JP4319928B2 - 車両状態検知システムおよび車両状態検知方法 - Google Patents
車両状態検知システムおよび車両状態検知方法 Download PDFInfo
- Publication number
- JP4319928B2 JP4319928B2 JP2004065922A JP2004065922A JP4319928B2 JP 4319928 B2 JP4319928 B2 JP 4319928B2 JP 2004065922 A JP2004065922 A JP 2004065922A JP 2004065922 A JP2004065922 A JP 2004065922A JP 4319928 B2 JP4319928 B2 JP 4319928B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image data
- flow
- determined
- state detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/103—Side slip angle of vehicle body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
本発明の一実施形態を適用した車両状態検知システムのブロック構成を図1に示す。この図に示されるように、車両状態検知システムは、車載カメラ1、車輪速度センサ2および車両状態検出用のECU3を有して構成されている。
d・γ+Vβ=Vy_flow
この数式は、車両の横すべりによる横移動速度Vβと、重心周りの回転角速度による前方注視点の横移動速度d・γとの総和が画像で捉えた前方注視点Pのオプティカルフローの横方向成分として現れることを意味している。換言すれば、オプティカルフローの横方向速度成分は、車両の横滑り運動の回転運動の拘束関係を示すことになる。
ρ=V/γ
Vβ=(1−KV2)Lrγ
=α・d・γ
ただし、α=(1−KV2)Lr/dである。
上記実施形態では、車速を求めるために車輪速度センサ2からの検出信号を用いているが、いわゆる車速センサからの検出信号によって車速を求めても構わない。また、車載カメラ1により車両前方の画像を撮影するものとして説明したが、必ずしも前方でなくてもよく、車両側から車外の状況を撮影し、その画像データ中に車両の横方向の並進運動および重心周りの回転運動が含まれるものであればどの方向であっても構わない。
Claims (6)
- (a)自車両に搭載され、該自車両の外の状況の画像を撮影すると共に、その画像データを出力する画像認識装置(1)と、
(b)前記自車両の車速に応じた検出信号を出力する車速検出手段(2)と、
(c)画像認識手段(1)が撮影した前記自車両の走行中における車外の画像の画像データを受け取り、該画像データからその画像中の任意の注視点のオプティカルフローの横方向速度Vy_frowを前記自車両の走行状態を示す物理量を含むベクトルとして求め、
(d)このオプティカルフローの横方向速度Vy_frowおよび車速検出手段(2)からの車速に応じた検出信号とに基づいて、前記注視点から見た前記自車両の動きとしての走行状態を判定する車両状態検出手段(3)と、を備えており、
(e)前記車両状態検出手段(3)は、前記走行状態として、車両の横方向における並進運動を示すスリップ角βおよび車両の重心周りの回転運動を示すヨーレートγを判定し、
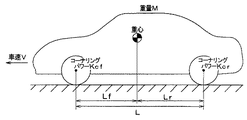
(f)前記車両状態検知手段(3)は、車両から注視点までの距離をd、車両質量をM、ホイールベースをL、車両重心と前輪軸との間の距離をLf、車両重心と後輪軸との間の距離をLr、後輪のタイヤコーナリングパワーをKcrとした場合に、[数1]により、前記スリップ角βを判定し、
(g)前記車両状態検知手段(3)は、車両から注視点までの距離をd、車両質量をM、ホイールベースをL、車両重心と前輪軸との間の距離をLf、車両重心と後輪軸との間の距離をLr、後輪のタイヤコーナリングパワーをKcrとした場合に、[数2]により、前記ヨーレートγを判定することを特徴とする車両状態検知システム。
- (a)車両における車速を求めるステップと、
(b)画像認識手段(1)が撮影した前記自車両の走行中における車外の画像の画像データを受け取り、該画像データからその画像中の任意の点のオプティカルフローの横方向速度Vy_frowを前記自車両の走行状態を示す物理量を含むベクトルとして求めるステップと、
(c)前記車速およびオプティカルフローの横方向速度Vy_frowに基づいて、前記注視点から見た前記自車両の動きとして走行状態を判定するステップと、を含んでおり、
(d)前記走行状態として、車両の横方向における並進運動を示すスリップ角βおよび車両の重心周りの回転運動を示すヨーレートγを判定し、
(e)前記走行状態を判定するステップでは、車両から注視点までの距離をd、車両質量をM、ホイールベースをL、車両重心と前輪軸との間の距離をLf、車両重心と後輪軸との間の距離をLr、後輪のタイヤコーナリングパワーをKcrとした場合に、[数3]により、前記スリップ角βを判定し、
(f)前記走行状態を判定するステップでは、車両から注視点までの距離をd、車両質量をM、ホイールベースをL、車両重心と前輪軸との間の距離をLf、車両重心と後輪軸との間の距離をLr、後輪のタイヤコーナリングパワーをKcrとした場合に、[数4]により、前記ヨーレートγを判定することを特徴とする車両状態検知方法。
- 前記車両状態検出手段(3)は、前記画像データ中における前記自車両の前後方向をX軸、左右方向をY軸、上下方向をZ軸としたとき、前記画像データ中における任意の注視点がY軸を移動した場合、前記自車両が横方向に並進移動したと判定し、前記画像データ中における任意の注視点がZ軸を中心として回転した場合、前記自車両が回転運動したと判定することを特徴とする請求項1に記載の車両状態検知システム。
- 前記車両状態検出手段(3)は、前記画像データ中のうち、前記自車両の前後方向において該自車両から遠い位置でのオプティカルフローの横方向速度Vy_frowが所定値より小さく、該自車両の左右方向でのオプティカルフローの横方向速度Vy_frowが所定値より大きい場合、該自車両が横方向に並進運動したと判定し、前記画像データのうち前記自車両の前方の位置および左右の位置でのオプティカルフローの横方向速度Vy_frowが所定値より大きい場合、該自車両が回転運動したと判定することを特徴とする請求項1に記載の車両状態検知システム。
- 前記走行状態を判定するテップでは、前記画像データ中における前記自車両の前後方向をX軸、左右方向をY軸、上下方向をZ軸としたとき、前記画像データ中における任意の注視点がY軸を移動した場合、前記自車両が横方向に並進移動したと判定し、前記画像データ中における任意の注視点がZ軸を中心として回転した場合、前記自車両が回転運動したと判定することを特徴とする請求項2に記載の車両状態検知方法。
- 前記走行状態を判定するステップでは、前記画像データ中のうち、前記自車両の前後方向において該自車両から遠い位置でのオプティカルフローの横方向速度Vy_frowが所定値より小さく、該自車両の左右方向でのオプティカルフローの横方向速度Vy_frowが所定値より大きい場合、該自車両が横方向に並進運動したと判定し、前記画像データのうち前記自車両の前方の位置および左右の位置でのオプティカルフローの横方向速度Vy_frowが所定値より大きい場合、該自車両が回転運動したと判定することを特徴とする請求項2に記載の車両状態検知方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004065922A JP4319928B2 (ja) | 2004-03-09 | 2004-03-09 | 車両状態検知システムおよび車両状態検知方法 |
| DE102005009814.2A DE102005009814B4 (de) | 2004-03-09 | 2005-03-03 | Fahrzeugzustands-Erfassungssystem und -verfahren |
| FR0502315A FR2867567B1 (fr) | 2004-03-09 | 2005-03-08 | Systeme et procede de detection de l'etat d'un vehicule |
| US11/075,180 US7477760B2 (en) | 2004-03-09 | 2005-03-08 | Vehicle state sensing system and vehicle state sensing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004065922A JP4319928B2 (ja) | 2004-03-09 | 2004-03-09 | 車両状態検知システムおよび車両状態検知方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005254861A JP2005254861A (ja) | 2005-09-22 |
| JP4319928B2 true JP4319928B2 (ja) | 2009-08-26 |
Family
ID=34909379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004065922A Expired - Fee Related JP4319928B2 (ja) | 2004-03-09 | 2004-03-09 | 車両状態検知システムおよび車両状態検知方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7477760B2 (ja) |
| JP (1) | JP4319928B2 (ja) |
| DE (1) | DE102005009814B4 (ja) |
| FR (1) | FR2867567B1 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100763234B1 (ko) * | 2004-06-11 | 2007-10-04 | 삼성전자주식회사 | 주행 상태를 감지하는 시스템 및 방법 |
| US8666661B2 (en) * | 2006-03-31 | 2014-03-04 | The Boeing Company | Video navigation |
| JP4882761B2 (ja) * | 2007-01-25 | 2012-02-22 | トヨタ自動車株式会社 | 車両用経路案内装置 |
| JP4905496B2 (ja) * | 2009-04-15 | 2012-03-28 | トヨタ自動車株式会社 | 物体検出装置 |
| EP2419881B1 (en) | 2009-04-15 | 2016-03-30 | Toyota Jidosha Kabushiki Kaisha | Object detection device |
| JP4788798B2 (ja) * | 2009-04-23 | 2011-10-05 | トヨタ自動車株式会社 | 物体検出装置 |
| EP2425274B1 (en) * | 2009-04-29 | 2017-10-18 | Koninklijke Philips N.V. | Laser diode based self-mixing sensor for a vehicle electronic stability program |
| DE102009032314A1 (de) * | 2009-07-09 | 2011-01-13 | Wabco Gmbh | Verfahren zur korrekten Durchführung von autonomen Notbremsungen bei einem Straßenfahrzeug |
| EP2564776B1 (en) * | 2011-09-02 | 2019-08-28 | Volvo Car Corporation | Method, system and computer readable medium embodying a computer program product for determining a vehicle operator's expectation of a state of an object |
| JP2014071080A (ja) * | 2012-10-01 | 2014-04-21 | Denso Corp | 車両の移動方向検出装置、及びコンピュータプログラム |
| KR101582572B1 (ko) * | 2013-12-24 | 2016-01-11 | 엘지전자 주식회사 | 차량 운전 보조 장치 및 이를 구비한 차량 |
| CN105136121B (zh) * | 2015-09-15 | 2018-06-15 | 歌尔股份有限公司 | 确定工装状态的影像检测方法及系统 |
| CN105632245A (zh) * | 2016-03-14 | 2016-06-01 | 桂林航天工业学院 | 一种车辆靠近提醒装置及方法 |
| TWI629671B (zh) * | 2016-11-16 | 2018-07-11 | 英業達股份有限公司 | 安全警示裝置及具有安全警示裝置的穿戴裝置 |
| CN106482710B (zh) * | 2016-12-09 | 2019-04-05 | 山西省交通科学研究院 | 一种车载式公路隧道快速检测系统 |
| DE102017212175A1 (de) * | 2017-07-17 | 2019-01-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Ermitteln eines optischen Flusses anhand einer von einer Kamera eines Fahrzeugs aufgenommenen Bildsequenz |
| JP7147546B2 (ja) * | 2018-12-25 | 2022-10-05 | トヨタ自動車株式会社 | 車両のスリップ角推定装置 |
| DE102019111041A1 (de) * | 2019-04-29 | 2020-10-29 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zur Ermittlung eines Schätzwertes des Schwimmwinkels eines Fahrzeugs |
| DE102019127022A1 (de) * | 2019-10-08 | 2021-04-08 | Valeo Schalter Und Sensoren Gmbh | Bestimmen einer Gierrate eines Kraftfahrzeugs |
| DE102020106302A1 (de) | 2020-03-09 | 2021-09-09 | Zf Cv Systems Global Gmbh | Verfahren zum Ermitteln einer Objekt-Information zu einem Objekt in einer Fahrzeugumgebung, Steuereinheit und Fahrzeug |
| DE102020106304A1 (de) | 2020-03-09 | 2021-09-09 | Zf Cv Systems Global Gmbh | Verfahren zum Steuern eines Fahrzeuges auf einem Betriebshof, Fahrt- Steuereinheit und Fahrzeug |
| DE102020106301A1 (de) | 2020-03-09 | 2021-09-09 | Zf Cv Systems Global Gmbh | Verfahren zum Ermitteln einer Objekt-Information zu einem Objekt in einer Fahrzeugumgebung, Steuereinheit und Fahrzeug |
| GB2599380A (en) * | 2020-09-30 | 2022-04-06 | Roadmetric Ltd | Measuring vehicle speeds with an uncalibrated camera |
| DE102021208144A1 (de) | 2021-07-28 | 2023-02-02 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Eigenbewegungsschätzung und Positionsbestimmung eines Fahrzeugs |
| CN115214652A (zh) * | 2022-06-01 | 2022-10-21 | 上海理工大学 | 一种人行横道处面向大货车的碰撞预警模型构建方法 |
| CN121487854A (zh) * | 2023-07-10 | 2026-02-06 | 日产自动车株式会社 | 车辆用制驱动力控制方法及控制装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5323152A (en) * | 1992-04-15 | 1994-06-21 | Sumitomo Electric Industries, Ltd. | Apparatus for detecting the position of a vehicle |
| JPH08205306A (ja) * | 1995-01-27 | 1996-08-09 | Fuji Heavy Ind Ltd | 車両の警報装置 |
| JP3184077B2 (ja) | 1995-11-08 | 2001-07-09 | ダイハツ工業株式会社 | 自動車の操舵検出機能付先行車検出装置 |
| JP3720117B2 (ja) | 1996-03-28 | 2005-11-24 | 富士重工業株式会社 | 車両の警報装置 |
| JP3990836B2 (ja) * | 1999-03-01 | 2007-10-17 | 矢崎総業株式会社 | 車両用周辺監視装置 |
| US6231066B1 (en) | 1999-03-03 | 2001-05-15 | Shimano Inc. | Active highback system for a snowboard boot |
| AU1793301A (en) | 1999-11-26 | 2001-06-04 | Mobileye, Inc. | System and method for estimating ego-motion of a moving vehicle using successiveimages recorded along the vehicle's path of motion |
| US6535114B1 (en) | 2000-03-22 | 2003-03-18 | Toyota Jidosha Kabushiki Kaisha | Method and apparatus for environment recognition |
| JP4624594B2 (ja) * | 2000-06-28 | 2011-02-02 | パナソニック株式会社 | 物体認識方法および物体認識装置 |
| TWI246665B (en) * | 2001-07-12 | 2006-01-01 | Ding-Jang Tzeng | Method for aiding the driving safety of road vehicle by monocular computer vision |
| US6840343B2 (en) * | 2002-10-16 | 2005-01-11 | Ford Global Technologies, Llc | Tire side slip angle control for an automotive vehicle using steering peak seeking actuators |
-
2004
- 2004-03-09 JP JP2004065922A patent/JP4319928B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-03 DE DE102005009814.2A patent/DE102005009814B4/de not_active Expired - Fee Related
- 2005-03-08 FR FR0502315A patent/FR2867567B1/fr active Active
- 2005-03-08 US US11/075,180 patent/US7477760B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102005009814B4 (de) | 2018-07-05 |
| FR2867567A1 (fr) | 2005-09-16 |
| US7477760B2 (en) | 2009-01-13 |
| FR2867567B1 (fr) | 2010-10-01 |
| JP2005254861A (ja) | 2005-09-22 |
| US20050201593A1 (en) | 2005-09-15 |
| DE102005009814A1 (de) | 2005-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4319928B2 (ja) | 車両状態検知システムおよび車両状態検知方法 | |
| JP6316411B2 (ja) | 画像認識装置及びその制御方法 | |
| JP4832489B2 (ja) | 車線判定装置 | |
| CN107074316A (zh) | 用于双轮机动车的信息提供装置以及流程 | |
| JP2015505759A (ja) | 車両の迫っている横転を検知するための方法 | |
| EP4071021B1 (en) | Rider assistance system and control method for rider assistance system | |
| JP2016505450A (ja) | 車両用のカメラシステム、車両用の車載カメラの画像の画像領域を制御するための方法および装置 | |
| JP6722400B2 (ja) | 車両の運転支援装置 | |
| CN105593776B (zh) | 车辆位置姿势角推定装置及车辆位置姿势角推定方法 | |
| WO2018229567A1 (ja) | 前方認識システムのための処理ユニット及び処理方法、前方認識システム、及び、モータサイクル | |
| JP5651642B2 (ja) | 物体位置検知装置 | |
| US20200167906A1 (en) | Imaging abnormality diagnosis device | |
| JPH1123291A (ja) | 車両用画像処理装置 | |
| US10442463B2 (en) | Method and device for ascertaining the steering angle of a one-track vehicle | |
| JP6595647B2 (ja) | 走行制御装置、車両および走行制御方法 | |
| CN115147787A (zh) | 图像处理装置以及图像处理方法、车辆用控制装置、存储介质 | |
| JP2008197722A (ja) | 顔追跡装置 | |
| WO2020090320A1 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| JP4419560B2 (ja) | 車両のレーン走行支援装置 | |
| JP4696539B2 (ja) | 車両の走行支援装置 | |
| JP2026002571A (ja) | 表示装置 | |
| JP5193148B2 (ja) | 車両用撮像装置 | |
| JP3296208B2 (ja) | カーブ曲率推定装置 | |
| JP2006151066A (ja) | 車両の走行支援装置 | |
| JP4325363B2 (ja) | 車両のレーン走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070320 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070510 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071226 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20080111 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20080201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090310 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090529 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120605 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4319928 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120605 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130605 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140605 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |