JP4136488B2 - 油圧駆動車の車速制御装置およびその制御方法 - Google Patents
油圧駆動車の車速制御装置およびその制御方法 Download PDFInfo
- Publication number
- JP4136488B2 JP4136488B2 JP2002186135A JP2002186135A JP4136488B2 JP 4136488 B2 JP4136488 B2 JP 4136488B2 JP 2002186135 A JP2002186135 A JP 2002186135A JP 2002186135 A JP2002186135 A JP 2002186135A JP 4136488 B2 JP4136488 B2 JP 4136488B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- vehicle speed
- vehicle
- motor
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Control Of Fluid Gearings (AREA)
Description
【発明の属する技術分野】
本発明は、油圧駆動車の車速制御装置およびその制御方法に係り、特に、タイヤで走行する油圧駆動車で坂道を下るときの車速制御装置およびその制御方法に関する。
【0002】
【従来の技術】
油圧駆動車では可変容量形油圧ポンプと可変容量形油圧モータあるいは固定容量形油圧モータとを閉回路で構成したものが一般的に用いられている。
特にタイヤ式の油圧駆動車では可変容量形油圧ポンプと可変容量形油圧モータとを用いて、操作性、作業性等を向上している。このようなタイヤ式の油圧駆動車では平地あるいは坂道等で暴走しないように、速度制御を行なうとともに、閉回路にチャージ圧を供給し減速走行時あるいは下り坂走行時における油圧モータのキャビテーションを防止している。
【0003】
タイヤ式の油圧駆動車で速度制御を行なう場合には、走行速度を車速センサで検出し所定の車速Vrmになるように油圧モータの容積を電気回路あるいは油圧回路で制御している。
例えばタイヤ式の油圧駆動車が所定の車速Vrmよりも早いときには油圧モータの容積を大きくするように制御し、また反対に所定の車速Vrmよりも遅いときには油圧モータの容積を小さくするように制御して所定の車速になるように制御している。
【0004】
【発明が解決しようとする課題】
しかしながら、上記の車速に制御する方法では、平地あるいは坂道を登るときには油圧モータの容積を制御することで所定の車速を得ることは比較的に容易であるが、下り坂走行時には所定の車速に制御することは、次に述べるように困難が伴なう。下り坂走行時では油圧駆動車の車体重量によるトルクが足回り(タイヤ)より油圧モータに作用するため、所定の車速Vrm近辺の制御では、図9に示すように車速のハンチングが生じ易くなっている。
【0005】
このハンチングを小さくするために油圧モータの容積の変化を少なくすると、坂道の角度が大きくなった場合に逆駆動トルクが大きくなりオーバラン状態が生じ易いため所定の車速に制御することが困難になる。
このように下り坂走行時では坂道の勾配により車速が異なるため、全ての勾配の領域でハンチングを生じないように制御することは困難であるという問題がある。
【0006】
本発明は上記の問題点に着目してなされたもので、油圧駆動車の車速制御装置およびその制御方法に係り、特に、タイヤで走行する油圧駆動車で坂道を下るとき車速差に応じた油圧モータの容積を得ているため、坂道の勾配に係らず、精度良く、ハンチングの少ない、油圧駆動車の車速制御装置およびその制御方法を提供することを目的とする。
【0007】
【課題を解決するための手段、作用及び効果】
上記目的を達成するために、本発明に係る油圧駆動車の車速制御装置の発明では、油圧駆動車が坂道を下るときの車速制御装置であって、
前記油圧駆動車の車速を可変とする可変容量形油圧モータと、前記可変容量形油圧モータの容積を可変とするモータ用傾転角制御機構と、前記油圧駆動車の車速を検出する前後進車速センサと、車速に対して予め設定された複数の制限速度と、前記制限速度毎に設定した容量ゲインと、前記モータ用傾転角制御機構を制御し、可変容量形油圧モータを所定の容積に制御する制御手段と、を備え、
前記前後進車速センサからの車速信号が所定形状の波形信号でないときには、前記制御手段は、可変容量形油圧モータの容積が最大容量となるように前記モータ用傾転角制御機構を制御してなり、
前記前後進車速センサからの車速信号が所定形状の波形信号であるときには、前記制御手段は、前記前後進車速センサからの検出車速から前記複数の各制限速度を減じた速度差が正の速度差となったものに対して、前記各正の速度差にそれぞれ対応した前記容量ゲインを積算して求めた値の総和に応じて前記モータ用傾転角制御機構を制御してなる構成としている。
【0008】
この場合において、前記各制限速度間毎に設定した容量ゲインの値が、前記複数の制限速度のうち制限速度の低いものから制限速度の高いものになるのに従って、順次大きな値となるように設定すると良い。
【0009】
また、前記複数の制限速度間における速度間隔が、制限速度の低いものから制限速度の高いものとなるのに従って、速度間隔を狭めて設定すると良い。
【0010】
また、前記前後進車速センサから受けた車速が最高制限速度を超えたときには、前記制御手段は、可変容量形油圧モータの容積が最大容量となるように前記モータ用傾転角制御機構を制御すると良い。
【0011】
本発明に係る油圧駆動車の車速制御方法の発明では、油圧駆動車が坂道を下るときの車速制御方法であって、
前記油圧駆動車の検出した車速信号が所定形状の波形信号でないときには、前記油圧駆動車を駆動する可変容量形油圧モータの容積が最大容量となるように制御してなり、
前記油圧駆動車の検出した車速信号が所定形状の波形信号であるときには、前記検出した車速から予め設定した複数の各制限速度を減じた速度差が正の値となる速度差を求めるとともに、前記各正の値となった速度差に前記制限速度毎に設定した容量ゲインを積算して求めた値の総和に応じて前記可変容量形油圧モータの容積を制御すると良い。
【0013】
上記構成によれば、油圧駆動車はオペレータの操作量に応じた走行速度で走行している。この走行速度は出力軸に配設されている前後進車速センサにより車速信号として検出され、所定形状の車速信号として制御手段に送信されている。またオペレータの操作量はポテンショメータで検出され、操作量に応じた速度指令信号が制御手段に送信されている。
制御手段は、ポテンショメータの操作量に応じて可変容量形モータのモータ傾転角制御機構を制御して操作量に応じた可変容量形モータの容積とし、その回転速度を得て油圧駆動車を走行させている。
また、制御手段は、予め設定された複数の制限速度と、前記制限速度毎に設定した容量ゲインとを記憶しており、前記前後進車速センサからの車速信号が所定形状の波形信号でないときには、前記制御手段は、可変容量形油圧モータの容積が最大容量となるように前記モータ用傾転角制御機構を制御する。
そして、前記前後進車速センサからの車速信号が所定形状の波形信号であるときには、前記制御手段は、前記前後進車速センサからの検出車速から前記複数の各制限速度を減じた速度差が正の速度差となったものに対して、前記各正の速度差にそれぞれ対応した前記容量ゲインを積算して求めた値の総和に応じて前記モータ用傾転角制御機構を制御して、油圧駆動車を走行させている。
【0014】
制御手段は、前記各制限速度間毎に設定した容量ゲインの値が、前記複数の制限速度のうち制限速度の低いものから制限速度の高いものになるのに従って、順次大きな値となるように設定している。
油圧駆動車は坂道を下るとき、油圧駆動車はその自重により足回りから駆動トルクを受けて車速が早くなることがある。しかしながら、油圧駆動車が坂道を下るときに前記のように正の車速差の大きさに応じた制御信号がモータ傾転角制御機構に出力されてモータの容積を得ているため、制限速度に沿った車速で精度良く走行できるとともに、ハンチングが生じることがほとんどなくなる。
【0015】
この制限速度は、複数の車速の制限速度が設けられているため、それぞれの制限速度範囲を狭くでき、細かい制御信号Pで制御ができ、制限速度に沿った車速が容易に得られる。また複数の制限速度で制御しているため坂道の大小の勾配に係らずハンチングがなく、精度良く、油圧駆動車を走行することができる。
また、複数の車速の制限速度が行なわれるとともに制限速度内のゲインをそれぞれ変更しているため、勾配が大きくなってもそれに適したゲインが選定できるので迅速に制限速度に沿って車速を制御することができる。これにより油圧駆動車は勾配の大小に係らず全領域で迅速に制限速度に、かつハンチングを少なくして制御することが可能となっている。
制御手段は、車速センサからの車速信号が最高速度より非常に早い車速信号であるとき、あるいは所定形状の波形でないときに車速センサ系統に異常が生じたと判断して可変モータを最大容積にして安全性の向上を図っている。
【0016】
【発明の実施の形態】
以下、本発明に係る油圧駆動車の車速制御装置およびその制御方法の実施形態について図面を参照して説明する。
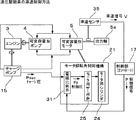
先ず、実施例である油圧駆動車の車速制御装置およびその制御方法について図1から図8を用いて説明する。図1は油圧駆動車の車速制御装置1の回路図、図2は車速信号の正常の波形形状を説明する図、図3は車速制御装置1のブロック図、図4は車速の制限速度を説明する図、図5は油圧駆動車の車速制御方法のフローチャート図、図6は車速信号の異常の波形形状を説明する図、図7は車速信号、制御圧、可変モータの容積の関係を説明する図、図8は制御圧と可変モータの容積の関係を説明する図である。
【0017】
図1において、油圧駆動車の車速制御装置1はエンジン3により駆動される可変容積形ポンプ4(以下、可変ポンプ4という)が可変容積形モータ5(以下、可変モータ5という)に配管6,7で接続され、閉回路を構成している。
可変ポンプ4はポンプ用傾転角制御機構9に接続されており、可変ポンプ4の斜板がポンプ用傾転角制御機構9により正逆方向に傾転し、例えば圧油を前進用として配管6に、または後進用として配管7に吐出している。以下では配管6,7は前進用配管6と後進用配管7にするとともに、前進にf、後進にbを付与して区別する。
【0018】
ポンプ用傾転角制御機構9はポンプ用傾転角シリンダ10(以下、ポンプ用シリンダ10という)とポンプ用切換弁11とにより形成されており、ポンプ用切換弁11は前進用ソレノイド12fと後進用ソレノイド12b、および前進用ポート13fと後進用ポート13bが設けられている。
ポンプ用切換弁11はエンジン3により駆動されるチャージポンプ15に接続されており、チャージポンプ15からのチャージ圧を受け、シリンダ用配管16f、16bを経てポンプ用シリンダ10に供給して図示しない斜板を傾転している。これにより可変ポンプ4の斜板がポンプ用傾転角制御機構9により正逆方向に傾転して圧油を前進用配管6または後進用配管7に吐出している。
【0019】
ポンプ用切換弁11は制御部17に接続されており、制御部17からの前進指令あるいは後進指令を受けて切り替わる。
チャージポンプ15はチャージ用配管18fにより前進用配管6に、またチャージ用配管18bにより後進用配管7に接続してチャージ圧を供給し、キャビテーションの発生を防止している。チャージ用配管18f、18bには、安全弁付逆止め弁19f、19bがそれぞれ配設されている。
【0020】
可変モータ5はモータ用傾転角制御機構21に接続されており、可変モータ5の斜板がモータ用傾転角制御機構21により傾転し、可変モータ5の容積dm(cc/rev)を可変としている。
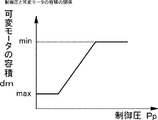
モータ用傾転角制御機構21はモータ用傾転角シリンダ24(以下、モータ用シリンダ24という)とモータ用サーボ弁25と電磁比例弁31により形成されている。モータ用傾転角制御機構21は、モータ用サーボ弁25が電磁比例弁31の制御圧Ppを受けて作動し、モータ用シリンダ24を縮小したときに斜板を最大傾転角Θmaxにして最大容積dmmaxに、また伸長したときに斜板を最小傾転角Θminにして最小容積dmminにしている。
【0021】
モータ用シリンダ24のボトム室24aはモータ用サーボ弁25に接続されており、またロッド室24bは前後進シャトル弁27を介して前進用配管6および後進用配管7に接続している。モータ用シリンダ24は、ボトム室24aおよびロッド室24bに圧油を受けたとき面積差により伸長して斜板を最小傾転角Θmin方向に揺動して容積dmを少なくする。
また、モータ用シリンダ24は、ボトム室24aがモータ用サーボ弁25を介してタンク28に接続しているときには、最縮小になり斜板を最大傾転角Θmaxに揺動し最大容積dmmaxにしている。
【0022】
モータ用シリンダ24は、シリンダロッド24cがばね30を介してモータ用サーボ弁25に連結している。シリンダロッド24cは移動に伴ってばね30を経てモータ用サーボ弁25の図示しないスプールを移動し、ボトム室24aの圧力とロッド室24bによるシリンダロッド24cに作用する力が均等になったときに停止し、モータ用サーボ弁25を経た圧油の供給を遮断している。
これによりモータ用シリンダ24はシリンダロッド24cがバランスした位置で保たれて斜板の傾転角を一定にして置き、可変モータ5を所定の回転速度に維持して回転を続けさせる。
【0023】
モータ用サーボ弁25は、一面側が前後進シャトル弁27を介して前進用配管6と後進用配管7、およびタンク28に接続されており、作動時には前進用配管6と後進用配管7との高い方の配管から圧油を受けている。
また他面側がモータ用シリンダ24のボトム室24aに接続されており、前後進シャトル弁27からの圧油をボトム室24aに供給してモータ用シリンダ24を伸長している。
モータ用サーボ弁25は、一端部にばね30およびパイロット圧としてロッド室24bに供給する圧油を、また他端部には電磁比例弁31、前後進シャトル弁27およびポンプ用切換弁11を介してチャージポンプ15に接続されパイロット圧として減圧されたチャージ圧油を受けている。
【0024】
モータ用サーボ弁25は電磁比例弁31の制御圧Ppにより作動し、高い制御圧Ppを受けたときにはM位置に切り替わり、前後進シャトル弁27を介して前進用配管6あるいは後進用配管7の圧油をボトム室24aに供給し、シリンダロッド24cを伸長している。シリンダロッド24cはその伸長に伴い、前記のごとくバランスした位置で停止しモータ用サーボ弁25からボトム室24aへの圧油の供給を遮断している。
前後進シャトル弁27は、一面側で前進用配管6、後進用配管7、シリンダ用配管16fからの前進用分岐配管33fおよびシリンダ用配管16bからの後進用分岐配管33bに接続している。また他面側ではモータ用シリンダ24のロッド室24bと、電磁比例弁31を介してモータ用サーボ弁25に接続している。
【0025】
前後進シャトル弁27は、その一端部が前進用分岐配管33fからの圧油を受けてNf位置に切り替わり、前進用ポート13fから電磁比例弁31を経てモータ用サーボ弁25に制御圧Ppを供給し、モータ用サーボ弁25を切り替えている。また前後進シャトル弁27は、前進用配管6の圧油をロッド室24bに供給するとともにモータ用サーボ弁25を介してボトム室24aに供給し、モータ用シリンダ24を面積差により伸長する。
同様に前後進シャトル弁27は他端部に後進用分岐配管33bからの圧油を受けてNr位置に切り替わり、後進用ポート13bから電磁比例弁31を経てモータ用サーボ弁25に制御圧Ppを供給し、モータ用サーボ弁25を切り替えている。
また、前後進シャトル弁27は、後進用配管7の圧油をロッド室24bに供給するとともにモータ用サーボ弁25を介してボトム室24aに供給し、モータ用シリンダ24を面積差により伸長する。
【0026】
電磁比例弁31は、一面側が前後進シャトル弁27に、他面側がモータ用サーボ弁25およびタンク28に接続している。電磁比例弁31は制御部17からの制御信号Pに応じて作動し、前後進シャトル弁27を経たチャージポンプ15のチャージ圧Pmaxを減圧し制御圧Ppとしてモータ用サーボ弁25に供給している。
電磁比例弁31は制御圧Ppをモータ用サーボ弁25に供給して切り替え、前進用配管6あるいは後進用配管7の圧油を前後進シャトル弁27からモータ用サーボ弁25を経てボトム室24aに供給し、モータ用シリンダ24を伸長している。これによりモータ用サーボ弁25は制御部17の制御信号Pに応じて電磁比例弁31から出された制御圧Ppにより作動し、可変モータ5の回転速度を制御している。
【0027】
制御部17は、ポテンショメータ34、車速センサ35、電磁比例弁31およびポンプ用切換弁11に接続されている。制御部17は、操作量に応じたポテンショメータ34の信号を受けて電磁比例弁31に制御信号Pを出力し、操作量に応じて可変モータ5の容積dmを制御している。
また、制御部17は車速センサ35から油圧駆動車の車速を受けて設定された車速の制限速度で油圧駆動車が走行するように制御信号Pを出力して制御している。例えば、詳細は後述するが、坂道を下るときに車速センサ35からの車速と設定している車速の制限速度とを比較して制御信号Pを求め、その制御信号Pを電磁比例弁31に出力して制御圧Ppをモータ用サーボ弁25に供給させ、可変モータ5の容積dmを制御部17の指令により制御している。
これにより制御部17は、油圧駆動車をハンチングが少なく、安定した制限速度で坂道を下るように制御している。この制御部17はコントローラにより形成されているが、CPUあるいはコンピュータで形成しても良い。
【0028】
ポテンショメータ34は図示しない運転席に配設された車速設定ダイアル等に付設されており、その操作量を検出して速度指令信号として制御部17に出力している。
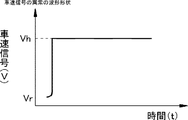
車速センサ35は、可変モータ5等の出力軸5aに付設されており、油圧駆動車の走行速度を検出し車速信号Vとして制御部17に出力している。この車速信号Vは、図2に示すようなパルス形状の車速信号Vを所定信号として出力している。
【0029】
図3は上記構成における油圧駆動車の車速制御装置1のブロック図である。図3において、制御部17には油圧駆動車の走行に伴って出力軸5aに配設されている車速センサ35から所定形状の車速信号Vが送信されている。また制御部17にはポテンショメータ34から操作量に応じた速度指令信号が送信されている。
制御部17は、ポテンショメータ34の操作量に応じて電磁比例弁31に制御信号Pを出力し、可変モータ5のモータ傾転角制御機構21を制御して操作量に応じた回転速度とし、油圧駆動車を走行させている。
【0030】
油圧駆動車が坂道を下るときには、油圧駆動車の自重により足回りから駆動力を受けて走行速度が早くなることがある。制御部17は油圧駆動車の早くなった走行速度を車速センサ35から車速信号Vとして受け、この車速信号Vが最高速度より非常に早い車速信号Vを受けたとき、あるいは所定形状の波形でないときに車速センサ系統に異常が生じたと判断して可変モータ5を最大容積dmmaxとして安全性の向上を図って車速制御を行っている。
また油圧駆動車が坂道を下るとき、制御部17は設定された車速の制限速度信号Vcと車速信号Vとを比較して車速差を求め、その車速差の大きさに応じた制御信号Pを電磁比例弁31に出力し、油圧駆動車を制限速度で走行するようにしている。
このとき電磁比例弁31は、制御部17が出力した制御信号Pに応じてチャージポンプ15のチャージ圧Pmaxを減圧して制御圧Ppとしてモータ傾転角制御機構21に出力している。
【0031】
モータ傾転角制御機構21は制御部17が出力した制御信号Pに応じて可変モータ5の容積dmを可変とし、油圧駆動車が設定された制御速度で走行するようにしている。このとき制御部17は設定された制限速度と車速の車速差の大きさに応じた制御信号Pをモータ傾転角制御機構21に出力してハンチングが生じないように制御している。
制御部17は、例えば図4に示すように設定された車速の制限速度を3段階とし、狭い制限速度範囲で制御信号Pを制御して出力することにより、油圧駆動車が坂道を図4の実線Wに示すようにハンチングがなく、精度良く安定して坂道を下るようにしている。
【0032】
次に油圧駆動車の車速制御方法について説明する。
油圧駆動車が坂道を下がるときの制御方法について図5のフローチャートを用いて説明する。
ステップ1で油圧駆動車が坂道を下るときにオペレータは車速設定ダイアルを操作して所定速度で走行する。車速設定ダイアルに付設されたポテンショメータ34は操作量を検出し操作信号として制御部17に送信する。制御部17は、操作量に応じた信号を受けて電磁比例弁31に制御信号Pを出力し、操作量に応じた制御圧Ppをモータ用サーボ弁25に出力させる。モータ用サーボ弁25はモータ用シリンダ24を伸長し、例えば斜板を大きく傾転し可変モータ5の容積dmを小さくして油圧駆動車を所定速度で走行させて坂道を下っている。
【0033】
ステップ2で油圧駆動車の走行速度は車速センサ35で検出され、その車速信号Vが制御部17に送信される。
ステップ3で制御部17は、車速センサ35からの車速信号Vが最大車速信号である第3制限速度信号Vcmaxよりも非常に大きい(V≫Vcmax)か、否かを判定する。例えば、車速信号Vが最大車速信号である第3制限速度信号Vcmaxの1.2倍の車速を超えているか、否かを判定する。
ステップ3で非常に大きい場合(YES)には、車速センサ35およびハーネスショート等の車速センサ系統の故障と判断してステップ4に行く。
【0034】
ステップ4で制御部17は電磁比例弁31に第3制御信号Pを出力し、電磁比例弁31をタンク28に接続してモータ用サーボ弁25への制御圧Ppを最小制御圧Ppminにする。
モータ用サーボ弁25は、モータ用シリンダ24のボトム室24aをタンク28に接続して、モータ用シリンダ24を縮小して可変モータ5を最大容積dmmaxにして、油圧駆動車の走行速度を低減する。
ステップ3で非常に大きくない場合(NO)には正常の車速信号Vとしてステップ5に行く。
【0035】
ステップ5では車速信号Vが所定形状の波形信号か、否かを判定する。
ステップ5で車速信号Vが図2に示すような正常の波形信号でない場合(NO)、例えば図6に示すように車速信号Vが一定値の場合には車速センサ35およびハーネスショート等の車速センサ系統の故障と判断してステップ4に行く。
ステップ4では前記のように制御部5が第3制御信号Pをモータ傾転角制御機構21に出力して可変モータ5を最大容積dmmaxにして、油圧駆動車の走行速度を低減する。
ステップ5で車速信号Vが正常の波形信号の場合(YES)にはステップ6に行く。
【0036】
ステップ6では、車速信号Vが第1制限速度信号Vcnを超えているか、否かを判断している。
ステップ6で車速信号Vが第1制限速度信号Vcnを超えていない場合(NO)にはステップ1に戻り、制御部17は電磁比例弁31に制御信号Pを出力し、操作量に応じた制御圧Ppをモータ用サーボ弁25に出力させ、操作量に応じて油圧駆動車を走行させる。
ステップ6で車速信号Vが第1制限速度信号Vcnを超えている場合(YES)にはステップ7に行く。
ステップ7では、車速信号Vが第2制限速度信号Vciを超えているか、否かを判断している。
【0037】
ステップ7で車速信号Vが第2制限速度信号Vciを超えていない場合(NO)にはステップ8に行く。
ステップ8で制御部17は、車速信号V、第1制限速度信号Vcnおよび第1ゲインKpsとから数式1を用いて第1制御信号Psを求めて電磁比例弁31に指令を出力する。電磁比例弁31は制御部17により作動して第1制御信号Psをモータ用サーボ弁25に出力しモータ用シリンダ24を伸縮し、所定の回転速度になるように可変モータ5の容積dmを制御する。
【0038】
第1制御信号Psは、次の数式1で求められる。
Ps=Pmax−Kps(V−Vcn) (数式1)
ここで、
Ps :第1制御信号
Pmax:最大制御圧(電磁比例弁の最大制御圧信号)
V :車速信号
Vcn:第1制限速度信号
Kps:第1ゲイン(実験値)
である。
【0039】
ステップ8では、例えば、図7に示すように、坂道を下る油圧駆動車の車速信号Vaが第1制限速度信号Vcnを超えて第2制限速度信号Vci以下の場合に、点線で示すように車速信号Vaより第1ゲインKpsを用いて引かれた車速信号Vと制御圧Ppとの関係線Lsより第1制御信号Psを求める。
次に、求めた第1制御信号Psより図8に示す制御圧Ppと容積dmとの関係を用いた線Qsでモータ用サーボ25を制御して、図7の点線で示すように油圧駆動車を所定走行速度で坂道を下るように可変モータ5の容積dmaを得る。
このとき、第1制限速度信号Vcnと第2制限速度信号Vciとの間隔を適宜に選択するとともに、第2制限速度信号Vci以上も制御することで制限速度範囲を狭くすることができて、油圧駆動車はハンチングが生ずることを防止できるとともに、精度良く、安定した制限速度で走行することができる。
【0040】
ステップ7で車速信号Vが第2制限速度信号Vciを超えている場合にはステップ9に行く。
ステップ9では、車速信号Vが第3制限速度信号Vcmaxを超えているか、否かを判断している。
ステップ9で車速信号Vが第3制限速度信号Vcmaxを超えていない場合(NO)にはステップ10に行く。
ステップ10で制御部17は、車速信号V、第1制限速度信号Vcn、第1ゲインKps、第2制限速度信号Vci、第2ゲインKprとから数式2を用いて第2制御信号Prを求めて電磁比例弁31に指令を出力する。電磁比例弁31は制御部17により作動して第2制御信号Prをモータ用サーボ弁25に出力しモータ用シリンダ24を伸縮し、所定の回転速度になるように可変モータ5の容積dmを制御する。
【0041】
第2制御信号Prは、次の数式2で求められる。
Pr=Pmax−Kps(V−Vcn)−Kpr(V−Vci) (数式2)
ここで、
Pr :第2制御信号
Pmax:最大制御圧(電磁比例弁の最大制御圧信号)
V :車速信号
Vcn:第1制限速度信号
Vci:第2制限速度信号
Kps:第1ゲイン(実験値)
Kpr:第1ゲイン(第1ゲインより大きい実験値)
である。
【0042】
ステップ10では、例えば、図7に示すように、坂道を下る油圧駆動車の車速信号Vbが第2制限速度信号Vciを超えて第3制限速度信号Vcmax以下の場合に、一点鎖線で示すように車速信号Vbより第1ゲインKpsと第2ゲインKprを用いて引かれた車速信号Vと制御圧Ppとの関係線Lrより第2制御信号Prを求める。
次に、求めた第2制御信号Prより制御圧Ppと容積dmとの関係線Qrを用いてモータ用サーボ25を制御して、図7の一点鎖線で示すように油圧駆動車を所定走行速度で坂道を下るように可変モータ5の容積dmbを得る。このとき急な勾配あるいは速い速度で走行するときに、第2制御信号Prが第2制限速度信号Vciと第3制限速度信号Vcmaxとの間の狭い範囲で制御されるとともに容積dmを大きく変化させて制御することにより、ハンチングが生ずることを防止し、かつ迅速に所定速度を得ている。
ステップ9で車速信号Vが第3制限速度信号Vcmaxを超えている場合にはステップ4に行く。ステップ4では前記のように可変モータ5を最大容積dmmaxにして、油圧駆動車の走行速度を低減する。
【0043】
なお、上記実施例において、可変ポンプ4と可変モータ5とは閉回路で接続したが、開回路で接続しても良い。上記の車速制御装置1はタイヤ式油圧駆動車を用いた車両に適用する例を示したが、無限軌道輪を用いた車両に適用しても良い。制御速度は3段階で制御したが更に多い段階で制御することができる。電磁比例弁31は、前後進シャトル弁27を介してチャージポンプ15のチャージ圧油を受けて制御圧Ppとしたが、直接チャージポンプ15からの圧油を受けて制御圧Ppとしても良い。
【図面の簡単な説明】
【図1】本発明に係る油圧駆動車の車速制御装置の回路図である。
【図2】車速信号の正常の波形形状を説明する図である。
【図3】本発明に係る油圧駆動車の車速制御方法のブロック図である。
【図4】本発明に係る車速制限速度を説明する図である。
【図5】本発明に係る油圧駆動車の車速制御方法のフローチャート図である。
【図6】車速信号の異常の波形形状を説明する図である。
【図7】車速信号、制御圧、可変モータの容積の関係を説明する図である。
【図8】制御圧と可変モータの容積の関係を説明する図である。
【図9】従来例の車速を説明する図である。
【符号の説明】
1…油圧駆動車の車速制御装置、3…エンジン、4…可変容積形ポンプ、5…可変容積形モータ、9…ポンプ用傾転角制御機構、10…ポンプ用傾転角シリンダ、11…ポンプ用切換弁、15…チャージポンプ、17…制御部、21…モータ用傾転角制御機構、24…モータ用傾転角シリンダ、25…モータ用サーボ弁、27…前後進シャトル弁、27…タンク、31…電磁比例弁、34…ポテンショメータ、35…車速センサ。
Claims (5)
- 油圧駆動車が坂道を下るときの車速制御装置であって、
前記油圧駆動車の車速を可変とする可変容量形油圧モータと、
前記可変容量形油圧モータの容積を可変とするモータ用傾転角制御機構と、
前記油圧駆動車の車速を検出する前後進車速センサと、
車速に対して予め設定された複数の制限速度と、
前記制限速度毎に設定した容量ゲインと、
前記モータ用傾転角制御機構を制御し、可変容量形油圧モータを所定の容積に制御する制御手段と、
を備え、
前記前後進車速センサからの車速信号が所定形状の波形信号でないときには、前記制御手段は、可変容量形油圧モータの容積が最大容量となるように前記モータ用傾転角制御機構を制御してなり、
前記前後進車速センサからの車速信号が所定形状の波形信号であるときには、前記制御手段は、前記前後進車速センサからの検出車速から前記複数の各制限速度を減じた速度差が正の速度差となったものに対して、前記各正の速度差にそれぞれ対応した前記容量ゲインを積算して求めた値の総和に応じて前記モータ用傾転角制御機構を制御してなることを特徴とする油圧駆動車の車速制御装置。 - 前記各制限速度間毎に設定した容量ゲインの値が、前記複数の制限速度のうち制限速度の低いものから制限速度の高いものになるのに従って、順次大きな値となるように設定されてなることを特徴とする請求項1記載の油圧駆動車の車速制御装置。
- 前記複数の制限速度間における速度間隔が、制限速度の低いものから制限速度の高いものとなるのに従って、速度間隔を狭めて設定されてなることを特徴とする請求項1又は2記載の油圧駆動車の車速制御装置。
- 前記前後進車速センサから受けた車速が最高制限速度を超えたときには、前記制御手段は、可変容量形油圧モータの容積が最大容量となるように前記モータ用傾転角制御機構を制御してなることを特徴とする請求項1〜3のいずれかに記載の油圧駆動車の車速制御装置。
- 油圧駆動車が坂道を下るときの車速制御方法であって、
前記油圧駆動車の検出した車速信号が所定形状の波形信号でないときには、前記油圧駆動車を駆動する可変容量形油圧モータの容積が最大容量となるように制御してなり、
前記油圧駆動車の検出した車速信号が所定形状の波形信号であるときには、前記検出した車速から予め設定した複数の各制限速度を減じた速度差が正の値となる速度差を求めるとともに、前記各正の値となった速度差に前記制限速度毎に設定した容量ゲインを積算して求めた値の総和に応じて前記可変容量形油圧モータの容積を制御してなることを特徴とする油圧駆動車の車速制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002186135A JP4136488B2 (ja) | 2002-06-26 | 2002-06-26 | 油圧駆動車の車速制御装置およびその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002186135A JP4136488B2 (ja) | 2002-06-26 | 2002-06-26 | 油圧駆動車の車速制御装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004028229A JP2004028229A (ja) | 2004-01-29 |
| JP4136488B2 true JP4136488B2 (ja) | 2008-08-20 |
Family
ID=31181571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002186135A Expired - Fee Related JP4136488B2 (ja) | 2002-06-26 | 2002-06-26 | 油圧駆動車の車速制御装置およびその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4136488B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100404917C (zh) * | 2005-11-09 | 2008-07-23 | 西南大学 | 机动车辆传动传感装置 |
| CN100416140C (zh) * | 2005-11-09 | 2008-09-03 | 西南大学 | 变速器自适应扭矩、转速传动传感装置 |
| WO2008123376A1 (ja) * | 2007-03-30 | 2008-10-16 | Komatsu Ltd. | 静油圧式無段変速機を備えた車両の制御装置 |
| JP4978688B2 (ja) * | 2009-12-22 | 2012-07-18 | コベルコクレーン株式会社 | 走行速度制御システム |
| JP5902877B1 (ja) * | 2014-09-18 | 2016-04-13 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP2021099122A (ja) * | 2019-12-20 | 2021-07-01 | 川崎重工業株式会社 | 静油圧無段変速システム |
-
2002
- 2002-06-26 JP JP2002186135A patent/JP4136488B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004028229A (ja) | 2004-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8418798B2 (en) | Industrial vehicle | |
| JP5192601B1 (ja) | 作業車両及び作業車両の制御方法 | |
| US8286748B2 (en) | Work vehicle | |
| EP2123541B1 (en) | Steering system for working vehicle | |
| US6336518B1 (en) | Travel assisting hydraulic circuit for hydraulic drive type working vehicle | |
| CN103502698B (zh) | 作业车辆及作业车辆的控制方法 | |
| CN102959285B (zh) | 作业车辆及作业车辆的控制方法 | |
| US10920399B2 (en) | Work vehicle and control method for work vehicle | |
| US12180683B2 (en) | Work vehicle and control method for work vehicle | |
| CN100383434C (zh) | 行驶控制装置、液压驱动车辆、以及轮式液压挖掘机 | |
| CN104412010B (zh) | 轮式装载机 | |
| JP2008248981A (ja) | 作業機の走行システム | |
| US11125327B2 (en) | Work vehicle and control method for work vehicle | |
| JP4136488B2 (ja) | 油圧駆動車の車速制御装置およびその制御方法 | |
| JP4115994B2 (ja) | 建設機械の制御装置および入力トルク演算方法 | |
| JP6335340B1 (ja) | 作業機械 | |
| AU2016259394B1 (en) | Work vehicle and method of controlling operation | |
| US20220049465A1 (en) | Working machine | |
| JPH04366069A (ja) | 可変速用可変容量油圧ポンプを備えたエンジン車両 | |
| JP4180035B2 (ja) | 油圧駆動車の制動制御装置 | |
| JPH02275177A (ja) | 可変速用可変容量油圧ポンプを備えたエンジン車両における走行制御装置 | |
| JP2021152383A (ja) | 作業車両の変速装置 | |
| JPH03275818A (ja) | 油圧駆動車両の原動機制御装置 | |
| JPH0967836A (ja) | 油圧駆動走行装置 | |
| JPH0427669A (ja) | 作業車両の油圧式操向制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071101 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071121 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080116 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20080116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080318 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080603 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080603 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4136488 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110613 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130613 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |