JP4211073B2 - 楕円振動フィーダの駆動制御方法及びその装置 - Google Patents
楕円振動フィーダの駆動制御方法及びその装置 Download PDFInfo
- Publication number
- JP4211073B2 JP4211073B2 JP36320997A JP36320997A JP4211073B2 JP 4211073 B2 JP4211073 B2 JP 4211073B2 JP 36320997 A JP36320997 A JP 36320997A JP 36320997 A JP36320997 A JP 36320997A JP 4211073 B2 JP4211073 B2 JP 4211073B2
- Authority
- JP
- Japan
- Prior art keywords
- trough
- phase difference
- drive control
- vibration feeder
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 16
- 238000006073 displacement reaction Methods 0.000 claims description 38
- 238000001514 detection method Methods 0.000 claims description 13
- 230000003247 decreasing effect Effects 0.000 claims description 8
- 230000001965 increasing effect Effects 0.000 claims description 7
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000005060 rubber Substances 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 229910052845 zircon Inorganic materials 0.000 description 1
- GFQYVLUOOAAOGM-UHFFFAOYSA-N zirconium(iv) silicate Chemical compound [Zr+4].[O-][Si]([O-])([O-])[O-] GFQYVLUOOAAOGM-UHFFFAOYSA-N 0.000 description 1
Images











Landscapes
- Jigging Conveyors (AREA)
Description
【発明の属する技術分野】
本発明は楕円振動フィーダの駆動制御方法及びその装置に関する。
【0002】
【従来の技術】
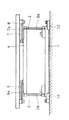
トラフを水平方向に振動可能に支持する第1ばねと、前記トラフを垂直方向に振動可能に支持する第2ばねと、前記トラフを水平方向に加振する第1電磁石と、前記ボウルを垂直方向に加振する第2電磁石とを備えた楕円振動フィーダは公知である。例えば、特開昭55−84707号公報に記載の振動フィーダによれば、図9に示すように直線的なトラフもしくはトラック8は公知のように断面がU字形状の部品移送路を有するがこの両端部において水平な板ばね6、7の一端にボルトで固定されており、この他端部は中間板4に固定されている。下方には基板1が防振ゴム12により床上に支持されていて、これに垂直に延びる板ばね2、3の下端部が固定され、この上端部は中間板4に固定されている。また、中間板4には図10に示すように陸上トラック形状の開口4aが形成されており、これにトラフ8の中間部に固定されている接続板11を挿通させている。これは基台1に固定された垂直加振用電磁石9に空隙をおいて対向しており、また、中間板4には可動コア10が固定され、これは水平加振用電磁石5に空隙をおいて対向している。本公開明細書に記載されているように「第1マグネット6と第2マグネット8を単独に加振トラック8へ水平方向と鉛直方向にそれぞれ相互に位相と振巾の異なる振動を発生させ、トラック8上のワークに適用した任意の振動リサージは得られる」としている。明確には記載されていないが、この振動リサージが楕円振動である。また一般にこの種の電磁振動フィーダはその機械系の共振周波数に駆動周波数を近づけて共振振動させて電力を有効に利用するものであるが、この点については何ら記載されていない。
【0003】
然るに振動工学上明らかなように、共振周波数で振動系を駆動した場合には、電源のわずかな変動やトラフ内の部品の負荷のわずかな変化により共振周波数が変動する。これにより、部品を貯蔵していない空の状態で、水平方向に共振していて力と変位との位相差が90度であっても、このような変動により大きく位相差が変わり、よって、強制振動で駆動されている垂直方向においては位相差がそれほど変動せずとも、水平方向において大きく変動するために、結局これらの位相差は60度とは異なったものとなる。これにより、トラフに対する最適振動条件が得られなくなる。本出願人は上述の問題に鑑みてなされ、電源に多少の変動があったり、トラフ内の部品の負荷が変わっても、水平方向及び垂直方向の位相差角を最適な値に保持し得る楕円振動装置を先に提案した(特開平8−268531号)。以上の公報に開示される楕円振動装置は自励振動により、確かに水平方向には共振し、かつこれと60度の位相差を持って垂直方向に振動するのであるが、自励発振のための条件が厳しく場合によっては自励発振を開始しないような場合がある。
【0004】
【発明が解決しようとする課題】
本発明は上述の問題に鑑みてなされ、電源に多少の変動があったり、トラフの部品の負荷が変わっても確実に例えば水平方向にはトラフを共振振動させることができ、また垂直方向にこれと最適な位相差角を持って振動させることができる楕円振動フィーダの駆動制御方法及びその装置を提供することを課題とする。
【0005】
【課題を解決するための手段】
以上の課題は、トラフを水平方向に振動可能に支持する第1ばねと、前記トラフを垂直方向に振動可能に支持する第2ばねと、前記トラフを水平方向に加振する第1電磁石と、前記トラフを垂直方向に加振する第2電磁石とを備えた楕円振動フィーダの駆動制御方法において、前記第1、第2電磁石の一方のコイルに印加される第1電圧と、前記トラフの該一方の電磁石が加振する方向の前記トラフの振動変位との位相の進み又は遅れを前記電圧の負から正へ又は正から負へのゼロクロスポイントにおいて前記振動変位が正か負かによって検出して、位相差が180度となるように前記コイルに印加される第1電圧の周波数を増減させて該方向においては共振振動させるようにし、前記第1、第2の電磁石の他方のコイルに印加される第2電圧は、前記一方の電磁石のコイルに印加された第1電圧とは所定値の位相差を持たせるようにしたことを特徴とする楕円振動フィーダの駆動制御方法によって解決される。
【0006】
又はトラフを水平方向に振動可能に支持する第1ばねと、前記トラフを垂直方向に振動可能に支持する第2ばねと、前記トラフを水平方向に加振する第1電磁石と、前記トラフを垂直方向に加振する第2電磁石とを備えた楕円振動フィーダの駆動制御装置において、前記第1、第2電磁石の一方のコイルに印加される第1電圧と、前記トラフの該一方の電磁石が加振する方向の前記トラフの振動変位との位相の進み又は遅れを前記電圧の負から正へ又は正から負へのゼロクロスポイントにおいて前記振動変位が正か負かによって検出する位相差検出器を設け、該位相差検出器の検出位相差が180度となるように前記コイルに印加される第1電圧の周波数を増減させる可変周波数電源を設け、前記方向においては共振振動させるようにし、前記第1、第2の電磁石の他方のコイルに印加される第2電圧は、前記一方の電磁石のコイルに印加された第1電圧とは所定値の位相差を持たせる位相差検出手段を設けたことを特徴とする楕円振動フィーダの駆動制御装置によって解決される。
【0007】
又は、トラフを水平方向に振動可能に支持する第1板ばねと、前記トラフを垂直方向に振動可能に支持する第2板ばねと、前記トラフを水平方向に加振する前記第1板ばねに貼着される第1圧電素子と、前記トラフを垂直方向に加振する前記第2板ばねに貼着される第2圧電素子とを備えた楕円振動フィーダの駆動制御方法において、前記第1、第2圧電素子の一方に印加される第1電圧と、前記トラフの該一方の圧電素子が加振する方向の前記トラフの振動変位との位相の進み又は遅れを検出して、位相差が90度となるように前記圧電素子に印加される第1電圧の周波数を増減させて該方向においては共振振動させるようにし、前記第1、第2の圧電素子の他方の圧電素子に印加される第2電圧は、前記一方の圧電素子に印加された第1電圧による振動変位と、前記第2電圧による振動変位との位相差が所定値を取るように、前記第1電圧と前記第2電圧との間に位相差を持たせるようにしたことを特徴とする楕円振動フィーダの駆動制御方法によって解決される。
【0008】
又はトラフを水平方向に振動可能に支持する第1板ばねと、前記トラフを垂直方向に振動可能に支持する第2板ばねと、前記第1板ばねに貼着される第1圧電素子と、前記第2板ばねに貼着される第2圧電素子と、を備えた楕円振動フィーダの制御装置において、前記第1、第2圧電素子の一方に印加される第1電圧と、前記トラフの該一方の圧電素子が加振する方向の前記トラフの振動変位との位相の進み又は遅れを検出して、位相差が90度となるように前記圧電素子に印加される第1電圧の周波数を増減させる可変周波数電源を設け、前記方向においては共振振動させるようにし、前記第1、第2の圧電素子の他方の圧電素子に印加される第2電圧は、前記一方の圧電素子に印加された第1電圧による振動変位と、前記第2電圧による振動変位との位相差を検出する位相差検出手段を設け、該検出手段が検出する位相差が所定値を取るように、前記第1電圧と前記第2電圧との間に位相差を持たせるようにしたことを特徴とする楕円振動フィーダの駆動制御装置によって解決される。
【0009】
以上の構成により、共振点追尾が確実に行なわれて第1方向、例えば水平方向にはトラフをいかなる外乱があったとしても常に共振状態で振動させることができ、またこの水平振動に対して垂直方向には最適な位相差角を持って振動させることができる。
【0010】
【発明の実施の形態】
次に本発明の実施の形態は従来の楕円振動フィーダに適用される。これら電磁石5、9に相互に所定の後述するように位相差を持って電圧が加えられると、垂直方向及び水平方向にこの位相差を持って電流が流れ、これにより、公知のようにトラフ8が楕円振動を行なう。
【0011】
垂直に伸びる板ばね2、3がトラフ8の水平方向成分の共振周波数を決定し、また水平に配設された板ばね6、7によって垂直方向の共振周波数が決定される。本発明の実施の形態においては水平方向の共振周波数にほゞ一致するように、水平方向加振力用電磁石5に電圧が加えられるのであるが、垂直方向加振用の電磁石9には所定の位相差を持って同周波数の電圧が加えられ、かつ、また共振点からは、ずれた周波数で駆動されることになる。
【0012】
図1は以上の楕円振動フィーダの駆動制御回路を示すが、楕円振動フィーダ自体は模式化して示されており、トラフ8は上述したように水平振動用板ばね2、3及び垂直振動用板ばね6、7により、地上に対し支持されている。図9においては図示しなかったが、垂直振動用の板ばね6、7の何れか一つの一端部に近接して、垂直方向振動測定用のピックアップ58が設けられている。また垂直に配設された水平方向振動用板ばね2又は3にも近接して、水平方向振動検出用のピックアップ40が配設されている。このピックアップ40は電線路W1 を介して水平用センサアンプ43に接続され、この出力は共振点追尾制御回路37及びA/D変換器51に接続されている。
【0013】
共振点追尾制御回路37の詳細は図2において示されるが、その出力はPWM制御回路54に供給され、更にその出力はパワーアンプ42で増巾されて、水平用の電磁コイル5に供給される。本実施の形態では水平方向の振巾が定振巾制御され、この所望の水平振巾を指令する水平指令振巾回路52が設けられ、この出力はPI(Proportional Integral)制御回路(比例積分制御回路)53に供給され、この出力は上述のPWM制御回路54に供給される。一方、垂直振動駆動用のブロックに属する位相差制御回路56には電線路W4 を介して、共振点追尾制御回路37の出力が供給される。これには更に上述の垂直振動検出用ピックアップ58の出力が垂直用センサアンプ59を介して供給されており、またこのセンサアンプ59の出力はA/D変換器62を介して同じく垂直の振巾を定振巾制御するPI制御回路61に接続される。これには垂直振巾指令回路60が接続され、更にこの制御回路61の出力はPWM制御回路63に供給される。位相差制御回路56は垂直用コイル32に所定の位相差を持った電圧を供給するための回路である。つまり、位相差指令回路57の出力は位相差制御回路56に供給されており、垂直振動がピックアップ58により検出され、これが位相差制御回路56に供給されているのであるが、この機械的な振動と、共振点追尾制御回路37から供給される電圧との位相差が位相差指令回路57の出力と比較して機械振動で所定の位相差角(例えば60度)を与えるような位相差の電圧をPWM制御回路63に供給している。この制御回路63の出力はパワーアンプ64を介して垂直用コイル32に供給される。この電圧の位相差θは垂直振動系の共振周波数が水平振動系のそれとはどれだけ離れているかによって決まるもので−90度から+90度の範囲で変わるものである。
【0014】
図2は図1における共振点追尾制御回路37の詳細を示すものであるが、主として可変周波数電源40、位相検出回路41およびメモリ45からなっている。可変周波数電源40には交流電源8にスイッチSを介して接続されており、この出力は増巾器42を介して電磁石21の電磁コイル22に接続されている。また図5におけるピックアップ40の出力は電線路W1 を介して増巾器43に接続される。この増巾出力は位相検出回路41に供給される。この位相検出回路41には、更に可変周波数電源40の出力が電線路W3 を介して供給されており、この位相検出出力が可変周波数電源40に接続されている。これは例えばインバータであってよい。
【0015】
また本発明の実施の形態による位相検出回路41は図4に示されるような方法で検出を行う。これは以下の作用において詳細を説明する。
【0016】
更に本発明の実施の形態によれば、可変周波数電源45は不揮発性のメモリ45に接続されている。
【0017】
以上、本発明の実施の形態の構成について説明したが、次にこの作用について説明する。
【0018】
スイッチSを閉じると交流電源38が可変周波数電源40に接続され、駆動状態となる。この出力電圧はPWM制御回路54及び増巾器42を介して電磁石の電磁コイルに供給される。これにより、本発明の楕円振動フィーダのトラフ10は水平方向の振動力を与えられる。
【0019】
ピックアップ40はこの水平方向の振動変位を検出し、増巾器43により増巾されて、位相検出回路41に加えられる。他方、これにはこの時の電磁コイルに印加されている電圧が供給されている。
【0020】
図4Aはこの印加電圧Vの時間的変化を示すものであるが、この電磁コイルにより、一時遅れが生じ、これに流れる電流Iは図4Bに示すように変化する。この電流により、電磁石22とトラフ8との間に交番磁気吸引力が発生し、トラフ8は水平方向の振動変位を与えられているのであるが、この振動変位が図4Cに示すように、コイルにかかる電圧Vと90度遅れている場合にはすなわちコイル電圧Vが正から負に変わるゼロクロスポイントにおいて振動変位S1 が正であれば図3に示すように、共振点ω0 (角周波数)では位相差φは90度であるので、ω0 よりは小さく周波数を上昇させるべきであると位相検出回路41で判断して可変周波数電源40の出力周波数を上昇させる。これがPWM制御回路54を介して増巾器12で増巾されて電磁石21のコイルに流され、より周波数の高い電流でトラフ8を振動させる。共振点ω0 に前回より近づいたことにより、振巾は上昇する。可変周波数電源40の出力周波数が更に高くなってついにω0 を越えて、これより高くなると図4A、Dに示すように振動変位S2 とコイル電圧Vとの関係は位相差で270度となる。
【0021】
図3において力の角周波数ωと振動変位との位相差φの関係から明らかなように共振点ω0 を通過したので可変周波数電源40の出力周波数を減少させる。なお、C1 、C2 、C3 は板ばねの粘性係数であり、C3 >C2 >C1 である。
【0022】
なお、C1 、C2 、C3 は板ばねの粘性係数であり、これを係数として速度に比例した反力を加えるものであるが、更にトラフ8の空気中における振動であれば当然、小さいけれど空気の抵抗も加わる。図3では水平方向の振動系の共振周波数がω0 として力と振動変位の位相差が90度であることを示しているが、垂直振動系においてはその共振周波数がω0 ’であれば、周波数ω0 で駆動すると図3から明らかなように力と変位との位相差は30度になり、これでは水平振動系とは60度の位相差であるので、最適値とされるが、通常はこのような位相差になるとは限らず、この角周波数ω0 より更に小さい共振周波数になる場合もあれば、ω0 ’より更に高い周波数に共振点が置かれる場合もある。いずれにしても力は電流の位相と同じであり、電磁コイルは誘導負荷であるので電圧と電流の位相差は90度である。従って上述したように電圧と振動変位との位相差が180度となった場合に共振周波数で駆動されていることになるのであるが、電流と電圧とは90度位相差がずれているので水平振動系の共振点ω0 より更に離れた場合、更に低い場合には電圧が正から負、又は負から正へのゼロクロスポイントにおいて振動変位の極性が正から負に変わることは明らかである。本駆動制御方法では、このゼロクロスポイントにおいて、振動変位の正、負を検出して共振追尾をしているのである。
【0023】
以上のようにして可変周波数電源40の出力周波数の増減を行って、ついにはこの振動フィーダは水平方向に共振周波数で駆動するようになる。
【0024】
以上のようにして水平振動系は共振振動を行なうのであるが、共振点追尾制御回路37の出力は電線路W4 を介して位相差制御回路56に供給されており、ここでは垂直方向の振動を検出するピックアップ58の出力を受け、位相差指令57の指令に基づいてこの位相差を生じさせるような電圧を発生し、PWM制御回路63に供給する。これは垂直振巾指令回路60及びこの出力に基づくPI制御回路61からの出力を受けて定振巾を与えるための電圧をパワーアンプ4で増巾された後、垂直用コイルに供給する。よって垂直方向には位相差指令回路57で設定された位相差でトラフ8を垂直方向に振動させる。よってトラフ8は所望の楕円振動を行なうことができる。
【0025】
振動フィーダの駆動を停止させるべくスイッチSを開くと可変周波数電源40からの出力はなくなり、トラフ8の駆動は停止する。なお定常的な駆動中に、不揮発性のメモリ45に可変周波数電源40の出力周波数が記憶されている。
【0026】
振動フィーダを再び駆動開始させるべく、スイッチSを閉じるとメモリ45でこの時記憶されている共振周波数を出力すべく可変周波数電源40が駆動される。従って振動フィーダのトラフ8は最初から水平方向に共振周波数で駆動される。従って強制振動から共振周波数に移るときのショックがなくなり、また電源容量を小とすることができる。
【0027】
以下、駆動停止、駆動開始を繰り返すごとに、停止ごとにメモリ45の内容が書き換えられるのであるが、1か月単位、1年単位では振動フィーダの共振周波数が変動する。したがってその都度、共振周波数を追尾制御していたのでは強制振動から共振振動に移るために多くの電流を流さねばならないのであるが、年単位で強制振動に移る程、共振周波数の変動が大きくとも前回の共振周波数で駆動を開始することができるので、常に振動フィーダをショックなく電源容量を小として駆動することができる。
【0028】
図5は本発明の第2の実施の形態による振動フィーダを示すが従来例と同一の部分に関しては同一の符号を付し、その詳細な説明は省略する。すなわち、本実施の形態によれば、水平方向用及び垂直方向用の電磁石5、9は省略されている。そのかわりに垂直駆動用の板ばね6、7の上表面に圧電素子6a、7aが貼着されている。また水平方向加振用の板ばね2、3の前表面に圧電素子2a、3aが貼着されている。
【0029】
図6は第2の実施形態の振動フィーダに対する駆動制御回路を示すが、第1の実施の形態に対応する部分には同一の符号を付し、その詳細な説明は省略する。すなわち図6においては上述の振動フィーダは概念的に示されているが、水平に延在する板ばね6、7の振動変位がセンサ40’により検出され、増巾器43で増巾されて、A/D変換器90に供給され、ここでアナログ−デジタル変換されて共振点追尾制御回路37’に供給される。またこの制御回路37’のデジタル出力は波形発生装置81に供給される。これには第1の実施の形態と同じPI制御回路53のデジタル出力が供給される。すなわち共振点追尾制御回路37’から周波数情報を受け、PI制御回路53からは振巾情報を受ける。波形発生装置81はこれら周波数情報及び振巾情報を受けて目標とする周波数及び振巾に向かうデジタル出力を発生し、これがD/A変換器82に供給され、デジタル−アナログ変換されて増巾器42により増巾され、振動フィーダの垂直に延在する板ばね2、3に貼着された圧電素子2a、3aに印加される。
【0030】
同様に垂直振動用の板ばね6、7に貼着されるジルコンサン鉛6a、7aの駆動により、曲げ運動を行なう板ばね6、7の振動変位はセンサ58’により検出され、この出力はこの増巾器59により増巾され、A/D変換器62によりアナログデジタル変換されてPI制御回路61に供給されると共にA/D変換器83によりアナログ−デジタル変換されて位相差制御回路56’に供給される。
【0031】
本発明の第2の実施の形態は以上のように構成されるが次にその作用について説明する。
【0032】
振動フィーダは垂直振動用板ばね6、7及び水平振動用板ばね2、3に貼着された圧電素子6a、7a、2a、3aの伸縮運動により、トラフ8は楕円振動を行なうのであるが、垂直振動変位はセンサ40’に検出され、増巾器43でこの出力は増巾されてA/D変換器90でアナログ−デジタル変換され、共振点追尾制御回路37’における位相検出回路41’に供給される。これには可変周波数電源の40’のデジタル出力が供給されており、電圧と振動変位との間の位相差を検出し、この位相差に応じて可変周波数電源40’から出力する周波数を増減させる。このデジタル出力は波形発生装置81に供給され、この時の周波数を表すデジタル出力が供給されており、他方、PI制御回路53からは所定の水平振巾に向かう振巾のデジタル出力が供給されている。これにより波形発生装置81からは共振周波数及び所定の振巾に向かうデジタル出力がD/A変換器82に供給され、これはデジタル−アナログ変換されて、増巾器42に供給される。この増巾器出力は圧電素子2a、3aに供給され、これらの伸縮運動により、板ばね2、3が共に曲げ運動し、トラフ8を水平振動させる。また、垂直振動用の板ばね6、7の曲げ運動はセンサ58’により、検出され、この出力は増巾器59で増巾されてA/D変換器62及び83によりアナログ−デジタル変換されてそれぞれPI制御回路61及び位相差制御回路56’に供給される。位相差制御回路56’には更に位相差指令57’がデジタル値として供給されており、これと、この時のA/D変換器83によりデジタル変換された垂直振動変位のデジタル値が比較されて、位相差指令回路57’からの指令値とからのずれに応じて位相差制御56’からは共振点追尾制御回路37’からのデジタル出力を進相するか遅相させるかして波形発生装置84に供給する。これが更に垂直振巾指令回路60の指令値に近づく振巾情報をデジタル値で波形発生装置84に供給する。よってこの装置84からは所定の振動変位の位相差を得るべく波形のデジタル値がD/A変換器85に供給され、デジタル−アナログ変換され正弦波形の電圧に変換されてこれが増巾器64で増巾されて、圧電素子hに印加する。
【0033】
図8は以上の駆動回路の作用を示すタイムチャートであるが、圧電素子2a、3aに加わる電圧は図Aで示されており、正弦的に変化する。これに対し、水平方向の振動変位S1 は図示するように位相が同一であるとすれば、第1の実施の形態のようにコイルに電流を与える場合は一時遅れがあるが、この場合には遅れなく、また、共振状態においては圧電素子電圧Vと振動変位とは90度の位相差を有しているので、周波数を増大させて90度の位相差になるべく、すなわち、共振周波数に達するべく上述のように制御される。また図8Cに示されるように圧電素子電圧Vと180度位相差があれば共振点より90度位相が進んでいることにより周波数を減少させる。よって共振周波数に近づける。以上のようにして第1の実施の形態と同様にして振動フィーダは水平方向には共振周波数で駆動され、垂直方向の振動変位には水平振動変位とは所定の位相差を持つべく位相差の電圧が圧電素子6a、7aに印加されて同周波数で振動する。
【0034】
本発明の第2の実施の形態によれば、以上のような作用が行なわれるが、更に第1の実施の形態と違って第1、第2の電磁石を不要とし、トラフ8と基台との間には電磁石のみならず、これに関連する構成は一切省略されているので、非常に簡素化されている。また高周波を加えても抵抗が大きくならず、従って高周波駆動が可能であり、また消費電力が小さい。またトラフ8と基台との間には、何ら駆動手段及びこれに関連する構成が設けられていないので、水平振動用板ばね2、3及び垂直振動用板ばね6、7の上側可動フレーム(トラフ側)、下側可動フレーム(基台)への取り付けが簡単に行なうことができる。
【0035】
以上、本発明の実施の形態について説明したが、勿論、本発明はこれらに限定されることなく、本発明の技術的思想に基づいて種々の変形が可能である。
【0036】
例えば、以上の第2の実施の形態においては板ばね2、3、6、7の片面に、圧電素子を貼着したが、これら板ばねの両面に圧電素子を貼着するようにしてもよい。なお、両面に取り付ける場合においては片面が延び運動する場合には他方が縮運動しなければならないのでこれらの極性は変更するものとする。
【0037】
また、以上の実施形態では垂直方向及び水平方向に定振巾制御を行なうようにしたが、これを省略して電圧の大きさを一定とする制御を行なってもよい。この時には多少の振巾変位があるがこれを許容する場合には可能である。
【0038】
また以上の実施形態では共振点追尾制御回路37にメモリ45を用いて駆動停止毎にその時の共振周波数を記憶するようにしたが、多少の電源容量の増大やショックを許容するならばこれを省略することもできる。
【0039】
図11は上記第2の実施の形態の第1の変形例を示すが、対応する部分については同一の符号を付し、その詳細な説明は省略する。
【0040】
すなわち本変形例では、同様な直線的なトラフ8を備えているが、この底面に固定された板ばね取付ブロック8aに垂直に延在する板ばね2、3の上端部が固定されており、下方ブロック32’にその下端部が固定されている。そして、これら板ばね2、3の両面に圧電素子2a、2b及び3a、3bが貼着されている。そして、下方ブロック32’とベースブロック33’との間に何枚か重ねられた圧電素子36’、36’が介在させられている。全体は防振ゴム34’、34’により床上に支持されている。本変形例においては、上述したように両面に圧電素子を取りつけられているが、これらの極性は逆とされており、また重ね合わせた圧電素子36’、36’は板ばねに貼着されていないが、これらは板ばねと圧電素子との両方の機能を有するものである。従って本願の特許請求の範囲におけるばね又は板ばねはこの圧電素子36’、36’がその機能も有するものと解釈する。
【0041】
図12は他変形例を示すものであるが、トラフ8と上方板ばね取付ブロック100との間にサンドイッチ状に圧電素子101が重ね配設されており、上方取付ブロック100には板ばね2、3の上端部が固定され、この下端部は下方ブロック102に固定されている。その全体は防振ゴム104、104によって支持されている。本変形例においても圧電素子101は板ばねを介在させていないが、この圧電素子自体が板ばねの働きをするので、同様に本願の特許請求の範囲の板ばねを含むものと解釈する。
【0042】
【発明の効果】
以上述べたように本発明の楕円振動フィーダの駆動制御方法及び装置によれば、トラフを一方の方向、例えば水平方向に常に共振状態で駆動させることができ、またこれと所定の位相差を持った電圧を第2の電磁石又は第2の圧電素子に加えることにより、トラフが所望の楕円振動を行なうことができる。
【図面の簡単な説明】
【図1】従来例の振動フィーダに適用される本発明の第1の実施形態による駆動制御回路のブロック図である。
【図2】同駆動制御回路における共振点追尾制御回路の詳細図である。
【図3】同作用を説明するためのチャートである。
【図4】更に同作用を説明するためのチャートである。
【図5】本発明の第2の実施の形態による振動フィーダの正面図である。
【図6】同振動パーツフィーダの駆動制御回路のブロック図である。
【図7】同ブロック図における一部の詳細なブロック図である。
【図8】同制御回路の作用を示すタイムチャートで、Aは圧電素子に加わる電圧の時間的変化で、Bは水平振動変位S1 の時間的変化、Cは他の水平振動変位S2 の時間的変化である。
【図9】従来例の振動フィーダの側面図である。
【図10】同駆動部(トラック8を取り除いた)の平面図である。
【図11】本発明の第2の実施の形態の第1の変形例を示す振動フィーダの側面図である。
【図12】同第2変形例を示す振動フィーダの側面図である。
【符号の説明】
2 板ばね
2a 圧電素子
3 板ばね
3a 圧電素子
5 板ばね
6 板ばね
6a 圧電素子
6b 圧電素子
7 板ばね
10 ボウル
15a 板ばね
15d 板ばね
16’ 圧電素子
17a’ 圧電素子
17b’ 圧電素子
22 コイル
32 コイル
37 共振点追尾制御回路
37’ 共振点追尾制御回路
56 位相差制御回路
Claims (6)
- トラフを水平方向に振動可能に支持する第1ばねと、前記トラフを垂直方向に振動可能に支持する第2ばねと、前記トラフを水平方向に加振する第1電磁石と、前記トラフを垂直方向に加振する第2電磁石とを備えた楕円振動フィーダの駆動制御方法において、
前記第1、第2電磁石の一方のコイルに印加される第1電圧と、前記トラフの該一方の電磁石が加振する方向の前記トラフの振動変位との位相の進み又は遅れを前記電圧の負から正へ又は正から負へのゼロクロスポイントにおいて前記振動変位が正か負かによって検出して、位相差が180度となるように前記コイルに印加される第1電圧の周波数を増減させて該方向においては共振振動させるようにし、前記第1、第2の電磁石の他方のコイルに印加される第2電圧は、前記一方の電磁石のコイルに印加された第1電圧とは所定値の位相差を持たせるようにしたことを特徴とする楕円振動フィーダの駆動制御方法。 - 請求項1に記載の楕円振動フィーダの駆動制御方法であって、
定常的な駆動中の前記周波数を記憶し、再駆動時には該記憶した前記周波数で駆動開始させるようにしたことを特徴とする楕円振動フィーダの駆動制御方法。 - 請求項2に記載の楕円振動フィーダの駆動制御方法であって、
前記記憶される前記駆動中の前記周波数は、駆動停止毎に書き変えられるようにしたことを特徴とする楕円振動フィーダの駆動制御方法。 - トラフを水平方向に振動可能に支持する第1ばねと、前記トラフを垂直方向に振動可能に支持する第2ばねと、前記トラフを水平方向に加振する第1電磁石と、前記トラフを垂直方向に加振する第2電磁石とを備えた楕円振動フィーダの駆動制御装置において、
前記第1、第2電磁石の一方のコイルに印加される第1電圧と、前記トラフの該一方の電磁石が加振する方向の前記トラフの振動変位との位相の進み又は遅れを前記電圧の負から正へ又は正から負へのゼロクロスポイントにおいて前記振動変位が正か負かによって検出する位相差検出器を設け、該位相差検出器の検出位相差が180度となるように前記コイルに印加される第1電圧の周波数を増減させる可変周波数電源を設け、前記方向においては共振振動させるようにし、前記第1、第2の電磁石の他方のコイルに印加される第2電圧は、前記一方の電磁石のコイルに印加された第1電圧とは所定値の位相差を持たせる位相差検出手段を設けたことを特徴とする楕円振動フィーダの駆動制御装置。 - 請求項4に記載の楕円振動フィーダの駆動制御装置であって、
定常的な駆動中の前記可変周波数電源の前記周波数をメモリに記憶し、再駆動時には該記憶した前記周波数で駆動開始させるようにしたことを特徴とする楕円振動フィーダの駆動制御装置。 - 請求項5に記載の楕円振動フィーダの駆動制御装置であって、
前記記憶される前記駆動中の前記周波数は、駆動停止毎に書き変えられるようにしたことを特徴とする楕円振動フィーダの駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP36320997A JP4211073B2 (ja) | 1997-12-15 | 1997-12-15 | 楕円振動フィーダの駆動制御方法及びその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP36320997A JP4211073B2 (ja) | 1997-12-15 | 1997-12-15 | 楕円振動フィーダの駆動制御方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11171320A JPH11171320A (ja) | 1999-06-29 |
| JP4211073B2 true JP4211073B2 (ja) | 2009-01-21 |
Family
ID=18478771
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP36320997A Expired - Fee Related JP4211073B2 (ja) | 1997-12-15 | 1997-12-15 | 楕円振動フィーダの駆動制御方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4211073B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103648930B (zh) * | 2011-07-08 | 2015-09-23 | 昕芙旎雅有限公司 | 振动装置、物品输送装置及物品区分装置 |
| JP6182827B2 (ja) * | 2011-12-12 | 2017-08-23 | シンフォニアテクノロジー株式会社 | 振動装置および物品移動装置 |
| KR101977429B1 (ko) * | 2011-11-07 | 2019-05-10 | 엔티엔 가부시키가이샤 | 진동식 부품 반송 장치 |
| JP2013095596A (ja) * | 2011-11-07 | 2013-05-20 | Ntn Corp | 振動式部品搬送装置 |
| JP6081695B2 (ja) * | 2011-11-07 | 2017-02-15 | Ntn株式会社 | 振動式部品搬送装置 |
| JP2016160099A (ja) * | 2015-03-05 | 2016-09-05 | シンフォニアテクノロジー株式会社 | 振動フィーダ用制御装置及び振動フィーダ |
-
1997
- 1997-12-15 JP JP36320997A patent/JP4211073B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11171320A (ja) | 1999-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6965177B2 (en) | Pulse drive of resonant MEMS devices | |
| JP5037767B2 (ja) | 振動型アクチュエータの制御装置 | |
| JP4211073B2 (ja) | 楕円振動フィーダの駆動制御方法及びその装置 | |
| JP4814948B2 (ja) | 振動型アクチュエータの制御装置 | |
| US7154208B2 (en) | Control apparatus for vibration type actuator | |
| US7061156B2 (en) | Control apparatus for vibration type actuator | |
| JP4794901B2 (ja) | 振動型アクチュエータの駆動システムおよびその駆動方法 | |
| JP4211072B2 (ja) | 楕円振動パーツフィーダの駆動制御方法及びその装置 | |
| JP3264580B2 (ja) | 角速度検出装置 | |
| JP2008236820A (ja) | 駆動装置 | |
| JP3912562B2 (ja) | 楕円振動パーツフィーダ | |
| JP2003348888A (ja) | リニアアクチュエータの駆動制御装置およびそれを用いたリニアアクチュエータ | |
| JP4061685B2 (ja) | 楕円振動フィーダの駆動制御方法及び装置 | |
| JPH0520473Y2 (ja) | ||
| JP2893917B2 (ja) | 振動機の駆動制御装置 | |
| JP4078694B2 (ja) | 楕円振動パーツフィーダの駆動制御方法及び楕円振動パーツフィーダ | |
| JP3752701B2 (ja) | 自励振動型振動制御装置 | |
| JP3944757B2 (ja) | 楕円振動パーツフィーダ | |
| JPH11116029A (ja) | 電磁振動フィーダの駆動制御方法及びその装置 | |
| JPH03256579A (ja) | 超音波モータ | |
| JPH11193124A (ja) | 楕円振動フィーダの駆動制御方法及び装置 | |
| JPH11199027A (ja) | 楕円振動機における搬送速度制御方法 | |
| JPH11118588A (ja) | 楕円振動パーツフィーダの振動検出装置 | |
| JPH11180529A (ja) | 楕円振動パーツフィーダの駆動制御方法 | |
| JP3823401B2 (ja) | 自励振動型振動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070927 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20071031 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080715 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080916 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081007 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081020 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111107 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111107 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121107 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121107 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131107 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |