JP4076357B2 - ナビゲーション装置 - Google Patents
ナビゲーション装置 Download PDFInfo
- Publication number
- JP4076357B2 JP4076357B2 JP2002050267A JP2002050267A JP4076357B2 JP 4076357 B2 JP4076357 B2 JP 4076357B2 JP 2002050267 A JP2002050267 A JP 2002050267A JP 2002050267 A JP2002050267 A JP 2002050267A JP 4076357 B2 JP4076357 B2 JP 4076357B2
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- guidance
- vehicle
- road
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000013459 approach Methods 0.000 claims description 74
- 238000000034 method Methods 0.000 claims description 23
- 238000004364 calculation method Methods 0.000 claims description 14
- 238000003384 imaging method Methods 0.000 description 23
- 230000004397 blinking Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 12
- 230000035807 sensation Effects 0.000 description 3
- 239000003973 paint Substances 0.000 description 2
- 230000009194 climbing Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images



























Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Description
【発明の属する技術分野】
本発明はナビゲーション装置に関し、より詳細には、交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置に関する。
【0002】
【従来の技術】
図30は、従来のナビゲーション装置の要部を概略的に示したブロック図である。車速から演算して走行距離を取得するための車速センサ2と、進行方向を取得するためのジャイロセンサ3とがマイコン1に接続されており、マイコン1は、演算した走行距離、及び進行方向に基づいて自車位置を割り出すようになっている(自律航法)。
【0003】
GPS受信機4は、アンテナ5を介して衛星からのGPS信号を受信するものであり、マイコン1に接続されており、マイコン1は、GPS信号に基づいて自車位置を割り出すようになっている(GPS航法)。
【0004】
また、道路データ等が記憶されたDVD−ROM7(CD−ROMなどの記憶装置も可能)から道路データ等を取り込むことのできるDVDドライブ6がマイコン1に接続されており、マイコン1は、割り出した自車位置と道路データとを合わせる(いわゆる、マップマッチング処理を行う)ことによって、自車位置が正確に示された地図を表示パネル9bへ表示するようになっている。
【0005】
なお、道路データは、ネットワークの形で交差点等(ノード)とそれらを繋ぐ線(リンク)とで構成されている。図31に、DVD−ROM7に記憶されている道路ネットワークデータにおけるデータ構造の一例を示す。
【0006】
また、リモコン8に設けられたジョイスティック8aやボタンスイッチ8bから出力されたスイッチ信号や、表示装置9に設けられたボタンスイッチ9aから出力されたスイッチ信号がマイコン1に入力され、これらスイッチ信号に応じた処理がマイコン1で行われるようになっている。例えば、マイコン1は、これらスイッチから移動目的地の情報を取り込むと、自車位置から目的地までの最適ルートを探索し、これを誘導ルートとして地図と共に表示パネル9b上に表示するようになっている。
【0007】
このようにナビゲーション装置では、表示パネル9bに地図が表示され、その地図上に使用者により入力された目的地、該目的地までのルート、自車の現在位置に対応する自車位置マーク、及びそれまでの自車の走行軌跡等が重ねて表示されるようになっており、使用者は、この表示パネル9bを逐次参照することで、進路情報を得ることができ、その進路情報に従うことで目的地に到達することができるようになっている。
【0008】
また、マイコン1には、自車が交差点に接近すると、該交差点に対する進入方向を基準にして前記交差点からの脱出角度を求め、該脱出角度が所定の角度(例えば、30°)以上のとき、図32に示したような交差点拡大図を表示パネル9b上に表示するようになっており、使用者は、この表示パネル9bに表示された交差点拡大図を参照することで、交差点Qaでどの方向に進んだら良いのかが分かるようになっている。また、ナビゲーション装置によっては音声により進行方向を指示するものもある。
【0009】
【発明が解決しようとする課題】
ところで、交差点には、図33(a)に示したように、A点からB点に向けて実際に走行してみると直線を走行しているのとあまり変わらない交差点Qbがある。図33(b)は、A点から交差点Qbへ進入する場合に、B点、C点それぞれの方向へ脱出する場合の脱出角度を示した図である。
【0010】
自車がA点からC点に向かって進む場合には、交差点Qbに対する進入方向を基準にした脱出角度が90°(前記所定の角度30°以上)となるので、図34(a)に示したような交差点拡大図を表示パネル9b上に表示したり、「この先の交差点を右折して下さい。」等と音声で案内したりする。
【0011】
また、自車がA点からB点に向かって進む場合にも、交差点Qbに対する進入方向を基準にした脱出角度が35°(前記所定の角度30°以上)となるので、図34(b)に示したような交差点拡大図を表示パネル9b上に表示したり、「この先の交差点を斜め右に進んで下さい。」等と音声で案内したりする。
【0012】
ところが、自車がA点からB点に向かって進む場合というのは、上記したように、実際に走行してみると直線を走行しているのとあまり変わらないので、交差点Qbでの進行方向などの案内がなかったとしても、使用者(ドライバー)は別段困らない。逆に、案内があったがために、C点の方向へ進路を変更しなければならないのではないかと使用者に思わせてしまい、間違った方向へ向かってしまう虞れがある。
【0013】
このように、案内が必要のないところで、案内を行ってしまうと、ドライバーが却って混乱し、間違った方向へ曲がったりする虞れがあるため、交差点案内が必要であるか否かの判断を適切に行うことが重要となる。
【0014】
本発明は上記課題に鑑みなされたものであって、交差点案内の要/不要の判断を適切に行うことのできるナビゲーション装置を提供することを目的としている。
【0015】
【課題を解決するための手段及びその効果】
上記目的を達成するために本発明に係るナビゲーション装置(1)は、交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置において、道路標示情報に基づいて、交差点案内の要/不要を判断する第1の要不要判断手段を備え、前記交差点案内手段が、前記第1の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0016】
また本発明に係るナビゲーション装置(2)は、上記ナビゲーション装置(1)において、前記道路標示情報が、中央線情報、車道と路側帯との境を示す境界線情報、停止線情報、及び進行方向別通行区分情報のうちのいずれかであることを特徴としている。
【0017】
また本発明に係るナビゲーション装置(3)は、上記ナビゲーション装置(2)において、前記道路標示情報が、中央線情報、又は車道と路側帯との境を示す境界線情報であり、前記第1の要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路の表面に記されている前記中央線、又は前記境界線と、前記交差点からの脱出道路の表面に記されている前記中央線、又は前記境界線とが繋がっているか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0018】
また本発明に係るナビゲーション装置(4)は、上記ナビゲーション装置(2)において、前記道路標示情報が、停止線情報であり、前記第1の要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路の表面に停止線が記されているか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0019】
また本発明に係るナビゲーション装置(5)は、上記ナビゲーション装置(2)において、前記道路標示情報が、進行方向別通行区分情報であり、前記第1の要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路のうち、自車の走行している車線の表面に記されている進行方向が一方向だけであり、なおかつ前記進行方向と、前記交差点からの脱出方向とが一致するか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0020】
上記したナビゲーション装置(1)〜(5)のいずれかによれば、ペイントなどによって路面に記されている道路標示情報(例えば、中央線情報、車道と路側帯との境を示す境界線情報、停止線情報、進行方向別通行区分情報)に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行う。
【0021】
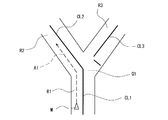
例えば、図1に示したように、交差点Q1への自車Mの進入道路となる道路R1の表面に記されている中央線CL1と、道路R2の表面に記されている中央線CL2とが繋がっているので、自車Mがルート案内に基づく矢印A1に従って進む場合には、交差点Q1における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ていると判断し、交差点案内を行わない。
【0022】
他方、自車Mが別のルート案内に従って道路R3へ脱出する場合には、道路R1の表面に記されている中央線CL1と、脱出道路となる道路R3の表面に記されている中央線CL3とが繋がっていないので、交差点Q1における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行う。
【0023】
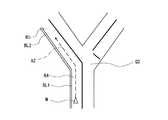
また、図2に示したように、交差点Q2への自車Mの進入道路となる道路R4の表面に記されている、車道と路側帯との境を示す境界線BL1と、道路R5の表面に記されている境界線BL2とが繋がっているので、自車Mがルート案内に基づく矢印A2に従って進む場合には、交差点Q2における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ていると判断し、交差点案内を行わない。
【0024】
また、図3に示したように、自車Mが道路R7を通って交差点Q3に接近している場合、交差点Q3への自車Mの進入道路となる道路R7の表面に停止線SL1が記されているので、自車Mが道路R7よりも優先道路となる道路R8、R9へ入ろうとしている、あるいは道路R8、R9を横切って道路R10へ入ろうとしている(すなわち、交差点Q3における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違う)と判断し、交差点案内を行う。
【0025】
このように、ペイントなどによって路面に記されている前記道路標示情報に基づいて、交差点における通行が、ドライバーにとって、道なり走行の感覚と似ているか否か、すなわち、交差点案内が必要であるか否かを適切に判断することができる。従って、前記道路標示情報に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行うことにより、ドライバーを正しい方向へ誘導することができる。
【0026】
また、図4に示したように、自車Mが道路R11の左端車線LCL1を走行し、ルート案内に基づく矢印A3に従って進み、道路R12へ脱出する場合、道路R11の左端車線LCL1の表面に記されている(一方向だけを示す)進行方向LA 1(左折)と、交差点Q4からの脱出方向(左折)とが一致するので、ドライバーが交差点Q4で左折すべきことを認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)と判断し、交差点案内を行わない。
【0027】
他方、自車Mが交差点Q4を左折するために、道路R11の左端車線LCL1へ進路変更していなければならないにも関わらず、今なお、自車Mが道路R11の中央車線CCL1や、右端車線RCL1を走行している場合には、道路R11の中央車線CCL1や、右端車線RCL1の表面に記されている進行方向CA 1(直進)や、進行方向RA 1(右折)が示す方向と、交差点Q4からの脱出方向(左折)とが一致しないので、ドライバーが交差点Q4で左折すべきことを認識していない(すなわち、交差点案内の必要がある)と判断し、交差点案内を行う。
【0028】
このように、ペイントなどによって路面に記されている、車線毎に指定される前記進行方向情報に基づいて、交差点案内の要/不要の判断を自車が走行している車線毎に行うことができる。
【0029】
また本発明に係るナビゲーション装置(6)は、交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置において、道路標識情報に基づいて、交差点案内の要/不要を判断する第2の要不要判断手段を備え、前記交差点案内手段が、前記第2の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0030】
また本発明に係るナビゲーション装置(7)は、上記ナビゲーション装置(6)において、前記道路標識情報が、一時停止情報、指定方向外進行禁止情報、及び進行方向別通行区分情報のうちのいずれかであることを特徴としている。
【0031】
また本発明に係るナビゲーション装置(8)は、上記ナビゲーション装置(7)において、前記道路標識情報が、一時停止情報であり、前記第2の要不要判断手段が、案内の要/不要の判断対象となる交差点への進入に対する一時停止の道路標識が設置されているか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0032】
また本発明に係るナビゲーション装置(9)は、上記ナビゲーション装置(7)において、前記道路標識情報が、指定方向外進行禁止情報であり、前記第2の要不要判断手段が、案内の要/不要の判断対象となる交差点からの脱出方向が一方向だけであるか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0033】
また本発明に係るナビゲーション装置(10)は、上記ナビゲーション装置(7)において、前記道路標識情報が、進行方向別通行区分情報であり、前記第2の要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路のうち、自車の走行している車線に指定されている進行方向が一方向だけであり、なおかつ前記進行方向と、前記交差点からの脱出方向とが一致するか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0034】
上記したナビゲーション装置(6)〜(10)のいずれかによれば、標示板に表示される道路標識情報(例えば、一時停止情報、指定方向外進行禁止情報、進行方向別通行区分情報)に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行う。
【0035】
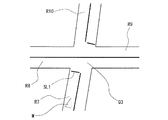
例えば、図5に示したように、自車Mが道路R13を通って交差点Q5に接近している場合、交差点Q5への進入に対する“一時停止”の標示板SP1が設置されているので、自車Mが道路R13よりも優先道路となる道路R14、R15へ入ろうとしている、あるいは道路R14、R15を横切って道路R16へ入ろうとしている(すなわち、交差点Q5における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違う)と判断し、交差点案内を行う。
【0036】
また、図6に示したように、道路17から交差点Q6への進入に対する“指定方向外進行禁止(指定進行方向:左折)”の標示板SP2が設置され、道路17に指定されている進行方向が、一方向(すなわち、自車Mがルート案内に基づく矢印A4に従った場合の交差点Q6からの脱出方向)だけである。
【0037】
従って、別段、交差点案内を行わなくても、自車Mのドライバーが標示板SP2に表示されている指示に従いさえすれば良いこととなるので、交差点Q6における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ていると判断し、交差点案内を行わない。
【0038】
なお、当然のことではあるが、自車Mがルート案内に基づく矢印A4に従った場合における交差点Q6からの脱出方向(左折)については、前記指定進行方向に含まれる。というのは、ルート案内に基づく矢印A4に従った場合における交差点Q6からの脱出方向が、前記指定進行方向から外れるならば、交差点Q6がそもそも誘導ルートの通過ポイントとして選ばれないからである。
【0039】
このように、標示板に表示される前記道路標識情報に基づいて、交差点における通行が、ドライバーにとって、道なり走行の感覚と似ているか否か、すなわち、交差点案内が必要であるか否かを適切に判断することができる。従って、前記道路標識情報に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行うことにより、ドライバーを正しい方向へ誘導することができる。
【0040】
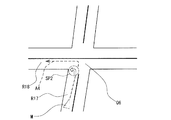
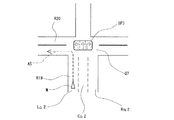
また、図7に示したように、道路R19から交差点Q7への進入に対する“進行方向別通行区分(左端車線:左折、中央車線:直進、右端車線:右折)”の標示板SP3が設置され、自車Mが道路R19の左端車線LCL2を走行し、ルート案内に基づく矢印A5に従って進み、道路R20へ脱出する場合、道路R19の左端車線LCL2に指定されている進行方向(左折)が一方向だけであり、なおかつ前記進行方向と、交差点Q7からの脱出方向(左折)とが一致するので、ドライバーが交差点Q7で左折すべきことを認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)と判断し、交差点案内を行わない。
【0041】
他方、自車Mが交差点Q7を左折するために、道路R19の左端車線LCL2へ進路変更していなければならないにも関わらず、今なお、自車Mが道路R19の中央車線CCL2や、右端車線RCL2を走行している場合には、道路R19の中央車線CCL2や、右端車線RCL2に指定されている進行方向(直進、右折)と、交差点Q7からの脱出方向(左折)とが一致しないので、ドライバーが交差点Q7で左折すべきことを認識していない(すなわち、交差点案内の必要がある)と判断し、交差点案内を行う。
【0042】
このように、標示板に表示される、車線毎に指定される進行方向情報に基づいて、交差点案内の要/不要の判断を自車が走行している車線毎に行うことができる。
【0043】
また本発明に係るナビゲーション装置(11)は、交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置において、車道に関連して設けられた構造物情報に基づいて、交差点案内の要/不要を判断する第3の要不要判断手段を備え、前記交差点案内手段が、前記第3の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0044】
また本発明に係るナビゲーション装置(12)は、上記ナビゲーション装置(11)において、前記構造物情報が、ガードレール情報、歩道情報、橋情報、高架情報、及びトンネル情報のうちのいずれかであることを特徴としている。
【0045】
また本発明に係るナビゲーション装置(13)は、上記ナビゲーション装置(12)において、前記構造物情報が、ガードレール情報、又は歩道情報であり、前記第3の要不要判断手段が、案内の要/不要の判断対象となる交差点に対する進入道路に関連して設けられているガードレール、又は歩道と、前記交差点に対する脱出道路に関連して設けられているガードレール、又は歩道とが繋がっているか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0046】
また本発明に係るナビゲーション装置(14)は、上記ナビゲーション装置(12)において、前記構造物情報が、橋情報、高架情報、及びトンネル情報のうちのいずれかであり、前記第3の要不要判断手段が、案内の要/不要の判断対象となる交差点に対する脱出道路が橋、高架、及びトンネルのうちのいずれかになっているか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴としている。
【0047】
上記したナビゲーション装置(11)〜(14)のいずれかによれば、車道に関連して設けられた構造物情報(例えば、ガードレール情報、歩道情報、橋情報、高架情報、トンネル情報)に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行う。
【0048】
例えば、図8に示したように、交差点Q8への自車Mの進入道路となる道路R21に沿って設けられているガードレールG1と、道路R22に沿って設けられているガードレールG2とが繋がっているので、自車Mがルート案内に基づく矢印A6に従って進む場合には、交差点Q8における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ていると判断し、交差点案内を行わない。
【0049】
他方、自車Mが別のルート案内に従って道路R23へ脱出する場合には、道路R21に沿って設けられているガードレールG1と、脱出道路となる道路R23に沿って設けられているガードレールG3とが繋がっていないので、交差点Q8における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行う。
【0050】
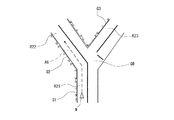
また、図9に示したように、交差点Q9への自車Mの進入道路となる道路R24に沿って設けられている歩道WR1と、道路R25に沿って設けられている歩道WR2とが繋がっているので、自車Mがルート案内に基づく矢印A7に従って進む場合には、交差点Q9における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ていると判断し、交差点案内を行わない。
【0051】
他方、自車Mが別のルート案内に従って道路R26へ脱出する場合には、道路R24に沿って設けられている歩道WR1と、脱出道路となる道路R26に沿って設けられている歩道WR3とが繋がっていないので、交差点Q9における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行う。
【0052】
このように、車道に関連して設けられた前記構造物情報に基づいて、交差点における通行が、ドライバーにとって、道なり走行の感覚と似ているか否か、すなわち、交差点案内が必要であるか否かを適切に判断することができる。従って、前記構造物情報に基づいて、交差点案内の要/不要を判断し、この判断結果に基づいて、交差点案内を行うことにより、ドライバーを正しい方向へ誘導することができる。
【0053】
また、図10に示したように、自車Mがルート案内に基づく矢印A8に従って進み、道路R28へ脱出する場合には、交差点Q10からの脱出先が橋B1となるので、交差点Q10における通行に、自車Mのドライバーが違和感を抱く虞れがあると判断し、交差点案内を行う。
【0054】
このように、車道に関連して設けられた前記構造物情報に基づいて、交差点における通行に、ドライバーが違和感を抱くか否かを適切に判断することができる。また、交差点からの脱出先については、橋となっている場合に限らず、高架やトンネルになっている場合にも、当該交差点における通行に、自車Mのドライバーが違和感を抱くと判断するようにしても良い。
【0055】
また本発明に係るナビゲーション装置(15)は、上記ナビゲーション装置(1)〜(14)のいずれかにおいて、前記道路標示情報、前記道路標識情報、及び前記構造物情報のうちのいずれかを、無線回線を通じて取得する情報取得手段を備え、前記第1〜第3の要不要判断手段が、前記情報取得手段により取得された情報に基づいて、交差点案内の要/不要を判断するものであることを特徴としている。
【0056】
上記したナビゲーション装置(15)によれば、交差点案内の要/不要の判断に利用する各種情報を車両外部より取得することができるため、道路工事等による情報の変化に対して素早く対応することが可能となる。従って、ドライバーに対してより適切な交差点案内を行うことができる。
【0057】
また本発明に係るナビゲーション装置(16)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する第4の要不要判断手段を備え、前記交差点案内手段が、前記第4の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0058】
上記ナビゲーション装置(16)によれば、交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯(いわゆる、ウィンカー)の点灯情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、前記予定通行経路で前記交差点を通行する際に、前記方向指示灯を点滅させるべきか否かの判断を行うことによって、交差点案内の要/不要を判断する。
【0059】
例えば、ドライバーが交差点をウィンカーを点滅させながら通行する場合というのは、その通行が、ドライバーにとって、道なり走行の感覚とは違うからと判断することができ、他方、ドライバーが交差点をウィンカーを点滅させずに通行する場合というのは、その通行が、ドライバーにとって、道なり走行の感覚と似ているからと判断することができる。
【0060】
従って、前記予定通行経路で前記交差点を通行する際に、ウィンカーを点滅させるべきである場合には、交差点案内を行い、他方、ウィンカーを点滅させるべきでない場合には、交差点案内を行わないようにすることができる。これにより、ドライバーの運転感覚に合うように、交差点案内を行ったり、行わなかったりすることができる。
【0061】
また本発明に係るナビゲーション装置(17)は、上記ナビゲーション装置(16)において、自車の前方を撮像する撮像手段によって得られた画像データに基づいて、交差点を通行するにあたっての先行車の方向指示灯の点灯状況と、前記先行車の前記交差点の通行経路とを求める第1の算出手段を備え、前記第4の要不要判断手段が、前記第1の算出手段による算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴としている。
【0062】
また本発明に係るナビゲーション装置(18)は、上記ナビゲーション装置(17)において、前記第4の要不要判断手段が、累積した前記算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴としている。
【0063】
上記ナビゲーション装置(17)によれば、自車の前方を撮像する撮像手段によって得られた画像データに基づいて求められる、交差点を通行するにあたっての先行車の方向指示灯の点灯状況と、前記先行車の前記交差点の通行経路とを用いて、ウィンカーを点滅させながら交差点を通行すべきか否かの判断を行うことによって、交差点案内の要/不要を判断する。
【0064】
すなわち、前記先行車がウィンカーを点滅させながら、交差点を通行したか否かといった事実に基づいて、交差点案内の要/不要の判断を行うので、ドライバーの運転感覚に非常に近いかたちで、交差点案内を行ったり、行わなかったりすることができる。
【0065】
さらに、上記ナビゲーション装置(18)によれば、前記画像データに基づいて求められる算出結果を累積したものを用いて、交差点案内の要/不要の判断を行うので、より一層適したかたちで、交差点案内を行ったり、行わなかったりすることができる。
【0066】
また本発明に係るナビゲーション装置(19)は、上記ナビゲーション装置(16)において、交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報を、無線回線を通じて取得する第2の情報取得手段を備え、前記第4の要不要判断手段が、前記第2の情報取得手段により取得された前記情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴としている。
【0067】
上記ナビゲーション装置(19)によれば、交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報を、無線回線を通じて外部より取得することができるため、前記方向指示灯の点灯情報が記憶されたメモリや、自車の前方を撮像する撮像手段を自車に装備する必要がなく、また、該撮像手段によって得られる画像データに基づく算出処理などを行わなくても済むようにすることができる。
【0068】
また本発明に係るナビゲーション装置(20)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、交差点の通行経路に対応した、交差点案内の要/不要に関する情報を、無線回線を通じて取得する第3の情報取得手段と、前記第3の情報取得手段により取得された前記情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する第5の要不要判断手段とを備えていることを特徴としている。
【0069】
上記ナビゲーション装置(20)によれば、交差点の通行経路に対応した、交差点案内の要/不要に関する情報を、無線回線を通じて外部より取得することができるため、前記方向指示灯の点灯情報が記憶されたメモリや、自車の前方を撮像する撮像手段を自車に装備する必要がないことはもちろんのこと、外部より取得した情報からダイレクトに、交差点案内の要/不要の判断を行うことができるので、効率良く前記判断を行うことができる。
【0070】
また本発明に係るナビゲーション装置(21)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、交差点への進入道路の制限速度に関する情報、及び前記交差点からの脱出道路の制限速度に関する情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する第6の要不要判断手段を備え、前記交差点案内手段が、前記第6の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0071】
上記ナビゲーション装置(21)によれば、交差点への進入道路の制限速度に関する情報、及び前記交差点からの脱出道路の制限速度に関する情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、例えば、交差点への予定進入道路の制限速度が所定の速度以上であり、また、前記交差点からの予定脱出道路の制限速度が同じく前記所定の速度以上であるか否かの判断などを行うことによって、交差点案内の要/不要を判断する。
【0072】
例えば、自車における交差点への予定進入道路の制限速度が所定の速度(例えば、60km/h)以上であり、さらに、前記交差点からの脱出道路の制限速度が同じく前記所定の速度以上であると判断すれば、自車は前記交差点へ進入する前も、脱出してからも幹線道路や高速道路の本線車道などを走行する(すなわち、その通行が、ドライバーにとって、道なり走行の感覚と似ている)とし、交差点案内を行わないようにすることができる。これにより、ドライバーの運転感覚に合うように、交差点案内を行ったり、行わなかったりすることができる。
【0073】
また本発明に係るナビゲーション装置(22)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、自車の交差点からの予定脱出道路に関する情報と、自車の速度情報と、前記予定脱出道路を走行する先行車の速度情報、又は自車との相対速度情報とに基づいて、交差点案内の要/不要を判断する第7の要不要判断手段を備え、前記交差点案内手段が、前記第7の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0074】
上記ナビゲーション装置(22)によれば、自車の交差点からの予定脱出道路に関する情報と、自車の速度情報と、前記予定脱出道路を走行する先行車の速度情報、又は自車との相対速度情報とに基づいて、例えば、交差点への進入道路を走行している車両の速度(ここでは自車の速度)と、前記交差点からの予定脱出道路を走行している車両の速度(ここでは先行車の速度)との関係に基づいて、交差点案内の要/不要を判断する。
【0075】
例えば、自車における交差点への進入前の速度が所定の速度(例えば、60km/h)以上であり、さらに、前記交差点からの脱出道路で走行している先行車の速度が同じく所定の速度(例えば、60km/h)以上である(又は前記先行車が自車と略同じ速度で走行している)と判断すれば、自車は前記交差点へ進入する前も、脱出してからも幅員の広い幹線道路や高速道路の本線車道などを走行する(すなわち、前記交差点の通行が、ドライバーにとって、道なり走行の感覚と似ている)とし、交差点案内を行わないようにすることができる。これにより、ドライバーの運転感覚に合うように、交差点案内を行ったり、行わなかったりすることができる。
【0076】
また本発明に係るナビゲーション装置(23)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、地図を表す画像データから交差点への進入道路の幅員、及び前記交差点からの脱出道路の幅員を求める第2の算出手段と、該第2の算出手段による算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する第8の要不要判断手段を備え、前記交差点案内手段が、前記第8の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0077】
従来のナビゲーション装置では、道路データ記憶媒体に記憶されている道路データを用いて、画面上に道路を表示したり、目的地までのルート案内を行ったりしている。また、前記道路データには道路の幅員情報なども含まれれており、この幅員情報を用いて、交差点案内の要/不要の判断を行うことができ、例えば、交差点を通行することによって、幅員の広い道路から幅員の狭い道路に移る場合には、交差点案内を行うようにしていた。
【0078】
ところで、最近、前記道路データではなく、地図を表す画像データ(例えば、衛星写真データやイメージ地図等のラスタ地図)を用いて、画面上に道路を表示したり、ルート案内を行ったりすることのできるナビゲーション装置が提案されている。
【0079】
しかしながら、前記画像データは単に地図を表す画像のデータ(ビットマップデータ)にすぎないため、幅員情報は含まれておらず、そのため、道路の幅員に基づいて、交差点案内の要/不要の判断を行うといったことができないといった問題があった。
【0080】
上記ナビゲーション装置(23)によれば、地図を表す画像データから交差点への進入道路の幅員、及び前記交差点からの脱出道路の幅員を求める第2の算出手段を備えているので、前記画像データから道路の幅員を求めることができ、さらに、前記第2の算出手段による算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、例えば、交差点を通行するにあたって、該交差点への進入道路の幅員と、前記交差点からの脱出道路の幅員との関係に基づいて、交差点案内の要/不要を判断することができる。よって、従来からの道路データではなく、地図を表す画像データを用いたとしても、交差点案内の要/不要の判断を適切に行うことができる。
【0081】
また本発明に係るナビゲーション装置(24)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、道路の勾配に関する情報と、交差点の位置情報とに基づいて、交差点案内の要/不要を判断する第9の要不要判断手段を備え、前記交差点案内手段が、前記第9の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0082】
また本発明に係るナビゲーション装置(25)は、交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、時間帯情報、及び/又は気象情報に基づいて、交差点案内の要/不要を判断する第10の要不要判断手段を備え、前記交差点案内手段が、前記第10の要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴としている。
【0083】
上記ナビゲーション装置(1)〜(23)では、例えば、道路標示情報に基づいて、交差点への進入道路の表面に記されている中央線と、前記交差点からの脱出道路の表面に記されている中央線とが繋がっているか否かを判断し、これら中央線が繋がっていると判断すれば、前記交差点における通行が、ドライバーにとって、道なり走行の感覚に似ていると判断し、交差点案内を行わないようになっている。
【0084】
ところが、これら中央線が繋がっていたとしても、前記交差点における通行が、道なり走行の感覚と似ているとは言えない場合がある。それは、例えば、急な勾配の坂道を上り切ったすぐ先のところに交差点があるような場合や、夜間走行や雨天候走行などの場合である。
【0085】
上記ナビゲーション装置(24)によれば、道路の勾配に関する情報と、交差点の位置情報とに基づいて、例えば、急な坂道を上り切ったすぐ先のところに、交差点が存在するか否かを判断することによって、交差点案内の要/不要を判断する。
【0086】
例えば、急な勾配の坂道を上り切ったすぐ先のところに、交差点が存在しない場合には、その他の条件に基づいて、交差点案内の要/不要を判断し、その判断結果に基づいて、交差点の案内を行ったり、行わなかったりし、他方、急な勾配の坂道を上り切ったすぐ先のところに、交差点が存在する場合には、交差点案内を行う。すなわち、急な勾配の坂道を上り切ったすぐ先のところに、交差点が存在する場合には、その他の条件によれば、交差点案内が不要と判断される場合であったとしても、交差点案内を行うようにすることができる。これにより、上記問題を解決することができる。
【0087】
また、上記ナビゲーション装置(25)によれば、時間帯情報、及び/又は気象情報に基づいて、例えば、夜間走行であるか否かを判断したり、雨天候であるか否かを判断することによって、交差点案内の要/不要を判断する。
【0088】
従って、例えば、昼間走行や晴天候走行の場合には、その他の条件に基づいて、交差点案内の要/不要を判断し、その判断結果に基づいて、交差点の案内を行ったり、行わなかったりし、他方、夜間走行や雨天候走行の場合には、交差点案内を行うようにすることができる。すなわち、夜間走行や雨天候走行の場合には、その他の条件によれば、交差点案内が不要と判断される場合であったとしても、交差点案内を行うようにすることができる。これにより、上記問題を解決することができる。
【0091】
【発明の実施の形態】
以下、本発明に係るナビゲーション装置の実施の形態を図面に基づいて説明する。
【0092】
図11は実施の形態(1)に係るナビゲーション装置の要部を概略的に示したブロック図である。但し、ここでは図30に示したナビゲーション装置と同様の構成部分については同符号を付し、その説明を省略する。
【0093】
図11に示したナビゲーション装置においては、車速から演算して走行距離を取得するための車速センサ2と、進行方向を取得するためのジャイロセンサ3とがマイコン11に接続されており、マイコン11は、演算した走行距離、及び進行方向に基づいて自車位置を割り出すようになっている(自律航法)。また、GPS受信機4がマイコン11に接続されており、マイコン11は、GPS信号に基づいて自車位置を割り出すようになっている(GPS航法)。
【0094】
また、DVD−ROM(CD−ROMなどの記憶装置も可能)17には道路データ等が記憶されている。図12に、DVD−ROM17に記憶されている道路ネットワークデータにおけるデータ構造の一例を示す。
【0095】
図12に示したように、DVD−ROM17には、従来のDVD−ROM7(図31)と違って、リンクレコードとして、一時停止要不要情報、車線数、橋情報、高架情報、及びトンネル情報が追加され、リンク間情報レコードとして、中央線接続情報、車道と路側帯との境を示す車道路側帯境界線接続情報、指定方向外進行禁止情報、進行方向別通行区分情報、ガードレール接続情報、及び歩道接続情報が追加されている。
【0096】
リンクレコードとして記憶される、一時停止要不要情報は、該当するリンク(道路)の表面に停止線(例えば、停止線SL1(図3))が記されているか否かといったことや、前記道路からの脱出(換言すれば、交差点への進入)に対する“一時停止”の標示板(例えば、標示板SP1(図5))が設置されているか否かといったことを示す情報であり、車線数は、道路に含まれる車線数のことであり、橋情報、高架情報やトンネル情報は、該当するリンクに対応する道路が橋(例えば、橋B1(図10))、高架やトンネルとなっているか否かといったことを示す情報である。
【0097】
他方、リンク間情報レコードとして記憶される、中央線接続情報、車道路側帯境界線接続情報、ガードレール情報や歩道情報は、該当する2つのリンク(道路)が中央線(例えば、中央線CL1(図1))、境界線(例えば、境界線BL1(図2))、ガードレール(例えば、ガードレールG1(図8))や歩道WR1(例えば、歩道WR1(図9))で結ばれているか否かといったことを示す情報である。
【0098】
また、指定方向外進行禁止情報は、該当する2つのリンク(道路)のうちの一方の道路から他方の道路へ進入が可能であるか否かといったことを示す情報であり、進行方向別通行区分情報は、該当する2つのリンク(道路)のうち、一方の道路の車線毎に、他方の道路へ進入が可能であるか否かといったことを示す情報である。
【0099】
なお、道路ネットワークデータは不変ではないので、将来的には道路ネットワークデータが記憶されたデータベースを有し、各ユーザーからの要求により、前記道路ネットワークデータを無線回線を通じて提供することのできるデータ提供装置が装備されたサービス機関が出現するものと思われる。
【0100】
このようなサービス機関から前記道路ネットワークデータを取得するには、ナビゲーション装置に、前記データ提供装置にアクセスして、前記道路ネットワークデータを受信することのできる機能を装備すれば良く、これにより、ユーザーは最新の前記道路ネットワークデータを取得することが可能となる。
【0101】
また、マイコン11には、DVDドライブ6が接続されており、マイコン11は、割り出した自車位置と道路データとを合わせる(いわゆる、マップマッチング処理を行う)ことによって、自車位置が正確に示された地図を表示パネル9bへ表示するようになっている。
【0102】
また、リモコン8に設けられたジョイスティック8aやボタンスイッチ8bから出力されたスイッチ信号や、表示装置9に設けられたボタンスイッチ9aから出力されたスイッチ信号がマイコン11に入力され、これらスイッチ信号に応じた処理がマイコン11で行われるようになっている。例えば、マイコン11は、これらスイッチから移動目的地の情報を取り込むと、自車位置から目的地までの最適ルートを探索し、これを誘導ルートとして地図と共に表示パネル9b上に表示するようになっている。
【0103】
次に、実施の形態(1)に係るナビゲーション装置におけるマイコン11の行う処理動作▲1▼を、図13に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS1)、交差点に接近していないと判断すれば、処理動作▲1▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路の表面に記されている中央線(例えば、中央線CL1(図1))と、前記交差点からの自車の脱出道路の表面に記されている中央線(例えば、中央線CL2(図1))とが繋がっているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「中央線接続情報」に基づいて判断する(ステップS2)。
【0104】
前記交差点への自車の進入道路の表面に記されている中央線と、前記交差点からの自車の脱出道路の表面に記されている中央線とが繋がっていると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップS3)。一方、これら中央線が繋がっていないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップS4)。
【0105】
例えば、図1に示したように、道路R1の表面に記されている中央線CL1と、道路R2の表面に記されている中央線CL2とが繋がっているので、自車Mがルート案内に基づく矢印A1に従って進む場合には、交差点Q1における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わない決定をする。
【0106】
他方、自車Mが別のルート案内に従って道路R3へ脱出する場合には、道路R1の表面に記されている中央線CL1と、脱出道路となる道路R3の表面に記されている中央線CL3とが繋がっていないので、交差点Q1における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行う決定をする。
【0107】
なお、上記実施の形態(1)に係るナビゲーション装置では、交差点への自車の進入道路の表面に記されている中央線と、前記交差点からの自車の脱出道路の表面に記されている中央線とが繋がっているか否かを判断することにより、交差点案内の要/不要を決定しているが、別の実施の形態に係るナビゲーション装置では、前記交差点への自車の進入道路の表面に記されている、車道と路側帯との境を示す境界線(例えば、境界線BL1(図2))と、前記交差点からの自車の脱出道路の表面に記されている、車道と路側帯との境を示す境界線(例えば、境界線BL2(図2))とが繋がっているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「車道路側帯境界線接続情報」に基づいて判断することにより、交差点案内の要/不要を決定しても良い。
【0108】
次に、実施の形態(2)に係るナビゲーション装置について説明する。但し、実施の形態(2)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0109】
実施の形態(2)に係るナビゲーション装置におけるマイコン11Aの行う処理動作▲2▼を、図14に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS11)、交差点に接近していないと判断すれば、処理動作▲2▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路の表面に停止線(例えば、停止線SL1(図3))が記されているか否かを、道路ネットワークデータにおけるリンクレコードの「一時停止要不要情報」に基づいて判断する(ステップS12)。
【0110】
前記交差点への自車の進入道路の表面に前記停止線が記されていると判断すれば、交差点案内を行うことを決定し(ステップS15)、一方、前記停止線が記されていないと判断すれば、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップS13)。なお、前記脱出角度の算出方法としては、例えば、前記進入道路の始点ノード、前記進入道路の終点ノード(前記脱出道路の始点ノード)、及び前記脱出道路の終点ノードそれぞれの位置情報から算出する方法が挙げられる。
【0111】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップS14)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記進入道路に前記停止線が記されていなかったとしても、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップS15)。
【0112】
例えば、図3に示したように、自車Mが道路R7を通って交差点Q3に接近している場合、交差点Q3への自車Mの進入道路となる道路R7の表面に停止線SL1が記されているので、自車Mが道路R7よりも優先道路となる道路R8、R9へ入ろうとしている、あるいは道路R8、R9を横切って道路R10へ入ろうとしている(すなわち、交差点Q3における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違う)とし、交差点案内を行う決定をする。
【0113】
次に、実施の形態(3)に係るナビゲーション装置について説明する。但し、実施の形態(3)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0114】
実施の形態(3)に係るナビゲーション装置におけるマイコン11Bの行う処理動作▲3▼を、図15に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS21)、交差点に接近していないと判断すれば、処理動作▲3▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路に車線が2以上存在するか否かを、道路ネットワークデータにおけるリンクレコードの「車線数」に基づいて判断し(ステップS22)、車線数が2以上でないと判断すれば、処理動作▲3▼を終了する。
【0115】
一方、車線数が2以上であると判断すれば、自車が走行している車線の表面に記されている進行方向(例えば、進行方向LA 1(図4))が、一方向だけを示しているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「進行方向別通行区分情報」に基づいて判断し(ステップS23)、前記進行方向が一方向だけでないと判断すれば、交差点案内を行う決定をし(ステップS26)、他方、前記進行方向が一方向だけであると判断すれば、前記進行方向と、前記交差点からの脱出方向とが一致するか否かを、道路ネットワークデータにおけるリンク間情報レコードの「進行方向別通行区分情報」に基づいて判断する(ステップS24)。
【0116】
前記進行方向と、前記交差点からの脱出方向とが一致すると判断すれば、自車のドライバーが前記交差点での脱出方向を認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)とし、交差点案内を行わない決定をする(ステップS25)。一方、一致しないと判断すれば、自車のドライバーは前記交差点での脱出方向を認識していないとし、交差点案内を行う決定をする(ステップS26)。
【0117】
例えば、図4に示したように、自車Mが道路R11の左端車線LCL1を走行し、ルート案内に基づく矢印A3に従って進み、道路R12へ脱出する場合、道路R11の左端車線LCL1の表面に記されている(一方向だけを示す)進行方向LA 1(左折)と、交差点Q4からの脱出方向(左折)とが一致するので、ドライバーが交差点Q4で左折すべきことを認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)とし、交差点案内を行わない決定をする。
【0118】
他方、自車Mが交差点Q4を左折するために、道路R11の左端車線LCL1へ進路変更していなければならないにも関わらず、今なお、自車Mが道路R11の中央車線CCL1や、右端車線RCL1を走行している場合には、道路R11の中央車線CCL1や、右端車線RCL1の表面に記されている進行方向CA 1(直進)や、進行方向RA 1(右折)が示す方向と、交差点Q4からの脱出方向(左折)とが一致しないので、ドライバーが交差点Q4で左折すべきことを認識していない(すなわち、交差点案内の必要がある)とし、交差点案内を行う決定をする。
【0119】
なお、上記実施の形態(3)に係るナビゲーション装置では、ステップS22における判断処理で、車線数が2以上でない、すなわち車線数が1のときには、処理動作▲3▼を終了し、処理動作▲3▼の中では交差点案内の要不要の判定を行わないようになっているが、別の実施の形態に係るナビゲーション装置では、ステップS22の後に、別の判断処理ステップを設けて、車線数が1の場合についても、交差点案内の要不要の判定を行うようにしても良い。
【0120】
例えば、交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断し、前記脱出角度が前記所定の角度以内であると判断すれば、交差点案内を行わないことを決定し、一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記進入道路の車線数が1であったとしても、交差点案内を行うことを決定する。
【0121】
次に、実施の形態(4)に係るナビゲーション装置について説明する。但し、実施の形態(4)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0122】
実施の形態(4)に係るナビゲーション装置におけるマイコン11Cの行う処理動作▲4▼を、図16に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS31)、交差点に接近していないと判断すれば、処理動作▲4▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への進入に対する“一時停止”の標示板(例えば、標示板SP1(図5))が設置されているか否かを、道路ネットワークデータにおけるリンクレコードの「一時停止要不要情報」に基づいて判断する(ステップS32)。
【0123】
前記交差点への進入に対する“一時停止”の標示板が設置されていると判断すれば、交差点案内を行うことを決定する(ステップS35)。一方、前記“一時停止”の標示板が設置されていないと判断すれば、前記交差点に対する進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップS33)。
【0124】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップS34)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点への進入に対する“一時停止”の標示板が設置されていなかったとしても、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップS35)。
【0125】
例えば、図5に示したように、自車Mが道路R13を通って交差点Q5に接近している場合、交差点Q5への進入に対する“一時停止”の標示板SP1が設置されているので、自車Mが道路R13よりも優先道路となる道路R14、R15へ入ろうとしている、あるいは道路R14、R15を横切って道路R16へ入ろうとしている(すなわち、交差点Q5における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違う)とし、交差点案内を行う決定をする。
【0126】
次に、実施の形態(5)に係るナビゲーション装置について説明する。但し、実施の形態(5)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0127】
実施の形態(5)に係るナビゲーション装置におけるマイコン11Dの行う処理動作▲5▼を、図17に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS41)、交差点に接近していないと判断すれば、処理動作▲5▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への進入に対する“指定方向外進行禁止”の標示板(例えば、標示板SP2(図6))が設置され、前記交差点への進入道路に指定されている進行方向が、一方向だけを示しているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「指定方向外進行禁止情報」に基づいて判断する(ステップS42)。
【0128】
前記進入道路に指定されている進行方向が一方向だけを示していると判断すれば、別段、交差点案内を行わなくても良いこととなるので、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わない決定をする(ステップS43)。一方、前記進行方向が一方向だけを示しているのではないと判断すれば、交差点案内を行う決定をする(ステップS44)。
【0129】
例えば、図6に示したように、道路17から交差点Q6への進入に対する“指定方向外進行禁止(指定進行方向:左折)”の標示板SP2が設置され、道路17に指定されている進行方向が、一方向(すなわち、自車Mがルート案内に基づく矢印A4に従った場合の交差点Q6からの脱出方向)だけである。
【0130】
従って、別段、交差点案内を行わなくても、自車Mのドライバーが標示板SP2に表示されている指示に従いさえすれば良いこととなるので、交差点Q6における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わない決定をする。
【0131】
なお、当然のことではあるが、自車Mがルート案内に基づく矢印A4に従った場合における交差点Q6からの脱出方向(左折)については、前記指定進行方向に含まれる。というのは、ルート案内に基づく矢印A4に従った場合における交差点Q6からの脱出方向が、前記指定進行方向から外れるならば、交差点Q6がそもそも誘導ルートの通過ポイントとして選ばれないからである。
【0132】
次に、実施の形態(6)に係るナビゲーション装置について説明する。但し、実施の形態(6)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0133】
実施の形態(6)に係るナビゲーション装置におけるマイコン11Eの行う処理動作▲6▼を、図18に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS51)、交差点に接近していないと判断すれば、処理動作▲6▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路に車線が2以上存在するか否かを、道路ネットワークデータにおけるリンクレコードの「車線数」に基づいて判断し(ステップS52)、車線数が2以上でないと判断すれば、処理動作▲6▼を終了する。
【0134】
一方、車線数が2以上であると判断すれば、前記交差点への進入に対する“進行方向別通行区分”の標示板(例えば、標示板SP3(図7))が設置され、自車が走行している車線に指定されている進行方向が、一方向だけを示しているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「進行方向別通行区分情報」に基づいて判断する(ステップS53)。
【0135】
前記進行方向が一方向だけを示しているのではないと判断すれば、交差点案内を行う決定をし(ステップS56)、一方、前記進行方向が一方向だけを示していると判断すれば、前記進行方向と、前記交差点からの脱出方向とが一致するか否かを、道路ネットワークデータにおけるリンク間情報レコードの「進行方向別通行区分情報」に基づいて判断する(ステップS54)。
【0136】
前記進行方向と、前記交差点からの脱出方向とが一致すると判断すれば、自車のドライバーが前記交差点での脱出方向を認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)とし、交差点案内を行わない決定をする(ステップS55)。一方、一致しないと判断すれば、自車のドライバーは前記交差点での脱出方向を認識していないとし、交差点案内を行う決定をする(ステップS56)。
【0137】
例えば、図7に示したように、道路R19から交差点Q7への進入に対する“進行方向別通行区分(左端車線:左折、中央車線:直進、右端車線:右折)”の標示板SP3が設置され、自車Mが道路R19の左端車線LCL2を走行し、ルート案内に基づく矢印A5に従って進み、道路R20へ脱出する場合、道路R19の左端車線LCL2に指定されている進行方向(左折)が一方向だけであり、なおかつ前記進行方向と、交差点Q7からの脱出方向(左折)とが一致するので、ドライバーが交差点Q7で左折すべきことを認識済みで、既に進路変更を完了している(すなわち、交差点案内の必要がない)とし、交差点案内を行わない決定をする。
【0138】
他方、自車Mが交差点Q7を左折するために、道路R19の左端車線LCL2へ進路変更していなければならないにも関わらず、今なお、自車Mが道路R19の中央車線CCL2や、右端車線RCL2を走行している場合には、道路R19の中央車線CCL2や、右端車線RCL2に指定されている進行方向(直進、右折)と、交差点Q7からの脱出方向(左折)とが一致しないので、ドライバーが交差点Q7で左折すべきことを認識していない(すなわち、交差点案内の必要がある)とし、交差点案内を行う決定をする。
【0139】
なお、上記実施の形態(6)に係るナビゲーション装置では、ステップS52における判断処理で、車線数が2以上でない、すなわち車線数が1のときには、処理動作▲6▼を終了し、処理動作▲6▼の中では交差点案内の要不要の判定を行わないようになっているが、別の実施の形態に係るナビゲーション装置では、ステップS52の後に、別の判断処理ステップを設けて、車線数が1の場合についても、交差点案内の要不要の判定を行うようにしても良い。
【0140】
例えば、交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断し、前記脱出角度が前記所定の角度以内であると判断すれば、交差点案内を行わないことを決定し、一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記進入道路の車線数が1であったとしても、交差点案内を行うことを決定する。
【0141】
次に、実施の形態(7)に係るナビゲーション装置について説明する。但し、実施の形態(7)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0142】
実施の形態(7)に係るナビゲーション装置におけるマイコン11Fの行う処理動作▲7▼を、図19に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS61)、交差点に接近していないと判断すれば、処理動作▲7▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路に沿って設けられているガードレール(例えば、ガードレールG1(図8))と、前記交差点からの自車の脱出道路に沿って設けられているガードレール(例えば、ガードレールG2(図8))とが繋がっているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「ガードレール接続情報」に基づいて判断する(ステップS62)。
【0143】
前記交差点への自車の進入道路に沿って設けられているガードレールと、前記交差点からの自車の脱出道路に沿って設けられているガードレールとが繋がっていると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップS63)。一方、これらガードレールが繋がっていないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップS64)。
【0144】
例えば、図8に示したように、道路R21に沿って設けられているガードレールG1と、道路R22に沿って設けられているガードレールG2とが繋がっているので、自車Mがルート案内に基づく矢印A6に従って進む場合には、交差点Q8における通行が、自車Mのドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わない決定をする。
【0145】
他方、自車Mが別のルート案内に従って道路R23へ脱出する場合には、道路R21に沿って設けられているガードレールG1と、脱出道路となる道路R23に沿って設けられているガードレールG3とが繋がっていないので、交差点Q8における通行が、自車Mのドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行う決定をする。
【0146】
なお、上記実施の形態(7)に係るナビゲーション装置では、交差点への自車の進入道路に沿って設けられているガードレールと、前記交差点からの自車の脱出道路に沿って設けられているガードレールとが繋がっているか否かを判断することにより、交差点案内の要/不要を決定しているが、別の実施の形態に係るナビゲーション装置では、前記交差点への自車の進入道路に沿って設けられている歩道(例えば、歩道WR1(図9))と、前記交差点からの自車の脱出道路に沿って設けられている歩道(例えば、歩道WR2(図9))とが繋がっているか否かを、道路ネットワークデータにおけるリンク間情報レコードの「歩道接続情報」に基づいて判断することにより、交差点案内の要/不要を決定しても良い。
【0147】
次に、実施の形態(8)に係るナビゲーション装置について説明する。但し、実施の形態(8)に係るナビゲーション装置の構成については、マイコン11を除いて、図11に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0148】
実施の形態(8)に係るナビゲーション装置におけるマイコン11Gの行う処理動作▲8▼を、図20に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップS71)、交差点に接近していないと判断すれば、処理動作▲8▼を終了する。一方、交差点に接近していると判断すれば、前記交差点からの自車の脱出先が橋(例えば、橋B1(図10))となっているか否かを、道路ネットワークデータにおけるリンクレコードの「橋情報」に基づいて判断する(ステップS72)。
【0149】
前記交差点からの自車の脱出先が橋となっていると判断すれば、前記交差点における通行に、自車のドライバーが違和感を抱く虞れがあるとし、交差点案内を行うことを決定する(ステップS75)。一方、橋となっていないと判断すれば、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップS73)。
【0150】
前記脱出角度が、前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップS74)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点からの脱出先が橋でなかったとしても、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップS75)。
【0151】
例えば、図10に示したように、自車Mがルート案内に基づく矢印A8に従って進み、道路R28へ脱出する場合には、交差点Q10からの脱出先が橋B1となるので、交差点Q10における通行に、自車Mのドライバーが違和感を抱く虞れがあるとし、交差点案内を行う決定をする。
【0152】
なお、上記実施の形態(8)に係るナビゲーション装置では、交差点からの自車の脱出先が橋となっているか否かを判断することにより、交差点案内の要/不要を決定しているが、別の実施の形態に係るナビゲーション装置では、前記交差点からの自車の脱出先が高架やトンネルになっているか否かを、道路ネットワークデータにおけるリンクレコードの「高架情報」や「トンネル情報」に基づいて判断することにより、交差点案内の要/不要を決定しても良い。
【0153】
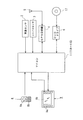
図21は実施の形態(9)に係るナビゲーション装置の要部を概略的に示したブロック図である。但し、ここでは図30に示したナビゲーション装置と同様の構成部分については同符号を付し、その説明を省略する。
【0154】
図21に示したナビゲーション装置においては、車速から演算して走行距離を取得するための車速センサ2と、進行方向を取得するためのジャイロセンサ3とがマイコン21に接続されており、マイコン21は、演算した走行距離、及び進行方向に基づいて自車位置を割り出すようになっている(自律航法)。また、GPS受信機4がマイコン21に接続されており、マイコン21は、GPS信号に基づいて自車位置を割り出すようになっている(GPS航法)。
【0155】
また、マイコン21には、DVDドライブ6が接続されており、マイコン21は、割り出した自車位置と道路データとを合わせる(いわゆる、マップマッチング処理を行う)ことによって、自車位置が正確に示された地図を表示パネル9bへ表示するようになっている。
【0156】
また、マイコン21には自車の前方を撮像するCCDカメラなどからなる撮像装置22が接続されており、撮像装置22によって得られた画像データが与えられるようになっている。撮像装置22は、主として先行車の後部を撮像するものであり、同一車線上を先行する先行車のウィンカーを捕捉することができるようになっている。
【0157】
また、マイコン21は撮像装置22によって得られた画像データに基づいて、先行車を追跡するように撮像装置22の駆動を制御すると共に、先行車のウィンカーの点滅状態を監視することができるようになっている。
【0158】
次に、実施の形態(9)に係るナビゲーション装置におけるマイコン21の行う処理動作T▲1▼を、図22に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップT1)、交差点に接近していないと判断すれば、処理動作T▲1▼を終了する。一方、交差点に接近していると判断すれば、撮像装置22のカメラ電源をONにし(ステップT2)、次に、撮像装置22によって得られる画像データに基づいて、同一車線上を先行する先行車が存在するか否かを判断する(ステップT3)。
【0159】
先行車が存在すると判断すれば、撮像装置22によって得られる画像データに基づいて、前記先行車のウィンカーが点滅しているか否かを判断し(ステップT4)、ウィンカーが点滅していると判断すれば、フラグfを1にして(ステップT5)、その後、ステップT6へ進む。一方、ウィンカーが点滅していないと判断すれば、ステップT5を飛ばして(すなわち、フラグfを1にせずに)、そのままステップT6へ進む。
【0160】
ステップT6では、前記先行車が自車の予定ルートと同じルートで前記交差点を通行したか否かを判断し、前記先行車が同じルートで前記交差点を通行したと判断すれば、まず、撮像装置22のカメラ電源をOFFにして(ステップT7)、次に、フラグfが1であるか否かを判断する(ステップT8)。
【0161】
フラグfが1である(すなわち、前記先行車がウィンカーを点滅させながら、自車の予定ルートと同じルートで前記交差点を通行した)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定し(ステップT9)、その後、フラグfを0にする(ステップT10)。
【0162】
一方、フラグfが1でない(すなわち、前記先行車がウィンカーを点滅させずに、自車の予定ルートと同じルートで前記交差点を通行した)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT11)。
【0163】
また、ステップT3において、同一車線上を先行する先行車が存在しないと判断したり、ステップT6において、先行車が自車の予定ルートとは異なるルートで前記交差点を通行したと判断すれば、交差点案内の要/不要の判断を行うことができないので、撮像装置22のカメラ電源をOFFにし(ステップT12)、フラグfを0にして(ステップT13)、次に、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップT14)。
【0164】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT15)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップT16)。
【0165】
上記実施の形態(9)に係るナビゲーション装置によれば、同一車線上を先行する先行車が、ウィンカーを点滅させながら、自車の予定ルートと同じルートで交差点を通行したか否かに基づいて、交差点案内の要/不要を判断するので、ドライバーの運転感覚に非常に近いかたちで、交差点案内を行ったり、行わなかったりすることができる。
【0166】
次に、実施の形態(10)に係るナビゲーション装置について説明する。但し、実施の形態(10)に係るナビゲーション装置の構成については、マイコン21を除いて、図21に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0167】
実施の形態(10)に係るナビゲーション装置におけるマイコン21Aの行う処理動作T▲2▼を、図23に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップT21)、交差点に接近していないと判断すれば、処理動作T▲2▼を終了する。一方、交差点に接近していると判断すれば、撮像装置22のカメラ電源をONにし(ステップT22)、次に、撮像装置22によって得られる画像データに基づいて、同一車線上を先行する先行車が存在するか否かを判断する(ステップT23)。
【0168】
先行車が存在すると判断すれば、撮像装置22によって得られる画像データに基づいて、前記先行車のウィンカーが点滅しているか否かを判断し(ステップT24)、ウィンカーが点滅していると判断すれば、フラグfを1にして(ステップT25)、その後、ステップT26へ進む。一方、ウィンカーが点滅していないと判断すれば、ステップT25を飛ばして(すなわち、フラグfを1にせずに)、そのままステップT26へ進む。
【0169】
ステップT26では、前記先行車が前記交差点を通行したか否かを判断し、前記先行車が前記交差点を通行したと判断すれば、撮像装置22によって得られる画像データに基づいて、前記先行車がどのルートで前記交差点を通行したのかを求め(ステップT27)、その後、撮像装置22のカメラ電源をOFFにする(ステップT28)。一方、前記先行車が前記交差点をまだ通行していないと判断すれば、ステップT26へ戻る。
【0170】
次に、フラグfが1であるか否かを判断し(ステップT29)、フラグfが1である(すなわち、前記先行車がウィンカーを点滅させながら、前記交差点を通行した)と判断すれば、前記先行車が通行した交差点と、ステップT27で求めた通行ルート(前記交差点への進入道路、及び前記交差点からの脱出道路)とに対応するカウンタCK に1を加算し(ステップT30)、フラグfを0にして(ステップT31)、その後、ステップT33へ進む。なお、カウンタCK については、マイコン21A内のメモリ(図示せず)や、マイコン21Aに接続する記憶装置(図示せず)などに記憶させれば良い。
【0171】
一方、ステップT29において、フラグfが1でない(すなわち、前記先行車がウィンカーを点滅させずに、前記交差点を通行した)と判断すれば、前記先行車が通行した交差点と、ステップT27で求めた通行ルート(前記交差点への進入道路、及び前記交差点からの脱出道路)とに対応するカウンタCK から1を減算し(ステップT32)、その後、ステップT33へ進む。
【0172】
すなわち、これら処理動作(ステップT30、T32)により、過去の実績において、ウィンカーを点滅させながら通行する車両が多かった場合には、カウンタCK は正数となり、逆に、ウィンカーを点滅させずに通行する車両が多かった場合には、カウンタCK は負数となる。
【0173】
ステップT33では、自車の予定ルートに対応するカウンタCS を読み出し、次に、読み出したカウンタCS が1以上であるか否かを判断し(ステップT34)、カウンタCS が1以上である(すなわち、過去の実績において、ウィンカーを点滅させながら、自車の予定ルートと同じルートで前記交差点を通行した車両が多かった)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップT35)。
【0174】
一方、カウンタCS が1以上でないと判断すれば、カウンタCS が0未満であるか否かを判断し(ステップT36)、カウンタCS が0未満である(すなわち、過去の実績において、ウィンカーを点滅させながら、自車の予定ルートと同じルートで前記交差点を通行した車両が少なかった)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT37)。
【0175】
また、ステップT36において、カウンタCS が0未満でない(すなわち、カウンタCS が0であり、過去の実績に基づいて、交差点案内の要/不要を判断することが難しい)と判断すれば、次に、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップT38)。
【0176】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT39)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップT40)。
【0177】
ところで、ステップT23において、同一車線上を先行する先行車が存在しないと判断すれば、交差点案内の要/不要の判断を行うことができないので、撮像装置22のカメラ電源をOFFにし(ステップT41)、フラグfを0にして(ステップT42)、処理動作T▲2▼を終了する。
【0178】
上記実施の形態(10)に係るナビゲーション装置によれば、過去の実績を累積したものを用いて、交差点案内の要/不要の判断を行うので、より一層適したかたちで、交差点案内を行ったり、行わなかったりすることができる。
【0179】
また、上記実施の形態(9)又は(10)に係るナビゲーション装置では、交差点の通行ルートに対応した、前記交差点を通行するにあたってのウィンカーの点灯情報を、撮像装置22から得られる画像データに基づいて取得するようにしているが、別の実施の形態に係るナビゲーション装置では、前記情報を無線回線などを通じて、外部(例えば、周囲を走行している他車や、前記情報を提供するサービスを行う情報提供機関など)から取得するようにしても良い。
【0180】
なお、前記情報を無線回線などを通じて、外部より取得するには、例えば、自車が交差点に接近すると、交差点におけるウィンカーの点灯情報の取得要求を示した信号を外部へ送信する手段と、外部から送信されてきた信号を受信する手段とを装備するようにすれば良い。但し、要求先に前記情報が記憶された記憶手段はもちろんのこと、前記取得要求を示した信号を受信する手段、及び前記記憶手段に記憶されている情報を含んだ信号を要求元へ送信する手段を装備しておく必要がある。
【0181】
また、さらに別の実施の形態に係るナビゲーション装置では、前記情報ではなく、交差点の通行ルートに対応した、交差点案内の要/不要に関する情報そのものを、無線回線などを通じて、外部から取得するようにしても良い。
【0182】
図24は実施の形態(11)に係るナビゲーション装置の要部を概略的に示したブロック図である。但し、ここでは図30に示したナビゲーション装置と同様の構成部分については同符号を付し、その説明を省略する。
【0183】
図24に示したナビゲーション装置においては、車速から演算して走行距離を取得するための車速センサ2と、進行方向を取得するためのジャイロセンサ3とがマイコン31に接続されており、マイコン31は、演算した走行距離、及び進行方向に基づいて自車位置を割り出すようになっている(自律航法)。また、GPS受信機4がマイコン31に接続されており、マイコン31は、GPS信号に基づいて自車位置を割り出すようになっている(GPS航法)。
【0184】
また、マイコン31には、DVDドライブ6が接続されており、マイコン21は、割り出した自車位置と道路データとを合わせる(いわゆる、マップマッチング処理を行う)ことによって、自車位置が正確に示された地図を表示パネル9bへ表示するようになっている。
【0185】
また、DVD−ROM(CD−ROMなどの記憶装置も可能)37には、従来のDVD−ROM7(図31)と同様に道路データ等が記憶されている。但し、DVD−ROM37には、DVD−ROM7と違って、リンクレコードとして、道路における制限速度情報、及び勾配情報が追加されている。
【0186】
次に、実施の形態(11)に係るナビゲーション装置におけるマイコン31の行う処理動作T▲3▼を図25に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップT51)、交差点に接近していないと判断すれば、処理動作T▲3▼を終了する。一方、交差点に接近していると判断すれば、前記交差点への自車の進入道路における制限速度va に関する情報を読み出し(ステップT52)、次に、制限速度va が所定の速度v1 (例えば、60km/h)以上であるか否かを判断する(ステップT53)。
【0187】
進入道路の制限速度va が所定の速度v1 以上である(すなわち、自車が幹線道路や高速道路の本線車道を走行している)と判断すれば、前記交差点からの自車の脱出道路における制限速度vb に関する情報を読み出し(ステップT54)、次に、制限速度vb が制限速度va と同一であるか否かを判断する(ステップT55)。
【0188】
制限速度vb が制限速度va と同一である(すなわち、自車は前記交差点を通行した後も、幹線道路や高速道路の本線車道を走行し続ける)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT56)。
【0189】
一方、制限速度vb が制限速度va と同一ではない(すなわち、自車は前記交差点を通過した後、脇道へ進んだり、本線車道から出る)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップT57)。
【0190】
また、ステップT53において、制限速度va が所定の速度v1 以上ではないと判断すれば、次に、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップT58)。
【0191】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT59)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップT60)。
【0192】
上記実施の形態(11)に係るナビゲーション装置によれば、自車における交差点への予定進入道路の制限速度が所定の速度(例えば、60km/h)以上であり、さらに、前記交差点からの脱出道路の制限速度が同じく前記所定の速度以上であると判断すれば、自車は前記交差点へ進入する前も、脱出してからも幹線道路や高速道路の本線車道などを走行する(すなわち、その通行が、ドライバーにとって、道なり走行の感覚と似ている)とし、交差点案内を行わないようにすることができる。これにより、ドライバーの運転感覚に合うように、交差点案内を行ったり、行わなかったりすることができる。
【0193】
次に、実施の形態(12)に係るナビゲーション装置について説明する。但し、実施の形態(12)に係るナビゲーション装置の構成については、マイコン31を除いて、図24に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0194】
実施の形態(12)に係るナビゲーション装置におけるマイコン31Aの行う処理動作T▲4▼を、図26に示したフローチャートに基づいて説明する。まず、自車が走行している道路の傾斜角が所定度以上であるか否かを、DVD−ROM37に記憶されている勾配情報に基づいて判断し(ステップT61)、前記傾斜角が前記所定度以上であると判断すれば、該所定度以上の道路が続く最終地点(ノード)を求める(ステップT62)。
【0195】
次に、前記最終地点付近に自車が通行する予定となっている交差点が存在するか否かを判断し(ステップT63)、前記交差点が存在すると判断すれば、該交差点の通行に対する交差点案内を行うことを決定する(ステップT64)。一方、前記交差点が存在しないと判断すれば、そのまま処理動作T▲4▼を終了する。
【0196】
また、ステップT61において、自車が走行している道路の傾斜角が前記所定度以上でないと判断すれば、ステップT62〜T64の処理動作を行う必要がないので、そのまま処理動作T▲4▼を終了する。
【0197】
上記実施の形態(12)に係るナビゲーション装置によれば、急な勾配の坂道を上り切ったすぐ先のところに、交差点が存在する場合には、前記交差点に対する交差点案内を行うようにすることができる。
【0198】
次に、実施の形態(13)に係るナビゲーション装置について説明する。但し、実施の形態(13)に係るナビゲーション装置の構成については、マイコン31、及びDVD−ROM37を除いて、図24に示したナビゲーション装置の構成と同様であるため、マイコンには異なる符号を付し、その他の説明をここでは省略する。
【0199】
また、DVD−ROM(CD−ROMなどの記憶装置も可能)37Bには、従来のDVD−ROM7(図30)とは異なり、従来のような道路データは記憶されておらず、その代わりに地図を表す画像データ(例えば、衛星写真データやイメージ地図等のラスタ地図)が記憶されている。なお、前記画像データには位置情報(例えば、地図の左下隅の座標(緯度・経度)情報)が含まれているので、この位置情報を用いることによって、前記画像データから得られる画像上に自車位置を表示したり、誘導ルートを表示したりすることができるようになっている。また、このような画像データを外部から取得し、マイコンと接続される記憶手段(例えば、ハードディスクなど)に記憶させても良い。
【0200】
次に、実施の形態(13)に係るナビゲーション装置におけるマイコン31Bの行う処理動作T▲5▼を、図27に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップT71)、交差点に接近していないと判断すれば、処理動作T▲5▼を終了する。一方、交差点に接近していると判断すれば、自車の周辺を示す前記画像データのベクトル化を行う(ステップT72)。
【0201】
次に、前記交差点への進入道路の幅員、及び前記交差点からの脱出道路の幅員を求めて(ステップT73、T74)、これら幅員が略一致するか否かを判断し(ステップT75)、これら幅員が略一致すると判断すれば、次に、これら幅員が所定幅以上であるか否かを判断する(ステップT76)。
【0202】
これら幅員が略一致し、かつ前記所定幅以上である(すなわち、自車は幹線道路や高速道路の本線車道を走行しており、かつ前記交差点を通行した後も、幹線道路や高速道路の本線車道を走行し続ける)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT77)。
【0203】
一方、ステップT75において、これら幅員の幅が一致しないと判断した場合や、ステップT76において、これら幅員の幅が前記所定幅以上でないと判断した場合には、ステップT78へ進んで、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する。
【0204】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT79)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップT80)。
【0205】
上記実施の形態(13)に係るナビゲーション装置によれば、前記画像データから交差点への進入道路の幅員、及び前記交差点からの脱出道路の幅員を求め、これら幅員情報を利用することによって、交差点案内の要/不要を判断するので、従来からの道路データではなく、前記画像データを用いたとしても、交差点案内の要/不要の判断を適切に行うことができる。
【0206】
図28は実施の形態(14)に係るナビゲーション装置の要部を概略的に示したブロック図である。但し、ここでは図30に示したナビゲーション装置と同様の構成部分については同符号を付し、その説明を省略する。
【0207】
図28に示したナビゲーション装置においては、車速から演算して走行距離を取得するための車速センサ2と、進行方向を取得するためのジャイロセンサ3とがマイコン41に接続されており、マイコン41は、演算した走行距離、及び進行方向に基づいて自車位置を割り出すようになっている(自律航法)。また、GPS受信機4がマイコン41に接続されており、マイコン41は、GPS信号に基づいて自車位置を割り出すようになっている(GPS航法)。
【0208】
また、マイコン41には、DVDドライブ6が接続されており、マイコン41は、割り出した自車位置と道路データとを合わせる(いわゆる、マップマッチング処理を行う)ことによって、自車位置が正確に示された地図を表示パネル9bへ表示するようになっている。
【0209】
また、マイコン41には自車の前方を走行する先行車の、自車との相対速度を検出するためのミリ波レーダー42が接続されており、ミリ波レーダー42によって検出された先行車の相対速度に関する情報が与えられるようになっている。また、マイコン41は先行車を追跡するようにミリ波レーダー42の駆動を制御することができるようになっている。
【0210】
次に、実施の形態(14)に係るナビゲーション装置におけるマイコン41の行う処理動作T▲6▼を、図29に示したフローチャートに基づいて説明する。まず、自車がルート案内に従っての走行中に交差点に接近しているか否かを判断し(ステップT81)、交差点に接近していないと判断すれば、処理動作T▲6▼を終了する。一方、交差点に接近していると判断すれば、ミリ波レーダー42の電源をONにし(ステップT82)、次に、ミリ波レーダー42によって検出されるデータに基づいて、同一車線上を先行する先行車が存在するか否かを判断する(ステップT78)。
【0211】
先行車が存在すると判断すれば、車速センサ2によって検出される自車の速度vA に関する情報を取得し(ステップT84)、次に、自車の速度vA が所定の速度v1 (例えば、60km/h)以上であるか否かを判断する(ステップT85)。
【0212】
自車の速度vA が所定の速度v1 以上である(すなわち、自車が幹線道路や高速道路の本線車道を走行している)と判断すれば、次に、前記先行車が自車の予定ルートと同じルートで前記交差点を通行したか否かを判断し(ステップT86)、前記先行車が同じルートで前記交差点を通行したと判断すれば、ミリ波レーダー42によって検出されるデータに基づいて、前記交差点からの脱出道路を走行している前記先行車の速度vB を求める(ステップT87)。
【0213】
次に、ミリ波レーダー42の電源をOFFにして(ステップT88)、前記先行車の速度vB が所定の速度v1 以上であるか否かを判断し(ステップT89)、速度vB が所定の速度v1 以上である(すなわち、自車は前記交差点を通行した後も、幹線道路や高速道路の本線車道を走行し続ける)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT90)。
【0214】
一方、速度vB が所定の速度v1 以上ではない(すなわち、自車は前記交差点を通過した後、脇道へ進んだり、本線車道から出る)と判断すれば、その通行が、ドライバーにとって、道なり走行の感覚とは違うとし、交差点案内を行うことを決定する(ステップT91)。
【0215】
また、ステップT83において、同一車線上を先行する先行車が存在しないと判断したり、ステップT85において、自車の速度vA が所定の速度v1 以上ではないと判断したり、ステップT86において、前記先行車が自車の予定ルートとは異なるルートで前記交差点を通行したと判断すれば、交差点案内の要/不要の判断を行うことができないので、ミリ波レーダー42の電源をOFFにして(ステップT92)、次に、前記交差点への進入方向を基準にした前記交差点からの脱出角度が、所定の角度(例えば、30°)以内であるか否かを判断する(ステップT93)。
【0216】
前記脱出角度が前記所定の角度以内であると判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚と似ているとし、交差点案内を行わないことを決定する(ステップT94)。一方、前記脱出角度が、前記所定の角度以内ではないと判断すれば、前記交差点における通行が、自車のドライバーにとって、道なり走行の感覚とは違うと判断し、交差点案内を行うことを決定する(ステップT95)。
【0217】
上記実施の形態(14)に係るナビゲーション装置によれば、自車における交差点への進入前の速度が所定の速度(例えば、60km/h)以上であり、さらに、前記交差点からの脱出道路で走行している先行車の速度が同じく所定の速度以上であると判断すれば、自車は前記交差点へ進入する前も、脱出してからも幅員の広い幹線道路や高速道路の本線車道などを走行する(すなわち、前記交差点の通行が、ドライバーにとって、道なり走行の感覚と似ている)とし、交差点案内を行わないようにすることができる。これにより、ドライバーの運転感覚に合うように、交差点案内を行ったり、行わなかったりすることができる。
【0218】
なお、上記実施の形態(1)〜(14)に係るナビゲーション装置では、各情報それぞれに基づいて、交差点案内の要/不要を判断しているが、別の実施の形態に係るナビゲーション装置では、これら各情報を組み合わせて、交差点案内の要/不要を判断するようにしても良い。
【0219】
また、上記実施の形態(1)〜(14)に係るナビゲーション装置では、例えば、道路標示情報に基づいて、交差点への進入道路の表面に記されている中央線と、前記交差点からの脱出道路の表面に記されている中央線とが繋がっているか否かを判断し、これら中央線が繋がっていると判断すれば、前記交差点における通行が、ドライバーにとって、道なり走行の感覚に似ていると判断し、交差点案内を行わないようになっている。
【0220】
ところが、これら中央線が繋がっていたとしても、前記交差点における通行が、道なり走行の感覚と似ているとは言えない場合がある。それは、例えば、夜間走行や雨天候走行などの場合である。
【0221】
よって、別の実施の形態に係るナビゲーション装置では、時間帯情報、及び/又は気象情報に基づいて、例えば、夜間走行であるか否かを判断したり、雨天候であるか否かを判断することによって、交差点案内の要/不要を判断するようにしても良い。
【0222】
なお、時間帯情報の取得方法としては、例えば、時計などから時刻情報を取得したり、又はヘッドランプなどのON/OFF状態を示した信号を取り込むといった方法が挙げられる。また、気象情報の取得方法としては、例えば、無線回線を通じて外部から取得したり、又は雨滴センサからの信号や、ワイパーなどのON/OFF状態を示した信号を取り込むといった方法が挙げられる。
【図面の簡単な説明】
【図1】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図2】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図3】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図4】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図5】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図6】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図7】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図8】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図9】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図10】本発明に係るナビゲーション装置を説明するために用いる、交差点付近を示した一例である。
【図11】本実施の形態(1)に係るナビゲーション装置の要部を概略的に示したブロック図である。
【図12】実施の形態(1)に係るナビゲーション装置に装填される、DVD−ROMに記憶されている道路ネットワークデータのデータ構造の一例である。
【図13】実施の形態(1)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図14】実施の形態(2)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図15】実施の形態(3)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図16】実施の形態(4)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図17】実施の形態(5)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図18】実施の形態(6)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図19】実施の形態(7)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図20】実施の形態(8)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図21】実施の形態(9)に係るナビゲーション装置の要部を概略的に示したブロック図である。
【図22】実施の形態(9)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図23】実施の形態(10)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図24】実施の形態(11)に係るナビゲーション装置の要部を概略的に示したブロック図である。
【図25】実施の形態(11)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図26】実施の形態(12)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図27】実施の形態(13)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図28】実施の形態(14)に係るナビゲーション装置の要部を概略的に示したブロック図である。
【図29】実施の形態(14)に係るナビゲーション装置におけるマイコンの行う処理動作を示したフローチャートである。
【図30】従来のナビゲーション装置の要部を概略的に示したブロック図である。
【図31】従来のDVD−ROMに記憶されている道路ネットワークデータのデータ構造の一例である。
【図32】従来のナビゲーション装置による交差点拡大図の表示の一例である。
【図33】(a)は、従来のナビゲーション装置の問題点を説明するために用いる、交差点付近を示した一例であり、(b)は、交差点からの脱出角度を示した図である。
【図34】(a)(b)は、従来のナビゲーション装置による交差点拡大図の表示の一例である。
【符号の説明】
11 マイコン
17 DVD−ROM
B1 橋
BL1、BL2 境界線
CA 1、LA 1、RA 1 進行方向
CCL1、CCL2、LCL1、LCL2、RCL1、RCL2 車線
CL1〜CL3 中央線
G1〜G3 ガードレール
M 自車
Q1〜Q10 交差点
R1〜R28 道路
SL1 停止線
SP1〜SP3 標示板
WR1〜WR3 歩道
Claims (7)
- 目的地までの誘導ルート上の交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置において、
進行方向別通行区分情報を示した道路標示情報に基づいて、交差点案内の要/不要を判断する要不要判断手段を備え、
前記交差点案内手段が、前記要不要判断手段からの判断結果に基づいて、交差点案内を行うものであり、
前記要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路に車線が2つ以上存在し、
自車の走行している車線の表面に記されている進行方向が一方向だけであり、
なおかつ前記進行方向と前記誘導ルートに応じた前記交差点からの脱出方向とが一致するか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴とするナビゲーション装置。 - 目的地までの誘導ルート上の交差点における通行方法等の案内を行う交差点案内手段を備えたナビゲーション装置において、
進行方向別通行区分情報を示した道路標識情報に基づいて、交差点案内の要/不要を判断する要不要判断手段を備え、
前記交差点案内手段が、前記要不要判断手段からの判断結果に基づいて、交差点案内を行うものであり、
前記要不要判断手段が、案内の要/不要の判断対象となる交差点への進入道路に車線が2つ以上存在し、
自車の走行している車線に指定されている進行方向が一方向だけであり、
なおかつ前記進行方向と前記誘導ルートに応じた前記交差点からの脱出方向とが一致するか否かに基づいて、前記交差点案内の要/不要を判断するものであることを特徴とするナビゲーション装置。 - 前記道路標示情報、及び前記道路標識情報のうちのいずれかを、無線回線を通じて取得する情報取得手段を備え、
前記要不要判断手段が、前記情報取得手段により取得された情報に基づいて、交差点案内の要/不要を判断するものであることを特徴とする請求項1又は請求項2記載のナビゲーション装置。 - 交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、
交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する要不要判断手段と、
自車の前方を撮像する撮像手段によって得られた画像データに基づいて、交差点を通行するにあたっての先行車の方向指示灯の点灯状況と、前記先行車の前記交差点の通行経路とを求める算出手段とを備え、
前記交差点案内手段が、前記要不要判断手段からの判断結果に基づいて、交差点案内を行うものであり、
前記要不要判断手段が、前記算出手段による算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴とするナビゲーション装置。 - 前記要不要判断手段が、累積した前記算出結果と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴とする請求項4記載のナビゲーション装置。
- 交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、
交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断する要不要判断手段と、
交差点の通行経路に対応した、前記交差点を通行するにあたっての方向指示灯の点灯情報を、無線回線を通じて取得する情報取得手段とを備え、
前記交差点案内手段が、前記要不要判断手段からの判断結果に基づいて、交差点案内を行うものであり、
前記要不要判断手段が、前記情報取得手段により取得された前記情報と、自車の前記交差点の予定通行経路に関する情報とに基づいて、交差点案内の要/不要を判断するものであることを特徴とするナビゲーション装置。 - 交差点における通行方向等の案内を行う交差点案内手段を備えたナビゲーション装置において、
自車の交差点からの予定脱出道路に関する情報と、自車の速度情報と、前記予定脱出道路を走行する先行車の速度情報、又は自車との相対速度情報とに基づいて、交差点案内の要/不要を判断する要不要判断手段を備え、
前記交差点案内手段が、前記要不要判断手段からの判断結果に基づいて、交差点案内を行うものであることを特徴とするナビゲーション装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002050267A JP4076357B2 (ja) | 2001-03-16 | 2002-02-26 | ナビゲーション装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001075464 | 2001-03-16 | ||
| JP2001-75464 | 2001-03-16 | ||
| JP2002050267A JP4076357B2 (ja) | 2001-03-16 | 2002-02-26 | ナビゲーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002340603A JP2002340603A (ja) | 2002-11-27 |
| JP4076357B2 true JP4076357B2 (ja) | 2008-04-16 |
Family
ID=26611415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002050267A Expired - Fee Related JP4076357B2 (ja) | 2001-03-16 | 2002-02-26 | ナビゲーション装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4076357B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108349491A (zh) * | 2015-11-12 | 2018-07-31 | 马自达汽车株式会社 | 车道维持控制装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9341485B1 (en) * | 2003-06-19 | 2016-05-17 | Here Global B.V. | Method and apparatus for representing road intersections |
| ATE540289T1 (de) * | 2003-07-16 | 2012-01-15 | Navteq North America Llc | Fahrerassistenzsystem eines kraftfahrzeugs |
| JP4535745B2 (ja) * | 2004-02-23 | 2010-09-01 | 株式会社エムビーエイ | 地図情報作成装置 |
| JP5075331B2 (ja) * | 2005-09-30 | 2012-11-21 | アイシン・エィ・ダブリュ株式会社 | 地図データベース生成システム |
| JP4775107B2 (ja) * | 2006-05-17 | 2011-09-21 | トヨタ自動車株式会社 | 車両用経路案内装置 |
| JP4788505B2 (ja) * | 2006-07-13 | 2011-10-05 | 株式会社デンソー | ナビゲーション装置 |
| JPWO2008041284A1 (ja) * | 2006-09-29 | 2010-01-28 | パイオニア株式会社 | 誘導装置、誘導方法、誘導プログラム、および記録媒体 |
| JP4884340B2 (ja) * | 2007-09-11 | 2012-02-29 | アルパイン株式会社 | ナビゲーション装置 |
| JP5918479B2 (ja) * | 2011-05-27 | 2016-05-18 | 株式会社ゼンリン | 経路案内装置 |
| JP6314961B2 (ja) | 2015-11-12 | 2018-04-25 | マツダ株式会社 | 車線維持制御装置 |
| JP6948279B2 (ja) * | 2018-03-23 | 2021-10-13 | 株式会社トヨタマップマスター | 地図情報作成装置、地図情報作成方法、プログラム及び記録媒体 |
| CN112309233B (zh) * | 2020-10-26 | 2022-09-30 | 北京三快在线科技有限公司 | 一种道路边界的确定、道路切分方法及装置 |
| JP7633130B2 (ja) | 2021-09-17 | 2025-02-19 | 株式会社トヨタマップマスター | 情報処理装置、案内要否判定方法、案内要否判定プログラム及び記憶媒体 |
-
2002
- 2002-02-26 JP JP2002050267A patent/JP4076357B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108349491A (zh) * | 2015-11-12 | 2018-07-31 | 马自达汽车株式会社 | 车道维持控制装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002340603A (ja) | 2002-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101410695B (zh) | 导航装置 | |
| JP4076357B2 (ja) | ナビゲーション装置 | |
| JP7347522B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP6252235B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP5482167B2 (ja) | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム | |
| CN101427101B (zh) | 导航装置及其方法 | |
| JP5223768B2 (ja) | 車両用表示装置 | |
| JPWO2018211591A1 (ja) | 表示制御装置および表示制御方法 | |
| US20050171688A1 (en) | Car navigation device | |
| US12365342B2 (en) | Drive assistance device and computer program | |
| JP4320032B2 (ja) | 経路案内システム及び方法 | |
| JP7439529B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2009113710A (ja) | ヘッドアップディスプレイ装置 | |
| WO2022259733A1 (ja) | 運転支援装置 | |
| JP7443992B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| WO2023127689A1 (ja) | 運転支援装置及びコンピュータプログラム | |
| WO2023140041A1 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2008059082A (ja) | 交差点情報提供システム及び運転支援システム | |
| JP2023097308A (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2021157614A (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2023050431A (ja) | 運転支援装置及びコンピュータプログラム | |
| JP4196461B2 (ja) | 経路案内装置 | |
| TW201839357A (zh) | 行駛支援裝置及地圖資料之資料結構 | |
| JP2008241720A (ja) | 経路案内方法及び経路案内装置 | |
| JP7800246B2 (ja) | 運転支援装置及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070731 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080129 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110208 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110208 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120208 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120208 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130208 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140208 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150208 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |