形の送受波器を用いることも可能である。2は送信回路であって、水平スキャン時には、図12で示したような所定のティルト角度δをもった超音波ビーム53を水中の全方位へ送信するための送信信号を出力する。また、垂直スキャン時には、図5で示したような所定の水平方位φにおける垂直断面の所定範囲に超音波ビーム31を送信するための送信信号を出力する。なお、図5において、32は魚群、34は水底を表している。3は受信回路であって、送受波器1からの受信信号を指定されたゲインで増幅し、フィルタにて所望の周波数成分の信号を取り出す。4は送受切替部であって、送信時には送信回路2の出力信号を送受波器1へ出力し、受信時には送受波器1からの信号を受信回路3へ出力する信号切り替えを行う。
【0017】
5はビーム形成部であって、水平スキャン時において、図12のように垂直方向には所定のティルト角度δで、円周方向には全周にわたって受信ビーム57を形成する。また、垂直スキャン時において、水平方向には図5(a)のように所定の方位φで、垂直方向には図5(b)のように水平面から下方向(矢印方向)に連続して受信ビーム34を形成する。これらの受信ビームは包絡線検波され、極座標系で表されたエコー信号の強度データとしてビーム形成部5から出力される。6は送受信制御部であって、レンジ、水平スキャンでのティルト角度、垂直スキャンでの方位設定に基づいて、各スキャン時の送信ビームおよび受信ビームの制御や、受信回路3におけるゲインの制御を行う。7は動揺センサであって、船体の姿勢角を検出してその情報を送受信制御部6へ与えることにより、船体動揺に関係なく送受信ビームのティルト角度を常に一定に保つためのものであるが、本発明にとって必須のものではない。
【0018】
8は操作部であって、表示部13に表示されるエコーの画像を見ながらユーザーが操作するキーやダイアル等から構成される。この操作部8において、レンジ、水平スキャン時のティルト角度、垂直スキャン時の方位、自動追尾のオン・オフ、自動追尾開始位置などを指定する。9は切替器であって、自動追尾オフ時には、操作部8で指定されたレンジ、ティルト角度、方位を選択して出力し、自動追尾オン時には、標的の位置情報に基づいて決定されるレンジ、ティルト角度、方位を選択して出力する。10は座標変換部であって、ビーム形成部5で得られた形成された極座標系の受信データを、CRTやLCD等のモニタ装置で用いられる直交座標系の画像データに変換する。11はターゲットロック演算部であって、ビーム形成部5で得られた受信データを用いて標的の位置を検出し、自動追尾を行う。このターゲットロック演算部11は、本発明における判別手段および予測位置算出手段を構成している。
【0019】
12は表示制御部であって、座標変換部10から得られるエコーの画像データと、ターゲットロック演算部11から得られる標的の位置情報、速度情報、および操作部8からのカーソル情報に基づいて生成された文字やマークなどの画像データとを合成し、映像信号に変換する。13はCRTやLCD等のモニタ装置からなる表示部であって、上記映像信号に基づいてエコーや文字、マーク等の映像を表示する。14は船首方位検出部であって、自船の船首方位を検出するGPSジャイロやコンパス等の装置から構成される。15は速度検出部であって、自船の速度ベクトル(船速と針路)を検出する航法装置や速度計等の装置から構成される。
【0020】
図2は、スキャニングソナー100の装置本体の正面図を示している。8は上述した操作部、13aは表示部13の表示画面である。操作部8において、8aは垂直スキャンにおける方位を設定するための方位設定キー、8bは指で操作することにより画面上のマークを移動させるトラックボール、8cは自動追尾を行う場合に操作するターゲットロックキー、8dは水平スキャンにおけるティルト角度を自動または手動で設定するためのティルト角度設定キー、8eは感度を設定・調整するための感度ダイアル、8fはレンジを設定・調整するためのレンジダイアル、8gはレンジ・感度の設定時に水平スキャンと垂直スキャンのいずれのモードを設定するかの選択を行うスキャンモード選択キー、8hは漁撈の種類を設定するための漁撈設定ダイアルである。操作部8には、この他にも各種のキーやダイヤルが設けられているが、本発明では直接関係しないので、説明は省略する。
【0021】
図3は、自動追尾中に表示画面13aに表示される映像の例を示している。表示画面13aには、水平スキャン画面13hと垂直スキャン画面13vとが並べて表示されている。水平スキャン画面13hは、図12に示したような水平スキャンを行った場合の映像を表したものであり、20は自船の位置を表す自船マーク、21は魚群のエコー映像、22は標的位置を表すターゲットロックマーク、23は標的である魚群21の移動軌跡、24は水底のエコー映像、25は垂直スキャンにおける方位を表す方位マーカである。なお、画面右上のR(1000m)はレンジ、T(25°)はティルト角度、G(5.0)は水平スキャンの感度をそれぞれ表しており、画面右下の右向矢印(498m)は標的までの距離、下向矢印(232m)は標的の深度、S(0.5kt)は標的の移動速度、C(256°)は標的の移動方向をそれぞれ表している。
【0022】
また、垂直スキャン画面13vは、水平スキャン画面13hの方位マーカ25で示された方位において、図5に示したような垂直スキャンを行った場合の映像を表したものであり、26は魚群のエコー映像、27はターゲットロックマーク、28は水底のエコー映像である。29は超音波ビームのティルト角度を表したティルトマーカである。なお、画面左下のR(800m)はレンジ、G(5.0)は垂直スキャンの感度、V(234°)は垂直スキャンの方位マーカ25の方位をそれぞれ表している。
【0023】
次に、上記構成からなる自動追尾式スキャニングソナー100において、自動追尾を行う場合の動作を説明する。自動追尾にあたっては、まず、図2の表示画面13aに表示される魚群のエコーを見て、トラックボール8bの操作によって自動追尾を行おうとする魚群の位置にカーソルを合わせ、ターゲットロックキー8cを押すと、ターゲットロックマーク22が投入されて自動追尾が開始される。
【0024】
図4は自動追尾時の動作を示したフローチャートである。ステップS1およびステップS17は、切替器9において実行される手順を示し、ステップS3〜S16は、ターゲットロック演算部11において実行される手順を示している。図1において操作部8から自動追尾オンの信号が切替器9に与えられると、切替器9はターゲットロックマーク22によって指定された自動追尾開始位置をスキャンできるように、レンジ、ティルト角度、方位を設定し、これらの情報を送受信制御部6へ出力する(ステップS1)。送受信制御部6は、これらの情報を受けて所定のティルト角度および方位で超音波ビームが送受信されるように、送信回路2およびビーム形成部5を制御する。これにより、送受波器1から標的に向けて超音波ビームが送信されるとともに、標的からのエコーが受信され、受信ビームが形成される(ステップS2)。この送受信動作においては、水平スキャン(図12)と、垂直スキャン(図5)とが交互に行われる。すなわち、ステップS2で水平スキャンが行われると、ステップS2の次回実行時には垂直スキャンが行われ、その次の実行時には水平スキャンが行われる。そこで、スキャンモードが水平スキャンか垂直スキャンかを判別する(ステップS3)。
【0025】
スキャンモードが水平スキャンの場合は、船首方位検出部14で検出された船首方位データに基づいて、エコーデータを北基準に変換する(ステップS4)。すなわち、水平スキャン時にビーム形成部5によって得られたエコーデータが示す標的位置は、図6に示すように、船首方向を基準とする極座標系のデータであるため、これを北方向を基準とする極座標系のデータに変換する(θ1をθ2に変換)。また、スキャンモードが垂直スキャンの場合は、エコーデータをXY直交座標系のデータに変換する(ステップS5)。すなわち、垂直スキャン時にビーム形成部5によって得られたエコーデータが示す標的位置は、図7に示すように、水平方向(水面)から深さ方向へのスキャンによる極座標系のデータであるため、これを直交座標系のデータに変換する。
【0026】
次に、上記のようにして変換されたエコーデータから標的のエコーを抽出する処理を行う。まず、あらかじめ設定されたエコー取出範囲1(後述)からエコーデータを取り出す(ステップS6)。水平スキャンの場合は、エコーデータは図8(a)に示したような極座標系のデータとして表される。Rは距離、θは円周方向の方位である。そこで、前回の標的位置Tの距離Rtを中心として、その前後のある幅W1でエコー取出範囲1を設定し、この範囲のエコーデータを取り出す。ここでは、円周方向には全方位(θ=0°〜360°)にわたってエコーデータを取り出すが、標的位置Tの方位を中心としてある方位幅を設定し、この幅内のデータを取り出してもよい。なお、前回の標的位置Tは、ステップS2〜S15の初回実行時には、ターゲットロックマーク22が投入された位置であり、2回目以降の実行時には、後述のステップS16で計算によって算出された予測位置となる。
【0027】
一方、垂直スキャンの場合は、エコーデータは図9(a)に示したような直交座標系のデータとして表される。Rは水平距離、Dは深度である。そこで、前回の標的位置Tの深度Dtを中心として、その前後のある幅W2でエコー取出範囲1を設定し、この範囲のエコーデータを取り出す。なお、水平距離R方向には全距離にわたってエコーデータを取り出すが、標的位置Tの水平距離を中心としてある距離幅を設定し、この幅内のデータを取り出してもよい。この場合も、前回の標的位置Tは、ステップS2〜S15の初回実行時には、ターゲットロックマーク22が投入された位置であり、2回目以降の実行時には、後述のステップS16で計算によって算出された予測位置となる。
【0028】
次に、取り出したエコーデータに基づいて、水底判別処理を行う(ステップS7)。エコーデータは、前述のようにエコー信号のレベルを表している。そこで、水平スキャンの場合は、図8(a)の取出範囲1内のエコーデータについて、円周方向(θ方向)の信号レベルの平均値を計算する。ここで、水底エコーは、XY直交座標系で表示された場合に、図3のエコー24のようなドーナツ状となるため、R−θ極座標系では、図8(a)に示したように、水底エコーGは水平距離R方向にある幅を持った帯状に表される。このため、取出範囲1内におけるエコーデータ(信号レベル)の円周方向の平均値は、図8(b)のように、水底エコーGが存在する範囲において非常に大きな値を示し、魚群エコーFが存在する範囲では小さな値を示す。したがって、円周方向の平均値に対して所定の閾値Jを設定し、平均値が閾値Jを超える距離範囲rに存在するエコーを水底エコーと判断することで、水底エコーGと魚群エコーFとを明確に判別することができる。
【0029】
また、垂直スキャンの場合は、図9(a)の取出範囲1内のエコーデータについて、水平距離方向(R方向)の信号レベルの平均値を計算する。ここで、水底エコーは、XY直交座標系で表示された場合に、図3のエコー28のような直線状となるため、図9(a)においても、水底エコーGは直線状に表される。このため、取出範囲1内におけるエコーデータ(信号レベル)の水平距離方向の平均値は、図9(b)のように、水底エコーGが存在する範囲において非常に大きな値を示し、魚群エコーFが存在する範囲では小さな値を示す。したがって、水平距離方向の平均値に対して所定の閾値Kを設定し、平均値が閾値Kを超える深度範囲dに存在するエコーを水底エコーと判断することで、水底エコーGと魚群エコーFとを明確に判別することができる。
【0030】
次に、エコー取出範囲2のエコーデータを取り出す(ステップS8)。エコー取出範囲2は、図8(c)および図9(c)に示すように、標的位置Tを中心として取出範囲1よりも狭い領域に設定される。この取出範囲2から取り出したエコーデータには、魚群エコーFのデータと、水底エコーGのデータの一部とが含まれる。このように、エコーデータの取り出しを取出範囲2に限定して行うことで、データの処理時間を短縮することができる。
【0031】
次に、水底エコーの信号レベルを0として、標的の位置をエコーデータから検出する(ステップS9)。すなわち、取出範囲2から取り出したエコーデータのうち、ステップS7において水底と判定された範囲にあるエコーデータの値を0とする。これによって、水底エコーのデータは除去される。その後、残りのエコーデータについて、レベルがある閾値以上のサンプルを取り出し、隣接するサンプルとの連続性を調べてグループ化する。複数のグループが存在する場合には、各グループの重心位置を求め、重心位置が標的位置Tに最も近いものを、追尾対象である標的からのエコーと判断する。そして、選ばれたグループの重心位置を今回の標的位置とする。ここで、水平スキャンの場合は、図8からわかるように、標的の方位(θ)と標的までの距離(R)によって標的位置が決まり、垂直スキャンの場合は、図9からわかるように、標的の水平距離(R)と標的の深度(D)によって標的位置が決まる。
【0032】
次に、追尾している標的が正常に検出できたか否かを判別する(ステップS10)。上記のようにエコーデータから標的位置が正常に検出できた場合は、検出された標的位置を平滑化する処理を行う(ステップS11)。すなわち、前回の標的位置とステップS9で検出された今回の標的位置との空間的な内分点を、平滑化された標的位置とし、これを現在の標的位置とする。
【0033】
図10は、内分による標的位置の平滑化を説明する図である。水平スキャン時の標的位置(X,Y,Z)は、ティルト角をα、内分比率をg、標的の方位をθ、標的までの距離をrとしたとき、次のようにして算出される。
【数1】

また、垂直スキャン時の標的位置(X,Y,Z)は、方位をβ、内分比率をg、 標的の水平距離をr、標的の深度をdとしたとき、次のようにして算出される。
【数2】
このように、内分によって標的位置を平滑化するのは、次のような理由による。すなわち、今回の標的位置(エコーから検出された実際の標的位置)のエコー映像を画面に表示すると、前回の標的位置からの変位量が映像のふらつきとなって現われ、画面上の映像が不安定になって見にくくなる。これに対して、図10のように、今回の標的位置と前回の標的位置との内分点を現在の標的位置とし、これを画面上に表示すれば、前回の標的位置からの変位量が小さくなって、映像がふらつく度合いが減少するので、映像が見やすくなる。このような平滑効果は内分比率gによって決まり、内分比率gの値が小さいほど平滑効果が大きくなって映像は安定し、内分比率gの値が大きくなると平滑効果が小さくなって映像が不安定となる。
【0036】
こうして、現在の標的位置が算出されれば、次に、この標的位置にターゲットロックマーク22、27(図3)を表示する(ステップS12)。これによって、表示画面13a上のターゲットロックマーク22、27は、最初に投入した位置から新たな位置に更新される。また、これにともなって移動軌跡23も更新される。続いて、標的位置に基づいて標的の移動速度を計算する(ステップS13)。この移動速度は、現在の標的位置の座標と、T秒前の標的位置の座標との距離を経過時間Tで除することによって求めることができる。
【0037】
ところで、ステップS10において、船のスクリュー回転により発生する泡のためにエコーが受信できなくなる、いわゆる泡切れや、図18のように魚群55が船下へ移動して超音波ビーム53で捕捉できなくなる等の原因によって、エコーが受信されずに、追尾している標的を正常に検出できない場合がある。この場合は、前回の標的位置をステップS11で求めたような平滑化された標的位置(現在の標的位置)とみなして(ステップS14)、この標的位置にターゲットロックマーク22、27を表示して(ステップS15)、仮想の自動追尾を継続する。なお、このときのターゲットロックマーク22、27は、ステップS12で表示される通常動作時のターゲットロックマーク22、27とは異なる態様で表示される。たとえば、マークの色を異ならせたり、点滅表示をさせたり、輝度を低くする等の態様で表示される。これにより、追尾が通常の追尾ではなく仮想追尾であることを明瞭に知らせることができる。
【0038】
ステップS13またはステップS15の処理を経た後、ステップS16へ移り、速度検出部15で検出された船速と針路の情報から標的の予測位置を求める。前回の送受信によって標的の位置を検出した後、今回の送受信を行うまでには所定の時間間隔があるので、その間に自船が移動すると、自船から標的までの距離や方位が変化する。そこで、超音波ビームを確実に標的に向けて発射するために、以下に述べるような方法で、自船移動による標的位置の変動を補正して、標的の予測位置を求める。すなわち、図11に示したN(北) −E(東)−Z(深度)直交座標系において、前回自船位置で検出された前回標的位置の座標が、前回自船位置を原点として、P0 (X0, Y0, Z0)と表されたとする。前回の送受信から今回の送受信までの経過時間をt、その時の自船速度をV、北基準針路をωとすると、現在自船位置から見た前回の標的位置の座標P0 ’(X0’,Y0’,Z0’)は、以下のように表される。この座標P0 ’が標的の予測位置となる。
【数3】
ターゲットロック演算部11で上記のようにして標的予測位置が算出されると、切替器9はこの情報を受けて、標的予測位置をスキャンできるように、レンジ、ティルト角度、方位を設定し、これらを送受信制御部6へ出力する(ステップS17)。送受信制御部6は、これらの情報を受けて所定のティルト角度および方位で超音波ビームが送受信されるように、送信回路2およびビーム形成部5を制御する。そして、次のスキャン動作に移り、送受波器1から標的予測位置に向けて超音波ビームが送信されるとともに、標的からのエコーが受信され、受信ビームが形成される(ステップS2)。ステップS2以降の動作は前述したとおりであり、自動追尾がオフとなるまで、送受信ごとにステップS2〜S15の処理が繰り返し実行される。この場合、ステップS14においては、ステップS16で求めた予測位置を現在の標的位置とみなして仮想の自動追尾が行われ、ステップS6〜S9でエコーが受信されて標的が正常に検出された時点で、ステップS11へ移行し、通常の自動追尾へ切り替えられる。
【0040】
ところで、本実施形態では、水平スキャンと垂直スキャンとを交互に行っているため、水平スキャンに基づく標的予測位置(方位、距離)だけでなく、垂直スキャンに基づく標的予測位置(距離、深度)を求めることができる。すなわち、垂直スキャン時には、エコー信号から標的の深度情報が得られるため、ステップS17において、この深度情報に基づいて、次の水平スキャン時のティルト角度を自動追尾が可能な最適の角度に調整することができる。この結果、標的が上下方向に移動しても、ティルト角度を追従させて標的を捕捉することが可能となり、自動追尾を確実に行うことができる。なお、上述したスキャニングソナー100は、垂直スキャン時に超音波ビームが標的に向くように水平方向のスキャンに基づいてビームの方位を制御する自動方位制御機能を備えている。垂直スキャンの水平方位φは、図2の方位設定キー8aによって2方位を独立して設定できるが、自動追尾中は自動方位制御機能が働いて、一方の方位が自動的に標的に追随するようになっている。また、スキャニングソナー100は、このほかに、船の移動に伴いティルト角度を自動的に変化させる自動ティルト制御機能や、標的の位置に応じてレンジを自動的に切り替える自動レンジ制御機能も備えている。
【0041】
また、本実施形態では、水底のエコー信号と標的のエコー信号とを判別し、標的のエコー信号から算出された予測位置に基づいて自動追尾を行うようにしている。このため、図17のように水底56付近にいる魚群55を自動追尾する場合に、魚群55のエコーと水底56のエコーとが隣接あるいは連続していても、両者を区別して魚群55だけを正確に追尾することができ、誤って水底56を追尾してしまうことがなくなる。
【0042】
また、エコー信号が受信されずに追尾が不能となった場合、従来では、自動追尾が自動的にオフとなり、追尾を再開するためには、再度操作部を操作してターゲットロックマークを投入する必要があったが、本実施形態では、一時的に追尾不能となっても仮想の追尾が継続され、標的が検出された時点で自動的に追尾が再開されるため、再度ターゲットロックマークを投入する必要がなくなる。
【0043】
以上述べた実施形態においては、水平スキャンと垂直スキャンとを交互に行っているため、相互間での信号のクロストークを抑制することができるが、本発明はこれに限定されるものではなく、水平スキャンと垂直スキャンとを同時に並行して行うようにしてもよい。この場合は、垂直スキャンが終わるのを待たずに水平スキャンのティルト角度を制御できるので、ティルト制御の応答性を向上させることができる。
【0044】
また、図8および図9の例では、水底を判別するにあたって、円周方向や水平距離方向の信号レベルの平均値を用いたが、平均値に代えて、円周方向や水平距離方向の信号レベルの積算値を用いてもよい。
【0045】
また、図5の例では、垂直スキャンを1方位のみについて行っているが、2方位以上にわたって垂直スキャンを行うようにしてもよい。
【0046】
また、上記実施形態では、自船の船速と針路のみに基づいて標的の予測位置を算出しているが、同時に求められた標的の移動速度をも加えて予測位置を算出することにより、さらに精度の高い自動追尾機能を実現することができる。
【0047】
【発明の効果】
本発明によれば、水平スキャンに加えて垂直スキャンを行うことで標的の深度を検出できるので、深度情報に基づいて水平スキャンのティルト角度を最適に制御することが可能となり、これによって標的が上下方向に移動しても自動追尾を確実に行うことができる。
【0048】
また、本発明によれば、水底のエコー信号と標的のエコー信号を判別して、標的のエコー信号のみを取り出し、この信号に基づいて標的の予測位置を算出するようにしたので、底付き魚群を自動追尾する場合でも、誤って水底を追尾してしまうことがなく、正確な自動追尾を行うことができる。
【0049】
また、本発明によれば、一時的に追尾が不能となっても、自動追尾を中止させずに、標的の予測位置に基づいて仮想の自動追尾を継続し、標的が検出されれば自動的に追尾が再開されるようにしたので、ターゲットロックマークをあらためて投入する必要がなく、操作の手間を省くことができる。
【図面の簡単な説明】
【図1】本発明に係る自動追尾式スキャニングソナーのブロック図である。
【図2】スキャニングソナーの装置本体の正面図である。
【図3】自動追尾中に表示画面に表示される映像の例である。
【図4】自動追尾時の動作を示したフローチャートである。
【図5】垂直スキャンを説明する図である。
【図6】水平スキャン時の極座標系のデータを説明する図である。
【図7】垂直スキャン時の極座標系のデータを説明する図である。
【図8】水平スキャン時のエコーデータの取り出しを説明する図である。
【図9】垂直スキャン時のエコーデータの取り出しを説明する図である。
【図10】標的位置の平滑化を説明する図である。
【図11】標的位置の補正を説明する図である。
【図12】スキャニングソナーの原理を示した図である。
【図13】自動追尾式スキャニングソナーの画面例である。
【図14】魚群の検出を説明する図である。
【図15】自動追尾を説明する図である。
【図16】魚群のビーム幅外への移動を説明する図である。
【図17】底付き魚群の追尾を説明する図である。
【図18】魚群の船下への移動を説明する図である。
【符号の説明】
1 送受波器
2 送信回路
3 受信回路
5 ビーム形成部
6 送受信制御部
9 切替器
11 ターゲットロック演算部
13 表示部
21、26 魚群のエコー映像
22、27 ターゲットロックマーク
23 移動軌跡
24、28 水底のエコー映像
100 自動追尾式スキャニングソナー
Claims (9)
- 所定のティルト角度をもった超音波ビームを水中の全方位へ送信し、水平方向のスキャンによって水中の標的からのエコー信号を検出して、当該エコーに基づいて標的の映像を表示するとともに、超音波ビームが標的に向くようにティルト角度を制御することにより表示された標的を自動追尾するスキャニングソナーにおいて、
前記水平方向のスキャンに加えて、所定の水平方位における垂直断面の所定範囲に前記超音波ビームとは別の超音波ビームを送信して垂直方向のスキャンを行い、
前記垂直方向のスキャンによって水中の標的からのエコー信号を検出し、このエコー信号から得られる標的の深度情報に基づいて、水平方向のスキャンにおけるティルト角度を自動追尾が可能な角度に調整するとともに、垂直方向のスキャン時に超音波ビームが標的に向くように水平方向のスキャンに基づいてビームの方位を制御することを特徴とする自動追尾式スキャニングソナー。 - 請求項1に記載の自動追尾式スキャニングソナーにおいて、
水平方向のスキャンと垂直方向のスキャンとを交互に行うことを特徴とする自動追尾式スキャニングソナー。 - 請求項1に記載の自動追尾式スキャニングソナーにおいて、
水平方向のスキャンと垂直方向のスキャンとを並行して行うことを特徴とする自動追尾式スキャニングソナー。 - 請求項1に記載の自動追尾式スキャニングソナーにおいて、
水平方向および垂直方向のスキャンによって得られるエコー信号のうち、水底のエコー信号と標的のエコー信号とを判別する判別手段と、
前記判別手段で判別された標的のエコー信号に基づき標的の予測位置を算出する予測位置算出手段と、を備え、
前記予測位置算出手段で算出された標的の予測位置に基づいて自動追尾を行うことを特徴とする自動追尾式スキャニングソナー。 - 請求項4に記載の自動追尾式スキャニングソナーにおいて、
水平方向のスキャンによって得られたエコー信号のレベル、および垂直方向のスキャンによって得られたエコー信号のレベルに対して、それぞれ閾値が設定されており、
前記判別手段は、水平方向および垂直方向のスキャンで得られたエコー信号のレベルが、前記閾値を超える場合は当該エコー信号を水底のエコー信号と判別し、閾値以下である場合は当該エコー信号を標的のエコー信号と判別することを特徴とする自動追尾式スキャニングソナー。 - 請求項5に記載の自動追尾式スキャニングソナーにおいて、
水平方向のスキャンによって得られるエコー信号に関しては、信号レベルの円周方向の平均値に対して閾値が設定され、垂直方向のスキャンによって得られるエコー信号に関しては、信号レベルの水平距離方向の平均値に対して閾値が設定されていることを特徴とする自動追尾式スキャニングソナー。 - 請求項1ないし請求項6のいずれかに記載の自動追尾式スキャニングソナーにおいて、
エコー信号が受信されずに標的の追尾が不能となった場合に、標的の予測位置に基づいて仮想の自動追尾を継続し、エコー信号が受信されて標的が正常に検出された時点で通常の自動追尾へ切り替えることを特徴とする自動追尾式スキャニングソナー。 - 請求項7に記載の自動追尾式スキャニングソナーにおいて、
エコー信号が受信されない期間に自船の移動があった場合に、標的の予測位置を自船の移動距離に基づいて補正することを特徴とする自動追尾式スキャニングソナー。 - 請求項7または請求項8に記載の自動追尾式スキャニングソナーにおいて、
追尾が不能となった場合の標的位置を表すマークの表示態様を、正常に追尾が行われている場合の標的位置を表すマークの表示態様と異ならせたことを特徴とする自動追尾式スキャニングソナー。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002122527A JP4033704B2 (ja) | 2002-04-24 | 2002-04-24 | 自動追尾式スキャニングソナー |
| US10/397,355 US6870793B2 (en) | 2002-04-24 | 2003-03-27 | Automatically tracking scanning sonar |
| GB0307457A GB2387907B (en) | 2002-04-24 | 2003-03-31 | Automatically tracking scanning sonar |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002122527A JP4033704B2 (ja) | 2002-04-24 | 2002-04-24 | 自動追尾式スキャニングソナー |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003315453A JP2003315453A (ja) | 2003-11-06 |
| JP2003315453A5 JP2003315453A5 (ja) | 2005-09-22 |
| JP4033704B2 true JP4033704B2 (ja) | 2008-01-16 |
Family
ID=19194162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002122527A Expired - Fee Related JP4033704B2 (ja) | 2002-04-24 | 2002-04-24 | 自動追尾式スキャニングソナー |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6870793B2 (ja) |
| JP (1) | JP4033704B2 (ja) |
| GB (1) | GB2387907B (ja) |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7187320B1 (en) * | 2004-08-27 | 2007-03-06 | Lockheed Martin Corporation | Matched maneuver detector |
| JP5082031B2 (ja) * | 2004-10-01 | 2012-11-28 | 国立大学法人北海道大学 | 魚群の魚量情報を算出可能な水中探知装置及びその方法 |
| RU2275654C1 (ru) * | 2004-10-21 | 2006-04-27 | Федеральное государственное унитарное предприятие "Всероссийский научно-исследовательский институт рыбного хозяйства и океанографии" | Устройство для поиска и обнаружения рыбы |
| JP4796777B2 (ja) * | 2005-02-09 | 2011-10-19 | 株式会社光電製作所 | 水中探知装置 |
| JP2006322773A (ja) * | 2005-05-18 | 2006-11-30 | Furuno Electric Co Ltd | スキャニングソナー |
| ES2291069B1 (es) * | 2005-06-01 | 2009-01-01 | Zunibal, S.L. | Sonar de red. |
| JP2007327855A (ja) * | 2006-06-08 | 2007-12-20 | Japan Radio Co Ltd | 自動追尾スキャニングソナー |
| US7542376B1 (en) * | 2006-07-27 | 2009-06-02 | Blueview Technologies, Inc. | Vessel-mountable sonar systems |
| EP1925949A1 (en) * | 2006-11-24 | 2008-05-28 | BP Shipping Limited | Ship mounted underwater sonar system |
| JP2008203227A (ja) * | 2007-02-23 | 2008-09-04 | Japan Radio Co Ltd | 自動追尾スキャニングソナー |
| JP5096205B2 (ja) * | 2007-03-26 | 2012-12-12 | 日本無線株式会社 | 自動追尾スキャニングソナー |
| US8305844B2 (en) * | 2008-08-07 | 2012-11-06 | Depasqua Louis | Sonar navigation system and method |
| JP2010145223A (ja) * | 2008-12-18 | 2010-07-01 | Japan Radio Co Ltd | スキャニングソナー装置および追尾方法 |
| JP2010145224A (ja) * | 2008-12-18 | 2010-07-01 | Japan Radio Co Ltd | スキャニングソナー装置 |
| JP5547889B2 (ja) * | 2008-12-18 | 2014-07-16 | 日本無線株式会社 | スキャニングソナー装置および追尾方法 |
| JP5322619B2 (ja) * | 2008-12-18 | 2013-10-23 | 日本無線株式会社 | スキャニングソナー装置 |
| US8305840B2 (en) | 2009-07-14 | 2012-11-06 | Navico, Inc. | Downscan imaging sonar |
| US8300499B2 (en) | 2009-07-14 | 2012-10-30 | Navico, Inc. | Linear and circular downscan imaging sonar |
| US8275172B2 (en) * | 2009-10-30 | 2012-09-25 | Raytheon Applied Signal Technology, Inc. | Multipass data integration for automatic detection and classification of objects |
| KR100979286B1 (ko) | 2009-12-07 | 2010-08-31 | 엘아이지넥스원 주식회사 | 수중 거리 및 방위를 측정하는 장치 및 방법 |
| JP5023206B2 (ja) * | 2010-12-06 | 2012-09-12 | 株式会社光電製作所 | 水中探知装置 |
| US9142206B2 (en) | 2011-07-14 | 2015-09-22 | Navico Holding As | System for interchangeable mounting options for a sonar transducer |
| JP5634355B2 (ja) * | 2011-08-29 | 2014-12-03 | 株式会社東芝 | 目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法 |
| US9182486B2 (en) | 2011-12-07 | 2015-11-10 | Navico Holding As | Sonar rendering systems and associated methods |
| US9268020B2 (en) | 2012-02-10 | 2016-02-23 | Navico Holding As | Sonar assembly for reduced interference |
| JP6014382B2 (ja) * | 2012-06-20 | 2016-10-25 | 古野電気株式会社 | 水中探知装置、水中表示システム、プログラムおよび水中表示方法 |
| US9354312B2 (en) | 2012-07-06 | 2016-05-31 | Navico Holding As | Sonar system using frequency bursts |
| RU2516602C1 (ru) * | 2012-12-25 | 2014-05-20 | Открытое акционерное общество "Концерн "Океанприбор" | Способ определения глубины погружения объекта |
| JP2014228521A (ja) * | 2013-05-27 | 2014-12-08 | 本多電子株式会社 | サーチライトソナー |
| JP6201159B2 (ja) * | 2013-05-29 | 2017-09-27 | 本多電子株式会社 | サーチライトソナー |
| FR3009413B1 (fr) * | 2013-08-02 | 2015-07-17 | Thales Sa | Dispositif d'aide a la detection d'objets poses sur le sol a partir d'images du sol issues d'un dispositif d'imagerie par reflexion d'ondes |
| US10481259B2 (en) * | 2013-09-13 | 2019-11-19 | Navico Holding As | Tracking targets on a sonar image |
| JP6393908B2 (ja) * | 2014-03-04 | 2018-09-26 | 本多電子株式会社 | 超音波ソナー装置 |
| KR102309863B1 (ko) * | 2014-10-15 | 2021-10-08 | 삼성전자주식회사 | 전자 장치, 그 제어 방법 및 기록 매체 |
| US20190120959A1 (en) * | 2014-12-10 | 2019-04-25 | Navico Holding As | Event triggering and automatic waypoint generation |
| DE102014119026A1 (de) * | 2014-12-18 | 2016-06-23 | Thyssenkrupp Ag | Verfahren zur Ortung eines Objekts unter Wasser |
| JP6492278B2 (ja) * | 2015-03-19 | 2019-04-03 | 本多電子株式会社 | 魚群探知装置 |
| US10151829B2 (en) | 2016-02-23 | 2018-12-11 | Navico Holding As | Systems and associated methods for producing sonar image overlay |
| US11367425B2 (en) | 2017-09-21 | 2022-06-21 | Navico Holding As | Sonar transducer with multiple mounting options |
| JP7051625B2 (ja) | 2018-07-12 | 2022-04-11 | 古野電気株式会社 | 水中探知装置及び水中探知方法 |
| KR102137313B1 (ko) * | 2018-08-24 | 2020-07-23 | 대전대학교 산학협력단 | 라이다 센서 제어 방법 및 라이다 센서 제어 시스템 |
| CN111198577B (zh) * | 2019-09-20 | 2023-08-15 | 中国船舶重工集团公司第七0九研究所 | 一种针对重载转台的强声拒止目标跟踪方法与系统 |
| JP2021123318A (ja) * | 2020-02-10 | 2021-08-30 | 三井E&S造船株式会社 | 自動操船システム |
| CN112362153A (zh) * | 2020-09-15 | 2021-02-12 | 中国人民解放军军事科学院国防科技创新研究院 | 基于uuv平台的低频主动水声探测系统及方法 |
| US20220350005A1 (en) * | 2021-05-03 | 2022-11-03 | Garmin International, Inc. | Attitude synchronous sonar system |
| US12601822B2 (en) * | 2023-12-28 | 2026-04-14 | Furuno Electric Co., Ltd. | System and method for sonar image display |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5726770A (en) * | 1980-07-25 | 1982-02-12 | Koden Electronics Co Ltd | Composite display sonar |
| US4935906A (en) * | 1988-01-04 | 1990-06-19 | Span, Inc. | Scanning sonar system |
| US5148412A (en) * | 1991-02-21 | 1992-09-15 | American Oilfield Divers, Inc. | Diver guidance method and system |
| JP3002920B2 (ja) * | 1992-02-25 | 2000-01-24 | 古野電気株式会社 | 水中探知装置 |
| JPH1090411A (ja) | 1996-09-13 | 1998-04-10 | Furuno Electric Co Ltd | 水中探知表示装置 |
| JP4031101B2 (ja) * | 1998-01-30 | 2008-01-09 | 古野電気株式会社 | 信号入射角度検出装置、信号の入射角度の検出方法およびスキャニングソナー |
| US6084827A (en) * | 1998-08-19 | 2000-07-04 | Battelle Memorial Institute | Dual-head multibeam sonar apparatus and method for tracking objects underwater |
-
2002
- 2002-04-24 JP JP2002122527A patent/JP4033704B2/ja not_active Expired - Fee Related
-
2003
- 2003-03-27 US US10/397,355 patent/US6870793B2/en not_active Expired - Lifetime
- 2003-03-31 GB GB0307457A patent/GB2387907B/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6870793B2 (en) | 2005-03-22 |
| JP2003315453A (ja) | 2003-11-06 |
| GB2387907B (en) | 2005-12-28 |
| US20030202426A1 (en) | 2003-10-30 |
| GB0307457D0 (en) | 2003-05-07 |
| GB2387907A (en) | 2003-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4033704B2 (ja) | 自動追尾式スキャニングソナー | |
| US9354314B2 (en) | Underwater detection device | |
| JP2006162480A (ja) | 水中探知装置 | |
| JP5873676B2 (ja) | レーダ基準方位補正装置、レーダ装置、レーダ基準方位補正プログラム、及びレーダ基準方位補正方法 | |
| GB2444161A (en) | Echo image display apparatus | |
| KR19990078351A (ko) | 수중물체탐지장치 | |
| JP4106124B2 (ja) | 自動魚群追尾スキャニングソナー | |
| JP2008268183A (ja) | 水中探知装置 | |
| WO2023162562A1 (ja) | 物標監視システム、物標監視方法、及びプログラム | |
| JP2007064768A (ja) | 水中探知装置 | |
| JP2016090348A (ja) | センサ遠隔制御システム、遠隔操作装置、センサ装置、及びセンサ遠隔制御方法 | |
| JP3450661B2 (ja) | 水中探知装置 | |
| JPH0385476A (ja) | 海底探索装置 | |
| JP2010145224A (ja) | スキャニングソナー装置 | |
| JP3429362B2 (ja) | 魚群探知器 | |
| JP2019132713A (ja) | 速度算出装置、速度算出方法、及び、プログラム | |
| JP6811069B2 (ja) | 水中探知信号処理装置、水中探知装置、及び水中探知信号処理方法 | |
| JP3156784B2 (ja) | 音響探信儀調定諸元最適化装置 | |
| JP5547889B2 (ja) | スキャニングソナー装置および追尾方法 | |
| JP2850871B2 (ja) | アクティブ信号処理回路 | |
| JP2023072673A (ja) | ソナー、物標検出方法およびプログラム | |
| JPH08146118A (ja) | 遭難発見システム | |
| JPH04279883A (ja) | 魚群探知機 | |
| JP2002148337A (ja) | 水深表示装置および魚群探知機 | |
| JPH06273519A (ja) | アクティブソーナー装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050413 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071023 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4033704 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131102 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141102 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |