JP4155152B2 - 交流回転電機装置 - Google Patents
交流回転電機装置 Download PDFInfo
- Publication number
- JP4155152B2 JP4155152B2 JP2003352504A JP2003352504A JP4155152B2 JP 4155152 B2 JP4155152 B2 JP 4155152B2 JP 2003352504 A JP2003352504 A JP 2003352504A JP 2003352504 A JP2003352504 A JP 2003352504A JP 4155152 B2 JP4155152 B2 JP 4155152B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- current
- harmonic
- order
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Landscapes
- Control Of Ac Motors In General (AREA)
Description
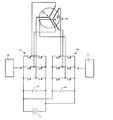
前記各相巻線が、相電流通電可能に接続された複数の前記相巻線からそれぞれ構成される第1相巻線群および第2相巻線群に区分され、前記モータ電流制御手段が、前記相電流の基本周波数成分を主とする各相の基本相電流を形成して前記第1相巻線群に相ごとに通電する第1インバータと、前記相電流に起因する磁気騒音低減用の高調波電流を形成して前記第2相巻線群に相ごとに通電する第2インバータとを有することを特徴としている。
(変形態様)
以下、本発明の種々の態様について説明する。
(原理説明)
以下、本発明を多相交流回転電機に適用した場合の原理を以下に説明する。

丸数字1で示される項は直流成分項、
丸数字2で示される項はロータ起磁力Fmagの3次の高調波により生じる6次の高調波成分、
丸数字3で示される項はロータ起磁力Fmagの1次と5次の高調波により生じる6次の高調波成分、
丸数字4で示される項はロータ起磁力Fmagの1次と7次の高調波により生じる6次の高調波成分、
丸数字5で示される項はロータ起磁力Fmagの5次と7次の高調波により生じる12次の高調波成分、
丸数字6で示される項はロータ起磁力Fmagの5次の高調波とステータ電流の1次電流成分(基本波)により生じる6次の高調波成分、
丸数字7で示される項はロータ起磁力Fmagの7次の高調波とステータ電流の1次電流成分(基本波)により生じる6次の高調波成分となる。
丸数字9で示される項はロータ起磁力Fmagの1次の成分(基本波)とステータ電流の13次の高調波により生じる12次の高調波成分、
丸数字10で示される項はロータ起磁力Fmagの5次の高調波とステータ電流の7次の高調波により生じる12次の高調波成分、
丸数字11で示される項はロータ起磁力Fmagの5次の高調波とステータ電流の13次の高調波により生じる18次の高調波成分、
丸数字12で示される項はロータ起磁力Fmagの7次の高調波とステータ電流の13次の高調波により生じる6次の高調波成分、
丸数字13で示される項はステータ電流の1次の成分(基本波)と7次の成分により生じる6次の高調波成分、
丸数字14で示される項はステータ電流の1次の成分(基本波)と13次の成分により生じる12次の高調波成分、
丸数字15で示される項はステータ電流の7次の成分と13次の成分により生じる6次の高調波成分である。
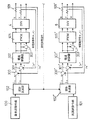
上記した高調波電流を発生する回路例を図3に示す。このモータ制御回路はモータ電流をフィードバック制御を行う実施例である。
上記した高調波電流を発生する他の回路例を図5に示す。この回路は、図4に示す回路をオープン制御に変更したものである。
上記した高調波電流を発生する他の回路例を図6に示す。この回路例は三相交流座標系にてモータ電流をフィードバック制御を行う実施例である。
(変形態様)
上記した回路例の他、種々の公知モータ制御回路を採用できることは当然である。また、基本波形成用のモータコントローラ6と、高調波形成用のコントローラ7とは全く異なる回路としてもよく、また、クロック周波数が異なるようにしてもよい。たとえば、モータコントローラ6は高精度フィードバック回路とし、モータコントローラ7はオープン制御回路としてもよい。
(変形態様)
上記各回路例の変形態様を図7に示すフローチャートを参照して以下に説明する。この変形態様は、必要電流(必要トルク)と回転数とに基づいて第2インバータの動作モードを変更するものである。
(変形態様)
なお、数35、数36、数37の式は、ロータ起磁力Fmagの高調波成分をステータ電流の基本波電流への高調波電流の重畳によりキャンセル乃至変更する例を示しているが、実際の交流回転電機のPWM制御では、インバータのスイッチングにより基本波電流に不可避的に高調波が重畳し、これに起因して磁気音が生じる。この磁気音を更に減少するには、このインバータのスイッチングによりステータ電流に不可避的に重畳する高調波電流を上記数式で求めた磁気音変更用の高調波電流からベクトル減算した高調波電流を基本波電流に重畳する演算を行えばよい。
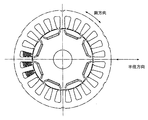
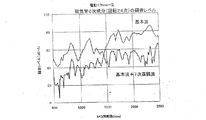
上記磁気騒音低減のための実験を図8に示す三相同期機(8極、24スロット、IPM)14を用いて行った。なお、基本波電流を43Aとし、ロータ位相角はトルクが最大となる値に制御した。
なお、上記実施例の回路による高調波の重畳技術を利用して、すなわち周方向振動より次数が1大きい高調波電流を基本周波数成分に重畳することにより
、磁気騒音低減をやめて必要に応じてトルクリップル低減を行うように切り替えることもできる。具体的には、高調波電流の振幅と位相角を変更すればよい。
数35、数36、数37の式は、ロータ起磁力Fmagの高調波成分をステータ電流の基本波電流への高調波電流の重畳によりキャンセル乃至変更する例を示しているが、実際の交流回転電機のPWM制御では、インバータのスイッチングにより基本波電流に不可避的に高調波が重畳し、これに起因して磁気音が生じる。この磁気音を更に減少するには、このインバータのスイッチングによりステータ電流に不可避的に重畳する高調波電流を上記数式で求めた磁気音変更用の高調波電流からベクトル減算した高調波電流を基本波電流に重畳する演算を行えばよい。
上記磁気騒音低減方式の回転電機をエンジン走行車両に搭載した場合の制御動作を図16に示すフローチャートを参照して説明する。なお、この種の回転電機は、たとえばハイブリッド車やトルクアシスト車用の発電電動機や電動エアコン等として広く用いられ、周知となっている。
重畳する高調波電流の制御参考例を、図17〜図20を参照して説明する。図17はこの実施例のモータ制御装置を示すブロック回路図、図18は座標変換回路2の一例を示すブロック回路図、図19は回路各部の信号波形(回転座標系表示)を示す波形図、図20は回路各部の信号波形(静止座標系表示)を示す波形図である。
系の回転角θを演算し、遅れ補償回路16および座標変換回路17に出力する。遅れ補償回路16は、位相補償回路であって、位相補償された回転角θvを座標変換回路24、25および後述する座標変換回路9に出力し、これらの回路の演算遅れなどを補償する。座標変換回路17は、電流センサ12で検出されたU相電流IuとV相電流Ivとを座標変換処理することにより、回転座標系表示の電流検出値としてのd軸検出値Idとq軸検出値Iqとを出力する。
(変形態様)
上記した数式を用いた説明では、3、5、7次高調波を含むロータ起磁力Fmagにより生じる6次、12次の磁気音を7次、13次の高調波電流成分の重畳によりキャンセル又は低減する場合を示した。上記と同様の計算を行った結果、ある次数の高調波電流を重畳することにより、少なくともこの次数より1だけ低い次数の磁気騒音、もしくは、この次数より1だけ低い次数の磁気騒音と他の次数の磁気騒音とを低減乃至キャンセルできることがわかった。
5 第2インバータ
6 第1のモータコントローラ
7 第2のモータコントローラ
8 交流回転電機
81 第1相巻線群
82 第2相巻線群
Claims (9)
- m(mは3以上の正の整数)相の相巻線を有する電機子巻線を有する交流回転電機と、
前記各相巻線に所定の基本周波数及び振幅を有する各相電流を個別に通電するモータ電流制御手段と、
を備えるモータ制御装置において、
前記各相巻線は、
相電流通電可能に接続された複数の前記相巻線からそれぞれ構成される第1相巻線群および第2相巻線群に区分され、
前記モータ電流制御手段は、
前記相電流の基本周波数成分を主とする各相の基本相電流を形成して前記第1相巻線群に相ごとに通電する第1インバータと、
前記相電流に起因する磁気騒音低減用の高調波電流を形成して前記第2相巻線群に相ごとに通電する第2インバータと、
を有することを特徴とする交流回転電機装置。 - 請求項1記載の交流回転電機装置において、
前記第2インバータは、
前記交流回転電機の回転軸の軸心を中心として放射状に発生する振動である径方向振動のうちの前記基本周波数成分のn次(倍)の高調波成分を減衰させる位相および振幅にて、前記相電流の基本周波数成分のn+1次(倍)の高調波成分を主とする各相の径方向振動低減用高調波電流を前記第2相巻線群に相ごとに通電することを特徴とする交流回転電機の磁気騒音低減方法。 - 請求項2記載の交流回転電機装置において、
前記第2インバータは、
三相相電流の基本周波数成分に対して7次以上の奇数高調波成分を主とする前記径方向振動低減用高調波電流を形成することを特徴とする交流回転電機装置。 - 請求項3記載の交流回転電機装置において、
前記第2インバータは、
7次高調波成分を主とする前記径方向振動低減用高調波電流を形成することを特徴とする交流回転電機装置。 - 請求項3記載の交流回転電機装置において、
前記第2インバータは、
13次高調波成分を主とする前記径方向振動低減用高調波電流を形成することを特徴とする交流回転電機装置。 - 請求項3記載の交流回転電機装置において、
前記第2インバータは、
7次および13次の高調波成分を主とする前記径方向振動低減用高調波電流を形成することを特徴とする交流回転電機装置。 - 請求項2記載の交流回転電機装置において、
前記第2インバータは、
所定値未満の小出力時において前記径方向振動低減用高調波電流を形成する振動低減運転モードで運転され、所定値以上の大出力時において前記径方向振動低減用高調波電流に代えて、前記相電流の基本周波数成分を主とする各相の基本相電流を形成して前記第2相巻線群に相ごとに通電する出力優先モードで運転されることを特徴とする交流回転電機装置。 - 請求項3記載の交流回転電機装置において、
前記第2インバータは、
19次の前記径方向振動低減用高調波電流を重畳することにより、18次の周波数を有する前記径方向振動の高調波成分を前記重畳を行わない場合よりも減衰させることを特徴とする交流回転電機装置。 - 請求項3記載の交流回転電機装置において、
前記第2インバータは、
25次の前記径方向振動低減用高調波電流を重畳することにより、24次の周波数を有する前記径方向振動の高調波成分を前記重畳を行わない場合よりも減衰させることを特徴とする交流回転電機装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003352504A JP4155152B2 (ja) | 2003-10-10 | 2003-10-10 | 交流回転電機装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003352504A JP4155152B2 (ja) | 2003-10-10 | 2003-10-10 | 交流回転電機装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005117863A JP2005117863A (ja) | 2005-04-28 |
| JP4155152B2 true JP4155152B2 (ja) | 2008-09-24 |
Family
ID=34543423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003352504A Expired - Fee Related JP4155152B2 (ja) | 2003-10-10 | 2003-10-10 | 交流回転電機装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4155152B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112017002075T5 (de) | 2016-04-19 | 2019-01-24 | Nidec Corporation | Motor und elektrische servolenkvorrichtung |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4720653B2 (ja) * | 2006-07-07 | 2011-07-13 | トヨタ自動車株式会社 | 電動機制御装置およびそれを備えた車両 |
| JP2008289322A (ja) * | 2007-05-21 | 2008-11-27 | Toshiba Corp | 制御装置 |
| US8169181B2 (en) * | 2009-08-28 | 2012-05-01 | Indian Institute Of Science | Induction motor |
| EP3306811B1 (en) * | 2015-05-27 | 2024-09-04 | Mitsubishi Electric Corporation | Device for controlling ac rotary machine and device for controlling electric power steering |
| CN111742487B (zh) * | 2018-02-23 | 2023-09-29 | 三菱电机株式会社 | 旋转电机的控制方法、旋转电机的控制装置以及驱动系统 |
| JP6872293B2 (ja) * | 2018-02-23 | 2021-05-19 | 三菱電機株式会社 | 回転電機の制御方法、回転電機の制御装置、及び駆動システム |
| CN111830436A (zh) * | 2020-07-30 | 2020-10-27 | 南京理工大学 | 基于灰色预测理论的电驱动系统功率管开路故障诊断方法 |
-
2003
- 2003-10-10 JP JP2003352504A patent/JP4155152B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112017002075T5 (de) | 2016-04-19 | 2019-01-24 | Nidec Corporation | Motor und elektrische servolenkvorrichtung |
| US10998782B2 (en) | 2016-04-19 | 2021-05-04 | Nidec Corporation | Motor and electric power steering apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005117863A (ja) | 2005-04-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1553693B1 (en) | Ac rotary electric machine magnetic noise reduction method, motor control device and ac rotary electric machine using the same | |
| JP2005328691A (ja) | モータ制御装置 | |
| JP4155155B2 (ja) | 交流回転電機の磁気騒音低減方法及びそれを用いるモータ制御装置 | |
| JP4269881B2 (ja) | 交流回転電機装置 | |
| JP4117554B2 (ja) | モータ制御装置 | |
| JP4239886B2 (ja) | 交流回転電機の磁気音制御方法 | |
| JP2005304237A (ja) | 交流回転電機の磁気音制御方法 | |
| JP2008295206A (ja) | ベアリングレスモータ及びベアリングレスモータ制御システム | |
| JP2020010474A (ja) | モータ駆動システム | |
| JP2015128368A (ja) | 回転機の制御装置 | |
| JP4155152B2 (ja) | 交流回転電機装置 | |
| JP2008236923A (ja) | Pmモータの渦電流低減方法および装置 | |
| JP2008072832A (ja) | 交流電動機の制御装置およびその鉄損抑制用重畳電流の演算方法 | |
| JP6708786B2 (ja) | 回転電機の制御装置及びその制御方法 | |
| JP7319459B2 (ja) | モータ制御装置、電動車両、およびモータ制御方法 | |
| JP3586593B2 (ja) | モータ制御装置 | |
| CN111742487A (zh) | 旋转电机的控制方法、旋转电机的控制装置以及驱动系统 | |
| JP6988447B2 (ja) | モータの制御方法、およびモータの制御装置 | |
| Miyama et al. | Technical arrangement of high-performance techniques achieved by multi-phase permanent magnet synchronous motor systems | |
| JP2011019336A (ja) | 電動機制御装置 | |
| JP2008043175A (ja) | 電動機の制御装置 | |
| JP7267487B1 (ja) | 回転電機の制御装置および回転電機の制御方法 | |
| JP5352380B2 (ja) | 電動機 | |
| JP4742658B2 (ja) | 同期機の電流制御装置及び電流制御方法 | |
| JP4724078B2 (ja) | 電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080617 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080630 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4155152 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120718 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120718 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130718 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |