以下に本発明の実施の形態を説明するが、本発明の構成要件と、明細書または図面に記載の実施の形態との対応関係を例示すると、次のようになる。この記載は、本発明をサポートする実施の形態が、発明の詳細な説明に記載されていることを確認するためのものである。従って、発明の詳細な説明中には記載されているが、本発明の構成要件に対応する実施の形態として、ここには記載されていない実施の形態があったとしても、そのことは、その実施の形態が、その構成要件に対応するものではないことを意味するものではない。逆に、実施の形態が構成要件に対応するものとしてここに記載されていたとしても、そのことは、その実施の形態が、その構成要件以外の構成要件には対応しないものであることを意味するものでもない。
本発明の一側面の画像処理装置(例えば、図2の巡回型IP変換部111)は、第1に、インターレース方式の入力画像(例えば、画像I1)をプログレッシブ方式の出力画像(例えば、画像P2)に変換する画像処理装置であって、前記入力画像をプログレッシブ方式の中間画像(例えば、画像P1)に変換するIP変換手段(例えば、図2のIP変換部121)と、前記中間画像の画素の間隔より短い距離を最小単位とする前記入力画像の動きベクトル(例えば、動きベクトルV)を検出する動きベクトル検出手段(例えば、図2の動きベクトル検出部131)と、前記動きベクトルの垂直方向の成分である垂直動き量(例えば、垂直動き量VY)に基づいて、前記入力画像に画素が存在する位置にある第1のタイプの画素(例えば、タイプAの画素)に対する第1の巡回係数(例えば、巡回係数KA0)、および、前記入力画像に画素が存在しない位置にある第2のタイプの画素(例えば、タイプBの画素)に対する第2の巡回係数(例えば、巡回係数KB0)を設定する巡回係数設定手段(例えば、図2の巡回係数設定部133)と、前記動きベクトルに基づいて、過去の前記出力画像(例えば、画像P3)に対して動き補償を施した画像である動き補償画像(例えば、画像P4)を生成する動き補償手段(例えば、図2の動き補償部134)と、前記中間画像の前記第1のタイプの画素の画素値と前記動き補償画像の対応する位置にある画素の画素値とを前記第1の巡回係数を用いて重み付け加算し、前記中間画像の前記第2のタイプの画素の画素値と前記動き補償画像の対応する位置にある画素の画素値とを前記第2の巡回係数を用いて重み付け加算した画素値からなる前記出力画像を生成する出力画像生成手段(例えば、図2の積和演算部135)とを備える。
本発明の一側面の画像処理装置は、第2に、前記動きベクトルの信頼度を検出する信頼度検出手段(例えば、図5の動き分散差し引き量算出部181またはMCブロック差分差し引き量算出部182)と、前記動きベクトルの信頼度に基づいて、前記第1の巡回係数および前記第2の巡回係数を補正する補正手段(例えば、減算部183−1および183−3、または、減算部183−2および183−4)とをさらに備える。
本発明の一側面の画像処理方法またはプログラムは、インターレース方式の入力画像(例えば、画像I1)をプログレッシブ方式の出力画像(例えば、画像P2)に変換する画像処理方法、または、インターレース方式の入力画像(例えば、画像I1)をプログレッシブ方式の出力画像(例えば、画像P2)に変換する画像処理を、コンピュータに実行させるプログラムであって、前記入力画像をプログレッシブ方式の中間画像(例えば、画像P1)に変換し(例えば、図6のステップS1)、前記中間画像の画素の間隔より短い距離を最小単位とする前記入力画像および前記中間画像の動きベクトル(例えば、動きベクトルV)を検出し(例えば、図8のステップS21)、前記動きベクトルの垂直方向の成分である垂直動き量(例えば、垂直動き量VY)に基づいて、前記入力画像に画素が存在する位置にある第1のタイプの画素(例えば、タイプAの画素)に対する第1の巡回係数(例えば、巡回係数KA0)、および、前記入力画像に画素が存在しない位置にある第2のタイプの画素(例えば、タイプBの画素)に対する第2の巡回係数(例えば、巡回係数KB0)を設定し(例えば、図8のステップS23)、前記動きベクトルに基づいて、過去の前記出力画像(例えば、画像P3)に対して動き補償を施した画像である動き補償画像(例えば、画像P4)を生成し(例えば、図8のステップS28)、前記中間画像の前記第1のタイプの画素の画素値と前記動き補償画像の対応する位置にある画素の画素値とを前記第1の巡回係数を用いて重み付け加算し、前記中間画像の前記第2のタイプの画素の画素値と前記動き補償画像の対応する位置にある画素の画素値とを前記第2の巡回係数を用いて重み付け加算した画素値からなる前記出力画像を生成する(例えば、図8のステップS29)ステップとを含む。
以下、本発明の実施の形態について図を参照して説明する。
図1は、本発明を適用した画像変換装置101の一実施の形態を示すブロック図である。画像変換装置101は、巡回型IP変換部111、出力位相変換部112、自然画予測部113、人工画予測部114、自然画人工画判定部115、および、合成部116により構成される。また、巡回型IP変換部111は、IP変換部121および巡回型変換部122により構成される。
巡回型IP変換部111のIP変換部121および巡回型変換部122には、処理対象となるインターレース方式のSD(Standard Definition)画像が入力される。
IP変換部121は、所定の方法に基づいて、入力されたインターレース方式のSD画像(以下、入力画像とも称する)をプログレッシブ方式のSD画像(以下、中間画像とも称する)にIP変換し、IP変換したプログレッシブ方式のSD画像を巡回型変換部122に供給する。
巡回型変換部122は、入力画像と、1フレーム前に巡回型変換部122から出力されたプログレッシブ方式のSD画像(以下、出力画像とも称する)との間の動きベクトルを求める。巡回型変換部122は、入力画像の画素値と、求めた動きベクトルに基づいて、出力画像に動き補償を施した画像の画素値とを、巡回係数を用いて重み付け加算することにより、中間画像の画質を向上させる。巡回型変換部122は、中間画像をより高画質のプログレッシブ方式のSD画像である出力画像に変換し、出力画像を出力位相変換部112に供給する。なお、巡回係数は、中間画像の各画素について、変換前の入力画像において画素が存在する位置にあるか否か、動きベクトルの垂直方向の大きさ、および、動きベクトルの確からしさを表す信頼度確からしさに基づいて設定される。
出力位相変換部112は、巡回型変換部122から供給されるSD画像に対して、水平方向および垂直方向に補間を行うことにより、HD(High Definition)画像を生成する。出力位相変換部112は、そのHD画像を、自然画予測部113、人工画予測部114、および、自然画人工画判定部115に供給する。
自然画予測部113は、出力位相変換部112から供給されるHD画像から、そのHD画像のうちの自然画像を高品質にしたHD画像(以下、自然高品画像と称する)を予測する。具体的には、自然画予測部113は、HD画像の特徴に応じて、そのHD画像から求められる自然高品質画像の画素である注目画素を、自然画像の特徴に適したクラスに分類する。そして、自然画予測部113は、そのクラスに対応する、自然高品質画像を予測するための予測係数と、HD画像とを用いて演算することにより、出力位相変換部112から供給されたHD画像から、自然高品質画像を予測する。自然画予測部113は、その自然高品質画像を合成部116に供給する。
ここで、自然画像とは、後述する人工画像ではない画像のことであり、自然界に存在するものをそのまま撮像することにより得られる画像である。
人工画予測部114は、自然画予測部113と同様に、出力位相変換部112から供給されるHD画像から、そのHD画像のうちの人工画像を高品質にしたHD画像(以下、人工高品質画像と称する)を予測する。具体的には、人工画予測部114は、HD画像の特徴に応じて、そのHD画像から求められる人工高品質画像の画素である注目画素を、人工画像の特徴に適したクラスに分類する。そして、人工画予測部114は、そのクラスに対応する、人工高品質画像を予測するための予測係数と、HD画像とを用いて演算することにより、出力位相変換部112から供給されたHD画像から、人工高品質画像を予測する。人工画予測部114は、その人工高品質画像を合成部116に出力する。
ここで、人工画像とは、文字や単純な図形などの、階調が少なく位相情報であるエッジ位相情報がはっきりした、すなわち、平坦部分が多い人工的な画像である。換言すれば、人工画像は、文字や単純図形等の階調があまり無く、輪郭等の位相情報が支配的になっている画像である。
自然画人工画判定部115は、出力位相変換部112より供給されるHD画像の各画素について、人工画像に分類される領域、または、自然画像に分類される領域のいずれの領域に属するかを判定し、判定結果を人工画度として合成部116に出力する。すなわち、人工画度とは、人工画像と自然画像との中間に分類される領域において自然画像における人工画像の割合を0乃至1の値で示したものである。
合成部116は、自然画人工画判定部115より供給される判定結果に基づいて、自然画予測部113から供給される自然高品質画像の各画素の画素値と、人工画予測部114から供給される人工高品質画像の各画素の画素値とを人工画度に応じた割合で合成し、合成の結果得られるHD画像を出力する。
図2は、図1の巡回型IP変換部111の巡回型変換部122の機能的構成を詳細に示したブロック図である。巡回型変換部122は、動きベクトル検出部131、MCブロック差分検出部132、巡回係数設定部133、動き補償部134、積和演算部135、および、フレームメモリ136により構成される。
なお、以下、巡回型IP変換部111で処理される各画像の画素の位置を表す座標系について、水平(横)方向をx軸方向とし、垂直(縦)方向をy軸方向とする。すなわち、各画素の座標は、(x,y)で表される。また、以下、外部からIP変換部121に入力されるインターレース方式のSD画像である入力画像を画像I1とも称し、IP変換部121から出力されるプログレッシブ方式のSD画像である中間画像を画像P1とも称する。
また、一般的に、プログレッシブ画像には、IP変換前のインターレース画像において画素が存在する位置にある画素と、存在しない位置にある画素の2種類の画素がある。以下、この2種類の画素を区別する場合、前者をAタイプの画素、後者をBタイプの画素という。
図3は、IP変換前のインターレース画像およびIP変換後のプログレッシブ画像の画素の位置の関係を示す図である。図3の横軸方向は、時間を示し、縦軸方向は、画素の位置を示す。この図3の例において、白丸に囲まれた黒丸で示される画素が、Aタイプの画素であり、黒丸のみで示される画素が、Bタイプの画素である。
動きベクトル検出部131は、画像I1の各画素の動きベクトルを検出する。具体的には、動きベクトル検出部131は、1フレーム前に巡回型変換部122から出力されたプログレッシブSD画像である出力画像であって、フレームメモリ136に記憶されている画像(以下、画像P3とも称する)を、フレームメモリ136から読み出す。動きベクトル検出部131は、図18を参照して後述するように、画像I1を、所定の大きさ、すなわち、縦N×横M画素のブロックに分割し、ブロックごとに、画素以下精度で、すなわち、プログレッシブ画像における画素の間隔より短い距離を最小単位として、動きベクトルを検出する。なお、画像I1に実際に存在しないBタイプの画素に対しては、その画素が含まれるブロックの動きベクトルが適用される。
なお、以下、ブロックなど、各画像内の所定のブロックの位置を表す座標系について、画素の位置を表す座標系と区別するために、水平(横)方向をX軸方向とし、垂直(縦)方向をY軸方向とする。すなわち、各ブロックの座標は(X,Y)で表される。また、以下、座標(X,Y)のブロックの動きベクトルをV(X,Y)と表し、動きベクトルV(X,Y)の水平方向の成分である水平動き量をVX(X,Y)と表し、動きベクトルV(X,Y)の垂直方向の成分である垂直動き量をVY(X,Y)と表す。なお、以下、水平動き量および垂直動き量の大きさは、プログレッシブ画像における画素間隔を基準として表すことにする。また、以下、各ブロックの左上隅の画素を基準画素といい、基準画素の座標を基準座標という。
動きベクトル検出部131は、検出した動きベクトルV(水平動き量VXおよび垂直動き量VY)を示す情報を、MCブロック差分検出部132、巡回係数設定部133、および、動き補償部134に供給する。また、動きベクトル検出部131は、動きベクトルの検出に用いた画像I1および画像P3をMCブロック差分検出部132に供給する。
MCブロック差分検出部132は、図9および図10を参照して後述するように、画像I1のブロックごとに、各ブロックの画素値と、そのブロックに対応する画像P3のブロック、すなわち、画像I1の各ブロックを動きベクトルVで示される方向および距離だけ移動させた位置にある画像P3のブロックの画素値との差分値であるMCブロック差分値を検出する。MCブロック差分検出部132は、検出したMCブロック差分値を示す情報を巡回係数設定部133に供給する。
なお、以下、画像I1の座標(X,Y)のブロックに対応するブロック差分値を、BD(X,Y)と表す。
巡回係数設定部133は、図8などを参照して後述するように、動きベクトルV、および、MCブロック差分値BDに基づいて、Aタイプの画素に対する巡回係数KA、および、Bタイプの画素に対する巡回係数KBを設定する。なお、以下、座標(x,y)のAタイプの画素に対する巡回係数KAをKA(x,y)と表し、座標(x,y)のBタイプの画素に対する巡回係数KBをKB(x,y)と表す。巡回係数設定部133は、設定した巡回係数KAおよびKBを示す情報を積和演算部135に供給する。
動き補償部134は、フレームメモリ136から画像P3を読み出す。動き補償部134は、図8を参照して後述するように、動きベクトルVに基づいて、画像P3に対して動き補償を施した画像P4を生成する。動き補償部134は、画像P4を積和演算部135に供給する。
積和演算部135は、図10を参照して後述するように、画像P1のAタイプの画素の画素値と画像P4の対応する位置にある画素の画素値とを巡回係数KAを用いて重み付け加算し、画像P1のBタイプの画素の画素値と画像P4の対応する位置にある画素の画素値とを巡回係数KBを用いて重みづけ加算した画素値からなるプログレッシブ方式のSD画像である出力画像(以下、画像P2とも称する)を生成する。積和演算部135は、画像P2を出力位相変換部112に供給するとともに、フレームメモリ136に記憶させる。
なお、以下、画像I1および画像P1乃至P4の座標(x,y)の画素の画素値を、それぞれ、I1(x,y)およびP1(x,y)乃至P4(x,y)と表す。
図4は、動きベクトル検出部131の機能的構成を示すブロック図である。動きベクトル検出部131は、動き評価値検出部151、画素精度動きベクトル検出部152、タップ抽出部153,154、ADRC(Adaptive Dynamic Range Coding)処理部155、クラス分類部156、係数メモリ157、予測演算部158、および、画素以下精度動きベクトル検出部159により構成される。
動き評価値検出部151は、外部から入力される画像I1を取得し、フレームメモリ136から画像P3を取得する。動き評価値検出部151は、画像I1を所定の大きさのブロックに分割し、各ブロックを順次注目ブロックとする。さらに、動き評価値検出部151は、図18を参照して後述するように、画像P3の所定の範囲内の画素を、順次、注目画素とし、注目画素を基準画素とする注目ブロックと同じ大きさのブロック(以下、比較対象ブロックと称する)と注目ブロックとの対応する位置にある画素の画素値との差分をとり、その差分値の絶対値を合計した値を、注目画素に対する動き評価値として求める。動き評価値検出部151は、検出した動き評価値を示す情報を、画素精度動きベクトル検出部152、および、タップ抽出部153,154に供給する。また、動き評価値検出部151は、動きベクトルの検出に用いた画像I1および画像P3をMCブロック差分検出部132に供給する。
なお、以下、座標(x,y)の注目画素に対する動き評価値をM(x,y)と表す。
画素精度動きベクトル検出部152は、図18を参照して後述するように、動き評価値Mが最小となる画素(以下、最小評価値画素と称する)の座標と、注目ブロックの基準画素の座標とを結ぶベクトルを、注目ブロックに対する画素精度、すなわち、プログレッシブ画像における画素の間隔と等しい距離を最小単位とする動きベクトルとして検出する。画素精度動きベクトル検出部152は、検出した画素精度の動きベクトルを示す情報をタップ抽出部153,154に供給する。
タップ抽出部153は、図18を参照して後述するように、最小評価値画素と最小評価値画素に隣接する画素との間の位置、すなわち、画素以下精度の位置(以下、予測位置ともいう)における動き評価値を予測するのに用いる画素であって、最小評価値画素を含む最小評価値画素の近傍の画像P3の画素に対応する動き評価値Mを予測タップとして抽出する。タップ抽出部153は、抽出した予測タップを予測演算部158に供給する。
タップ抽出部154は、図18を参照して後述するように、最小評価値画素を、幾つかのクラスのうちのいずれかにクラス分けするクラス分類を行うのに用いる画像P3のいくつかの画素に対応する動き評価値Mを、クラスタップとして抽出する。タップ抽出部154は、抽出したクラスタップをADRC処理部155に供給する。
ADRC処理部155は、クラスタップを構成する画素の動き評価値MをADRC処理し、その結果得られるADRCコードを示す情報をクラス分類部156に供給する。
なお、KビットADRCにおいては、例えば、クラスタップを構成する画素の動き評価値Mの最大値MAXと最小値MINが検出され、DR=MAX-MINを、クラスタップを構成する動き評価値Mの集合の局所的なダイナミックレンジとし、このダイナミックレンジDRに基づいて、クラスタップを構成する動き評価値MがKビットに再量子化される。即ち、クラスタップを構成する各画素の動き評価値Mから、最小値MINが減算され、その減算値がDR/2Kで除算(量子化)される。そして、以上のようにして得られる、クラスタップを構成するKビットの各画素の動き評価値Mを、所定の順番で並べたビット列が、ADRCコードとして出力される。
クラス分類部156は、ADRC処理部155からのADRCコードに基づき、最小評価値画素をクラス分類し、その結果得られるクラスに対応するクラスコードを示す情報を、係数メモリ157に供給する。
係数メモリ157は、後述する学習によってあらかじめ求められたクラスごとのタップ係数のセットを記憶している。係数メモリ157は、その記憶しているタップ係数のセットのうちの、クラス分類部156から供給されるクラスコードに対応するアドレスに記憶されているタップ係数、すなわち、クラス分類部156から供給されるクラスコードが表すクラスのタップ係数を、予測演算部158に供給する。
予測演算部158は、図18を参照して後述するように、タップ抽出部153が出力する予測タップと、係数メモリ157が出力するタップ係数とを取得し、その予測タップとタップ係数とを用いて、予測位置における動き評価値Mの真値の予測値を求める所定の予測演算を行う。これにより、予測演算部158は、予測位置における動き評価値M'の予測値を求めて、画素以下精度動きベクトル検出部159に供給する。
画素以下精度動きベクトル検出部159は、最小評価値画素および予測位置の中から動き評価値が最小となる画素または位置を検出し、検出した画素または位置の座標と、注目ブロックの基準画素の座標とを結ぶベクトルを、注目ブロックに対する画素以下精度の動きベクトルVとして検出する。画素以下精度動きベクトル検出部159は、検出した動きベクトルVを示す情報をMCブロック差分検出部132および巡回係数設定部133、および、動き補償部134に供給する。
図5は、巡回係数設定部133の機能的構成を示すブロック図である。巡回係数設定部133は、基本巡回係数設定部171、動き分散検出部172、および、巡回係数算出部173により構成される。また、巡回係数算出部173は、動き分散差し引き量算出部181、MCブロック差分差し引き量算出部182、および、減算部183−1乃至183−4により構成される。
基本巡回係数設定部171は、図11乃至図12を参照して後述するように、垂直動き量VYに基づいて、画像P1のAタイプの画素に対する基本巡回係数KA0、および、Bタイプの画素に対する基本巡回係数KB0を設定する。なお、以下、座標(x,y)の画素に対する基本巡回係数KA0をKA0(x,y)と表し、座標(x,y)の画素に対する基本巡回係数KB0をKB0(x,y)と表す。基本巡回係数設定部171は、基本巡回係数KA0を示す情報を減算部183−1に供給し、基本巡回係数KB0を示す情報を減算部183−3に供給する。
動き分散検出部172は、図14および図17を参照して後述するように、動きベクトル検出部131により検出された動きベクトルVの信頼度として、周囲の動きベクトルVとの間のばらつきの度合いを示す動き分散MDを検出する。なお、以下、動きベクトルV(X,Y)に対する動き分散MDを、MD(X,Y)と表す。動き分散検出部172は、動き分散MDを示す情報を動き分散差し引き量算出部181に供給する。
動き分散差し引き量算出部181は、図8を参照して後述するように、動き分散MDに基づいて、基本巡回係数KA0,KB0を補正するための補正値である動き分散差し引き量KM1を算出する。なお、以下、画像P1の座標(x,y)の画素に対する動き分散差し引き量KM1を、KM1(x,y)と表す。動き分散差し引き量算出部181は、動き分散差し引き量KM1を示す情報を減算部183−1および183−3に供給する。
MCブロック差分差し引き量算出部182は、図8を参照して後述するように、MCブロック差分値BDに基づいて、基本巡回係数KA0,KB0を補正するための補正値であるMCブロック差分差し引き量KM2を算出する。なお、以下、画像P1の座標(x,y)の画素に対する動き分散差し引き量KM2を、KM2(x,y)と表す。MCブロック差分差し引き量算出部182は、MCブロック差分差し引き量KM2を示す情報を減算部183−2および183−4に供給する。
減算部183−1は、基本巡回係数KA0から動き分散差し引き量KM1を差し引き、さらに、減算部183−2は、減算部183−1による算出値からMCブロック差分差し引き量KM2を差し引く。これにより、巡回係数KAが算出される。なお、以下、画像P1の座標(x,y)の画素に対する巡回係数KAをKA(x,y)と表す。減算部183−2は、巡回係数KAを示す情報を積和演算部135に供給する。
減算部183−3は、基本巡回係数KB0から動き分散差し引き量KM1を差し引き、さらに、減算部183−4は、減算部183−3による算出値からMCブロック差分差し引き量KM2を差し引く。これにより、巡回係数KBが算出される。なお、以下、画像P1の座標(x,y)の画素に対する巡回係数KBをKB(x,y)と表す。減算部183−4は、巡回係数KBを示す情報を積和演算部135に供給する。
次に、図6のフローチャートを参照して、画像変換装置101により実行される画像変換処理を説明する。なお、この処理は、例えば、外部から画像I1の入力が開始されたとき開始される。
ステップS1において、IP変換部121は、IP変換処理を行う。具体的には、IP変換部121は、外部から入力されるインターレース方式の画像I1をIP変換することにより、画像P1を生成する。ここで、図7を参照して、IP変換部121が行うIP変換処理の一例である、動き適応型と呼ばれる方法を用いたIP変換処理について説明する。
図7は、インターレース画像における垂直方向の画素の並びを示す図である。図7の横軸方向は時間を示し、縦軸方向は画素の位置を示す。また、図内の白丸は画素を示す。なお、図内の左端の画素の列はn−1番目のフィールドに属し、真ん中の画素の列はn番目のフィールドに属し、右端の画素の列はn+1番目のフィールドに属するものとする。
以下、n番目のフィールドのインターレース画像をプログレッシブ画像に変換する場合に、位置xに補間する画素(Bタイプの画素)の画素値を算出する例について説明する。なお、n−1番目のフィールドにおいて、位置xに対応する位置にある画素の画素値をa、n+1番目のフィールドにおいて、位置xに対応する位置にある画素の画素値をbとする。また、n番目のフィールドにおいて、位置xの上に隣接する画素の画素値をc、下に隣接する画素の画素値をdとする。
例えば、|a−b|≦|c−d|である場合、位置xは画像の動きが少ない静止領域に含まれると見なされ、位置xの画素値は、前後のフィールドにおいて位置xに対応する位置にある画素の画素値の平均値である(a+b)/2とされる。一方、|a−b|>|c−d|である場合、位置xは画像の動きが大きい動作領域に含まれると見なされ、位置xの画素値は、上下方向に隣接する画素値の平均値である(c+d)/2とされる。なお、他の位置のBタイプの画素についても、同様の方法により画素値が求められる。
なお、IP変換部121が行うIP変換の方法は、特定の方法に限定されるものではなく、例えば、クラス分類適応処理を用いた方法を用いるようにしてもよい。なお、クラス分類適応処理を用いたIP変換の方法については、例えば、本件出願人が先に出願した特開2000−50213号公報などに、その詳細が開示されている。
また、画像I1をそのままIP変換するのではなく、IP変換する前に、ノイズ除去などの画質を向上させる画像処理を画像I1に施すようにしてもよい。
IP変換部121は、生成した画像P1を順に積和演算部135に供給する。
ステップS2において、巡回型変換部122は、巡回型変換処理を行う。巡回型変換処理の詳細は、図8を参照して後述するが、この処理により、画像P1がより高画質の画像P2に変換され、画像P2が出力位相変換部112に供給される。
ステップS3において、出力位相変換部112は、出力位相変換処理を行う。具体的には、出力位相変換部112は、巡回型変換部122から供給されるSD画像に対して、水平方向および垂直方向に補間を行うことにより、HD画像を生成する。出力位相変換部は、そのHD画像を、自然画予測部113、人工画予測部114、および、自然画人工画判定部115に供給する。
ステップS4において、自然画予測部113は、自然画予測処理を行う。具体的には、出力位相変換部112から供給されるHD画像から、そのHD画像のうちの自然画像を高品質にした自然高品画像を予測する。すなわち、自然画予測部113は、HD画像の特徴に応じて、そのHD画像から求められる自然高品質画像の画素である注目画素を、自然画像の特徴に適したクラスに分類する。そして、自然画予測部113は、そのクラスに対応する、自然高品質画像を予測するための予測係数と、HD画像とを用いて演算することにより、出力位相変換部112から供給されたHD画像から、自然高品質画像を予測する。自然画予測部113は、その自然高品質画像を合成部116に供給する。
ステップS5において、人工画予測部114は、人工画予測処理を行う。具体的には、人工画予測部114は、自然画予測部113と同様に、出力位相変換部112から供給されるHD画像から、そのHD画像のうちの人工画像を高品質にした人工高品質画像を予測する。すなわち、人工画予測部114は、HD画像の特徴に応じて、そのHD画像から求められる人工高品質画像の画素である注目画素を、人工画像の特徴に適したクラスに分類する。そして、人工画予測部114は、そのクラスに対応する、人工高品質画像を予測するための予測係数と、HD画像とを用いて演算することにより、出力位相変換部112から供給されたHD画像から、人工高品質画像を求める。人工画予測部114は、その人工高品質画像を合成部116に出力する。
ステップS6において、自然画人工画判定部115は、自然画人工画判定処理を行う。具体的には、自然画人工画判定部115は、出力位相変換部112より供給されるHD画像の各画素について、人工画像に分類される領域、または、自然画像に分類される領域のいずれの領域に属するかを判定し、判定結果を人工画度として合成部116に出力する。
ステップS7において、合成部116は、画像を合成する。具体的には、合成部116は、自然画人工画判定部115より供給される判定結果に基づいて、自然画予測部113から供給される自然高品質画像の各画素の画素値と、人工画予測部114から供給される人工高品質画像の各画素の画素値とを人工画度に応じた割合で合成する。合成部116は、合成した画像を後段の装置に出力する。
なお、複数の画像の画像変換を連続して行う場合、上述したステップS1乃至S7の処理が繰り返し実行される。
次に、図8を参照して、図6のステップS2の巡回型変換処理の詳細を説明する。
ステップS21において、動きベクトル検出部131は、動きベクトル検出処理を行う。動きベクトル検出処理の詳細は、図18を参照して後述するが、この処理により、画像I1の各画素の画素以下精度の動きベクトルVが検出される。また、検出された動きベクトルVの水平動き量VXおよび垂直動き量VYを示す情報が、動きベクトル検出部131から、MCブロック差分検出部132および巡回係数設定部133、および、動き補償部134に供給される。また、動きベクトルVの検出に用いた画像I1および画像P3が、動きベクトル検出部131からMCブロック差分検出部132に供給される。
ステップS22において、MCブロック差分検出部132は、MCブロック差分値を検出する。ここで、図9および図10を参照して、MCブロック差分値の検出方法を説明する。
まず、図9に示されるように、画像I1のブロックB0に対応する位置にある画像P3のブロックをB0'とする。また、ブロックB0の動きベクトルVで示される方向および距離だけブロックB0'を移動させたブロックをブロックB1とする。
動きベクトルVは画素以下精度であるため、水平動き量VXまたは垂直動き量VYに小数部分が存在する場合、ブロックB1の画素の位置は、画像P3の実際の画素の位置と一致しない。ここで、図10を参照して、ブロックB1が、画像P3における実際の画素の位置と一致しない場合に、ブロックB1の各画素の画素値を算出する方法を説明する。
図10の黒丸で示される画素zは、ブロックB1内の1つの画素であって、画像P3に実在しない位置にある画素である。白丸で示される画素a乃至dは、画素zに隣接する(すなわち、最も近い)画像P3に実在する画素である。画素a乃至dおよび画素zの画素値を、それぞれa乃至dおよびzとし、画素zの左斜め上にある画素aと画素zと間のx軸方向の距離をxd、y軸方向の距離をydとした場合、画素zの画素値zは、以下の式(1)に基づいて算出される。
z=(1−yd)×((1−xd)×a+xd×b)+yd×((1−xd)×c+xd×d) ・・・(1)
なお、ブロックB1の画素の位置が、画像P3に実在する画素の位置と一致する場合、そのまま画像P3の画素値がブロックB1の各画素の画素値とされる。
MCブロック差分検出部132は、ブロックB1の各画素の画素値を算出した後、以下の式(2)に基づいて、MCブロック差分値BDを算出する。
なお、B0(i,j)は、ブロックB0の左上隅の画素である基準画素を原点(0,0)とする位置(i,j)にあるブロックB0内の画素の画素値を示し、B1(i,j)は、ブロックB1の基準画素を原点(0,0)とする位置(i,j)にあるブロックB1内の画素の画素値を示す。すなわち、MCブロック差分値BDは、ブロックB0とブロックB1の対応する位置にある画素の画素値の差分をとり、その差分値の絶対値の合計値となる。
従って、現在のフレームと1つ前のフレームの対応するブロック内の画像の変化が大きいほど、MCブロック差分値BDは大きくなる。すなわち、MCブロック差分値BDが大きいブロックは、被写体が変形もしくは複雑な動きをしていたり、小さな被写体が複数存在していたり、被写体のエッジ部分を含んでいたりするなどの原因により、画像の動きが複雑な領域のブロックである可能性が高い。従って、そのブロックについて検出された動きベクトルVは正確に検出されていない可能性が高く、その動きベクトルVの信頼度は低いと言える。
MCブロック差分検出部132は、画像I1の各ブロックについて、MCブロック差分値BDを検出し、検出したMCブロック差分値BDを示す情報をMCブロック差分差し引き量算出部182に供給する。
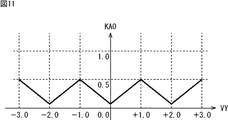
ステップS23において、基本巡回係数設定部171は、基本巡回係数を設定する。具体的には、基本巡回係数設定部171は、画像P1のAタイプの画素に対する基本巡回係数KA0を、その画素が含まれるブロックの垂直動き量VY、および、図11に示されるグラフに基づいて設定し、Bタイプの画素に対する基本巡回係数KB0を、その画素が含まれるブロックの垂直動き量VX、および、図12に示されるグラフに基づいて設定する。
ここで、図11および図12に示されるグラフについて説明する。図11は、垂直動き量VYと基本巡回係数KA0の関係を示すグラフであり、図12は、垂直動き量VYと基本巡回係数KB0の関係を示すグラフである。
ところで、画像の垂直折り返し歪みは、画素以下精度の垂直動き量に応じて変化する性質がある。具体的には、各画素の垂直動き量の絶対値が、画素間隔の奇数倍に近い領域ほど、垂直折り返し歪みは大きくなり、0または画素間隔の偶数倍に近い領域ほど、垂直折り返し歪みは小さくなる。例えば、図13に示されるn番目のフレームの画素Paの垂直動き量VYが、図内のVY1,VY3,VY5,VY7のように、画素間隔の奇数倍に近いほど、垂直折り返し歪みは大きくなり、VY2,VY4,VY6のように、0.0または画素間隔の偶数倍に近いほど、垂直折り返し歪みは小さくなる。
なお、後述するように、巡回係数の値が大きいほど、垂直折り返し歪みを抑制する効果が高くなる一方、画像のボケが発生しやすくなり、値が小さいほど、垂直折り返し歪みを抑制する効果が低くなる一方、画像のボケの発生が抑制される。従って、図11および図12のグラフに示されるように、垂直動き量VYの絶対値が0または偶数に近いほど、すなわち、垂直方向の画素間隔の偶数倍に近いほど、画像のボケを抑制できるように、基本巡回係数KA0,KB0が小さい値に設定され、垂直動き量VYの絶対値が奇数に近いほど、すなわち、垂直方向の画素の間隔の奇数倍に近いほど、垂直折り返し歪みが抑制されるように、基本巡回係数KA0,KB0が大きい値に設定される。
なお、垂直動き量VYの絶対値が0または偶数の場合、垂直折り返し歪みは発生しないが、図11および図12のグラフのように、垂直折り返し歪み以外のランダムなノイズを除去できるように、基本巡回係数KA0,KB0を0以外の適当な値に設定するようにしてもよい。
また、Bタイプの画素は、変換前の画像I1に元々なかった画素であり、少々のボケは許容される。従って、折り返し歪みおよびランダムノイズがより抑制されるように、同じ値の垂直動き量VYに対して、KB0の方がKA0よりも大きい値に設定される。
このように、画素のタイプおよび垂直動き量に応じて、基本巡回係数KA0,KB0を設定することにより、画像P1の解像度を良好に保ちつつ、すなわち、画像をぼかさずに、垂直折り返し歪みやノイズを除去することが可能になる。
基本巡回係数設定部171は、基本巡回係数KA0を示す情報を減算部183−1に供給し、基本巡回係数KB0を示す情報を減算部183−3に供給する。
ステップS24において、動き分散検出部172は、動き分散を検出する。ここで、図14および図15を参照して、動き分散について説明する。
図14および図15は、動きベクトルの分布の例を示す図である。図14に示されるように、斜線で示されるブロックの動きベクトルV0aが、周辺の動きベクトルV1a乃至V8aとほぼ同様である場合、すなわち、動きベクトルV0aと周辺のブロックの動きベクトルV1a乃至V8aとの類似性が高い場合、動きベクトルV0aは正確に求められている可能性が高く、動きベクトルV0aの信頼度は高いと言える。
一方、図15に示されるように、斜線で示されるブロックの動きベクトルV0bおよび周辺のブロックの動きベクトルV1b乃至V8bの大きさや向きが大きく異なる場合、すなわち、動きベクトルV0bと周辺の動きベクトルV1b乃至V8bとの類似性が低い場合、動きベクトルV0bは正確に求められていない可能性が高く、動きベクトルV0bの信頼度は低いと言える。
そこで、動き分散検出部172は、動きベクトル検出部131により検出された動きベクトルVの信頼度として、各動きベクトルVについて、周辺の動きベクトルVとのばらつきの度合いを示す動き分散MD0を検出する。
具体的には、例えば、図16の斜線で示される座標(X,Y)のブロックBpの動きベクトルV(X,Y)に対する動き分散MD0(X,Y)を、ブロックBpを中心とする縦Nb0×横Mb0ブロック(画素数で表現した場合、縦Np0×横Mp0画素)の領域D0を対象に、以下の式(3)に基づいて算出する。なお、領域D0の左上隅の画素の座標を(x0,y0)とする。
なお、vx0(x,y)は、座標(x,y)の画素が含まれるブロックの水平動き量を示し、vy0(x,y)は、座標(x,y)の画素が含まれるブロックの垂直動き量を示す。
すなわち、動き分散MD0は、ブロックBpの動きベクトルVと、領域D0内の各画素の動きベクトルVとの間の距離の2乗の平均値を表す。
また、動き分散検出部172は、動きベクトルVの信頼度として、各動きベクトルVについて、その動きベクトルVに対応する画素(またはブロック)を、動きベクトルVで示される方向および距離だけ移動した位置の周辺における1フレーム前の動きベクトルVとのばらつきを示す動き分散MD1を検出する。
具体的には、例えば、まず、図16のブロックBpに対応する位置にある1フレーム前の画像のブロックを、図17のブロックBp'とする。また、ブロックBpの動きベクトルV(X,Y)の水平動き量VX(X,Y)および垂直動き量VY(X,Y)の小数点以下を四捨五入した値により示される方向および距離だけブロックBp'を移動させたブロックをブロックBmとする。動き分散検出部172は、ブロックBpの動きベクトルV(X,Y)に対する動き分散MD1(X,Y)を、ブロックBmを中心とする縦Nb1×横Mb1ブロック(画素数で表現した場合、縦Np1×横Mp1画素)の領域D1を対象に、以下の式(4)に基づいて算出する。なお、領域D1の左上隅の画素の座標を(x1,y1)とする。
なお、vx1(x,y)は、1フレーム前の座標(x,y)の画素が含まれるブロックの水平動き量を示し、vy1(x,y)は、1フレーム前の座標(x,y)の画素が含まれるブロックの垂直動き量を示す。
すなわち、動き分散MD1は、ブロックBpの動きベクトルVと、領域D1内の各画素の動きベクトルVとの間の距離の2乗の平均値を表す。
さらに、動き分散検出部172は、以下の式(5)に基づいて、動き分散MD(X,Y)を算出する。
MD(X,Y)=MD1(X,Y)+MD2(X,Y) ・・・(5)
従って、対象となる動きベクトルVと周囲の動きベクトルVとの間のばらつきが大きいほど、動き分散MD(X,Y)は大きくなる。すなわち、その動きベクトルV(X,Y)に対応する画素およびその近傍は、被写体が変形もしくは複雑な動きをしていたり、小さな被写体が複数存在していたりするなどの原因により、画像の動きが複雑な領域である可能性が高い。従って、その動きベクトルVは正確に検出されていない可能性が高く、その動きベクトルV(X,Y)の信頼度は低いと言える。
動き分散検出部172は、上述した方法に従って、各動きベクトルVに対する動き分散MDを算出し、動き分散MDを示す情報を動き分散差し引き量算出部181に供給する。
ステップS25において、動き分散差し引き量算出部181は、動き分散差し引き量を算出する。具体的には、動き分散差し引き量算出部181は、画像P1の各画素に対する動き分散差し引き量KM1を、その画素が含まれるブロックの動き分散MDを用いて、以下の式(6)に基づいて算出する。
KM1(x,y)= a1×MD(X,Y)+b1 ・・・(6)
なお、a1およびb1は所定の値の定数である。ただし、定数a1は正の値とされる。また、式(6)の右辺の値が0より小さくなる場合、KM1(x,y)は0に補正される。
動き分散差し引き量算出部181は、算出した動き分散差し引き量KM1を示す情報を減算部183−1および183−3に供給する。
ステップS26において、MCブロック差分差し引き量算出部182は、MCブロック差分差し引き量を求める。具体的には、MCブロック差分差し引き量算出部182は、画像P1の各画素に対するMCブロック差分差し引き量KM2を、その画素が含まれるブロックのMCブロック差分値BDを用いて、以下の式(7)に基づいて算出する。
KM2(x,y)= a2×BD(X,Y)+b2 ・・・(7)
なお、a2,b2は所定の定数である。ただし、定数a2は正の値とされる。また、式(7)の右辺の値が0より小さくなった場合、KM2(x,y)は0に補正される。
ステップS27において、減算部183−1乃至183−4は、巡回係数を算出する。具体的には、減算部183−1は、基本巡回係数KA0から動き分散差し引き量KM1を引いた値を減算部183−2に供給する。減算部183−2は、減算部183−1から供給される値からMCブロック差分差し引き量KM2を引いた値を巡回係数KAとして、積和演算部135に供給する。すなわち、画像P1の座標(x,y)にあるAタイプの画素に対する巡回係数KA(x,y)は、以下の式(8)に基づいて算出される。
KA(x,y)=KA0(x,y)−KM1(x,y)−KM2(x,y) ・・・(8)
また、減算部183−3は、基本巡回係数KB0から動き分散差し引き量KM1を引いた値を減算部183−4に供給する。減算部183−4は、減算部183−3から供給される値からMCブロック差分差し引き量KM2を引いた値を巡回係数KBとして、積和演算部135に供給する。すなわち、画像P1の座標(x,y)にあるBタイプの画素に対する巡回係数KB(x,y)は、以下の式(9)に基づいて算出される。
KB(x,y)=KB0(x,y)−KM1(x,y)−KM2(x,y) ・・・(9)
すなわち、巡回係数KA(x,y)およびKB(x,y)は、動き分散差し引き量KM1(x,y)またはMCブロック差分差し引き量KM2(x,y)が大きいほど、すなわち、動き分散MD(x,y)またはMCブロック差分値BD(x,y)が大きいほど、小さくなるように補正される。
ステップS28において、動き補償部134は、1フレーム前の出力画像に対して動き補償を施す。具体的には、動き補償部134は、フレームメモリ136から1フレーム前の画像P3を読み出す。動き補償部134は、動きベクトルVを用いて、画像P3に対して動き補償を施した画像P4を生成する。
なお、画像P4の各画素の画素値は、その画素に対応する位置にある画像P1の画素の動きベクトルVで示される方向および距離だけ移動した位置にある画像P3の画素の画素値とされる。ただし、動きベクトルVの水平動き量VXまたは垂直動き量VYに小数部分が存在し、画像P3の動きベクトルVだけ移動した位置に実際の画素が存在しない場合、図10を参照して上述した方法と同様の方法により、画像P4の画素値が算出される。
動き補償部134は、画像P4の画素値P4(x,y)を順に積和演算部135に供給する。
ステップS29において、積和演算部135は、画像を合成し、巡回型変換処理は終了する。具体的には、積和演算部135は、画像P1と画像P4の対応する位置にある画素の画素値を、巡回係数KAまたはKBを用いて、重み付け加算する。すなわち、積和演算部135は、Aタイプの画素については、巡回係数KAを用いて、以下の式(10)に基づいて、画像P2の画素値P2(x,y)を算出し、Bタイプの画素については、巡回係数KBを用いて、以下の式(11)に基づいて、画像P2の画素値P2(x,y)を算出する。
P2(x,y)=(1−KA(x,y))×P1(x,y)+KA(x,y)×P4(x,y) ・・・(10)
P2(x,y)=(1−KB(x,y))×P1(x,y)+KB(x,y)×P4(x,y) ・・・(11)
一般的に、巡回係数KA(x,y)およびKB(x,y)の値が大きくなるほど、画像P2における画像P4の成分の占める割合が大きくなるため、画像P2における、垂直折り返し歪みの発生の抑制効果が高くなる一方、画像のボケが発生しやすくなり、巡回係数KA(x,y)およびKB(x,y)の値が小さくなるほど、画像P2において画像P4の成分の占める割合が小さくなるため、画像P2における垂直折り返し歪みの発生の抑制効果が低くなる一方、画像のボケの発生は抑制される。
本発明の実施の形態では、巡回係数KA(x,y)およびKB(x,y)は、上述したように、動き分散差し引き量KM1(x,y)またはMCブロック差分差し引き量KM2(x,y)が大きいほど、すなわち、動き分散MD(x,y)またはMCブロック差分値BD(x,y)が大きいほど小さくなる。
すなわち、座標(x,y)の画素の動きベクトルV(X,Y)の信頼度が低く、重み付け加算する画像P1の画素と画像P4の画素との相関が低い可能性が高い場合、または、その画素が、折り返し歪みまたはランダムノイズが目立ちにくい、画像の動きが複雑な領域に含まれる可能性が高い場合、画素値P2(x,y)における画素値P1(x,y)の成分が占める割合が大きくなる。一方、座標(x,y)の画素の動きベクトルV(X,Y)の信頼度が高く、重み付け加算する画像P1の画素と画像P4の画素との相関が高い可能性が高い場合、または、その画素が、折り返し歪みまたはランダムノイズが目立ちやすい、広い範囲にわたって画像の動きが少ない領域に含まれる可能性が高い場合、画素値P2(x,y)における画素値P1(x,y)の成分が占める割合が大きくなる。
また、垂直動き量VY(X,Y)の絶対値が奇数に近いほど、すなわち、垂直折り返し歪みが大きいほど、巡回係数KA(x,y)およびKB(x,y)は大きくなり、画素値P2(x,y)における画素値P4(x,y)の成分が占める割合が大きくなる。一方、垂直動き量VY(X,Y)の絶対値が0または偶数に近いほど、すなわち、垂直折り返し歪みが小さいほど、巡回係数KA(x,y)およびKB(x,y)は小さくなり、画素値P2(x,y)における画素値P1(x,y)の成分が占める割合が大きくなる。
さらに、同じ垂直動き量VYに対して、Bタイプの画素に対する基本巡回係数KB0の方がAタイプの画素に対する基本巡回係数KA0より大きな値に設定され、かつ、動き分散差し引き量KM1およびMCブロック差し引き量KM2は画素のタイプの違いにより値は変わらないので、同様の画像の領域においては、巡回係数KB(x,y)の方がKA(x,y)より大きくなり、画像P2のBタイプの画素の方が、Aタイプの画素より、画素値P2(x,y)における画素値P4(x,y)の成分が占める割合が大きくなる。
従って、画像P2において、垂直折り返し歪みおよびランダムノイズが抑制されるとともに、画像のボケが抑制され、解像度の高い画質を得ることができる。
積和演算部135は、生成した画像P2を出力位相変換部112に供給するとともに、フレームメモリ136に記憶させる。
次に、図18のフローチャートを参照して、図8のステップS21の動きベクトル検出処理の詳細を説明する。
ステップS41において、動き評価値検出部151は、1フレーム前の画像を取得する。具体的には、動き評価値検出部151は、1フレーム前の出力画像である画像P3を、フレームメモリ136から読み出す。
ステップS42において、動き評価値検出部151は、画素位置の動き評価値を算出する。具体的には、動き評価値検出部151は、画像I1内のブロックのうち、まだ動きベクトルを検出していないブロックを1つ選択して、注目ブロックとする。動き評価値検出部151は、画像P3の所定の範囲内の画素を、順次、注目画素とし、各注目画素における動き評価値M(x,y)を、以下の式(12)により求める。
なお、式(12)において、注目画素の座標を(x,y)とし、注目ブロックの基準画素(左上隅)の座標を(xb,yb)とする。
すなわち、動き評価値Mは、注目画素を基準画素とする比較対象ブロックと注目ブロックとの対応する位置にある画素の画素値の差分をとり、その差分値の絶対値を合計した値であり、動き評価値Mが小さいほど、比較対象ブロック内の画像は、より注目ブロック内の画像に近いと言える。
動き評価値検出部151は、検出した各画素の動き評価値Mを示す情報を画素精度動きベクトル検出部152、および、タップ抽出部153,154に供給する。
ステップS43において、画素精度動きベクトル検出部152は、画素精度の動きベクトルを検出する。具体的には、画素精度動きベクトル検出部152は、動き評価値Mが最小となる最小評価値画素を検出する。画素精度動きベクトル検出部152は、最小評価値画素の座標と注目ブロックの基準画素の座標とを結ぶベクトルを、注目ブロックの画素精度の動きベクトルとして検出する。画素精度動きベクトル検出部152は、検出した画素精度の動きベクトルを示す情報をタップ抽出部153,154に供給する。
ステップS44において、タップ抽出部153は、予測タップを抽出する。具体的には、タップ抽出部153は、最小評価値画素を含む最小評価値画素の近傍の画像P3の画素に対応する動き評価値Mを予測タップとして抽出する。
図19は、画像P3の一部を示す図である。なお、図19において、最小評価値画素を画素P0とし、画素P0乃至P24に対応する動き評価値を動き評価値M0乃至M24とする。例えば、タップ抽出部153は、最小評価値画素である画素P0、画素P0の外周に隣接する画素P1乃至P8、および、画素P1乃至P8の外周に隣接する画素P9乃至P24に対応する動き評価値M0乃至M24を、予測タップとして抽出する。タップ抽出部153は、抽出した予測タップを予測演算部158に供給する。
ステップS45において、タップ抽出部154は、クラスタップを抽出する。例えば、タップ抽出部154は、図19に示される例において、最小評価値画素である画素P0および画素P0に隣接する画素P1乃至P8に対応する動き評価値M0乃至M8を、クラスタップとして抽出する。タップ抽出部154は、抽出したクラスタップをADRC処理部155に供給する。
ステップS46において、ADRC処理部155は、ADRC処理を行う。具体的には、ADRC処理部155は、クラスタップを構成する画素の動き評価値MをADRC処理し、その結果得られるADRCコードを示す情報をクラス分類部156に供給する。
ステップS47において、クラス分類部156は、クラス分類を行う。具体的には、クラス分類部156は、ADRC処理部155からのADRCコードに基づき、最小評価値画素をクラス分類し、その結果得られるクラスに対応するクラスコードを示す情報を、係数メモリ157に供給する。
ステップS48において、係数メモリ157は、タップ係数を供給する。具体的には、係数メモリ157は、内部に記憶しているタップ係数のセットのうち、最小評価値画素のクラスコードに対応するタップ係数を取得する。係数メモリ157は、取得したタップ係数を予測演算部158に供給する。
ステップS49において、予測演算部158は、予測演算を行う。具体的には、例えば、図19に示される例において、画素P0と画素P1乃至P8とを結ぶ直線上の位置であって、ちょうど中間の位置P1'乃至P8'を予測位置とした場合、予測演算部158は、以下の式(13)に基づいて、位置P1'乃至P8'における動き評価値M1'乃至M8'を算出する。
なお、wmn(n=0乃至24)は、位置Pm'(m=1乃至8)の動き評価値Mm'(m=1乃至8)を算出するために用いるタップ係数である。
予測演算部158は、各予測位置における動き評価値Mm'を、画素以下精度動きベクトル検出部159に供給する。
ステップS50において、画素以下精度動きベクトル検出部159は、画素以下精度の動きベクトルを検出する。具体的には、例えば、図19に示される例の場合、画素以下精度動きベクトル検出部159は、画素P0および位置P1'乃至P8'の動き評価値のうち、最小となるものを検出する。画素以下精度動きベクトル検出部159は、動き評価値が最小の画素または位置の座標と、注目ブロックの基準画素の座標とを結ぶベクトルを、注目ブロックに対する画素以下精度の動きベクトルVとして検出する。すなわち、この例においては、画素の間隔の2分の1の精度で動きベクトルが検出される。
なお、画素間に設定する予測位置の数を増やすことにより、より高い精度で、すなわち、より小さい単位で動きベクトルを検出することが可能となる。
画素以下精度動きベクトル検出部159は、検出した動きベクトルVを示す情報をMCブロック差分検出部132、巡回係数設定部133、および、動き補償部134に供給する。
ステップS51において、動き評価値検出部151は、動きベクトルを全て検出したかを判定する。まだ動きベクトルを検出していないブロックが残っている場合、動き評価値検出部151は、動きベクトルをまだ全て検出していないと判定し、処理はステップS42に戻る。その後、ステップS51において、動きベクトルを全て検出したと判定されるまで、ステップS42乃至S51の処理が繰り返し実行される。
ステップS51において、動きベクトルが全て検出されたと判定された場合、処理はステップS52に進む。
ステップS52において、動き評価値検出部151は、動きベクトルの検出に用いた画像を供給し、画素以下精度動きベクトル検出処理は終了する。具体的には、動き評価値検出部151は、動きベクトルの検出に用いた画像I1および画像P3をMCブロック差分検出部132に供給する。
次に、係数メモリ157に記憶されるタップ係数の学習について説明する。
まず、より一般化した例に基づいて、クラス分類適応処理におけるタップ係数の学習について説明する。具体的には、HD画像を構成する画素(以下、適宜、HD画素という)の画素値yを、SD画像を構成する画素(以下、適宜、SD画素という)から、HD画素を予測するための予測タップとして抽出される複数のSD画素と、タップ係数とを用いて、次の線形1次式による線形結合によって求める線形1次結合モデルの例に基づいて、タップ係数の学習について説明する。
但し、式(14)において、xnは、HD画素yについての予測タップを構成する、n番目のSD画像データの画素の画素値を表し、wnは、n番目のSD画素の画素値と乗算されるn番目のタップ係数を表す。なお、式(14)では、予測タップが、N個のSD画素x1,x2,・・・,xNで構成されるものとしてある。
いま、第kサンプルのHD画素の画素値の真値をykと表すとともに、式(14)によって得られるその真値ykの予測値をyk’と表すと、その予測誤差ekは、次式で表される。
式(15)の予測値yk’は、式(14)にしたがって求められるため、式(15)のyk’を、式(14)にしたがって置き換えると、次式が得られる。
但し、式(16)において、xn,kは、第kサンプルのHD画素についての予測タップを構成するn番目のSD画素を表す。
式(16)の予測誤差ekを0とするタップ係数wnが、HD画素を予測するのに最適なものとなるが、すべてのHD画素について、そのようなタップ係数wnを求めることは、一般には困難である。
そこで、タップ係数wnが最適なものであることを表す規範として、例えば、最小自乗法を採用することとすると、最適なタップ係数wnは、統計的な誤差としての、例えば、次式で表される自乗誤差の総和Eを最小にすることで求めることができる。
但し、式(17)において、Kは、HD画素ykと、そのHD画素ykについての予測タップを構成するSD画素x1,k,x2,k,・・・,xN,kとのセットのサンプル数を表す。
式(17)の自乗誤差の総和Eを極小にするタップ係数wnは、その総和Eをタップ係数wnで偏微分したものを0とするものであり、従って、次式を満たす必要がある。
そこで、上述の式(18)をタップ係数wnで偏微分すると、次式が得られる。
式(18)と式(19)から、次式が得られる。
式(20)のekに、式(16)を代入することにより、式(20)は、式(21)に示す正規方程式で表すことができる。
式(21)の正規方程式は、HD画素ykとSD画素xn,kのセットを、ある程度の数だけ用意することで、求めるべきタップ係数wnの数と同じ数だけたてることができ、従って、式(21)を解くことで、最適なタップ係数wnを求めることができる。なお、式(21)を解くにあたっては、例えば、掃き出し法(Gauss-Jordanの消去法)などを採用することが可能である。但し、式(21)を解くには、式(21)において、タップ係数wnにかかる左辺の行列が正則である必要がある。
以上のように、多数のHD画素y1,y2,・・・,yKを、タップ係数の学習の教師となる教師データとするとともに、各HD画素ykについての予測タップを構成するSD画素x1,k,x2,k,・・・,xN,kを、タップ係数の学習の生徒となる生徒データとして、式(21)を解くことにより、最適なタップ係数wnを求めることができる。
ここで、教師データyとして、予測位置にも画素が存在する、画像P3より画素密度が高い画像の各画素について検出した動き評価値Mからなる画像(以下、教師画像と称する)を採用し、生徒データxとして、画像P3と同じ画素密度となるように、教師画像から画素を間引いた画像を採用することにより、式(13)で用いられるタップ係数を求めることができる。
なお、クラス分類適応処理を用いた画素以下精度の動きベクトルを検出する方法については、例えば、本件出願人が先に出願した特開平9−187013号公報などに、その詳細が開示されている。
以上のようにして、インターレース方式の画像を、より良好な画質のプログレッシブ方式の画像に変換することができる。
また、例えば、巡回型IP変換部111からは、垂直折り返し歪みやノイズが取り除かれた画像が出力されるため、後段の画像処理装置において、より良好な画質を得ることができる。例えば、本件出願人が先に出願した特開2002−218413号公報に記載されている、クラス分類適応処理を用いて画質を複数の軸で自由に調整する処理において、より強く解像度を上げるように調整することが可能となり、より良好な画質を得ることができる。
なお、以上の説明では、画像I1の動きベクトルVを検出する対象となる画像を1フレーム前の出力画像である画像P3とする例について説明したが、例えば、画像P3の代わりに、1フィールド前の入力画像である画像I2または2フィールド前の入力画像である画像I3を用いるようにしてもよい。
図20は、画像I1の動きベクトルVを検出する対象となる画像として、1フィールド前の入力画像である画像I2を用いる場合の巡回型変換部201の機能的構成を示すブロック図である。巡回型変換部201は、フレームメモリ211、動きベクトル検出部212、MCブロック差分検出部213、巡回係数設定部133、動き補償部134、積和演算部135、および、フレームメモリ136により構成される。なお、図2と対応する部分については、同じ符号を付してあり、処理が同じ部分については、その説明は繰り返しになるので省略する。
フレームメモリ211は、外部から入力された画像I1を記憶し、1フィールド分遅延させて、動きベクトル検出部212に供給する。すなわち、巡回型変換部201に入力されてから1フィールド分遅延された画像I1である画像I2が動きベクトル検出部212に供給される。
動きベクトル検出部212は、画像I1の画像I2に対する動きベクトルVを、上述した動きベクトル検出部131と同様の方法により検出する。動きベクトル検出部212は、検出した動きベクトルVの水平動き量VXおよび垂直動き量VYを示す情報を、MCブロック差分検出部213、巡回係数設定部133、および、動き補償部134に供給する。また、動きベクトル検出部212は、動きベクトルVの検出に用いた画像I1および画像I2をMCブロック差分検出部213に供給する。
MCブロック差分検出部213は、画像I1のブロックごとに、各ブロックの画素値と、そのブロックに対応する画像I2のブロック、すなわち、画像I1の各ブロックを動きベクトルVで示される方向および距離だけ移動させた位置にある画像I2のブロックの画素値との差分値であるMCブロック差分値を検出する。MCブロック差分検出部213は、検出したMCブロック差分値BDを示す情報を巡回係数設定部133に供給する。
図21は、画像I1の動きベクトルVを検出する対象となる画像として、2フィールド前の入力画像である画像I3を用いる場合の巡回型変換部301の機能的構成を示すブロック図である。巡回型変換部301は、フレームメモリ311,312、動きベクトル検出部313、MCブロック差分検出部314、巡回係数設定部133、動き補償部134、積和演算部135、および、フレームメモリ136により構成される。なお、図2と対応する部分については、同じ符号を付してあり、処理が同じ部分については、その説明は繰り返しになるので省略する。
フレームメモリ311は、外部から入力された画像I1を記憶し、1フィールド分遅延させて、フレームメモリ312に供給する。すなわち、巡回型変換部301に入力されてから1フィールド分遅延された画像I1である画像I2がフレームメモリ312に供給される。
フレームメモリ312は、画像I2を記憶し、1フィールド分遅延させて、動きベクトル検出部313に供給する。すなわち、巡回型変換部301に入力されてから2フィールド分遅延された画像I1である画像I3が動きベクトル検出部313に供給される。
動きベクトル検出部313は、画像I1の画像I3に対する動きベクトルVを、上述した動きベクトル検出部131と同様の方法により検出する。なお、検出した動きベクトルVは、画像I1が入力されるフィールド間隔および画像P2が出力されるフレーム間隔の2倍の間隔、すなわち、2フィールドの間における動きベクトルであるため、動きベクトル検出部313は、整合性をとるために、検出した動きベクトルの大きさを半分にしたベクトル、すなわち、水平動き量VXおよび垂直動き量VYを2分の1にした値を示す情報を、MCブロック差分検出部314、巡回係数設定部133、および、動き補償部134に供給する。また、動きベクトル検出部313は、動きベクトルVの検出に用いた画像I1および画像I3をMCブロック差分検出部314に供給する。
MCブロック差分検出部314は、画像I1のブロックごとに、各ブロックの画素値と、各ブロックに対応する画像I3のブロック、すなわち、画像I1の各ブロックを動きベクトルVの2分の1のベクトルで示される方向および距離だけ移動させた位置にある画像I3のブロックの画素値との差分値であるMCブロック差分値を検出する。MCブロック差分検出部314は、検出したMCブロック差分値BDを示す情報を巡回係数設定部133に供給する。
また、画素以下精度の動きベクトルの検出方法は、上述した方法に限定されるものではなく、他の方法を用いるようにしてもよい。
さらに、以上の説明では、SD画像をIP変換処理する例について説明したが、もちろん、本発明は、HD画像など高解像度の画像のIP変換処理にも適用することが可能である。
なお、本発明は、例えば、テレビジョン受像機など、インターレース画像をプログレッシブ画像に変換する画像処理装置に適用することができる。
上述した一連の処理は、ハードウエアにより実行させることもできるし、ソフトウエアにより実行させることもできる。一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、プログラム記録媒体からインストールされる。
図22は、上述した一連の処理をプログラムにより実行するパーソナルコンピュータ400の構成の例を示すブロック図である。CPU(Central Processing Unit)401は、ROM(Read Only Memory)402、または記録部408に記憶されているプログラムに従って各種の処理を実行する。RAM(Random Access Memory)403には、CPU401が実行するプログラムやデータなどが適宜記憶される。これらのCPU401、ROM402、およびRAM403は、バス404により相互に接続されている。
CPU401にはまた、バス404を介して入出力インタフェース405が接続されている。入出力インタフェース405には、キーボード、マウス、マイクロホンなどよりなる入力部406、ディスプレイ、スピーカなどよりなる出力部407が接続されている。CPU401は、入力部406から入力される指令に対応して各種の処理を実行する。そして、CPU401は、処理の結果を出力部407に出力する。
入出力インタフェース405に接続されている記録部408は、例えばハードディスクからなり、CPU401が実行するプログラムや各種のデータを記憶する。通信部409は、インターネットやローカルエリアネットワークなどのネットワークを介して外部の装置と通信する。
また、通信部409を介してプログラムを取得し、記録部408に記憶してもよい。
入出力インタフェース405に接続されているドライブ410は、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどのリムーバブルメディア411が装着されたとき、それらを駆動し、そこに記録されているプログラムやデータなどを取得する。取得されたプログラムやデータは、必要に応じて記録部408に転送され、記憶される。
コンピュータにインストールされ、コンピュータによって実行可能な状態とされるプログラムを格納するプログラム記録媒体は、図22に示すように、磁気ディスク(フレキシブルディスクを含む)、光ディスク(CD-ROM(Compact Disc-Read Only Memory),DVD(Digital Versatile Disc)を含む)、光磁気ディスク、もしくは半導体メモリなどよりなるパッケージメディアであるリムーバブルメディア411、または、プログラムが一時的もしくは永続的に格納されるROM402や、記録部408を構成するハードディスクなどにより構成される。プログラム記録媒体へのプログラムの格納は、必要に応じてルータ、モデムなどのインタフェースである通信部409を介して、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の通信媒体を利用して行われる。
なお、本明細書において、プログラム記録媒体に格納されるプログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
さらに、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
101 画像変換装置, 111 巡回型IP変換部, 121 IP変換部, 122 巡回型変換部, 131 動きベクトル検出部, 132 MCブロック差分検出部, 133 巡回係数設定部, 134 動き補償部, 135 積和演算部, 136 フレームメモリ, 151 動き評価値検出部, 152 画素精度動きベクトル検出部, 153,154 タップ抽出部, 156 クラス分類部, 157 係数メモリ, 158 予測演算部, 159 画素以下精度動きベクトル検出部, 171 基本巡回係数設定部, 172 動き分散検出部, 173 巡回係数算出部, 181 動き分散差し引き量算出部, 182 MCブロック差分算出部, 183 減算部, 201 巡回型変換部, 211 フレームメモリ, 212 動きベクトル検出部, 213 MCブロック差分検出部, 301 巡回型変換部, 311,312 フレームメモリ, 313 動きベクトル検出部, 314 MCブロック差分検出部, 401 CPU, 402 ROM, 403 RAM, 408 記録部, 410 ドライブ, 411 リムーバブルメディア