JP4097797B2 - クランプ回避装置 - Google Patents
クランプ回避装置 Download PDFInfo
- Publication number
- JP4097797B2 JP4097797B2 JP23671898A JP23671898A JP4097797B2 JP 4097797 B2 JP4097797 B2 JP 4097797B2 JP 23671898 A JP23671898 A JP 23671898A JP 23671898 A JP23671898 A JP 23671898A JP 4097797 B2 JP4097797 B2 JP 4097797B2
- Authority
- JP
- Japan
- Prior art keywords
- avoidance
- clamp
- base
- attached
- air cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 10
- 239000002585 base Substances 0.000 claims 12
- 239000012458 free base Substances 0.000 claims 1
- 238000004080 punching Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 2
- 238000009429 electrical wiring Methods 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
Images






Landscapes
- Punching Or Piercing (AREA)
- Auxiliary Devices For Machine Tools (AREA)
Description
【発明の属する技術分野】
本発明はクランプ回避装置、特にタレットパンチプレスにおけるクランプ回避装置に関する。
【0002】
【従来の技術】
従来より、タレットパンチプレスにおいては、キャリッジべース11(図7)とキャリッジ12を介してクランプ装置66が取り付けられ、該クランプ装置66によりワークWを把持し所定の位置に位置決めするようになっている。
【0003】
そして、このタレットパンチプレスにおいては、パンチ加工できない部分であるデッドゾーンをできる限り少なくするために、前記クランプ装置66が上部タレット6と下部タレット7の間を通過できるようになっている(図7の上図)。
【0004】
ところが、クランプ装置66がダイD上に位置決めされた場合に、この状態でパンチPを下降させると、クランプ装置66が打抜かれて破損してしまう。
【0005】
このため、クランプ装置66がオーバライド領域K(図5)に入ると、ワークWを解放すると共に、該クランプ装置66が上記タレット6、7を回避できるようにしたクランプ回避装置が従来より使用されている。
【0006】
従来のクランプ回避装置は、例えば本体60に内蔵されたエアシリンダ等の回避駆動手段61を、ピストンロッド65を介してベース63の後端に結合し、該ベース63をガイド62を介して本体60に移動自在に取り付けた構成を有している。
【0007】
この構成により、クランプ装置66がオーバライド領域K(図5)に入ると、クランパ64を開いて(図7の下図)ワークWを解放すると共に、回避駆動手段61を作動させる。
【0008】
これにより、ピストンロッド65を介して回避駆動手段61に結合しているベース63と、該ベース63に旋回自在に取り付けられたクランパ64は、一体になってキャリッジべース11側に後退するので(図7の下図)、クランプ装置66はタレット6、7を回避することができ、該クランプ装置66の損傷は阻止される。
【0009】
【発明が解決しようとする課題】
【0010】
図7に示す従来のクランプ回避装置は、既述したように、クランプ装置66側に取り付けられた回避駆動手段61を有している。
【0011】
従って、クランプ装置66の自重が大きくなり、位置決め動作が遅くなる。
【0012】
また、上記回避駆動手段61に必要なエア配管や、電気の配線を、クランプ装置66それぞれに取り付けなければならない。
【0013】
そのため、クランプ回避装置の構造が複雑になり、故障発生率も高くなる。更に、それに伴って、クランプ装置66を取り付ける場合の個数にも制限があり、容易に増やせない。
【0014】
本発明の目的は、クランプ装置の軽量化を図ると共に、装置構造を簡単にして故障発生率を低くし、かつクランプ装置の取付個数の自由度を向上させるクランプ回避装置を提供する。
【0015】
【課題を解決するための手段】
上記課題を解決するため、本発明によれば、図1〜図6に示すように、(A)キャリッジべース11とキャリッジ12を介して取り付けられたクランプ装置13によりワークWを把持し、該ワークWに対してタレットに装着されたパンチとダイによりパンチ加工を施すタレットパンチプレスにおいて、
(B)上記クランプ装置13は、前進・後退自在であって後部にガイドローラ37が取り付けられたベース34と、該ベース34に旋回自在に取り付けられてそれと協働してワーク W を把持するクランパ33を有し、
(C)上記キャリッジべース11上であってオーバライド領域Kに対向する位置に、前進・後退自在であって溝41Aが形成された回避部材41を駆動する回避駆動手段42を設け、該回避部材41は、クランプ装置13がオーバライド領域Kに入った場合には、上記クランプ装置13のクランパ33を開いてワーク W が解放された状態でフリー状態のベース34のガイドローラ37を溝41Aに嵌合させて該ベース34を引き込むことにより、クランプ装置13をオーバライド領域Kから退避させることを特徴とするクランプ回避装置が提供される。
【0016】
従って、本発明の構成によれば、回避駆動手段42をキャリッジべース11に設けたことにより、クランプ装置13の軽量化が図られ、各クランプ装置13にエア配管や電気の配線を取り付ける必要がなくなったので、クランプ回避装置の装置構造が簡単になり、また故障発生率も低くなり、更に、クランプ装置13の取付個数の自由度が向上する。
【0017】
【発明の実施の形態】
以下、本発明を、実施の形態により添付図面を参照して、説明する。
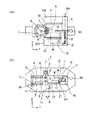
図1は本発明の実施形態を示す全体図である。
【0018】
図1に示すクランプ装置13は、例えばタレットパンチプレス(図4)に適用した場合であり、キャリッジべース11とキャリッジ12を介してクランプ装置13が取り付けられている。
【0019】
上記クランプ装置13の本体31の下部には、ガイド35が設けられ、該ガイド35には、ベース34が滑り結合しY軸方向に移動自在となっている。
【0020】
即ち、通常時には(図6(A))、ガイド35の後端には、ベース34の後部ストッパ34Bが係合しているが、回避時に(図6(C))後述する回避部材41によりベース34が引き込まれると、該ベース34はガイド35上をY軸方向に移動し、後部ストッパ34Bはガイド35の後端を離れ、前部ストッパ34Dがガイド35の前端と係合する。
【0021】
また、ベース34(図1)の前部には穴34Cが形成され、後述するロックピン54が挿入されるようになっており、該ベース34の後部にはガイドローラ37が取り付けられ、後述する回避部材41の溝41Aに嵌合可能となっている。
【0022】
上記ベース34にはそれと協働してワークWを把持するクランパ33が、水平軸34Aを介して旋回自在に取り付けられ、クランパ33は、本体31の前方開口部31Aを通過して該本体31内に進入し、その後部にはフック33Aが設けられている。
【0023】
本体31には、クランプ駆動手段38が(図1)が内蔵され、該クランプ駆動手段38は例えばスプリング38A(図2)付きのエアシリンダにより構成され、該エアシリンダのピストンロッド39の先端には円柱ピン39Aが取り付けられ、該円柱ピン39Aには、前記クランパ33のフック33Aが着脱可能である。
【0024】
即ち、通常時には、クランパ33のフック33Aが円柱ピン39Aに装着して(図6(A))、エアシリンダ38を上昇させることよりクランパ33を閉じ、ベース34と協働してワークWを把持するようになっでいる。
【0025】
しかし、クランプ装置13がオーバライド領域Kに入った場合には(図6(B))、後述するロックピン54をベース34から抜いて該ベース34をフリー状態にすると共に、エアシリンダ38を降下させてクランパ33を水平状態にする。
【0026】
これにより、ワークWは解放され、回避駆動手段42が作動して回避部材41がベース34を引き込むと(図6(C))、クランパ33のフック33Aが円柱ピン39Aから外れて本体31の後方開口部31Bを通過してキャリッジ12の下方まで移動する。
【0027】
従って、ベース34とクランパ33は一体となって後退し、タレット6、7から遠ざかるので、クランプ装置13は、オーバライド領域Kから退避するようになる。
【0028】
本体31(図1)の前面には、ブラケット51を介してロック駆動手段50が取り付けられ、該ロック駆動手段50は例えばエアシリンダにより構成されている。
【0029】
エアシリンダ50のピストンロッド52には、ストレッチ53を介してロックピン54が取り付けられ、該ロックピン54は、前記ベース34の穴34Cに挿入されている。
【0030】
そして、回避時には、既述したように、ロック駆動手段50を作動してロックピン54を上昇させて穴34Cから抜き(図6(B))、ベース34をフリー状態にする。
【0031】
一方、後述するタレットパンチプレス(図4)のキャリッジべース11上であってオーバライド領域K(図5)に対向する位置には、回避駆動手段42が設けられている(図1、図2)。
【0032】
この回避駆動手段42は、例えばキャリッジべース11の下部に設けられ(図1、図2)、エアシリンダ又はラック・ピニオン機構により構成されている。
【0033】
上記回避駆動手段42がエアシリンダにより構成される場合、エアシリンダ42のピストンロッド43は、回避部材41に結合されている。
【0034】
この回避部材41は溝41Aを有し、該溝41Aには前記ベース34のガイドローラ37が嵌合可能となっており、該回避部材41の長さは、オーバライド領域KのX軸方向の長さXO に等しく(図5)、かつ該回避部材41がキャリッジべース11に固定されたガイドレール47に滑り結合し、Y軸方向に移動自在である。
【0035】
この構成により、クランプ装置13の少なくともX軸位置が、オーバライド領域Kに入った場合には、ベース34のガイドローラ37が回避部材41の溝41Aに嵌合するようになっている(図5)。
【0036】
そして、クランプ装置13のX軸位置とY軸位置の双方共オーバライド領域Kに入った場合には(図6(B))、そのクランプ装置13のエアシリンダ38を作動させクランパ33を開いてワークWを解放した後、ベース34のガイドローラ37が嵌合している回避部材41が回避駆動手段42により作動して、該ベース34を引き込むことにより(図6(C))、クランプ装置13をオーバライド領域Kから退避させる。
【0037】
しかし、クランプ装置13のX軸位置だけが、オーバライド領域Kに入った場合には、ベース34のガイドローラ37は回避部材41と嵌合するが、該回避部材41を単に通過するだけである。
【0038】
また、前記回避部材41が走行するガイドレール47の先端には、取付板44を介してX軸方向オーバライド領域検出用センサ45、46が取り付けられている。
【0039】
このX軸方向オーバライド領域検出用センサ45の位置は(図5)、オーバライド領域KのX軸方向の両端の位置に相当し、その外側に、もう一方のX軸方向オーバライド領域検出用センサ46が取り付けられている。
【0040】
更に、タレットパンチプレス(図4)の下部フレーム17には、Y軸方向オーバライド領域検出用リミットスイッチLyが設けられ、該Y軸方向オーバライド領域検出用リミットスイッチLyに対応するドグ24が後述するサポートブラケット16に取り付けられている(図4(B)、図5)。
【0041】
この構成により、X軸方向オーバライド領域検出用センサ45、46が両方共感知すると共に、Y軸方向オーバライド領域検出用リミットスイッチLyが導通すると、クランプ装置13はオーバライド領域Kに入ったものと判断され、回避部材41によりベース34が引き込まれ(図6(B))、クランプ装置13がオーバライド領域Kから退避するようになっている。
【0042】
図3は、本発明の他の実施形態を示す図である。
【0043】
図1、図2とは、回避駆動手段42がキャリッジべース11の上部に取り付けられている点が異なる。
【0044】
図3の回避駆動手段42は、エアシリンダ又はラック・ピニオン機構により構成されている。
【0045】
そして、回避駆動手段42がエアシリンダにより構成されている場合には、エアシリンダ42のピストンロッド43が、レバー49と連結棒48を介して回避部材41に結合されている。
【0046】
即ち、レバー49は、支軸49Aに回転自在に取り付けられ、該レバー49の一端が前記ピストンロッド43にヒンジ結合し、該レバー49の他端が回避部材41に固定された連結棒48にヒンジ結合している。
【0047】
この構成により、上方に設置されたエアシリンダ42の前進・後退運動が、レバー49を介して、下方に設置された回避部材41に伝達され、該回避部材41が前進・後退するようになっでいる。
【0048】
図4は、本発明をタレットパンチプレスに適用した場合の図であり、上部タレット6と下部タレット7には、パンチPとダイDが同心円状に配置されている。
【0049】
上部タレット6の回転軸8と下部タレット7の回転軸9には、チェーン4と5が巻回され、該チェーン4と5は、駆動軸3に巻回されている。
【0050】
また、パンチセンタCにおけるパンチPの直上方であって、上部フレーム1には、パンチPを殴打するストライカ2が設けられている。
【0051】
この構成により、モータMで駆動軸3を回転させチェーン4と5を循環させれば、上部タレット6と下部タレット7が同期回転し、所定のパンチPとダイDから成る金型をパンチセンタCにおいて選択することができる。
【0052】
下部フレーム21には、前記Y軸方向オーバライド領域検出用リミットスイッチLyが設けられ、これに対するドグ24は、サポートブラケット16上であって(図4(B))クランプ装置13の先端に相当する位置に設けられている。
【0053】
また、下部フレーム21上にはY軸ガイドレール17が敷設されている。
【0054】
そして、このガイドレール17には、サポートブラケット16が滑り結合しており、該サポートブラケット16にはキャリッジべース11が固定され、該キャリッジべース11には、上部フレーム1に設けたY軸モータMyのボールねじ14が螺合している。
【0055】
また、キャリッジべース11には、前記クランプ装置13が取り付けられているキャリッジ12がX軸ガイドレール(図示省略)を介して滑り結合しており、該キャリッジ12には、X軸モータMxのボールねじ15が螺合している。
【0056】
更に、タレットパンチプレスの中央には、テーブル10が固定され、該固定テーブル10を跨がってキャリッジべース11が配置され、固定テーブル10の両側のサイドテーブル10A、10Bがキャリッジべース11に取り付けられている。
【0057】
この構成により、X軸モータMxを回転させると、キャリッジ12がキャリッジべース11上をX軸方向に移動すると共に、Y軸モータMyをを回転させるとキャリッジべース11がサイドテーブル10A、10Bと共にY軸方向に移動する。
【0058】
従って、クランプ装置13に把持されたワークWを所定位置に位置決めできると共に、前記X軸方向オーバライド領域検出用センサ45、46、及びY軸方向オーバライド領域検出用リミットスイッチLyとそのドグ24により(図5)、該クランプ装置13のオーバライド領域Kに対する出入りを判断することができる。
【0059】
以下、上記構成を有する本発明の動作を説明する。
【0060】
(1)通常動作(図6(A))。
クランプ装置13がオーバライド領域Kに入っていない場合には、通常の動作を行う。
【0061】
即ち、クランプ駆動手段38であるエアシリンダ38を上昇させることによりクランパ33を閉じ、ベース34と協働してワークWを把持し、キャリッジ12とキャリッジべース11を移動させることにより、該ワークWを所定の位置に位置決めする。
【0062】
また、クランプ装置13のX軸位置だけがオーバライド領域Kに入っているが、Y軸位置が入っていない場合は(図6(A))、たとえキャリッジ12がX軸方向に移動しても(図5)、ベース34のガイドローラ37は、単に回避部材41の溝41Aを通過するだけであり、回避動作は行われない。
【0063】
(2)回避動作(図6(B)〜(C))。
【0064】
しかし、クランプ装置13がオーバライド領域Kに入った場合には(図6(B))、ロック駆動手段50が作動してロックピン54をベース34から抜いて該ベース34をフリー状態にすると共に、クランプ駆動手段38が作動してクランパ33を水平状態にし、ワークWを解放する。
【0065】
次いで、回避駆動手段42が作動して回避部材41がベース34を引き込むと(図6(C))、クランパ33のフック33Aも円柱ピン39Aから外れ、後方開口部31Bを通過してキャリッジ12の下方まで移動し、ベース34とクランパ33は一体となって後退する。
【0066】
これにより、クランプ装置13は、タレット6、7から遠ざかり、オーバライド領域Kから退避し、ワークWのクランプされていた部分が加工可能となる。
【0067】
(3)復帰動作(図6(D)〜(E))。
【0068】
次に、ベース34のガイドローラ37が回避部材41の溝41Aを通過し、X軸方向オーバライド領域検出用センサのうちの内側のセンサ45が感知すると、復帰動作が開始され、更に外側のセンサ46が感知すると再クランプ状態になる。
【0069】
例えば、図5において、オーバライド領域Kに入っていたクランプ装置13が回避動作(図6(C)))を終了してオーバライド領域Kから抜け出し、キャリッジ12と共に右から左へ移動することにより、先ず、取付板44の左端の内側センサ45が該クランプ装置13の通過を感知する。
【0070】
内側センサ45が感知すると、キャリッジべース11に取り付けられた回避駆動手段42が作動して回避部材41を前進させると、該回避部材41にガイドローラ37を介して嵌合しているベース34もクランパ33を伴って前進し、後部ストッパ34Bがガイド35に当接して停止する(図6(D))。
【0071】
同時に、クランパ33のフック33Aがクランプ駆動手段38の円柱ピン39Aに装着すると共に、ロック駆動手段50が作動してロックピン54がベース34の穴34Cに挿入され、該ベース34はロックされる(図6(D))。
【0072】
次いで、クランプ装置13がキャリッジ12と共に更に左へ移動すると、該クランプ装置13の通過を外側センサ46が感知し、再クランプ状態となる。
【0073】
従って、キャリッジ12とキャリッジべース11を移動させることにより、クランプ装置13をオーバライド領域Kの外へ移動させれば、クランプ駆動手段38を作動することにより、該タレットパンチプレスに搬入されたワークWをベース34とクランパ33により把持することができる(図6(E))。
【0074】
【発明の効果】
上記のとおり、本発明によれば、クランプ回避装置を、キャリッジべース上であってオーバライド領域に対向する位置に回避駆動手段を設け、クランプ装置がオーバライド領域に入って回避駆動手段と嵌合した場合に、該回避駆動手段によりクランプ装置を引き込んでオーバライド領域から退避させるように構成した。
【0075】
従って、本発明の構成によれば、回避駆動手段をキャリッジべースに設けたことにより、クランプ装置の軽量化が図られ、各クランプ装置にエア配管や電気の配線を取り付ける必要がなくなったので、クランプ回避装置の装置構造が簡単になり、また故障発生率も低くなり、更に、クランプ装置の取付個数の自由度が向上するという技術的効果を奏することとなった。
【0076】
【図面の簡単な説明】
【図1】本発明の実施形態を示す全体図である。
【図2】図1の側面図である。
【図3】本発明の他の実施形態を示す図である。
【図4】本発明の適用例を示す図である。
【図5】本発明を構成する回避駆動手段42とオーバライド領域Kの関係を示す図である。
【図6】本発明の動作説明図である。
【図7】従来技術の説明図である。
【符号の説明】
5、6 タレット
11 キャリッジべース
12 キャリッジ
13 クランプ装置
31 本体
33 クランパ
33A フック
34 ベース
35 ガイド
37 ガイドローラ
38 クランプ駆動手段
39 クランプ駆動手段38のピストンロッド
39A 円柱ピン
41 回避部材
41A 溝
42 回避駆動手段
43 回避駆動手段42のピストンロッド
44 取付板
45、46 X軸方向オーバライド領域検出用センサ
47 ガイドレール
50 ロック駆動手段
Claims (8)
- キャリッジべースとキャリッジを介して取り付けられたクランプ装置によりワークを把持し、該ワークに対してタレットに装着されたパンチとダイによりパンチ加工を施すタレットパンチプレスにおいて、
上記クランプ装置は、前進・後退自在であって後部にガイドローラが取り付けられたベースと、該ベースに旋回自在に取り付けられてそれと協働してワークを把持するクランパを有し、
上記キャリッジべース上であってオーバライド領域に対向する位置に、前進・後退自在であって溝が形成された回避部材を駆動する回避駆動手段を設け、該回避部材は、クランプ装置がオーバライド領域に入った場合には、上記クランプ装置のクランパを開いてワークが解放された状態でフリー状態のベースのガイドローラを溝に嵌合させて該ベースを引き込むことにより、クランプ装置をオーバライド領域から退避させることを特徴とするクランプ回避装置。 - 上記クランプ装置の本体には、エアシリンダから成るクランプ駆動手段が内蔵されていると共に、該エアシリンダのピストンロッドの先端には円柱ピンが取り付けられ、該円柱ピンにはクランパのフックが着脱自在となっている請求項1記載のクランプ回避装置。
- 上記クランプ装置の本体には、エアシリンダから成るロック駆動手段が外付けされていると共に、該エアシリンダのピストンロッドの先端には、ストレッチを介してロックピンが取り付けられ、該ロックピンがベースに形成された穴に挿入するようになっている請求項1記載のクランプ回避装置。
- 上記クランプ装置がオーバライド領域に入った場合には、ロック駆動手段を作動させてそのピストンロッドを上昇させることによりロックピンをベースの穴から抜いて該ベースをフリー状態にすると共に、クランプ駆動手段を作動させてそのピストンロッドを下降させることによりクランパを開いてワークを解放する請求項1又は2若しくは3記載のクランプ回避装置。
- 上記回避部材がオーバライド領域のX軸方向の長さに等しい長さを有し、該回避部材がキャリッジべースに固定されたガイドレールに滑り結合していてY軸方向に移動自在である請求項1記載のクランプ回避装置。
- 上記回避駆動手段がキャリッジべースの下部に取り付けられていると共に、該回避駆動手段がエアシリンダにより構成され、該エアシリンダのピストンロッドが前記回避部材に結合している請求項1記載のクランプ回避装置。
- 上記回避駆動手段がキャリッジべースの上部に取り付けられていると共に、該回避駆動手段がエアシリンダにより構成され、該エアシリンダのピストンロッドが、支軸に回転自在に取り付けられたレバーの一端にヒンジ結合し、該レバーの他端が回避部材に固定された連結棒にヒンジ結合している請求項1記載のクランプ回避装置。
- 上記クランプ装置のオーバライド領域に対する出入り判断手段は、回避部材が滑り結合しているガイドレールの先端に、取付板を介して取り付けられているX軸方向オーバライド領域検出用センサと、タレットの近傍に設けられたY軸方向オーバライド領域検出用リミットスイッチ及びそれに対応してキャリッジべースのサポートブラケットに設けられたドグにより、構成されている請求項1、又は5記載のクランプ回避装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23671898A JP4097797B2 (ja) | 1998-08-24 | 1998-08-24 | クランプ回避装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23671898A JP4097797B2 (ja) | 1998-08-24 | 1998-08-24 | クランプ回避装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000061564A JP2000061564A (ja) | 2000-02-29 |
| JP4097797B2 true JP4097797B2 (ja) | 2008-06-11 |
Family
ID=17004756
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP23671898A Expired - Fee Related JP4097797B2 (ja) | 1998-08-24 | 1998-08-24 | クランプ回避装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4097797B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116637976A (zh) * | 2023-06-29 | 2023-08-25 | 合肥华峰暖通设备有限公司 | 一种钢管弯曲成型机构 |
-
1998
- 1998-08-24 JP JP23671898A patent/JP4097797B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000061564A (ja) | 2000-02-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5555763A (en) | Work loading and unloading device for bending machine | |
| JPS6331798Y2 (ja) | ||
| EP0371710B1 (en) | Apparatus and method for replacing working-object of processing machine | |
| JP4896370B2 (ja) | エレベータ装置及びそのかご移動規制装置 | |
| JP4097797B2 (ja) | クランプ回避装置 | |
| US5531005A (en) | Device for fixed positioning of a pallet on a work table | |
| JP3927944B2 (ja) | 安全装置を備えた竪型型締装置 | |
| JP2815560B2 (ja) | 落下防止機構を備えた移載機 | |
| US20130241129A1 (en) | Safety clamping device | |
| KR100762859B1 (ko) | 상승식 승강기 도어의 안전 록킹장치 | |
| JP3568272B2 (ja) | ワークの取出し装置 | |
| JP4291457B2 (ja) | エレベータ巻上機のブレーキ解放装置 | |
| JP3696660B2 (ja) | パンチプレス | |
| JP2000094061A (ja) | タレットパンチプレス | |
| JP3933781B2 (ja) | ステップ装置 | |
| JPH0730238Y2 (ja) | プレス型用切替ユニット | |
| JP4311875B2 (ja) | ワーク挿入、保持装置及びワーク挿入、保持方法 | |
| CN220482370U (zh) | 一种嵌件类工件自动上料装置 | |
| JPS63215325A (ja) | 板材の把持移送装置 | |
| JP2000094075A (ja) | クランプ回避装置 | |
| JP2001259954A (ja) | フレキシブルトランスファ装置 | |
| KR0131674Y1 (ko) | 프레스의 슬라이드 낙하방지장치 | |
| JP3868079B2 (ja) | 自動工具交換装置 | |
| CN213475115U (zh) | 防夹型乘客电梯 | |
| JPS6013595Y2 (ja) | プレス機械の安全装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080312 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110321 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120321 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |